Lerobot 中 SO-ARM 的舵机调试工具
Lerobot 中 SO-ARM 的舵机调试工具
简介
舵机调试工具(Seeed_RoboController)是一款面向 Lerobot/SO-ARM 机械臂的图形化调试工具。通过该工具,你可以快速检测舵机状态、重新校准舵机 ID、写入中位值、单点控制舵机以及管理机械臂校准文件,从而更方便地完成主臂与从臂的组装、调试与维护。
一、安装
适用Windows,ubuntu,Mac系统
1.首先下载仓库
git clone https://github.com/Seeed-Projects/Seeed_RoboController.git
2.推荐安装在lerobot虚拟环境中,如需单独创立建议创立新的虚拟环境,避免污染系统 Python。
pip install -r requirements.txt
3.检查环境,返回[OK] 环境检查通过,即可以运行项目
python setup.py
4.进入
运行启动交互式选择端口
python -m src.gui.factory_calibration_tool
(可选)手动指定端口(如若端口被占用)
python -m src.gui.factory_calibration_tool --port1 /dev/ttyUSB0 --port2 /dev/ttyUSB1
二、开始使用(适用主臂和从臂)
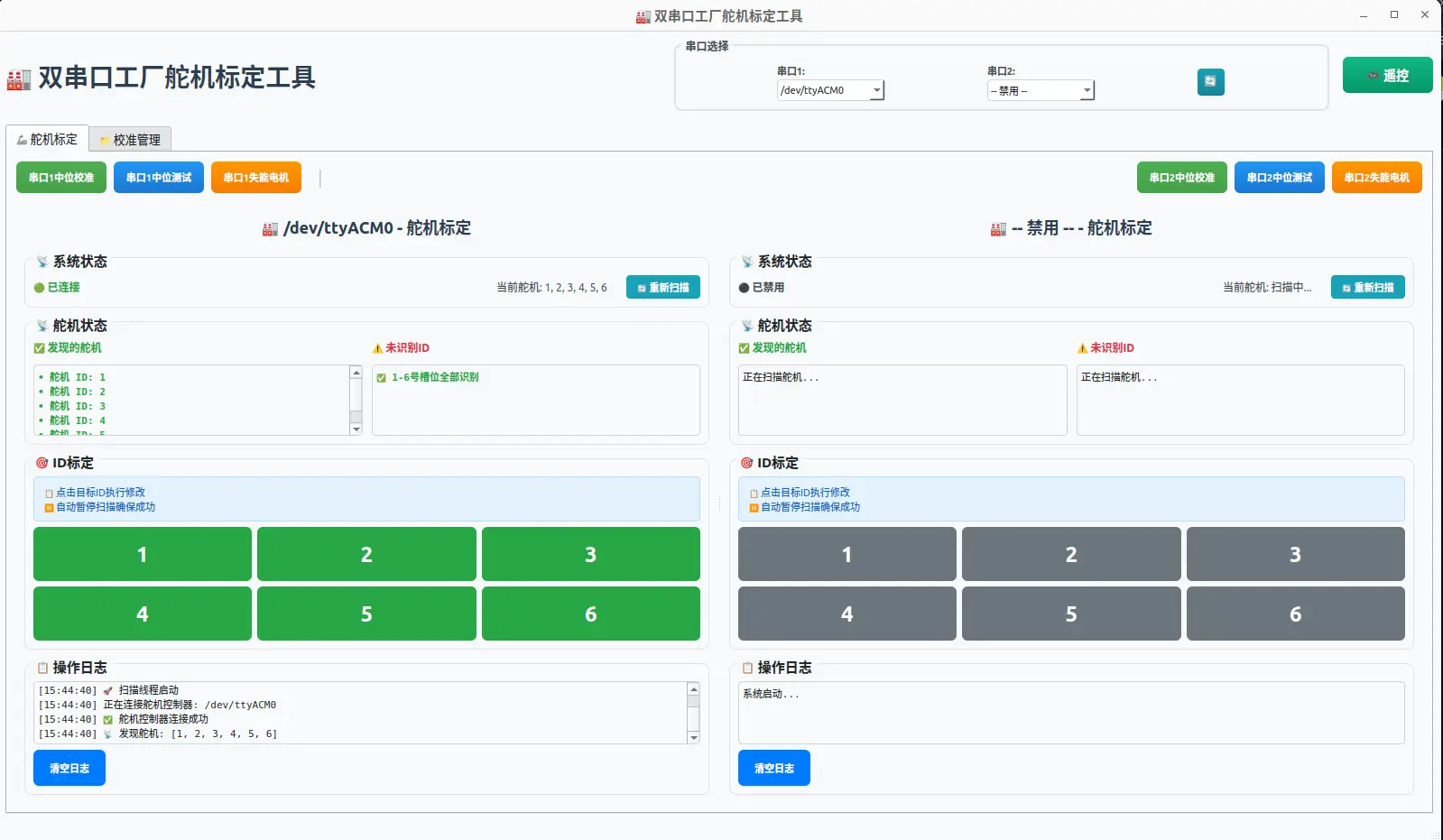
1.检测舵机是否正常
首先在串口选择上选择相应的端口号
如若1-6号舵机均成功检测,则说明舵机正常被识别,基本功能正常
如若显示有相关舵机未识别到,首先检查连线是否正常,关掉页面重新进入,如若还是未识别到,则可能舵机ID号出现重复现象(可能是输入校准机械臂的指令不小心输入成了校准舵机的指令)此时需要将这些舵机ID进行重新校准

2.拆除舵机线束
首先拆除6号舵机和5号舵机的连接线束

而后拆除5号舵机和4号舵机的连接线束
拆除4号舵机和3号舵机的连接线束
拆除3号舵机和2号舵机的连接线束
拆除2号舵机和1号舵机的连接线束
拆除1号舵机和控制板的连接线束
3.重新校准舵机ID
确保只有一个舵机连接到机械臂上
(给舵机刷入ID时,由于是串口总线,如果存在重复id,例如将4改成6,总线上的所有4号舵机均会修改为6,所以需要将所有的舵机进行拆除逐个进行重新写入ID)
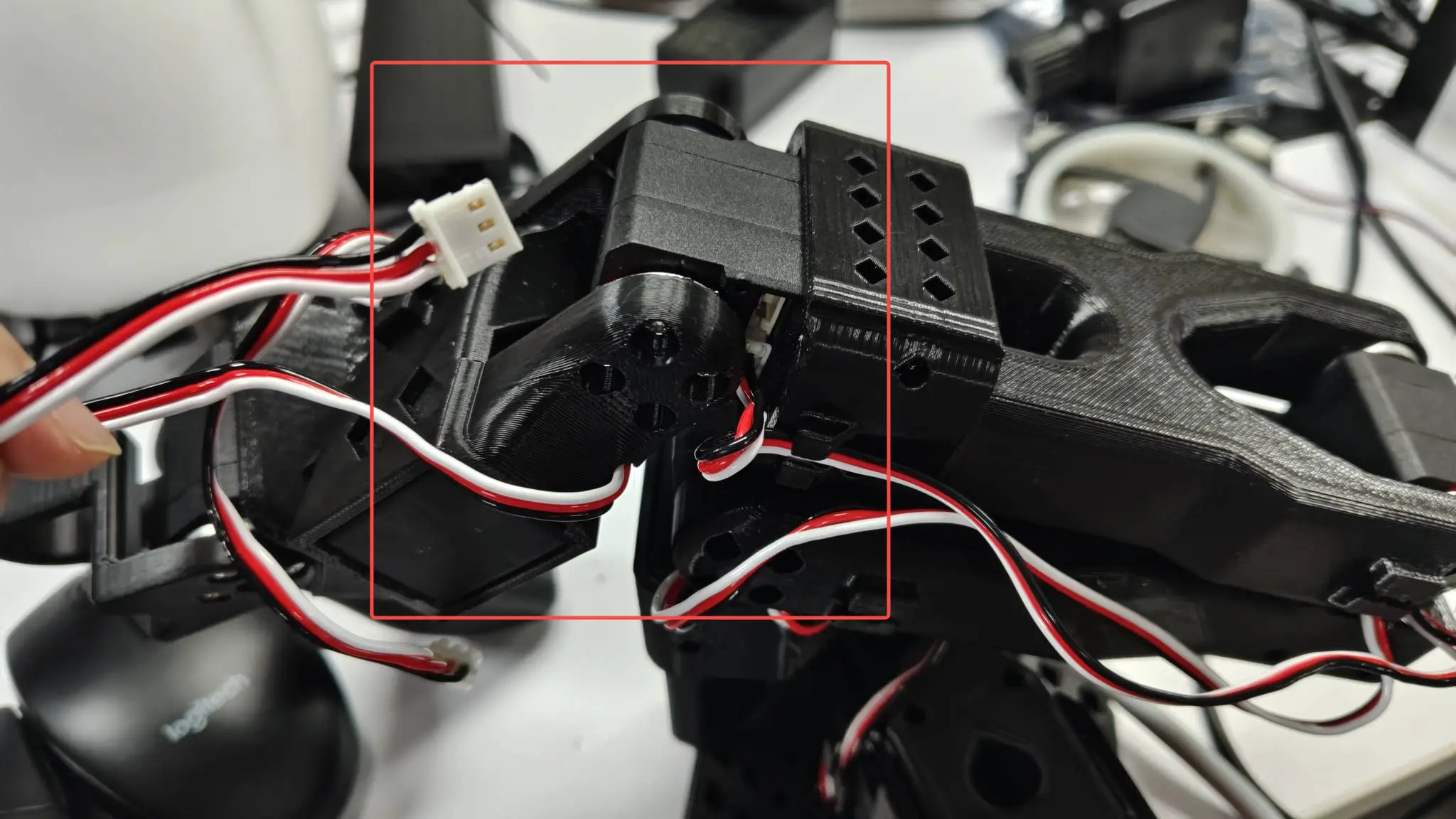
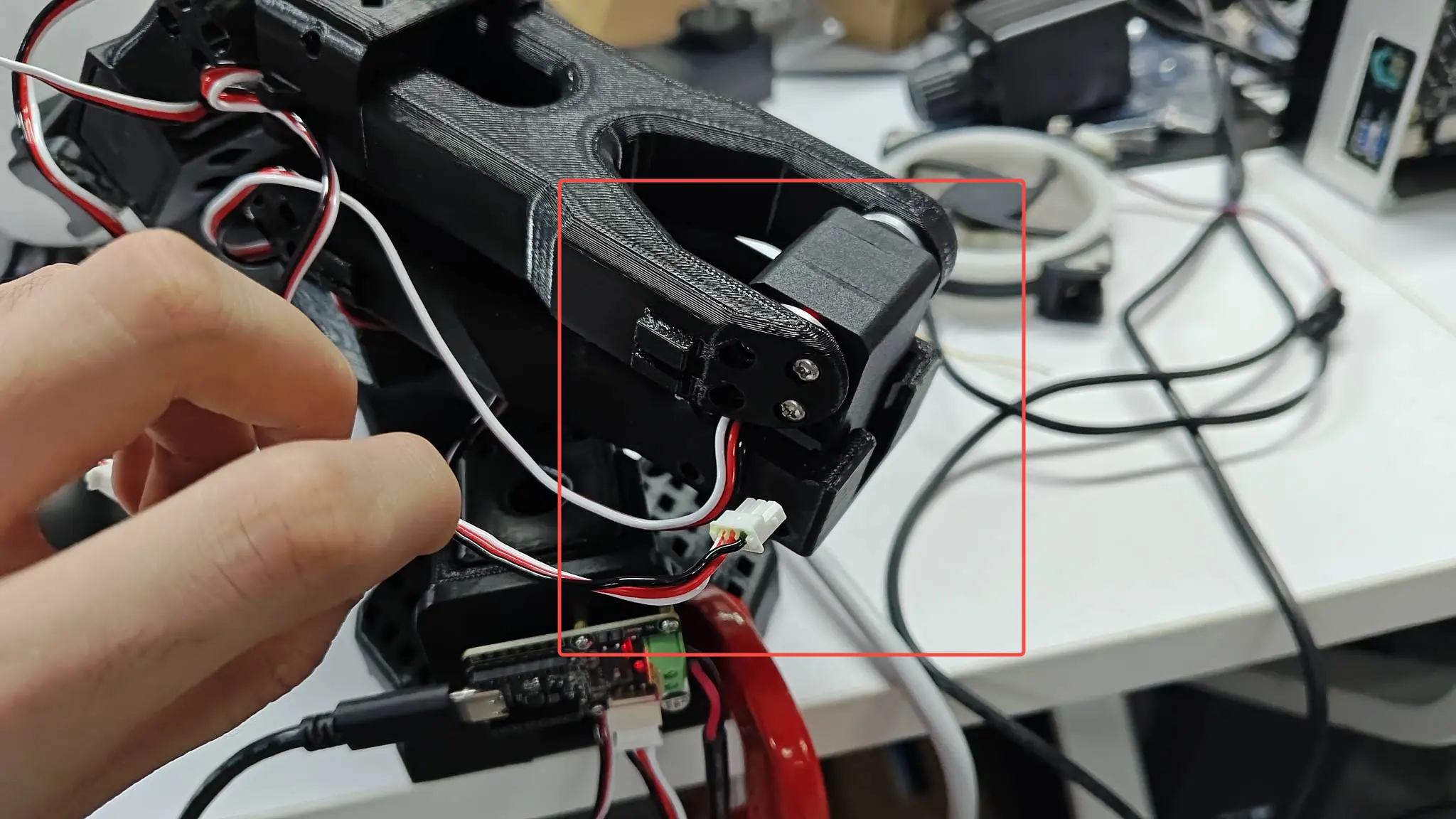
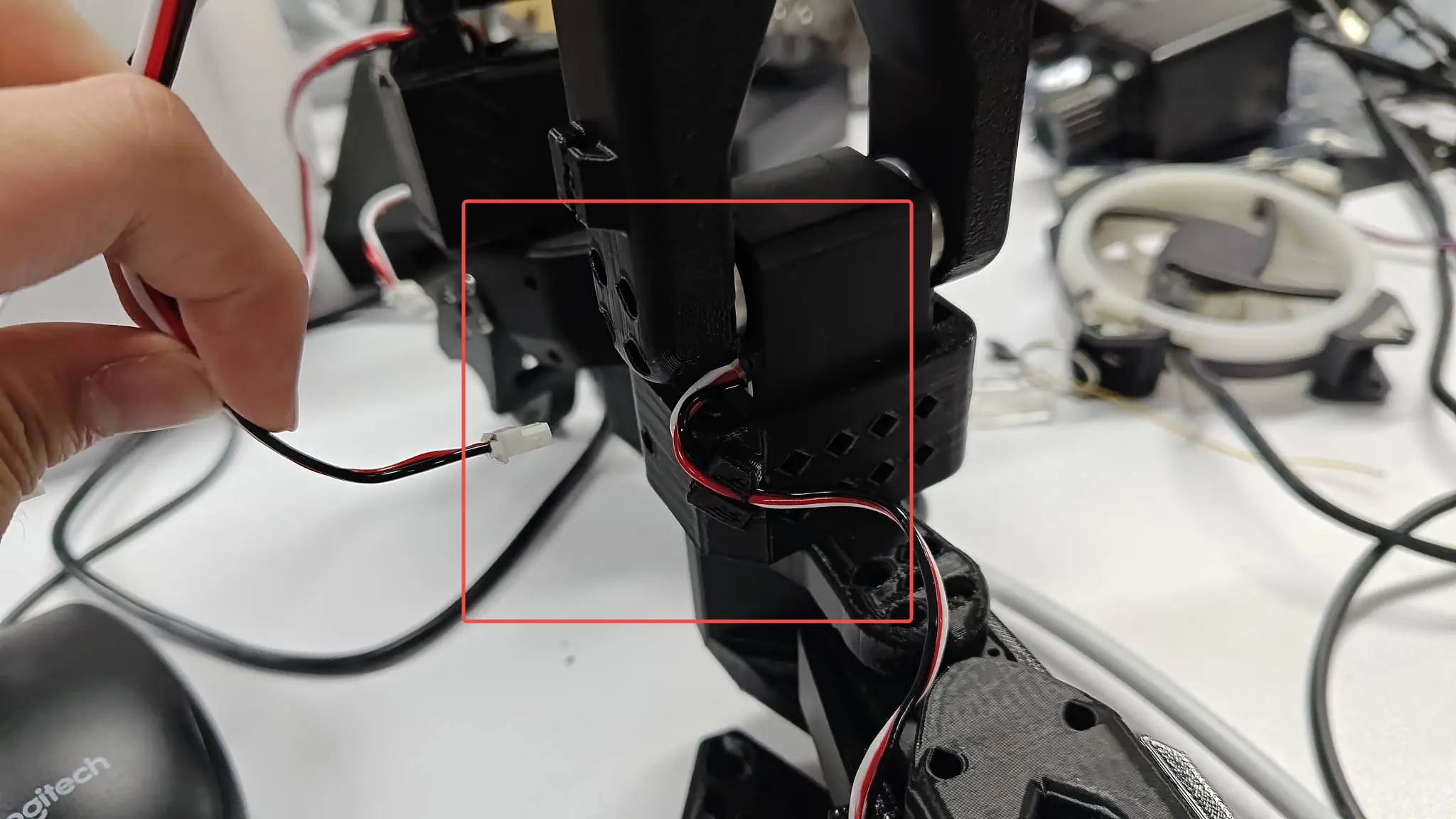
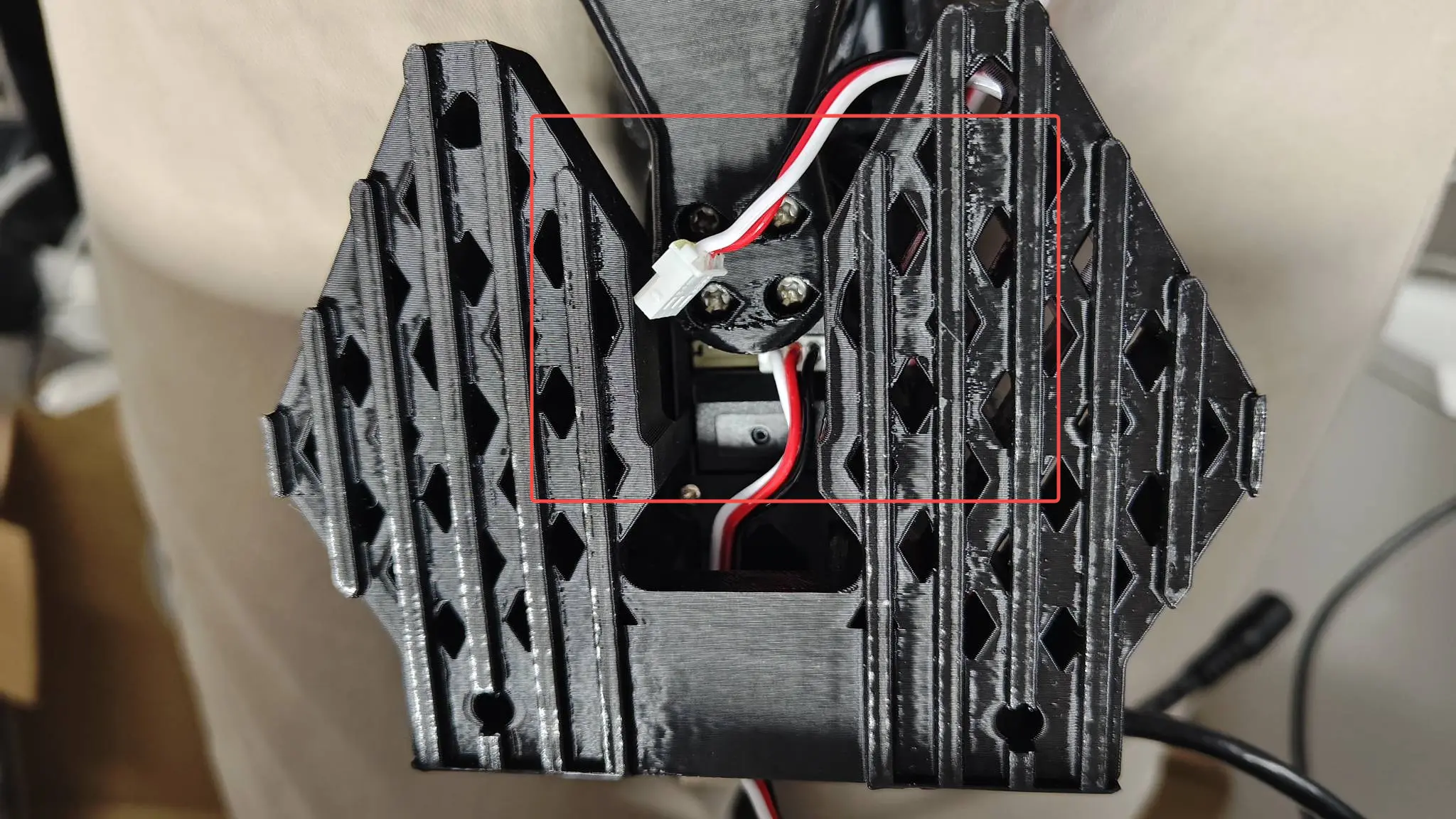
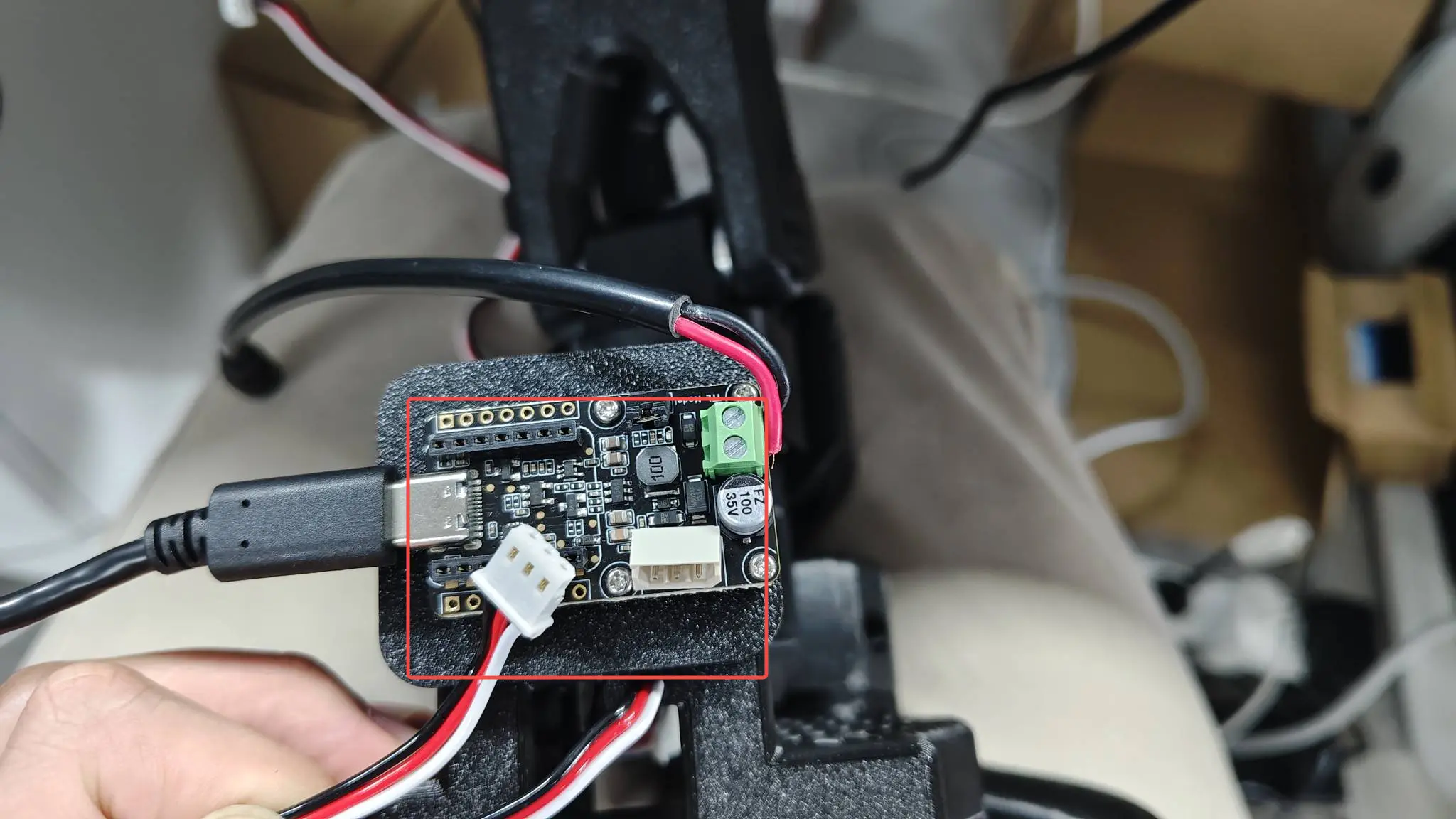
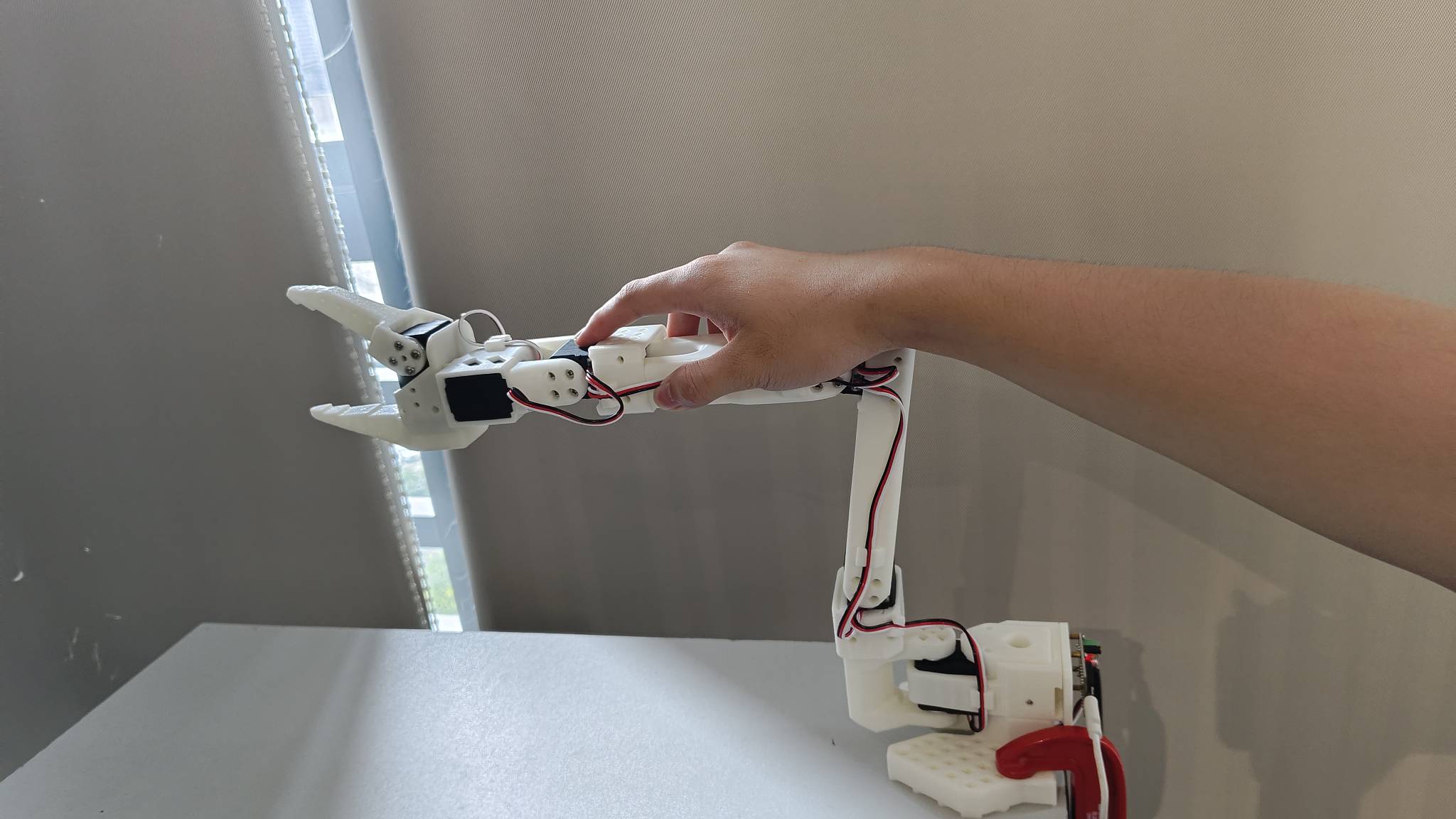
例如可以通过如下方式将6号舵机与驱动板进行连接,其他舵机连接方式类似,可避免拆卸机械臂
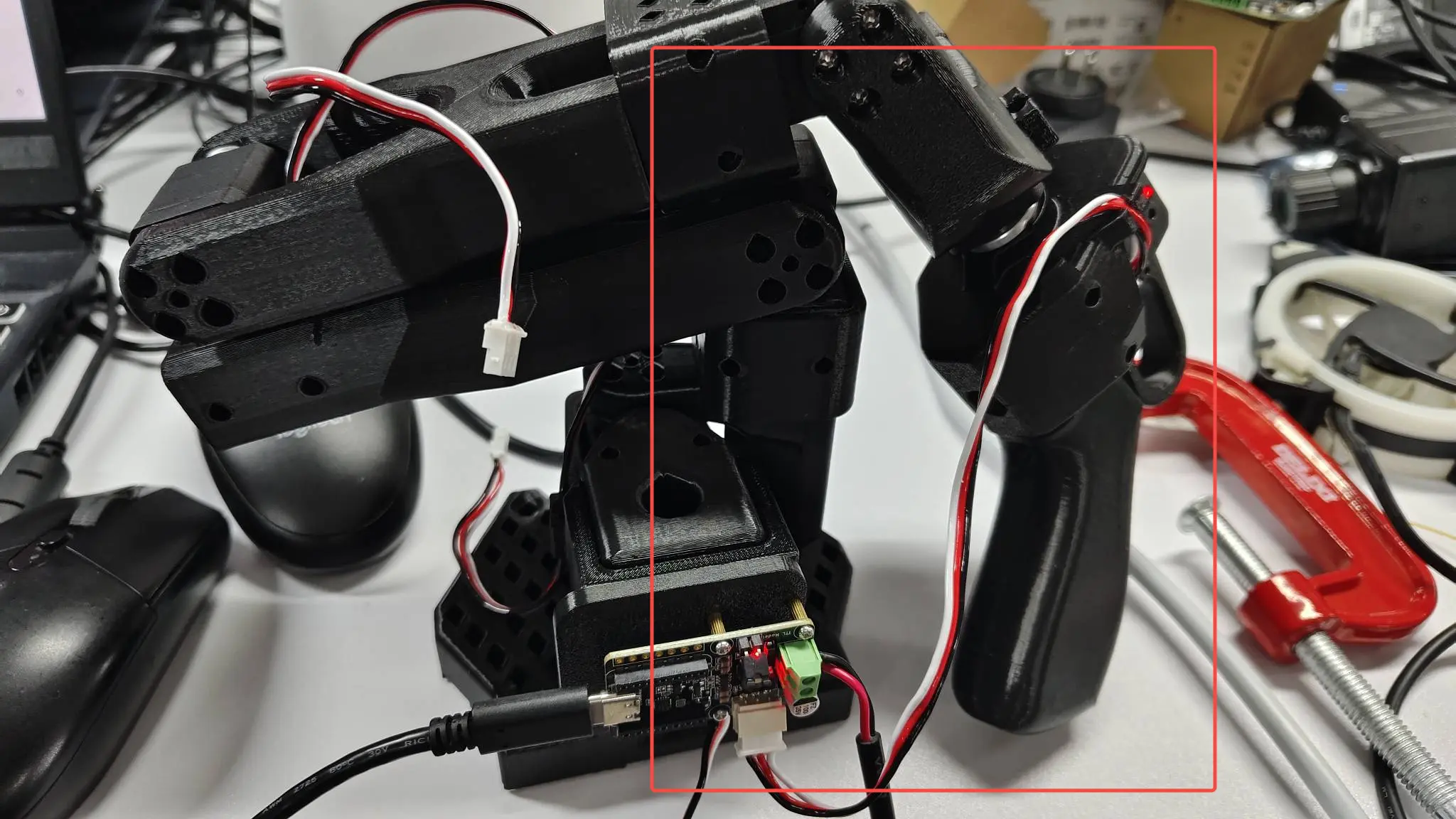
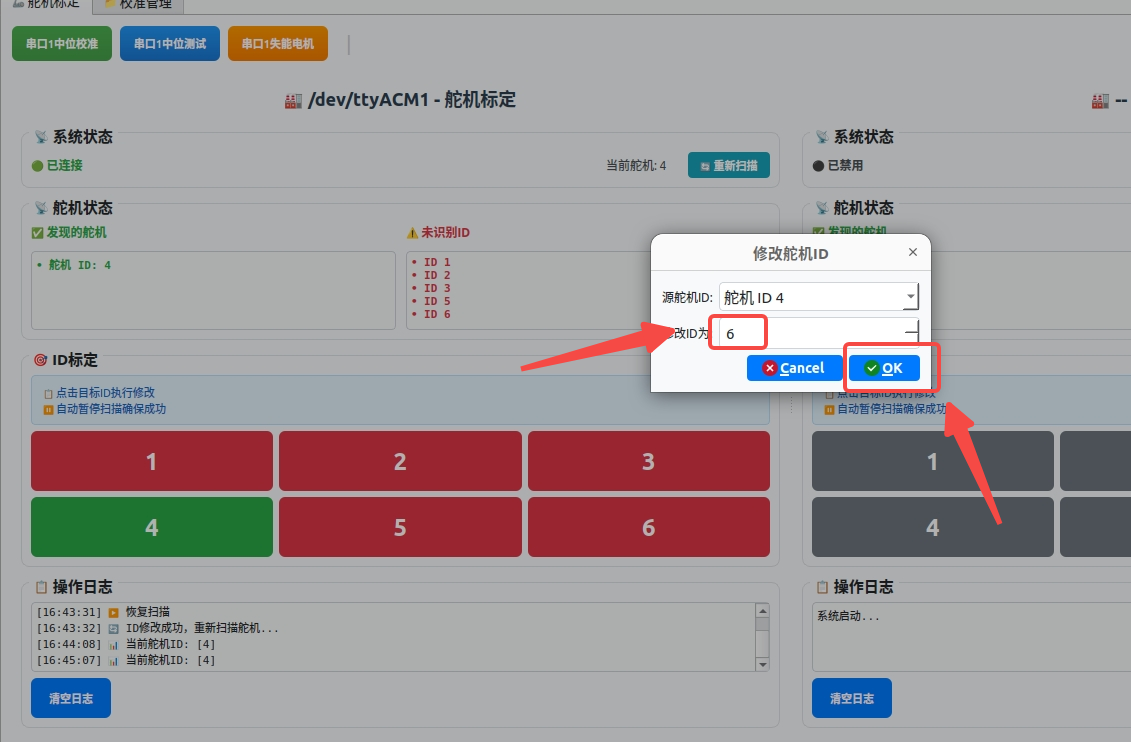
如图所示,可以看到只识别到了4号舵机,但实际上我连接的是6号舵机,此时则说明我的舵机ID号是错误的,需要将舵机ID修改回6

此时,可以点击4号舵机,将其ID修改为6,其他的舵机操作一致
将舵机校准完成之后可以依次将线插入,即可完成
4.中位值写入舵机
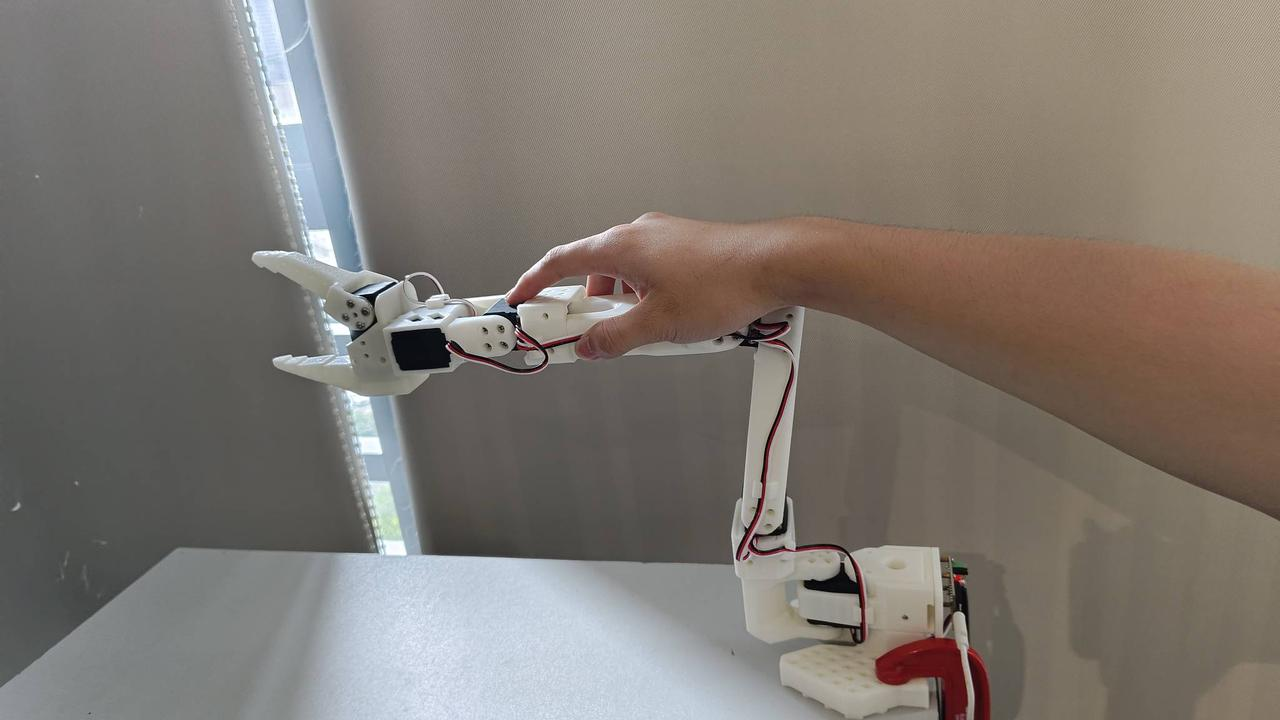
1.点击串口中位测试,查看机械臂中位是否如上图所示,如果大致如上图所示,则机械臂的中位值正常
2.如果不为上,把机械臂移动至中位,而后点击串口中位校准,机械臂会将当前位置当作中位写入舵机中
3.点击串口失能电机,机械臂将会软掉需要用手进行辅助扶一下

5.单个舵机控制
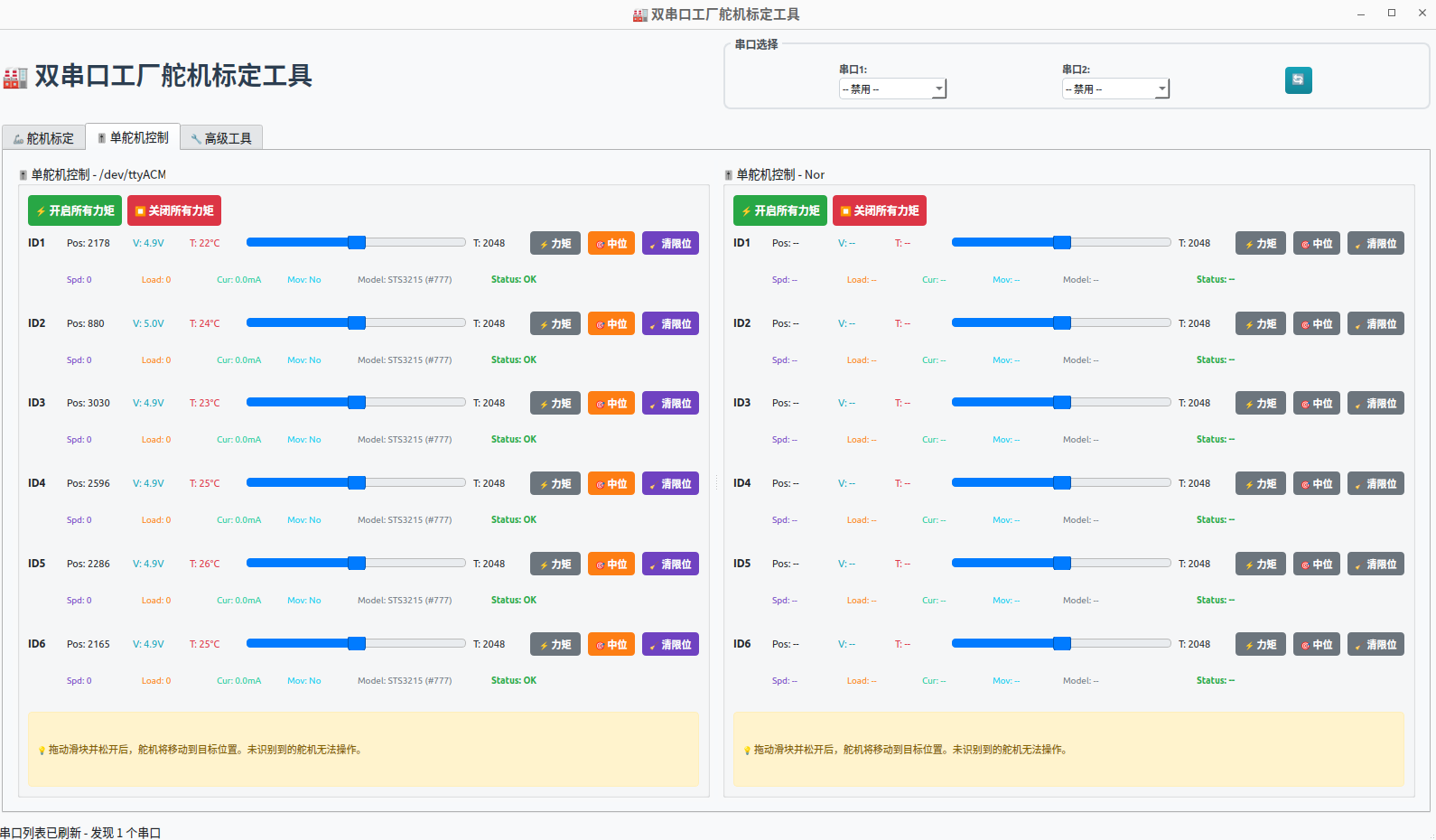
页面中默认位置的所有舵机的中位,如图所示
- 1.首先开启力矩,可一键开启所有力矩或单个舵机力矩,即可滑动进度条使得舵机达到相应的位置,但需要注意缓慢移动,而且由于舵机实际上的打印件会卡住相应的位置,所以实际上没法到达边缘位置,会有最大运动地方和最小运动地方,所以不能将进度条滑为0或最大。 关闭力矩后机械臂会软下。
根据上图所示,开启力矩后运动相应的舵机会有变化
- 2.可以对单个舵机进行中位校准和清除舵机内部中位和最大最小位
- 3.以下是舵机信息
Pos:位置
V:电压
T:温度
Spd:速度
Load:力矩
Cur:电流
Mov:运动状态
Model:型号,权限
Status:状态会显示正常或过流,过载
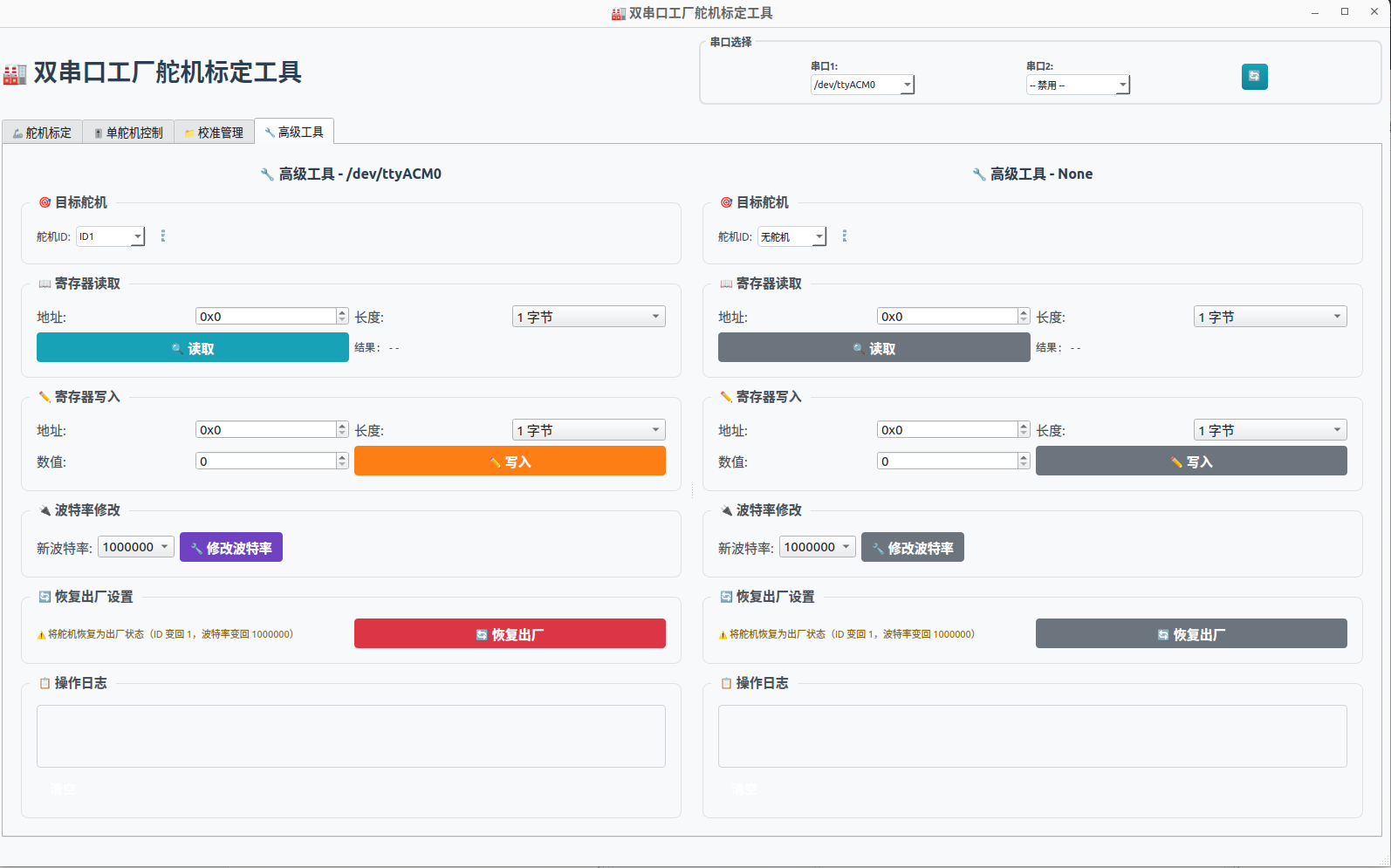
6、高级工具
可读取相应的寄存器地址数据并且写入相应数据
可修改波特率
可恢复出厂设置