如何在 Isaac Sim 中导入和控制 SO100Arm Kit
简介
SO-100ARM 是由 TheRobotStudio 推出的完全开源的机械臂项目。它包括从动臂和主导机械臂,并提供详细的 3D 打印文件和操作指南。LeRobot 致力于为 PyTorch 提供真实世界机器人模型、数据集和工具。其目标是降低机器人技术的入门门槛,使每个人都能通过共享数据集和预训练模型来贡献和受益。
本文档提供了将 SO100 Arm Kit 机械臂导入 NVIDIA 的 Isaac Sim 仿真平台并使用 ROS2 和 Python 脚本进行控制的说明。
项目介绍
SO-ARM100 和 reComputer Jetson AI 智能机器人套件将高精度机械臂控制与强大的 AI 计算平台无缝结合,提供全面的机器人开发解决方案。该套件基于 Jetson Orin 或 AGX Orin 平台,结合 SO-ARM100 机械臂和 LeRobot AI 框架,为用户提供适用于教育、研究和工业自动化等多场景的智能机器人系统。 本文档提供了 SO ARM100 的组装和调试教程,并在 Lerobot 框架内实现数据收集和训练。

规格
| 规格 | Arm Kit | Arm Kit Pro |
|---|---|---|
| 类型 | Arm Kit | Arm Kit Pro |
| 自由度 | 6 | 6 |
| 最大扭矩 | 19.5kg.cm 7.4V | 30kg.cm 12V |
| 舵机 | STS3215 总线舵机 | STS3215 总线舵机 |
| 电源 | 5.5mm*2.1mm DC 5V4A | 5.5mm*2.1mm DC 12V1A |
| 角度传感器 | 12 位磁编码器 | 12 位磁编码器 |
| 推荐工作温度范围 | 0℃~40℃ | 0℃~40℃ |
| 通信方式 | UART | UART |
| 控制方式 | PC | PC |
材料清单 (BOM)
| 部件 | 数量 | 是否包含 |
|---|---|---|
| STS3215 舵机1 | 12 | ✅ |
| 电机控制板 | 2 | ✅ |
| USB-C 数据线 2 根 | 1 | ✅ |
| 电源2 | 2 | ✅ |
| 桌面夹具 | 1 | ❌ |
| 机械臂的 3D 打印部件 | 1 | ❌ |
3D 打印部件和桌面夹具不包含在产品中。然而,SO-100ARM 提供了详细的 3D 打印 STL 文件 和打印参数。此外,我们还提供了 桌面夹具的 3D 打印部件。
前置条件
安装 Lerobot 环境
步骤 1. 克隆 Lerobot 项目
cd ~/
git clone https://github.com/ZhuYaoHui1998/lerobot.git
cd lerobot
确保您已根据教程安装了 Lerobot 环境
将 URDF 导入 Isaac Sim
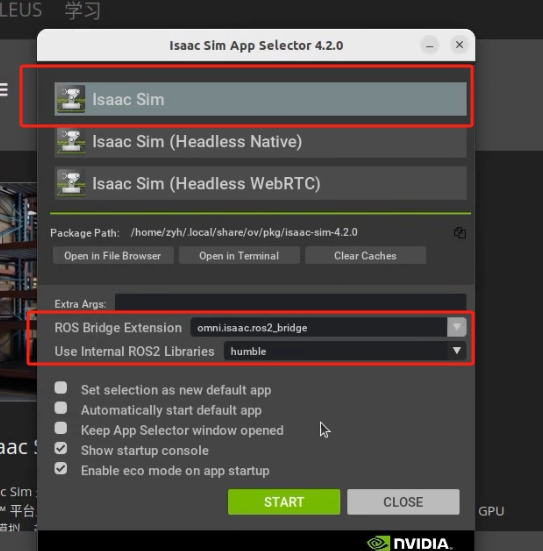
步骤 1. 打开 Isaac Sim
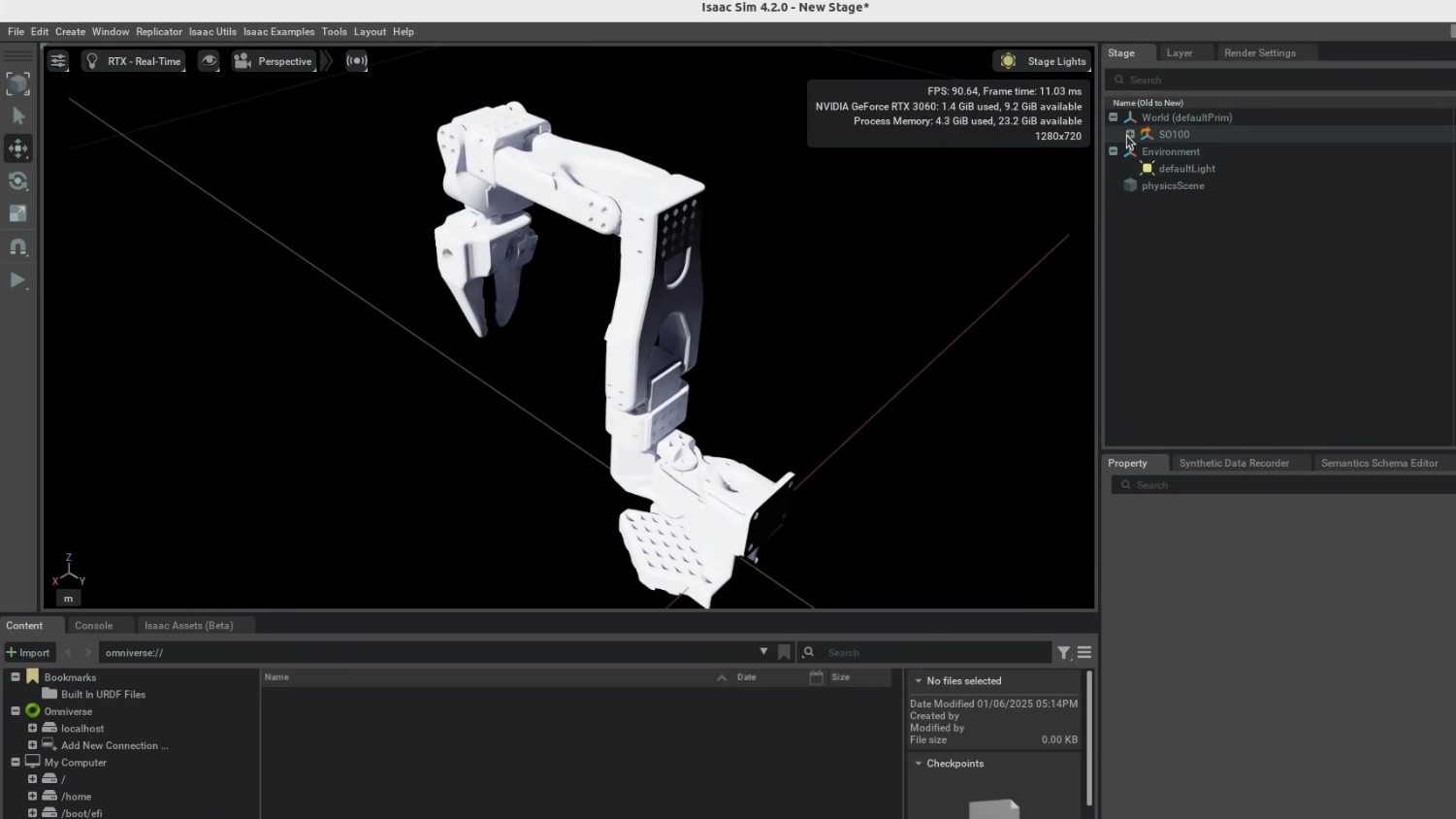
确保 Isaac Sim 已根据 NVIDIA 的 官方教程 安装,ROS2 已安装并完成基本环境配置。使用如下图所示的参数打开 Isaac Sim 界面。
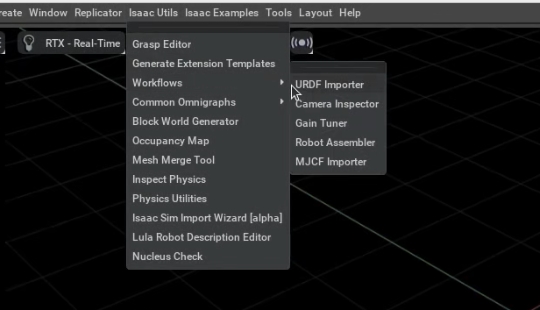
步骤 2. 使用 URDF 导入工具
在 Isaac Sim 工具栏中打开 Isaac Utils → Workflows → URDF Importer
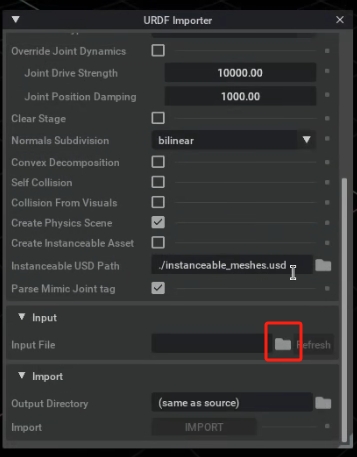
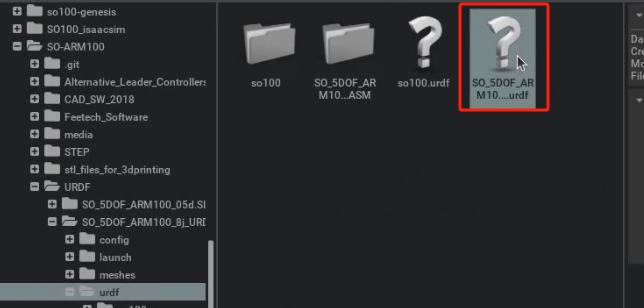
步骤 3. 导入 URDF
保持默认参数,在 Input 中浏览文件,并从克隆的 Lerobot 仓库中导入 URDF 文件,路径为 /lerobot/SO-ARM100/URDF/SO_5DOF_ARM100_8j_URDF.SLDASM/urdf/SO_5DOF_ARM100_8j_URDF.SLDASM.urdf
现在您可以看到我们的 SO100 机械臂已成功导入 Isaac Sim。
步骤 4. 添加物理元素
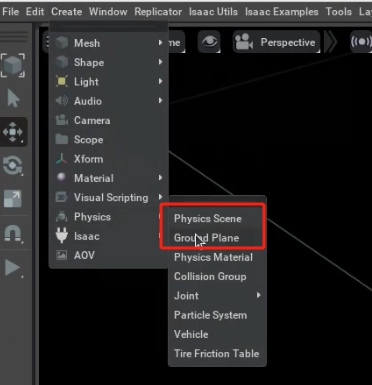
在 Isaac Sim 工具栏中,导航到 Create → Physics,并添加 Physics Scene 和 Ground Plane,以设置物理环境和地面。
步骤 5. 删除 root_joint 的 Articulation Root
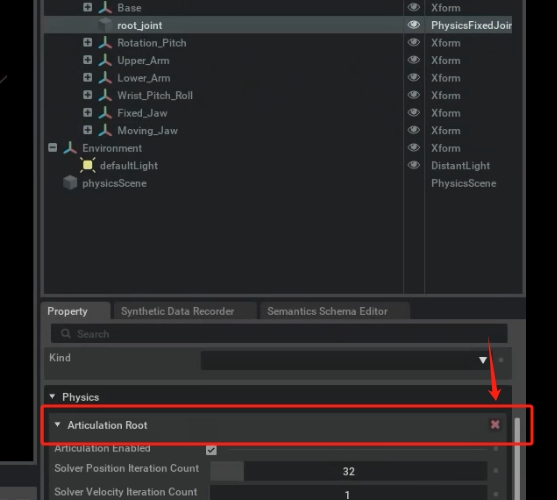
在右侧的 Stage 面板中,找到 root_joint。点击它,然后在下面的 Properties 中,找到 Physics 下的 Articulation Root,点击右侧的 × 删除该根节点。
步骤 6. 添加 root_joint 的 Articulation Root
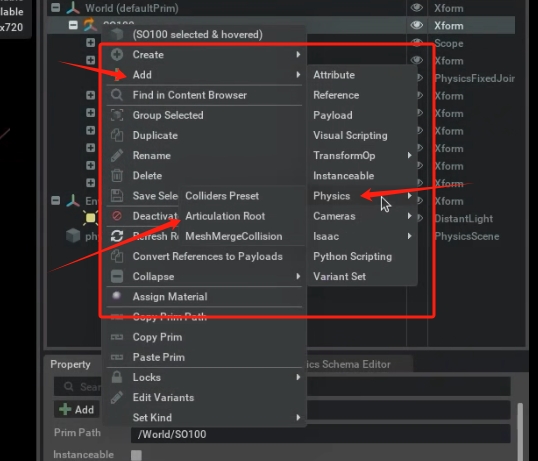
在 Stage 面板中,点击 SO100,右键单击,然后选择 Add → Physics → Articulation Root。
添加动作图
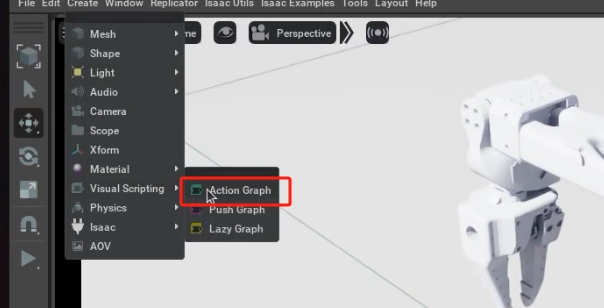
步骤 1. 在工具栏中,导航到 Create → Visual Scripting 并添加 Action Graph。
步骤 2. 添加动作组件
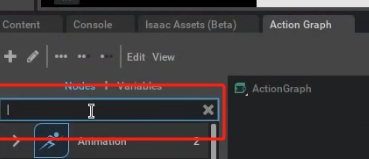
在搜索框中,按顺序添加:On Playback Tick、Isaac Read Simulation Time、ROS2 Publish Joint State、Articulation Controller、ROS2 Subscribe Joint State。
为了更清楚地理解这一部分,请根据视频内容执行动作连接和基本参数配置。
步骤 3. 播放
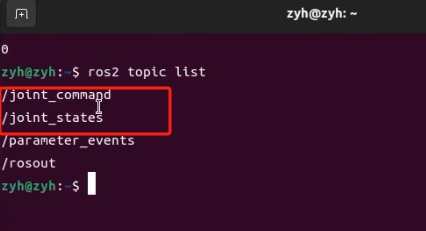
点击右侧的 Play 按钮以正常启动动作。此时,使用 ros2 topic list 命令查看主题信息。
通过 ROS2 Python 控制机械臂运动
现在,您可以在 ROS2 环境中运行以下 Python 脚本来控制机械臂。这些脚本文件位于 lerobot/lerobot/scripts/ 下,分别为 control_motor.py 和 lerobot_publisher.py。
control_motor.py 允许您单独发送特定舵机的角度,角度值范围为 -π 到 π。
control_motor.py
import threading
import rclpy
from sensor_msgs.msg import JointState
rclpy.init()
node = rclpy.create_node('position_velocity_publisher')
pub = node.create_publisher(JointState, 'joint_command', 10)
thread = threading.Thread(target=rclpy.spin, args=(node, ), daemon=True)
thread.start()
joint_state_position = JointState()
joint_state_position.name = ["Rotation", "Pitch","Elbow","Wrist_Pitch","Wrist_Roll","Jaw"]
joint_state_position.position = [0.2,0.2,float('nan'),0.2,0.2,0.2]
# joint_state_position.position = [0.0,0.0,0.0,0.0,0.0,0.0]
rate = node.create_rate(10)
try:
while rclpy.ok():
pub.publish(joint_state_position)
rate.sleep()
except KeyboardInterrupt:
pass
rclpy.shutdown()
thread.join()
lerobot_publisher.py 实现了向舵机连续发送动作指令。
lerobot_publisher.py
import rclpy
from rclpy.node import Node
from sensor_msgs.msg import JointState
import numpy as np
import time
class TestROS2Bridge(Node):
def __init__(self):
super().__init__("test_ros2bridge")
# 创建发布者。此发布者将发布 JointState 消息到 /joint_command 主题。
self.publisher_ = self.create_publisher(JointState, "joint_command", 10)
# 创建 JointState 消息
self.joint_state = JointState()
self.joint_state.name = [
"Rotation",
"Pitch",
"Elbow",
"Wrist_Pitch",
"Wrist_Roll",
"Jaw"
]
num_joints = len(self.joint_state.name)
# 确保 Kit 的编辑器处于播放状态以接收消息
self.joint_state.position = np.array([0.0] * num_joints, dtype=np.float64).tolist()
self.default_joints = [0, 0, 0, 0, 0, 0]
# 将运动限制在较小范围内(这不是机器人的范围,仅是运动范围)
self.max_joints = np.array(self.default_joints) + 0.3
self.min_joints = np.array(self.default_joints) - 0.3
# 使用位置控制让机器人围绕每个关节摆动
self.time_start = time.time()
timer_period = 0.05 # 秒
self.timer = self.create_timer(timer_period, self.timer_callback)
def timer_callback(self):
self.joint_state.header.stamp = self.get_clock().now().to_msg()
joint_position = (
np.sin(time.time() - self.time_start) * (self.max_joints - self.min_joints) * 0.5 + self.default_joints
)
self.joint_state.position = joint_position.tolist()
# 将消息发布到主题
self.publisher_.publish(self.joint_state)
def main(args=None):
rclpy.init(args=args)
ros2_publisher = TestROS2Bridge()
rclpy.spin(ros2_publisher)
# 显式销毁节点
ros2_publisher.destroy_node()
rclpy.shutdown()
if __name__ == "__main__":
main()
引用
TheRobotStudio 项目: SO-ARM100
Huggingface 项目: Lerobot
Dnsty: Jetson 容器
技术支持与产品讨论
感谢您选择我们的产品!我们致力于为您提供多种支持,以确保您使用我们的产品时获得尽可能顺畅的体验。我们提供多种沟通渠道,以满足不同的偏好和需求。