Orbbec Gemini2 3D 相机入门指南

紧凑型 Gemini 2 3D 相机基于主动立体红外技术,配备 Orbbec 最新的定制 ASIC 芯片,用于高质量深度处理、IMU 和单线 USB 3.0 供电+连接。宽视场角和宽深度感知范围使 Gemini 2 适用于许多应用,特别是机器人技术。它易于设置和操作,配合 Orbbec SDK 使用,在从完全黑暗到半户外的各种光照条件下都能提供极其准确和可靠的数据。
特性
- 主动立体红外 采用主动立体红外技术进行深度输出,在各种光照条件下实现准确可靠的数据输出
- 宽感知范围 提供从 0.15m 到 10m 的高质量深度数据输出
- 宽视场角 提供 91 度水平和 66 度垂直的宽视场角数据
- 多相机同步 支持深度图像和 RGB 图像的多相机同步
- USB 连接 使用单根 USB 3.0 Type-C 线缆进行供电和连接
规格参数
| 参数 | 详细信息 |
| 电压 | 5V (USB Type-C) |
| 深度技术 | 主动立体红外 |
| 工作温度 | 0°C ~ 40°C |
| 机械尺寸 | 90mm x 25mm x 30mm |
| 通信接口 | USB 3.0 Type-C |
| 相机驱动 | UVC |
| 深度范围 | 0.15m ~ 10m |
| 理想范围 | 0.2m ~ 5m |
| 深度分辨率 | 最高 1280x800 @ 30fps |
| RGB 分辨率 | 最高 1920x1080 @ 30fps |
| 水平视场角 | 91° |
| 垂直视场角 | 66° |
硬件概述



快速上手使用
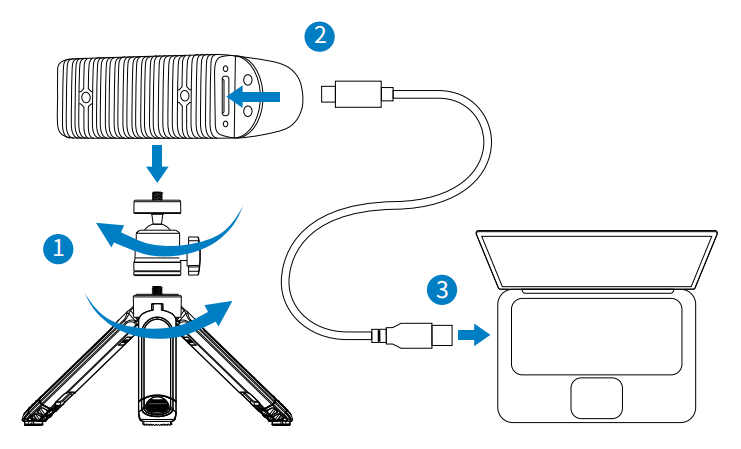
- 通过USB-C连接ORBBEC相机与你的电脑
① 组装三脚架云台和三脚架,并将相机固定在组装好的三脚架上,如下面的步骤1所示。
② 使用 USB-C to USB-A 数据线连接相机的Type-c连接器,如下面的步骤2所示。
③ 使用 USB-C to USB-A 数据线将USB-A连接器连接到主机,如下面的步骤3所示。
-
根据您的系统和版本选择并下载相应的Orbbec Viewer工具。
-
启动ORBBEC VIEWER
- 启动Orbbec Viewer后,请确保该工具能够识别3D相机,如下图所示。
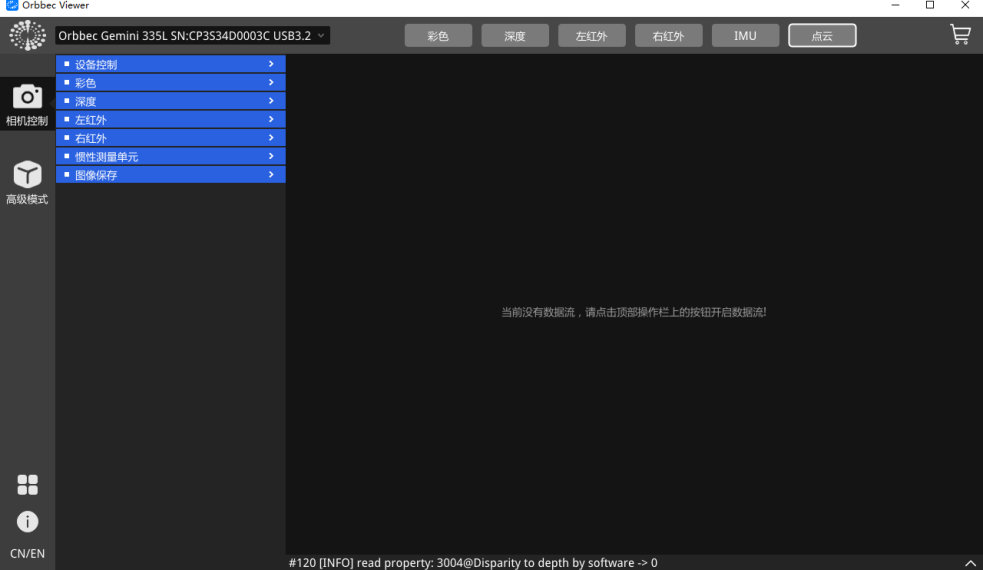
如果相机无法识别,首先要检查相机和主机是否正确连接。您可以尝试断开USB电缆,然后重新连接。如果仍然无法识别,请考虑更换USB电缆或确认主机的电源是否符合要求的规格。
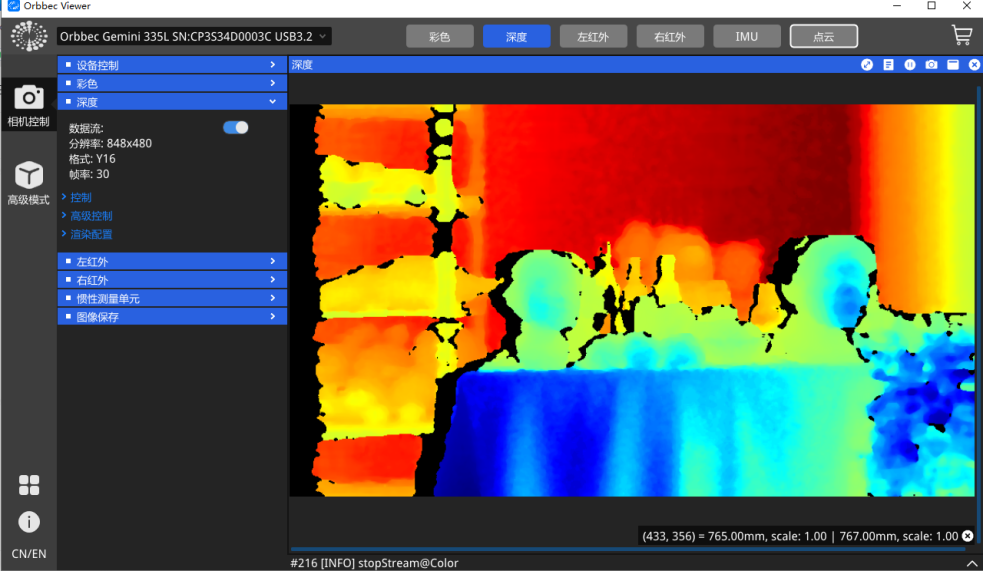
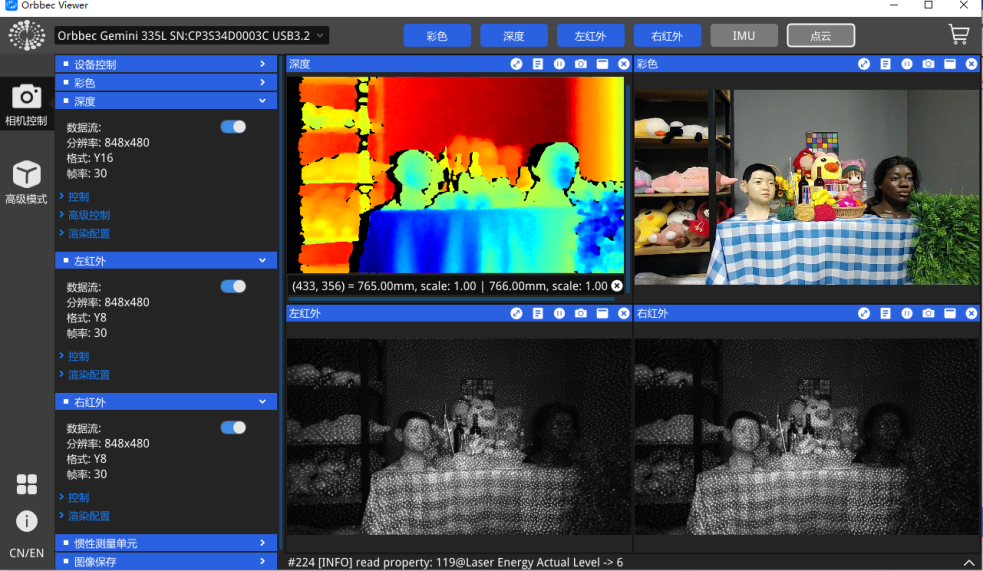
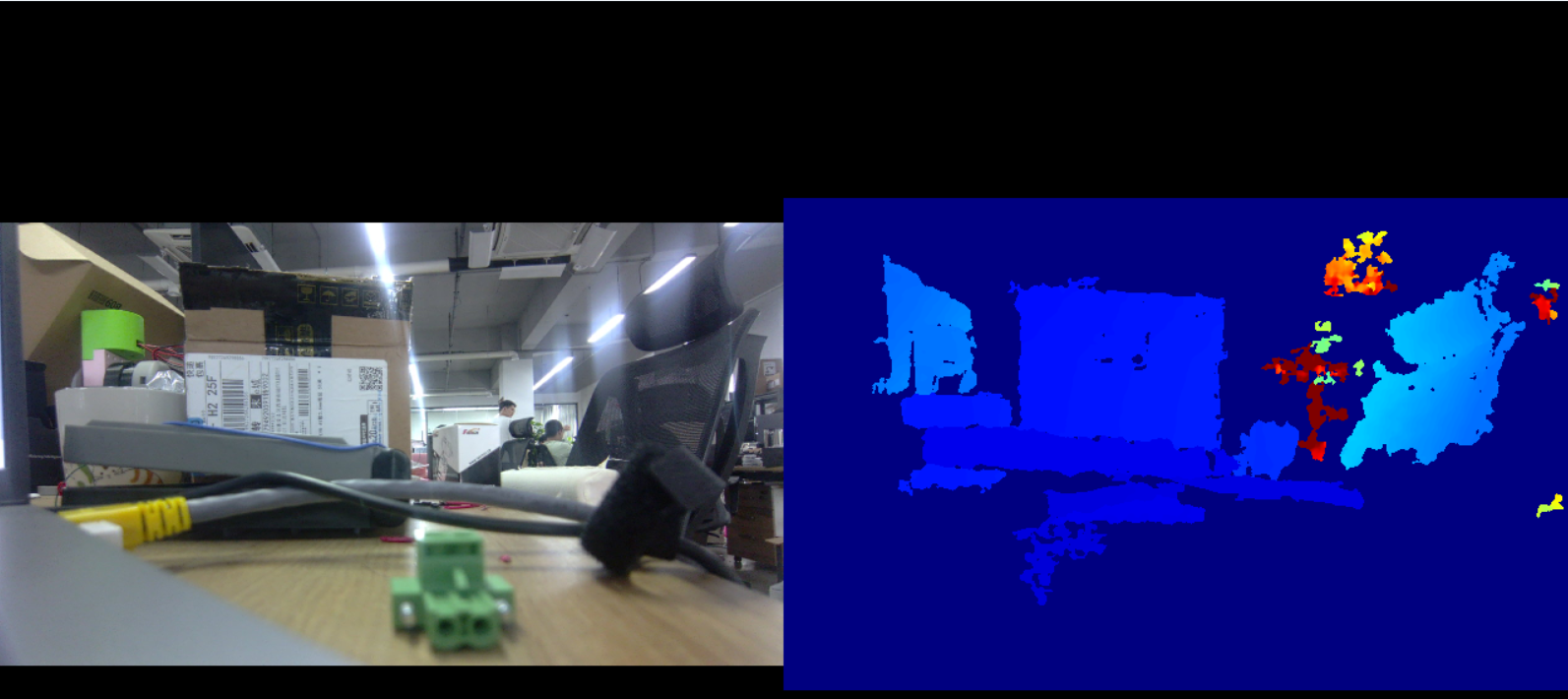
2.点击工具顶部的深度按钮后,启动深度相机并可预览深度图
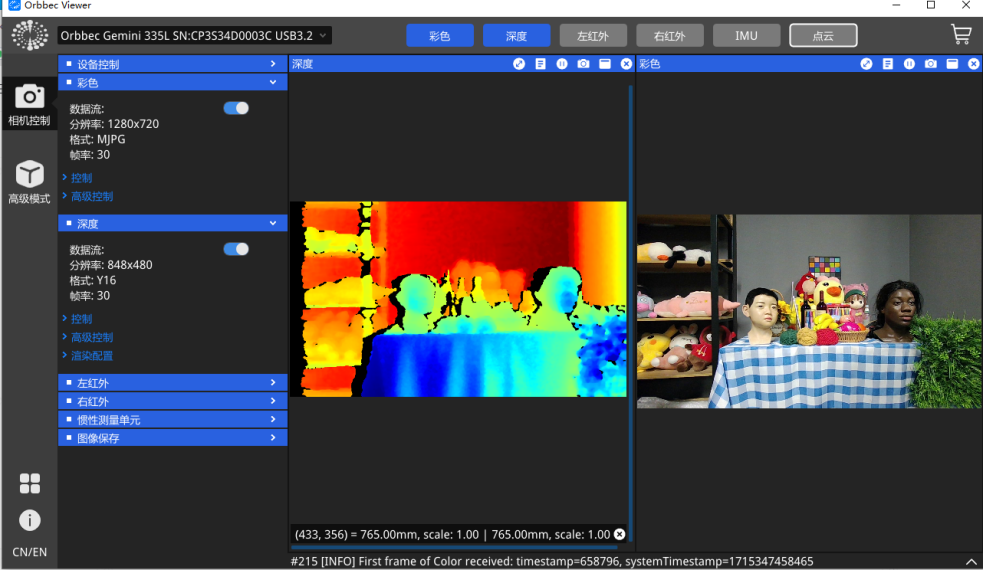
- 点击彩色按钮后启动彩色相机并可预览彩色图
- 点击左红外和右红外按钮后将启动左右红外相机并可预览左右红外相机的IR图
- 点击IMU按钮后将启动IMU数据流
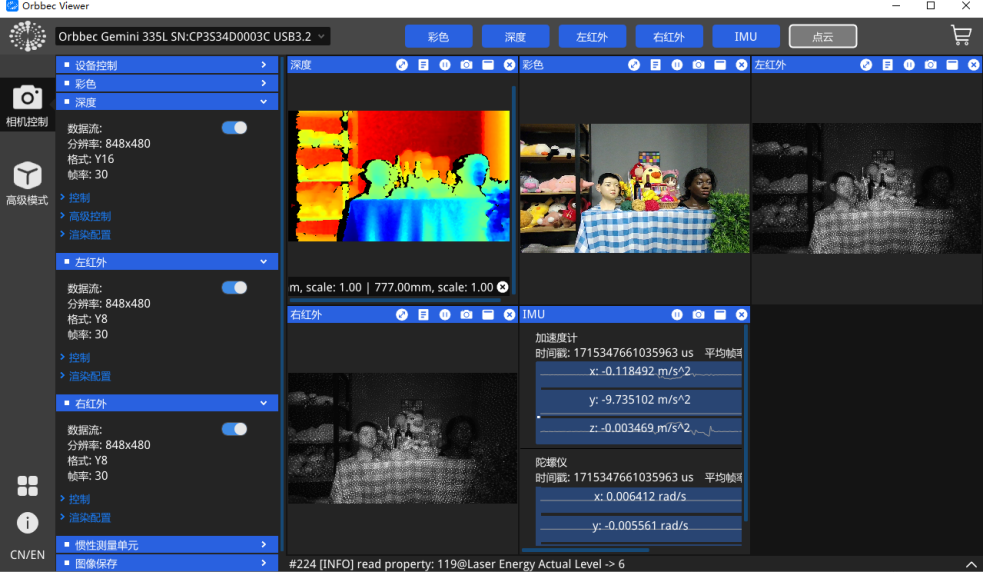
- 点击每个窗口顶部的image.png按钮可显示元数据信息,再按一次即可隐藏元数据信息。

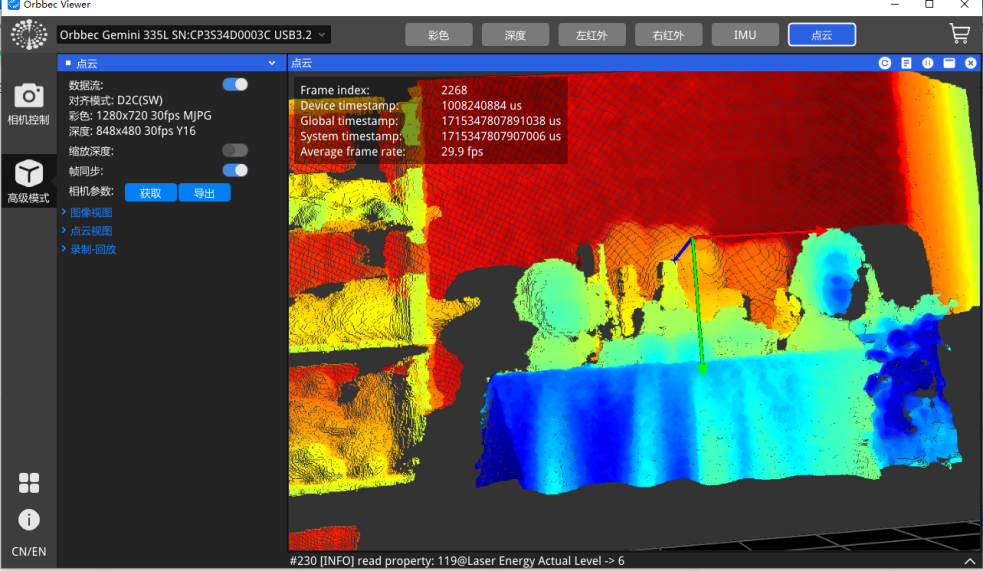
- 点击点云按钮后将启动和预览3D点云
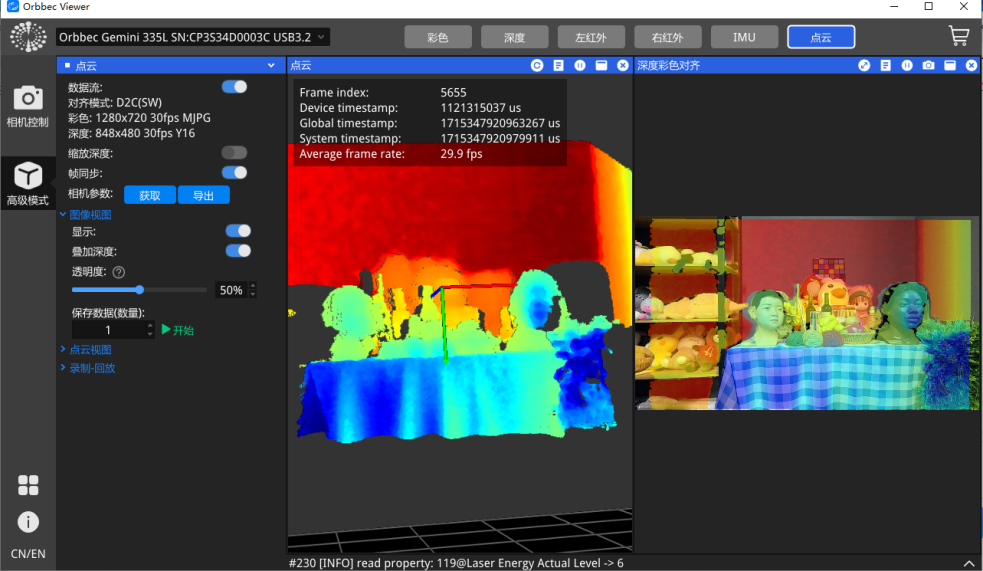
- 点击左侧 “图像视图” 菜单下的 “显示” 按钮可启动和预览D2C (深度对齐到彩色图像) 。
在 reComputer 上开始使用
步骤 1. 下载并安装适用于 ARM64 架构的 Orbbec SDK:
# Download Orbbec SDK
wget https://github.com/orbbec/OrbbecSDK_v2/releases/download/v2.4.11/OrbbecSDK_v2.4.11_202508040936_058db73_linux_aarch64.zip
# Unzip the SDK
unzip OrbbecSDK_v2.4.11_202508040936_058db73_linux_aarch64.zip
步骤 2. 构建示例并测试:
# Install udev rules
cd OrbbecSDK_v2.4.11_202508040936_058db73_linux_aarch64/shared/
sudo chmod +x ./install_udev_rules.sh
sudo ./install_udev_rules.sh
sudo udevadm control --reload-rules && sudo udevadm trigger
# Build examples and setup
cd ..
./build_examples.sh
./setup.sh
应用示例
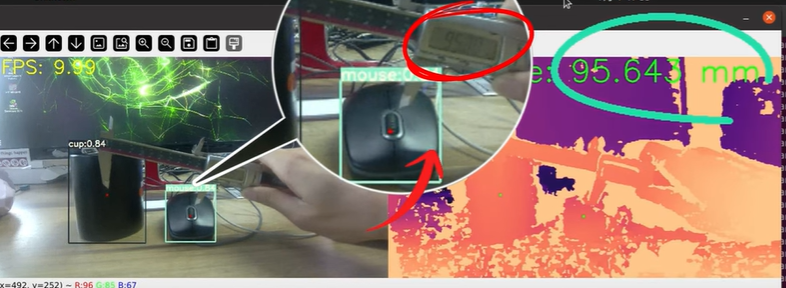
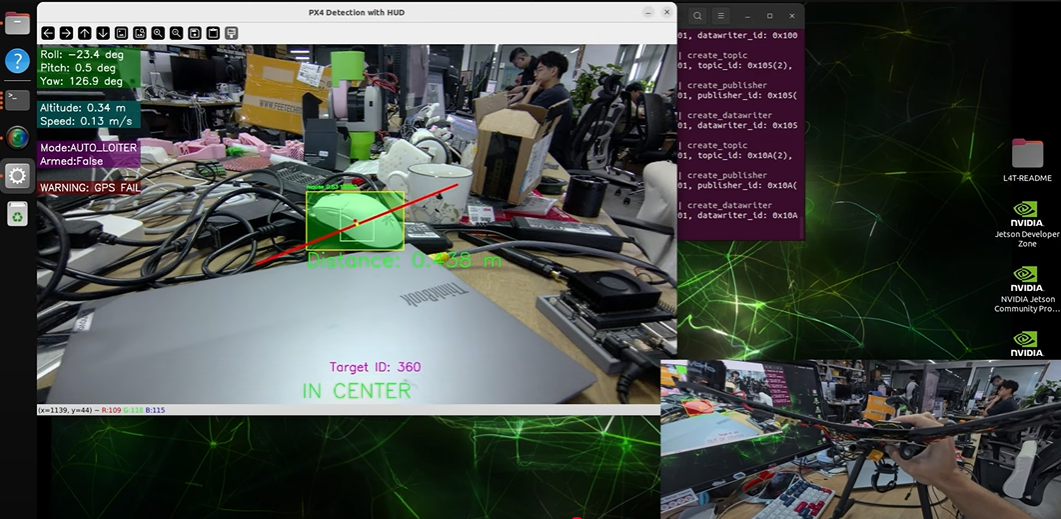
Orbbec Gemini2 是一款紧凑、高性能的深度相机,非常适合机器人技术、3D 视觉、物体跟踪和工业自动化。 它完美适用于嵌入式 AI 和边缘计算应用,如 NVIDIA Jetson 平台上的应用。
资源
技术支持与产品讨论
感谢您选择我们的产品!我们在这里为您提供不同的支持,以确保您使用我们产品的体验尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。