XIAO 和 Arduino 中 24GHz 毫米波传感器的开发
本节介绍如何使用 XIAO 毫米波库和二次开发。
本 Wiki 的所有内容仅适用于 XIAO 24GHz 毫米波传感器,可能不适用于其他毫米波传感器。
入门指南
硬件准备
在开始本文的教程内容之前,我们建议您购买我们目前销售的任何一款 XIAO,以便使用毫米波传感器。
| Seeed Studio XIAO SAMD21 | Seeed Studio XIAO RP2040 | Seeed Studio XIAO nRF52840 (Sense) | Seeed Studio XIAO ESP32C3 | Seeed Studio XIAO ESP32S3 |
|---|---|---|---|---|
 |  |  |  |  |
在本文的教程中,我们将使用 XIAO ESP32C3 和毫米波传感器作为使用示例,指导您如何使用传感器的 Arduino 库和相关功能。
| Seeed Studio XIAO ESP32C3 | 24GHz mmWave for XIAO |
|---|---|
| 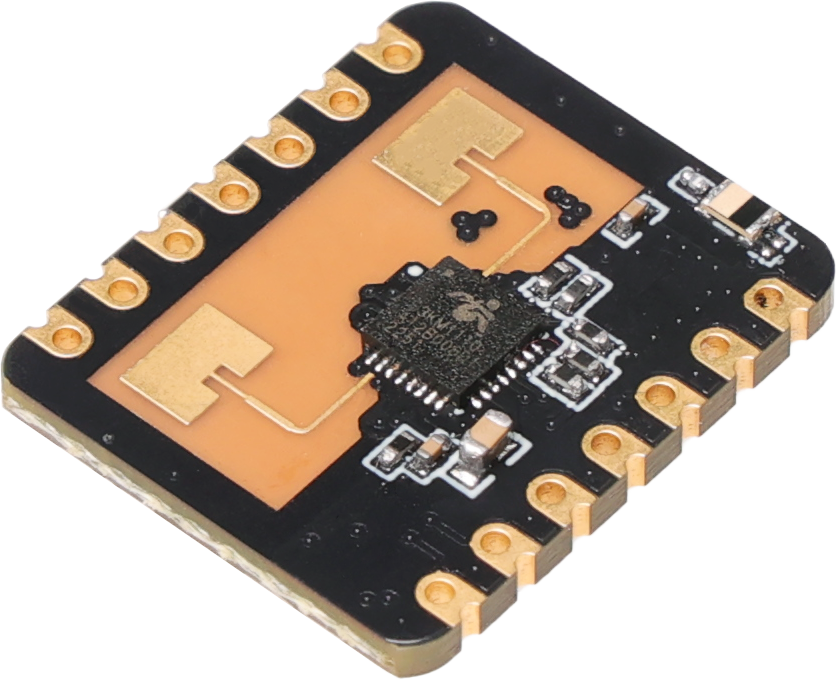 |
该传感器专为 XIAO 兼容性而设计,因此一般来说,如果您想使用此传感器,您需要准备一个 XIAO 并为传感器安装母头排针。连接到 XIAO 时,请特别注意传感器的安装方向,请不要插反,否则很可能烧坏传感器或 XIAO。
正确的方向是传感器的天线应朝外。
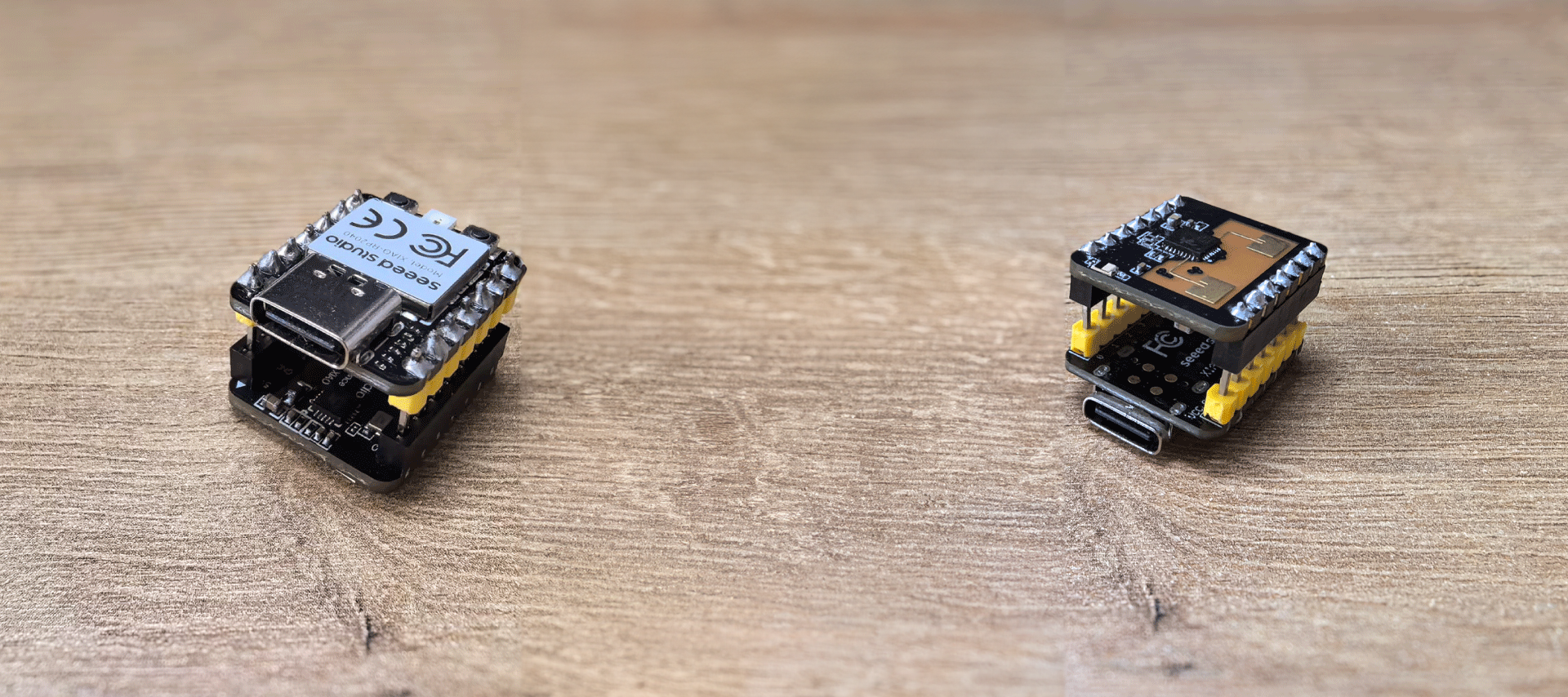
确认连接方向正确后,您可以将 USB-C 类型电缆连接到计算机或电源,传感器将开始工作。
软件准备
由于传感器使用的默认波特率为 256000,而 XIAO 设计的软串口波特率可能无法满足如此高速的波特率数据传输,我们需要在使用传感器之前使用软件调整传感器的波特率。然后,请根据您使用的手机系统下载相应的 APP。
APP 无法读取波特率。即使修改后,APP 仍显示默认波特率。
Arduino 库概述
如果这是您第一次使用 Arduino,我们强烈建议您参考 Arduino 入门指南。
函数
在我们开始开发代码之前,让我们先了解一下库的可用函数。
-
Seeed_HSP24(Stream &serial)—— 用于传入传感器连接的串口并开始初始化传感器。-
输入参数:
- serial:传感器连接的串口。
-
-
Seeed_HSP24(Stream &serial, Stream &debugSerial)—— 用于传入传感器连接的串口,添加调试串口并开始初始化传感器。-
输入参数:
- serial:传感器连接的串口。
- debugSerial:启用串口调试并在传入的串口中输出。
-
-
String getVersion()—— 获取传感器的软件版本号。- 返回值:传感器的软件版本号。
-
RadarStatus getStatus()—— 获取传感器的状态信息,传感器报告的所有信息都将由此函数解析。- 返回值:
- radarStatus.radarMode:工程模式或基础模式。1 对应工程模式,2 对应基础模式。
- radarStatus.targetStatus:表示监控对象的当前情况。总共有四种情况(NoTarget),第一种是未检测到人(MovingTarget),第二种是检测到有人静止(StaticTarget),第三种是同时检测到(BothTargets),第四种是异常(ErrorFrame)。其中 BothTarget 指的是有人运动。因为传感器监控当前环境,运动能量和静止能量都超过设定阈值,所以我们命名为"BothTarget",如果只有运动能量超过阈值,那么它将输出"MovingTarget"。
- radarStatus.distance:此值指传感器检测到的与被检测对象的距离。
- radarStatus.radarMovePower.moveGate(在工程模式下有效):此数组存储不同距离门的运动能量值。
- radarStatus.radarStaticPower.staticGate(在工程模式下有效):此数组存储不同距离门的静态能量值。
- radarStatus.photosensitive(在工程模式下有效):此值指传感器光敏值,范围 0-255。
- 返回值:
-
DataResult sendCommand(const byte* sendData, int sendDataLength)—— 通过此函数向传感器发送命令。-
输入参数:
- sendData:发送的命令帧数组。
- sendDataLength:发送的命令帧长度。
-
返回值:
- resultBuffer:指向动态分配的数组。
- length:数组的长度。
-
-
AskStatus setDetectionDistance(int distance,int times)—— 使用此函数配置最大距离门和无人持续时间。- 输入参数:
- distance:配置最大距离门。
- times:无人持续时间。
- 输入参数:
-
返回值:
- 成功 0x00 或错误 0x01。
-
AskStatus setGatePower(int gate,int movePower, int staticPower)—— 使用此函数配置不同距离门以及灵敏度。-
输入参数:
- gate: 到门的距离,范围 0-8 米。
- movePower: 触发运动阈值的能量值。
- staticPower: 触发静止阈值的能量值。
-
返回值:
- 成功 0x00 或错误 0x01。
-
-
RadarStatus getConfig()—— 读取设置传感器的参数值。- 返回值:
- radarStatus.detectionDistance: 雷达运动检测距离门数量。
- radarStatus.moveSetDistance: 雷达静止检测距离门数量。
- radarStatus.staticSetDistance: 雷达最长检测范围门。
- radarStatus.noTargrtduration: 无人持续时间。
- 返回值:
-
AskStatus setResolution(int resolution)—— 设置到门的距离分辨率,1 为 0.25M,0 为 0.75M。默认 0.75M。-
输入参数:
- resolution: 1 为 0.25M,0 为 0.75M。默认 0.75M。
-
返回值:
- 成功 0x00 或错误 0x01。
-
-
RadarStatus getResolution()—— 获取到门的距离分辨率,1 为 0.25M,0 为 0.75M。默认 0.75M。- 返回值:
- radarStatus.resolution: 1 为 0.25M,0 为 0.75M。默认 0.75M。
- 返回值:
-
AskStatus rebootRadar()—— 重启雷达命令。- 返回值:
- 成功 0x00 或错误 0x01。
- 返回值:
-
AskStatus refactoryRadar()—— 将雷达恢复到出厂设置。- 返回值:
- 成功 0x00 或错误 0x01。
- 返回值:
-
AskStatus enableEngineeringModel()—— 启用传感器工程模式输出。- 返回值:
- 成功 0x00 或错误 0x01。
- 返回值:
-
AskStatus disableEngineeringModel()—— 退出工程模式输出。- 返回值:
- 成功 0x00 或错误 0x01。
- 返回值:
默认变量
#define BUFFER_SIZE 256 // Serial Buffer Size
class Seeed_HSP24
{
public:
static const int FRAME_START_SIZE = 4;
static const int FRAME_END_SIZE = 4;
static const byte frameStart[FRAME_START_SIZE];
static const byte frameEnd[FRAME_END_SIZE];
static const byte frameAskStart[FRAME_START_SIZE];
static const byte frameAskEnd[FRAME_END_SIZE];
struct RadarMovePower // Energy value per movement distance gate
{
int moveGate[9] = {-1, -1, -1, -1, -1, -1, -1, -1, -1};
};
struct RadarStaticPower // Energy value per stationary distance gate
{
int staticGate[9] = {-1, -1, -1, -1, -1, -1, -1, -1, -1};
};
// Define the TargetStatus enum class
enum class AskStatus : byte
{
Success = 0x00, // Success
Error = 0x01, // Failed
};
// 定义TargetStatus枚举类
enum class TargetStatus : byte
{
NoTarget = 0x00, // No target
MovingTarget = 0x01, // Moving target
StaticTarget = 0x02, // Static target
BothTargets = 0x03, // It can be interpreted as motion, meaning that both the set motion and stationary thresholds are above the set value
ErrorFrame = 0x04 // Failed to get status
};
// Define the RadarStatus structure
struct RadarStatus
{
TargetStatus targetStatus = TargetStatus::ErrorFrame; // Target status of the radar
int distance = -1; // Target distance of the radar in mm
int moveSetDistance = -1; // The number of motion detection distance gates of the radar, which generally do not have to be configured
int staticSetDistance = -1; // Number of static detection distance gates of the radar, which generally do not have to be configured
int detectionDistance = -1; // Radar's longest detection range gate
int resolution = -1; // Distance gate resolution of radar
int noTargrtduration = -1; // Unmanned duration
int radarMode = -1; // Used to distinguish whether the module is in basic reporting mode (2) or engineering reporting mode (1)
RadarMovePower radarMovePower; // Exercise Energy Value
RadarStaticPower radarStaticPower; // Stationary energy value
int photosensitive = -1; // Photosensitive 0-255
};
// Used to return the result of an issued command
struct DataResult
{
byte *resultBuffer; // Points to a dynamically allocated array
int length; // Length of the array
};
};
安装
由于您已经下载了zip库文件,请打开您的Arduino IDE,点击Sketch > Include Library > Add .ZIP Library。选择您刚刚下载的zip文件,如果库安装正确,您将在通知窗口中看到Library added to your libraries。这意味着库已成功安装。

XIAO示例
现在我们已经安装了库并了解了基本功能,让我们运行一些24GHz毫米波传感器的示例来看看它的表现。
步骤1. 启动Arduino应用程序。
步骤2. 选择您的开发板型号并将其添加到Arduino IDE中。
-
如果您想在后续例程中使用Seeed Studio XIAO SAMD21,请参考**此教程**完成添加。
-
如果您想在后续例程中使用Seeed Studio XIAO RP2040,请参考**此教程**完成添加。
-
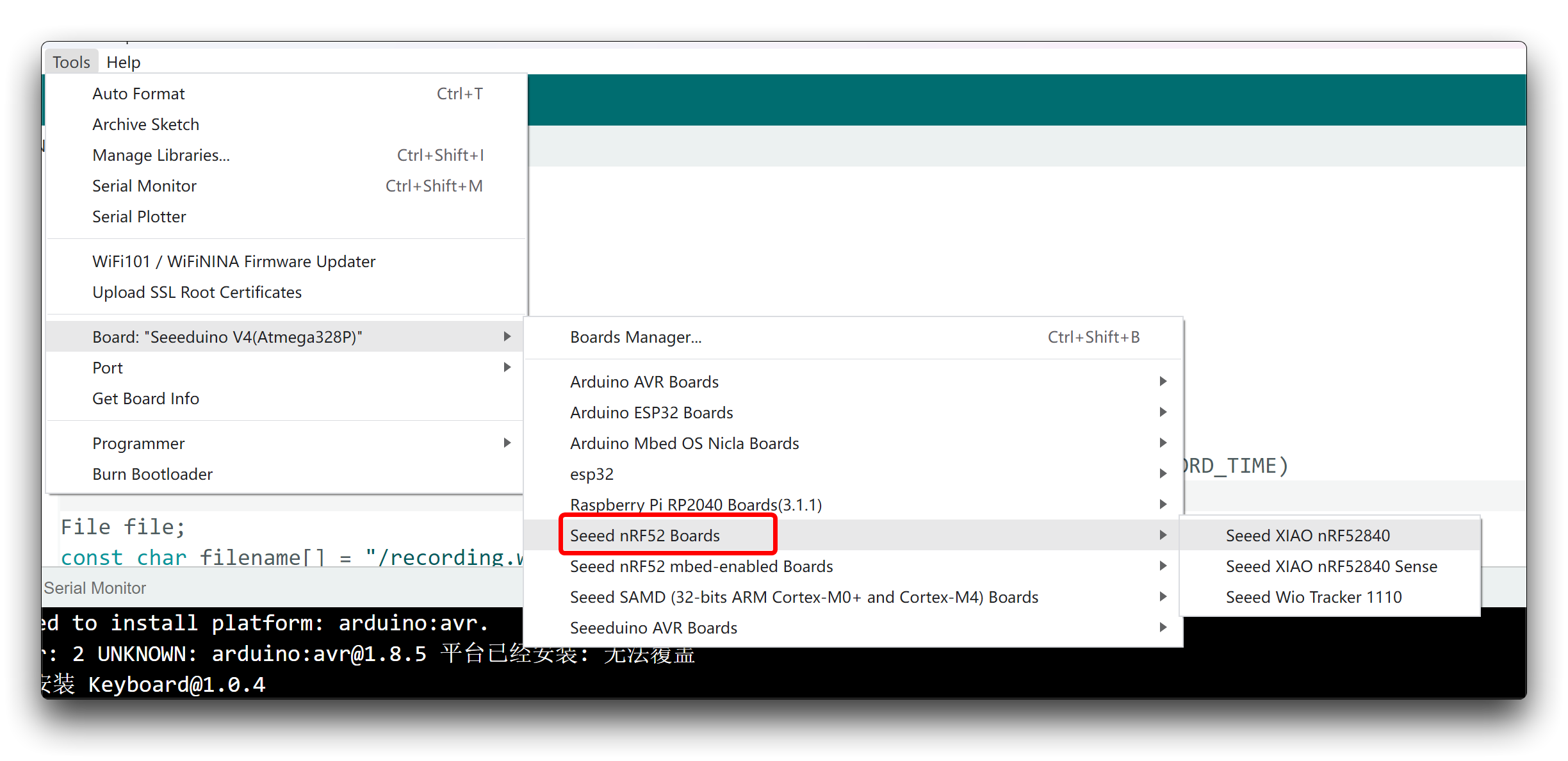
如果您想在后续例程中使用Seeed Studio XIAO nRF52840,请参考**此教程**完成添加。
-
如果您想在后续例程中使用Seeed Studio XIAO ESP32C3,请参考**此教程**完成添加。
-
如果您想在后续例程中使用Seeed Studio XIAO ESP32S3,请参考**此教程**完成添加。
本教程将以XIAO ESP32C3为例。
步骤3. 将传感器连接到XIAO,并通过USB-C类型线缆将XIAO连接到PC。
步骤4. 打开下载的HLKRadarTool APP并为传感器配置适当的波特率。
打开应用程序,应用程序会搜索附近的雷达设备。设备的广播名称是HLK-LD2410_xxxx(xxxx是mac地址的最后四位数字)。
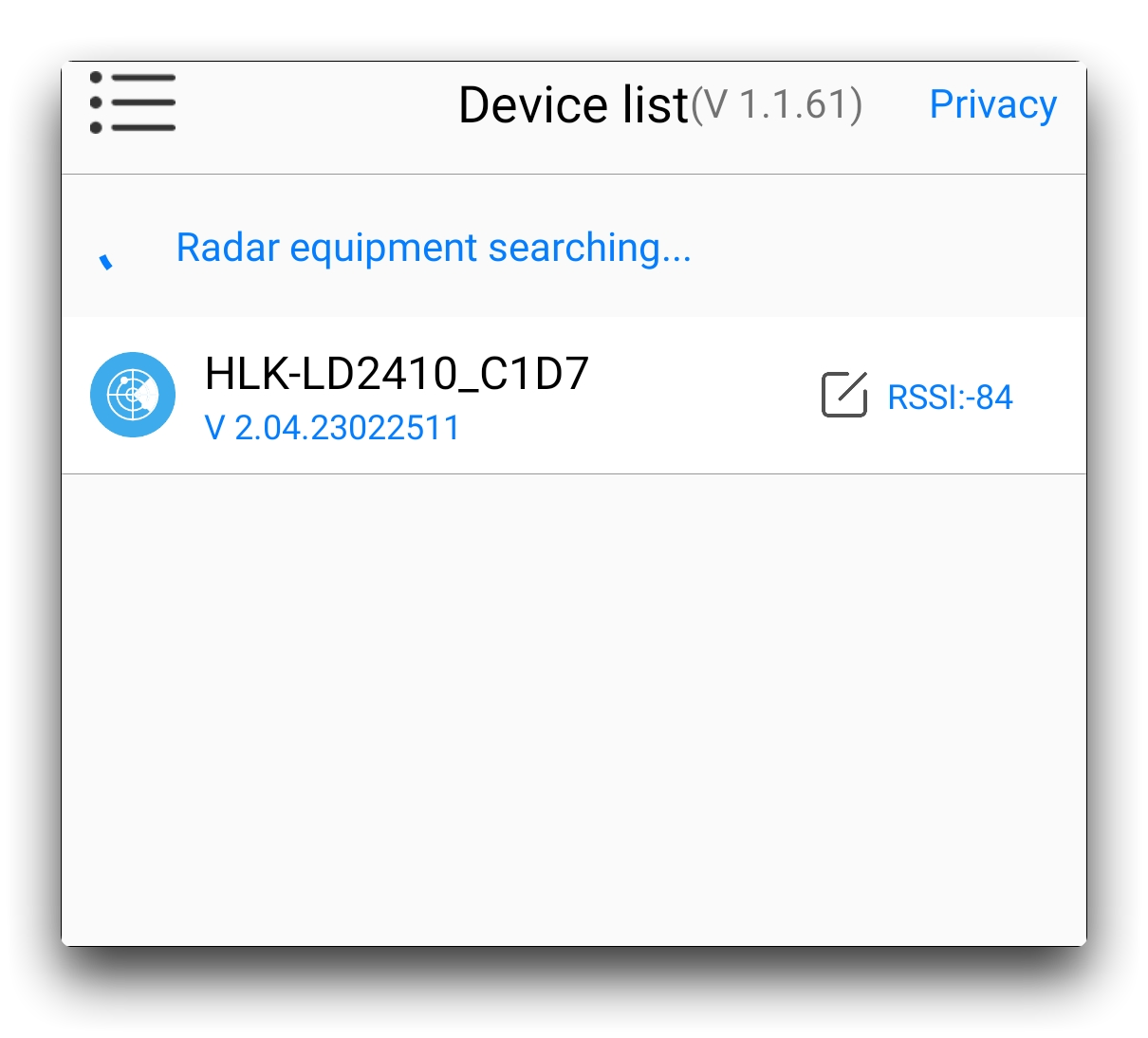
在软件右上角的More选项中,您可以访问设置菜单来为传感器设置自定义参数和功能。请将传感器的波特率设置为9600并保存。
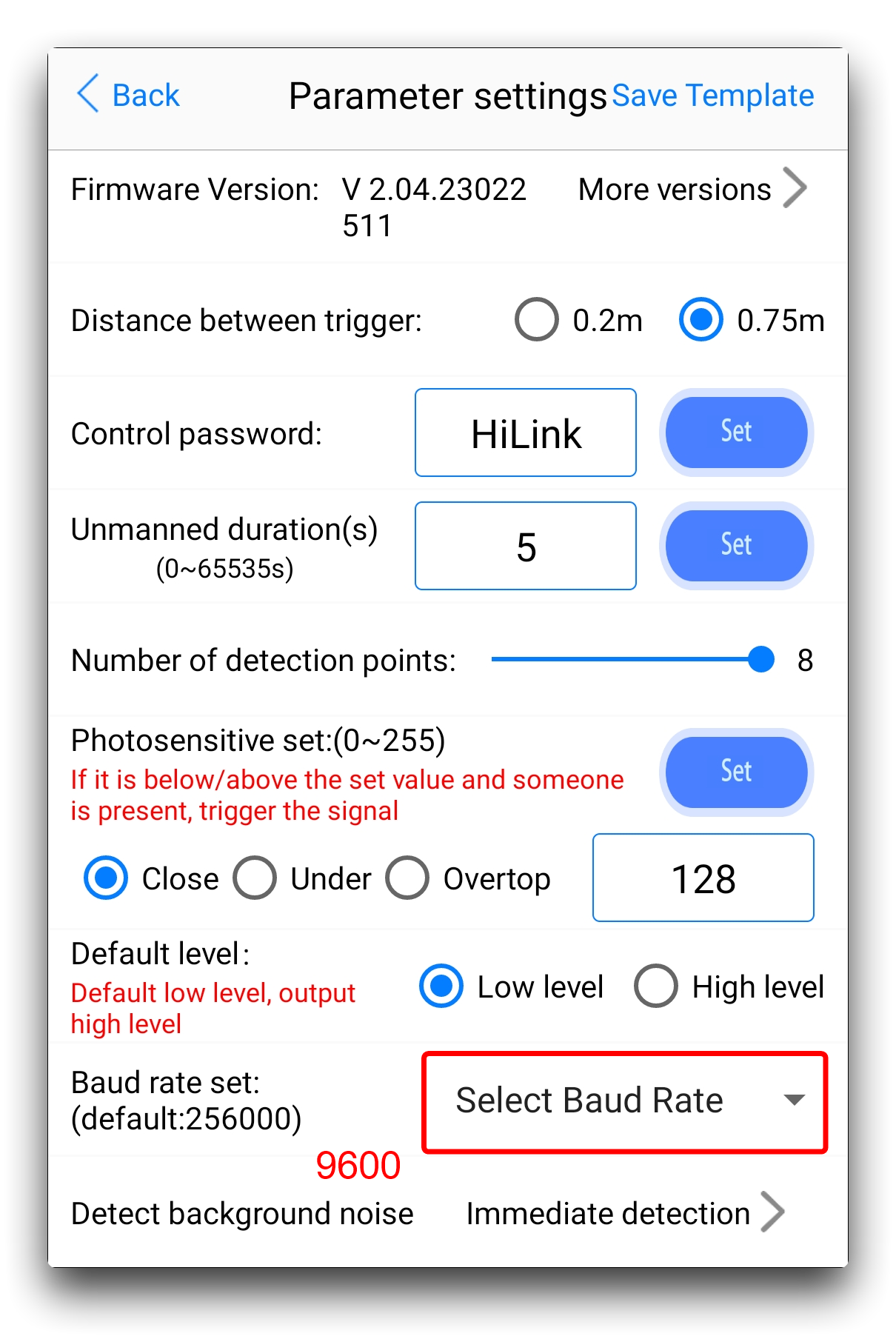
之后,等待传感器重启。
步骤5. 添加必要的库。
除了需要添加到Arduino环境中的传感器库之外,如果您使用的是ESP32系列XIAO,那么您可能需要单独安装软串口库才能使用提供的示例。
演示1. 基本模式输出
对于第一个程序示例,我们将解析传感器报告的一般信息。这将代表该产品的主要功能信息输出。例如,人体存在、运动、距离等数据。
#if defined(ARDUINO_SEEED_XIAO_NRF52840_SENSE) || defined(ARDUINO_SEEED_XIAO_NRF52840)
#error "XIAO nRF52840 please use the non-mbed-enable version."
#endif
#include <SoftwareSerial.h>
#include <mmwave_for_xiao.h>
// Define the SoftwareSerial object, D2 as RX, D3 as TX, connect to the serial port of the mmwave sensor
SoftwareSerial COMSerial(D2, D3);
// Creates a global Serial object for printing debugging information
#define ShowSerial Serial
// Initialising the radar configuration
// Seeed_HSP24 xiao_config(COMSerial, ShowSerial);
Seeed_HSP24 xiao_config(COMSerial);
Seeed_HSP24::RadarStatus radarStatus;
void setup() {
COMSerial.begin(9600);
ShowSerial.begin(9600);
delay(500);
ShowSerial.println("Programme Starting!");
xiao_config.disableEngineeringModel();
}
void loop() {
int retryCount = 0;
const int MAX_RETRIES = 10; // Maximum number of retries to prevent infinite loops
//Get radar status
do {
radarStatus = xiao_config.getStatus();
retryCount++;
} while (radarStatus.targetStatus == Seeed_HSP24::TargetStatus::ErrorFrame && retryCount < MAX_RETRIES);
//Parses radar status and prints results from debug serial port
if (radarStatus.targetStatus != Seeed_HSP24::TargetStatus::ErrorFrame) {
ShowSerial.print("Status: " + String(targetStatusToString(radarStatus.targetStatus)) + " ---- ");
ShowSerial.println("Distance: " + String(radarStatus.distance) + " Mode: " + String(radarStatus.radarMode));
}
delay(200);
}
// Parsing the acquired radar status
const char* targetStatusToString(Seeed_HSP24::TargetStatus status) {
switch (status) {
case Seeed_HSP24::TargetStatus::NoTarget:
return "NoTarget";
case Seeed_HSP24::TargetStatus::MovingTarget:
return "MovingTarget";
case Seeed_HSP24::TargetStatus::StaticTarget:
return "StaticTarget";
case Seeed_HSP24::TargetStatus::BothTargets:
return "BothTargets";
default:
return "Unknown";
}
}
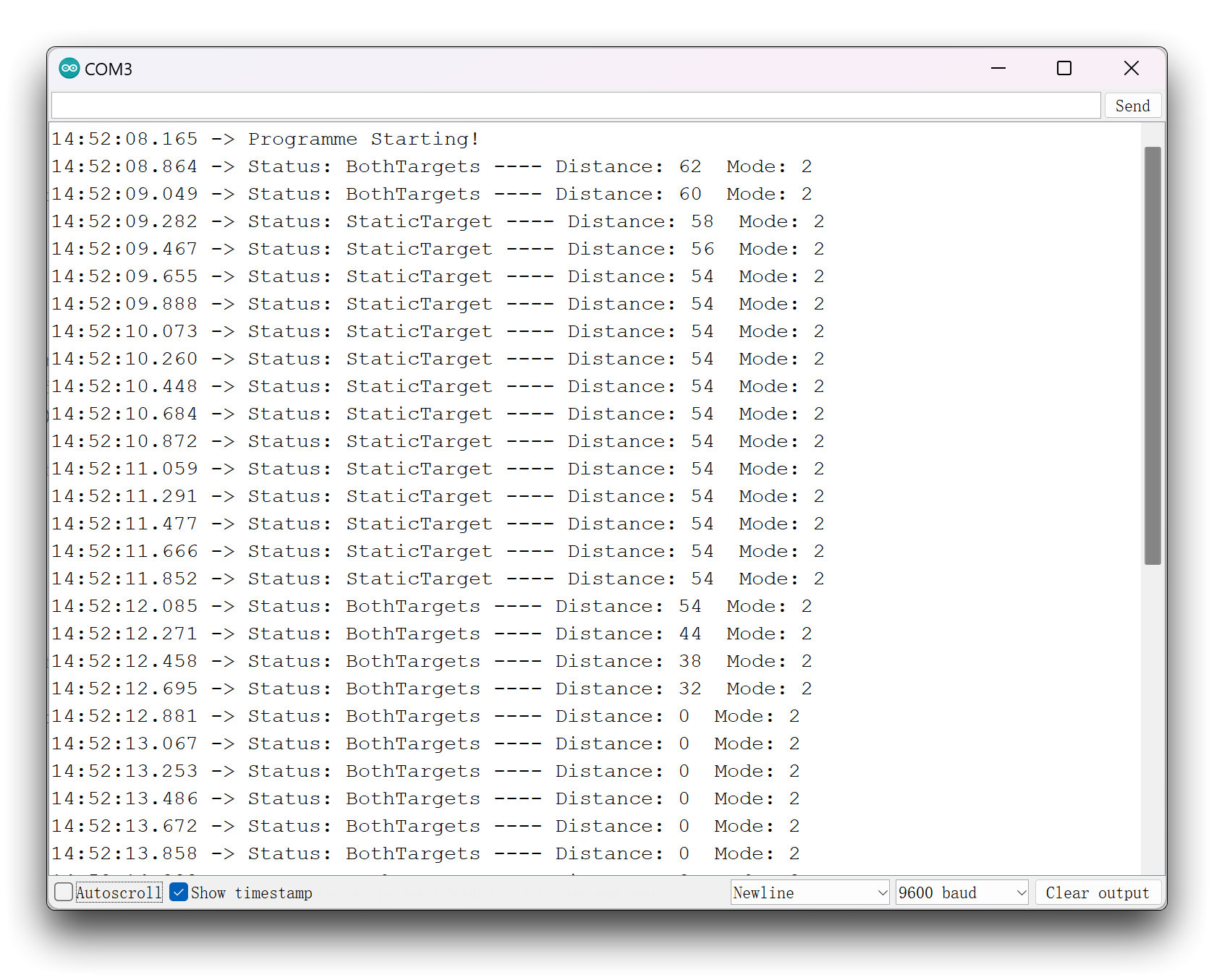
编译并上传程序后,打开串口监视器并将波特率设置为9600。如果一切顺利,您应该看到以下结果输出。
示例 2. 工程模式输出
对于第二个示例程序,我们将开启传感器的工程数据上传并解析这些工程信息。与基础模式相比,工程信息包含了不同距离门的更多运动能量值和静态能量值。这些值的显示让您能够可视化当前环境中的动态和静态能量变化,使您更容易根据实际情况调整传感器的触发器,以确定是否有人存在、静止或运动。
#if defined(ARDUINO_SEEED_XIAO_NRF52840_SENSE) || defined(ARDUINO_SEEED_XIAO_NRF52840)
#error "XIAO nRF52840 please use the non-mbed-enable version."
#endif
#include <SoftwareSerial.h>
#include <mmwave_for_xiao.h>
// Define the SoftwareSerial object, D2 as RX, D3 as TX, connect to the serial port of the mmwave sensor
SoftwareSerial COMSerial(D2, D3);
// Creates a global Serial object for printing debugging information
#define ShowSerial Serial
// Initialising the radar configuration
// Seeed_HSP24 xiao_config(COMSerial, ShowSerial);
Seeed_HSP24 xiao_config(COMSerial);
Seeed_HSP24::RadarStatus radarStatus;
void setup() {
COMSerial.begin(9600);
ShowSerial.begin(9600);
delay(500);
ShowSerial.println("Programme Starting!");
xiao_config.enableEngineeringModel();
}
void loop() {
int retryCount = 0;
const int MAX_RETRIES = 10; // Maximum number of retries to prevent infinite loops
//Get radar status
do {
radarStatus = xiao_config.getStatus();
retryCount++;
} while (radarStatus.targetStatus == Seeed_HSP24::TargetStatus::ErrorFrame && retryCount < MAX_RETRIES);
//Parses radar status and prints results from debug serial port
if (radarStatus.targetStatus != Seeed_HSP24::TargetStatus::ErrorFrame) {
ShowSerial.print("Status: " + String(targetStatusToString(radarStatus.targetStatus)) + " ---- ");
ShowSerial.println("Distance: " + String(radarStatus.distance) + " Mode: " + String(radarStatus.radarMode));
if (radarStatus.radarMode == 1) {
ShowSerial.print("Move:");
for (int i = 0; i < 9; i++) {
ShowSerial.print(" " + String(radarStatus.radarMovePower.moveGate[i]) + ",");
}
ShowSerial.println("");
ShowSerial.print("Static:");
for (int i = 0; i < 9; i++) {
ShowSerial.print(" " + String(radarStatus.radarStaticPower.staticGate[i]) + ",");
}
ShowSerial.println("");
ShowSerial.println("Photosensitive: " + String(radarStatus.photosensitive));
}
}
delay(100);
}
// Parsing the acquired radar status
const char* targetStatusToString(Seeed_HSP24::TargetStatus status) {
switch (status) {
case Seeed_HSP24::TargetStatus::NoTarget:
return "NoTarget";
case Seeed_HSP24::TargetStatus::MovingTarget:
return "MovingTarget";
case Seeed_HSP24::TargetStatus::StaticTarget:
return "StaticTarget";
case Seeed_HSP24::TargetStatus::BothTargets:
return "BothTargets";
default:
return "Unknown";
}
}
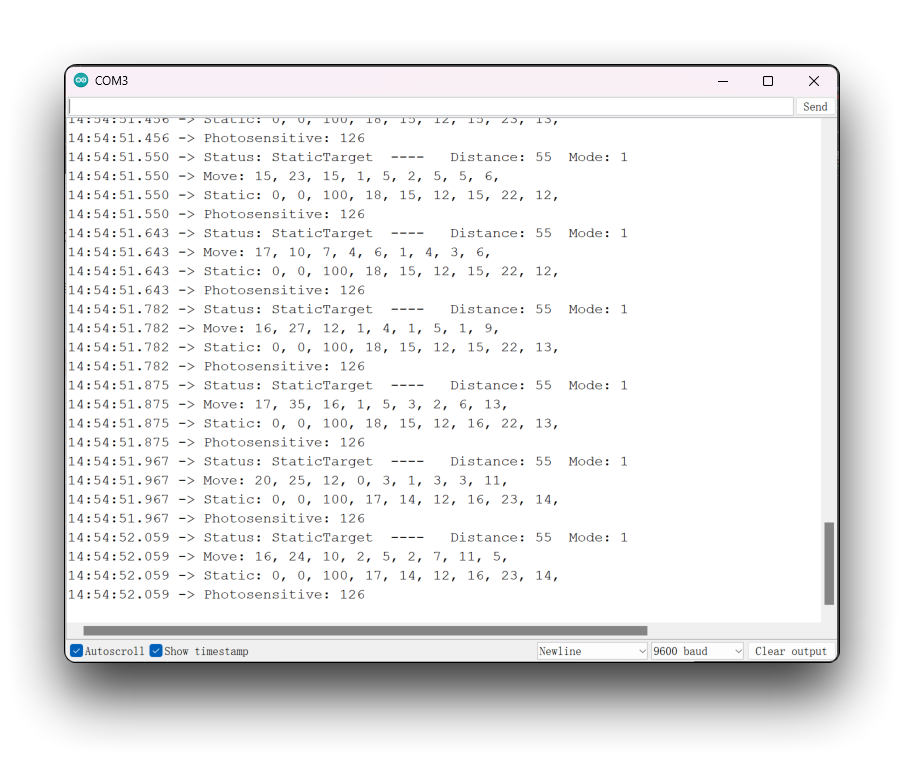
编译并上传程序后,打开串口监视器并将波特率设置为9600。如果一切顺利,您应该看到以下结果输出。
演示3. 其他配置查询和恢复出厂设置
在第三个示例中,我们提供了恢复传感器设置的方法以及参数查询功能使用的其他一些示例。
需要特别注意的是,当传感器恢复到出厂设置时,这也意味着传感器的波特率将恢复到256000。您需要按照之前的步骤在手机APP上将波特率重新设置为9600,然后才能使用其他XIAO程序。
#if defined(ARDUINO_SEEED_XIAO_NRF52840_SENSE) || defined(ARDUINO_SEEED_XIAO_NRF52840)
#error "XIAO nRF52840 please use the non-mbed-enable version."
#endif
#include <SoftwareSerial.h>
#include <mmwave_for_xiao.h>
// Define the SoftwareSerial object, D2 as RX, D3 as TX, connect to the serial port of the mmwave sensor
SoftwareSerial COMSerial(D2, D3);
// Creates a global Serial object for printing debugging information
#define ShowSerial Serial
// Initialising the radar configuration
// Seeed_HSP24 xiao_config(COMSerial, ShowSerial);
Seeed_HSP24 xiao_config(COMSerial);
Seeed_HSP24::RadarStatus radarStatus;
void setup() {
COMSerial.begin(9600);
ShowSerial.begin(9600);
while(!ShowSerial); // Turn on the serial monitor and start executing
delay(500);
ShowSerial.println("Programme Starting!");
ShowSerial.print("Sensor Software Version: ");
ShowSerial.println(xiao_config.getVersion());
radarStatus = xiao_config.getConfig();
if (radarStatus.detectionDistance != -1) {
ShowSerial.println("Detection Distance: " + String(radarStatus.detectionDistance) + " m ");
ShowSerial.println("Moveing Set Distance: " + String(radarStatus.moveSetDistance) + " m ");
ShowSerial.println("Static Set Distance: " + String(radarStatus.staticSetDistance) + " m ");
ShowSerial.println("No Target Duration Time: " + String(radarStatus.noTargrtduration) + " seconds ");
}
else ShowSerial.println("Failed to get configuration information, please retry.");
/*** Restore or reset the radar settings, please operate with caution.
* * After restoring or resetting the factory settings, please re-modify
* * the baud rate to 9600 before using XIAO!
* */
xiao_config.refactoryRadar();
// xiao_config.rebootRadar(); // Reboot the Sensor
}
void loop() {}
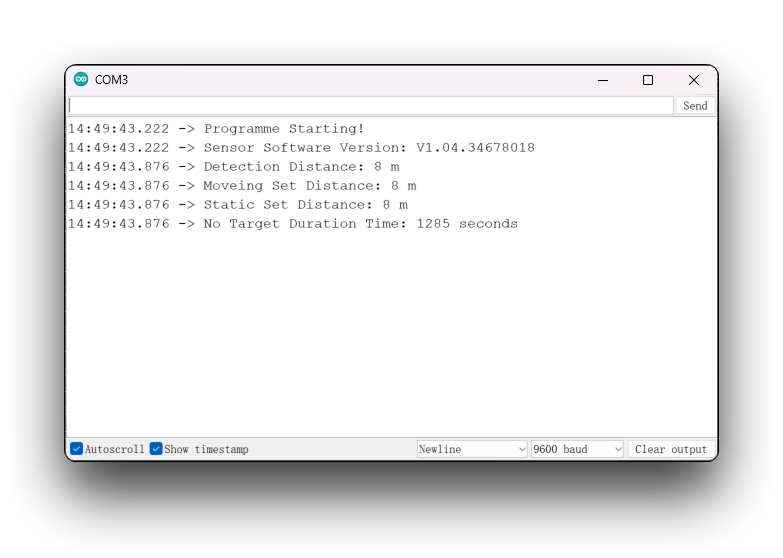
该程序在您打开串口监视器后会执行重置。
故障排除
Q1: 我正在使用 XIAO nRF52840 (Sense),应该选择哪个开发板版本?
您应该使用 XIAO nRF52840 开发板包的非 mbed 版本,因为它包含程序所需的软串口库。
Q2: 为什么我会遇到丢帧和传感器数据流乱码的问题?
这很可能是因为您没有修改传感器的波特率。本产品出厂固件的默认波特率为 256000。XIAO 的软串口可能无法处理如此高速的数据流,然后程序可能会异常卡住并无法正确解析数据帧,因此请将波特率调低后再使用程序。我们建议使用 9600 的波特率。
Q3: 为什么使用 Demo2 时数据流会延迟 1~2 秒?
这可能是正常现象,工程模式下的数据流量很大,软串口占用 CPU 处理数据的能力有限,所以会时不时地暂停一会儿。
技术支持与产品讨论
感谢您选择我们的产品!我们在这里为您提供不同的支持,以确保您使用我们产品的体验尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。