Orbbec Gemini 335Lg 立体相机

Gemini 335Lg 是 Gemini 330 系列中的杰出型号,作为业界验证的 Gemini 335L 的 GMSL2/FAKRA 版本。
GMSL2 串行器结合 FAKRA 连接器确保了在复杂环境中导航的自主移动机器人(AMR)和需要灵活布线的机械臂的安全可靠连接。
规格参数
| 类别 | 规格 | Gemini 335Lg |
|---|---|---|
| 基础 | 使用环境 | 室内与室外 |
| 技术类型 | 主/被动双目 | |
| 双目基线 | 95mm | |
| 数据连接 | GMSL2 FAKRA 与 USB 3 | |
| 相机协议 | USB 与 GMSL 2 | |
| 是否符合 UVC | 是 | |
| SDK | Orbbec SDK | |
| 深度 | 深度范围 [1] | 0.17m - 20m+ |
| 理想范围 | 0.25m - 6m | |
| 深度分辨率 / 帧率 | Up to: 1280 × 800 @ 30fps; 848 × 480 @ 60fps | |
| 深度视场 (H × V) | 90° × 65° ± 3° @ 2m | |
| D2C 时的深度视场 (H × V) | Up to: 90° × 65° ± 3° @ 2m | |
| 空间精度 [2] | ≤0.8% @ 2m; ≤1.6% @ 4m | |
| 深度传感器技术 | 全球快门 | |
| 深度滤光片 | 可见光 + NIR 通行 | |
| 红外(IR) | IR 分辨率 / 帧率 | Up to: 1280 × 800 @ 30fps; 848 × 480 @ 60fps |
| IR 视场 (H × V) | 91° × 65° ± 3° | |
| RGB | RGB 分辨率 / 帧率 | Up to 1280 × 800 @ 60 FPS; 1280 × 720 @ 60 FPS |
| RGB 视场 (H × V) | 94° × 68° ± 3° | |
| RGB 传感器技术 | 全球快门 | |
| 内置传感器 | IMU | 支持 |
| 电气特性 | 功耗 | GMSL2: Average ≤ 3.8 W (Peak ≤ 7.5W); USB3: Average ≤ 3.0 W (Peak ≤ 6W) |
| 供电 | GMSL2: For Best Performance, DC 12V/≥0.7A (Laser Energy Level 6); For Default Performance: DC 12V/≥0.5A [3] (Laser Energy Level 4); USB 3: DC 5V/≥1.5A | |
| 物理特性 | 多机硬件同步 | 8-pin & FAKRA-Z |
| 尺寸(宽 × 高 × 厚) | 124 mm × 29mm × 36 mm | |
| 重量 | 164g ± 3g | |
| 防护等级 [4] | IP65 | |
| 安装方式 | Bottom: 1 × 1/4 - 20 UNC; BACK: 2 × M4 | |
| 环境 | 工作环境温度 | -10℃ - 50 ℃ @ 15 FPS; -10℃ - 45 ℃ @ 30/60 FPS |
| EMC 要求 | EN61000-6-2; EN610000-6-4 | |
| 振动 | 3.8Grms @ 5 ~ 500 Hz, random, 2hr/axis | |
| 其他 | 使用寿命 [5] | 5 years |
[1] 理论最大深度范围可达 65 米;
[2] 工厂校准期间测量的数据;
[3] Gemini 335Lg 默认激光能量级别设置为 4 级,以降低峰值功耗并防止操作故障。当有足够功率可用时,用户可以手动将激光调整到最大 6 级以获得最佳性能;
[4] Gemini 335L 和 335Lg 在通电操作期间都需要使用符合 IP65 标准的电缆才能实现 IP65 防护;
[5] 每天工作时间不超过 16 小时。
设置设备
在本教程中,我们演示 USB 3 和 GMSL2 连接。主机设备规格:
- 带 GMSL 的 reComputer Robotics J4012
- JetPack 6.2(Ubuntu 22.04)
有关 x86_64 Windows/Linux 或 MacOS(x86_64,可能包括 Apple Silicon)的教程,请参考 SDK 仓库 的 README
下载并安装 Orbbec Viewer
- 在您的 Jetson 设备上启动终端,从 GitHub 发布页面下载预构建包。
wget -L https://github.com/orbbec/OrbbecSDK_v2/releases/download/v2.4.8/OrbbecSDK_v2.4.8_arm64.deb
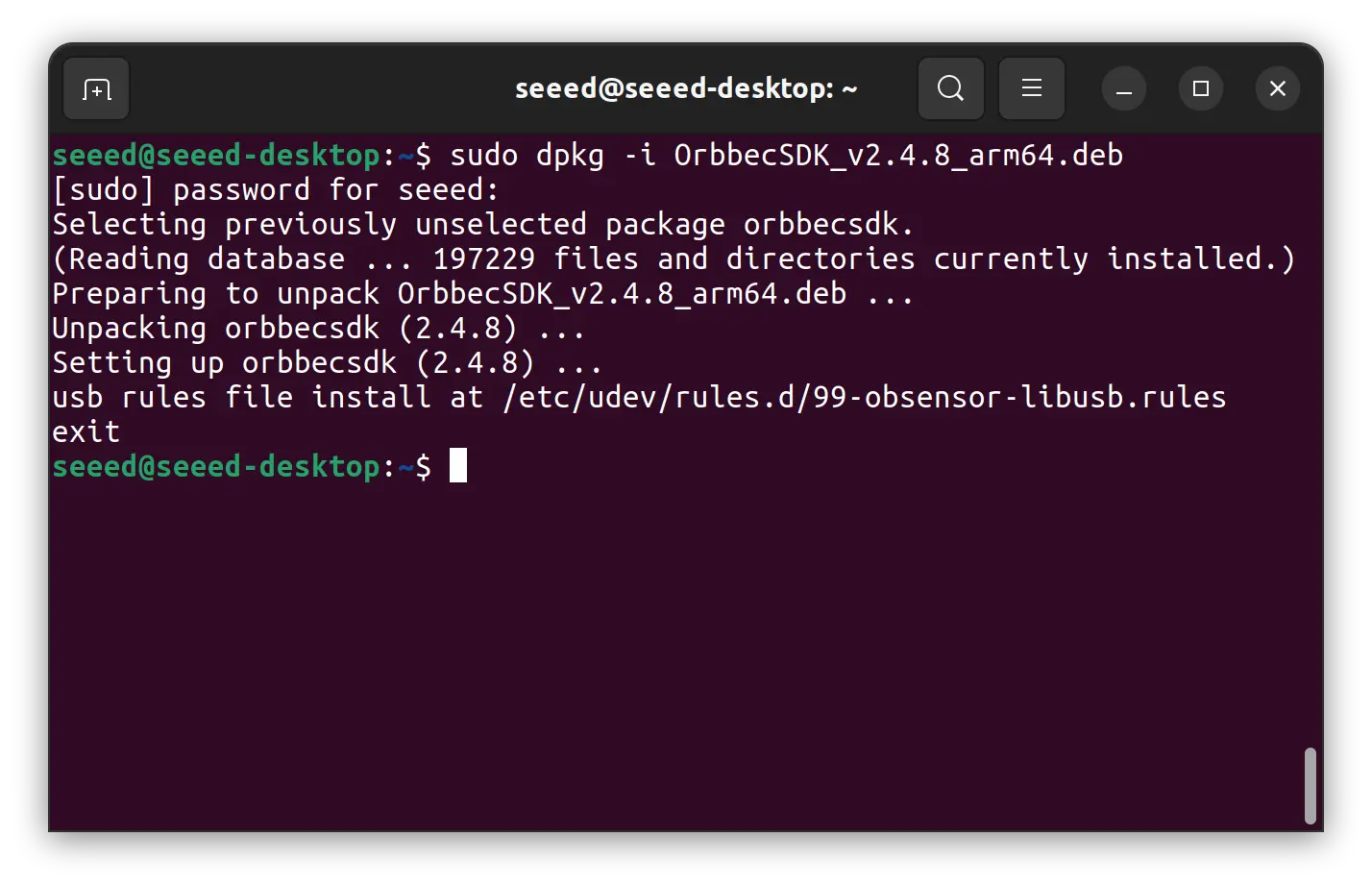
- 安装 SDK
sudo dpkg -i OrbbecSDK_v2.4.8_arm64.deb
- 使用 Orbbec Viewer 进行可视化,下载
wget -L https://github.com/orbbec/OrbbecSDK_v2/releases/download/v2.4.8/OrbbecViewer_v2.4.8_202507031357_a1355db_linux_aarch64.zip
- 解压内容
# In case you haven't install 'unzip'
# sudo apt-get update && sudo apt-get install unzip
unzip OrbbecViewer_v2.4.8_202507031357_a1355db_linux_aarch64.zip
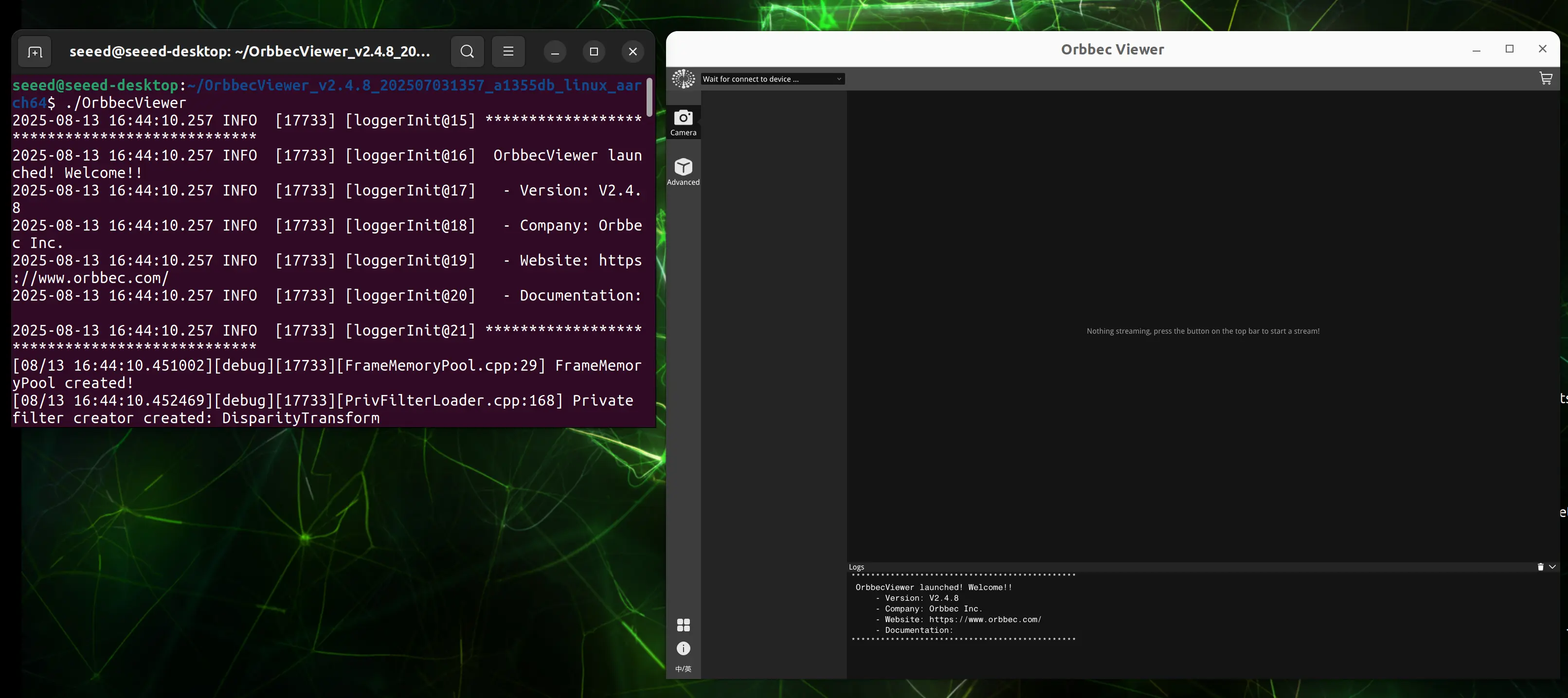
- 启动 Orbbec Viewer
cd OrbbecViewer_v2.4.8_202507031357_a1355db_linux_aarch64
./OrbbecViewer
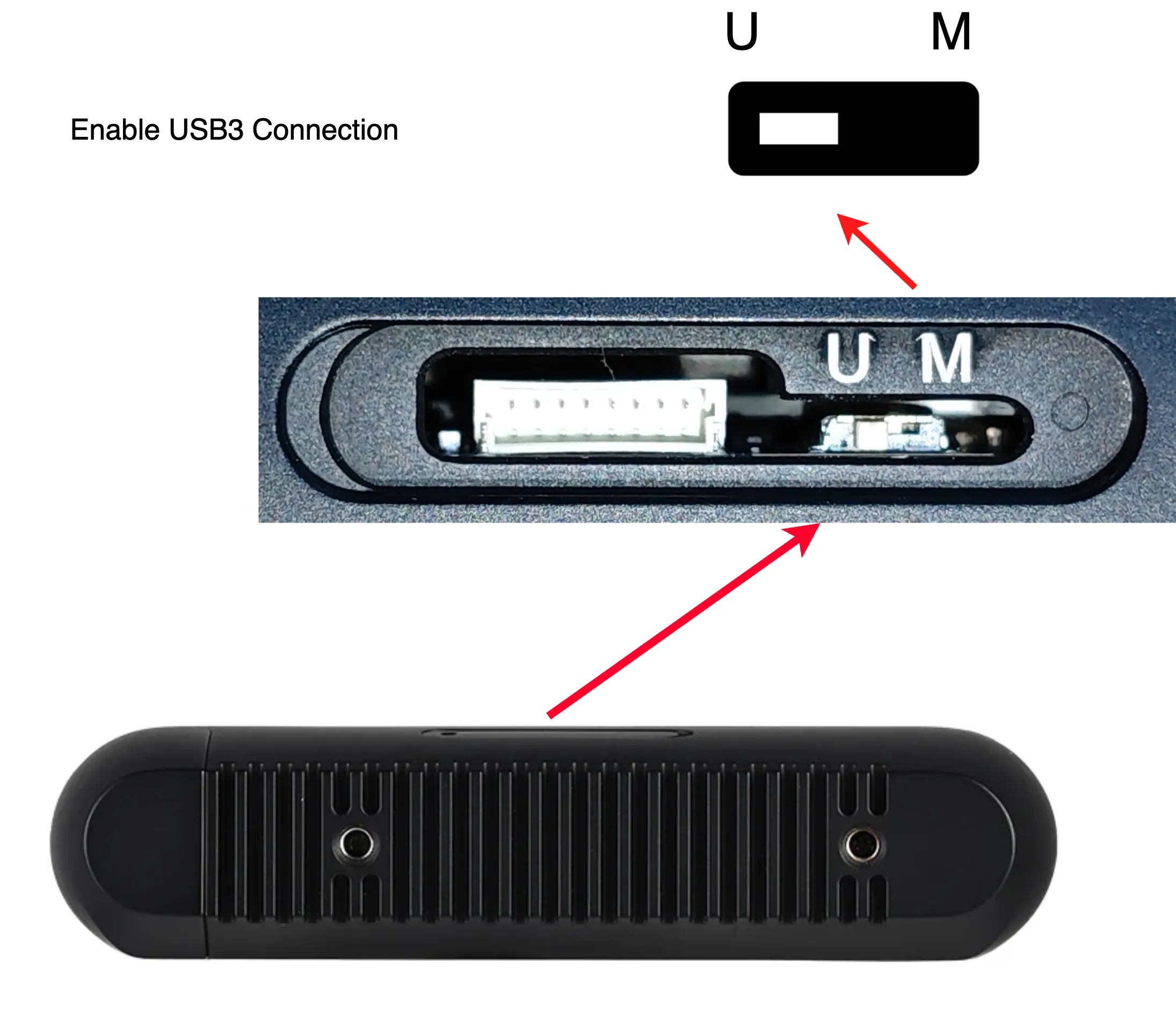
USB3 连接
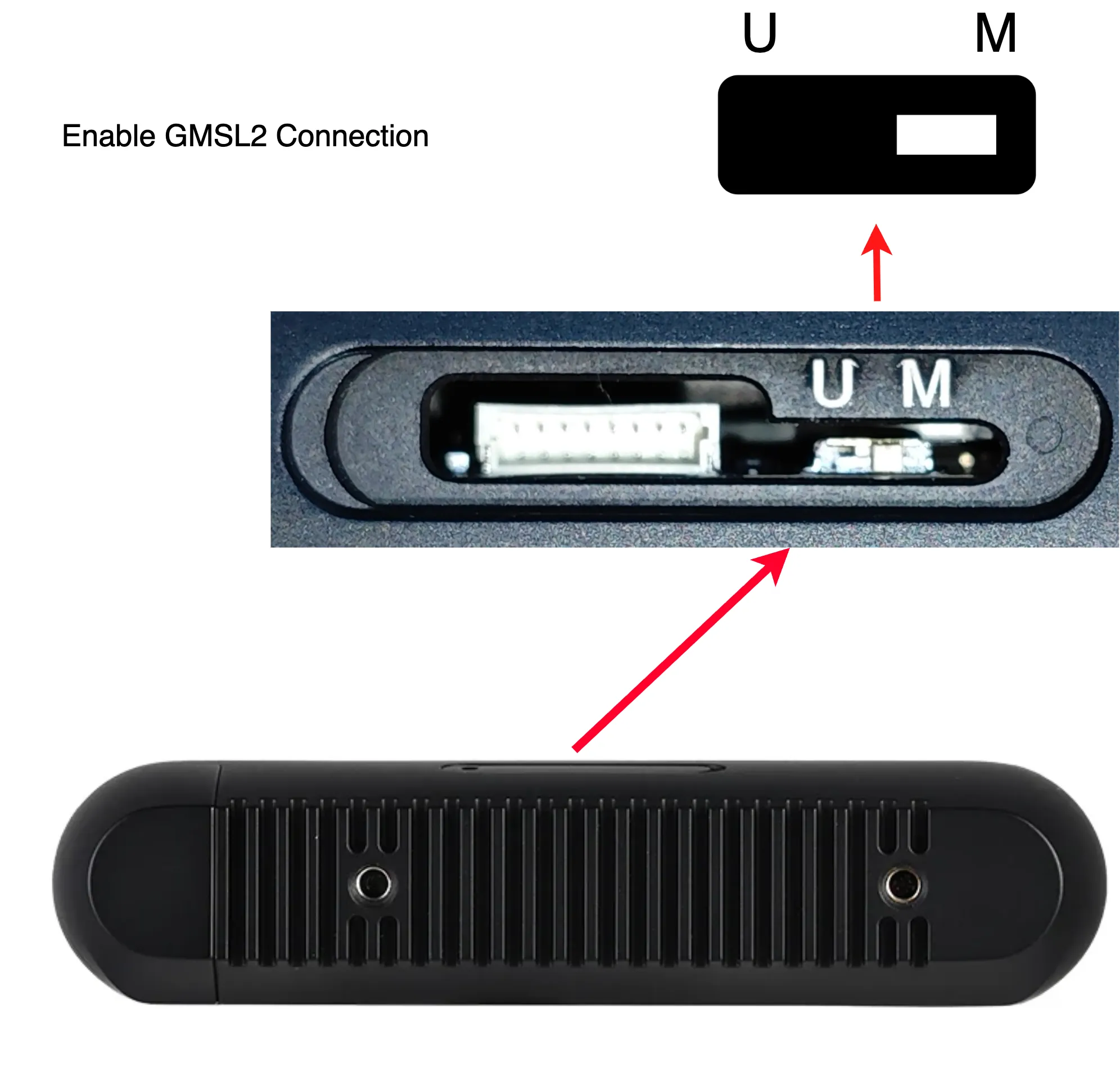
将相机顶部的 DIP 开关(先取下金属盖)设置到字母 'U' 位置。
您可能需要:
- 一根支持 USB 3 协议的 USB Type-C 到 USB Type A 电缆。
- 一台具有 USB 3 Type A 端口的主机 Jetson 设备。
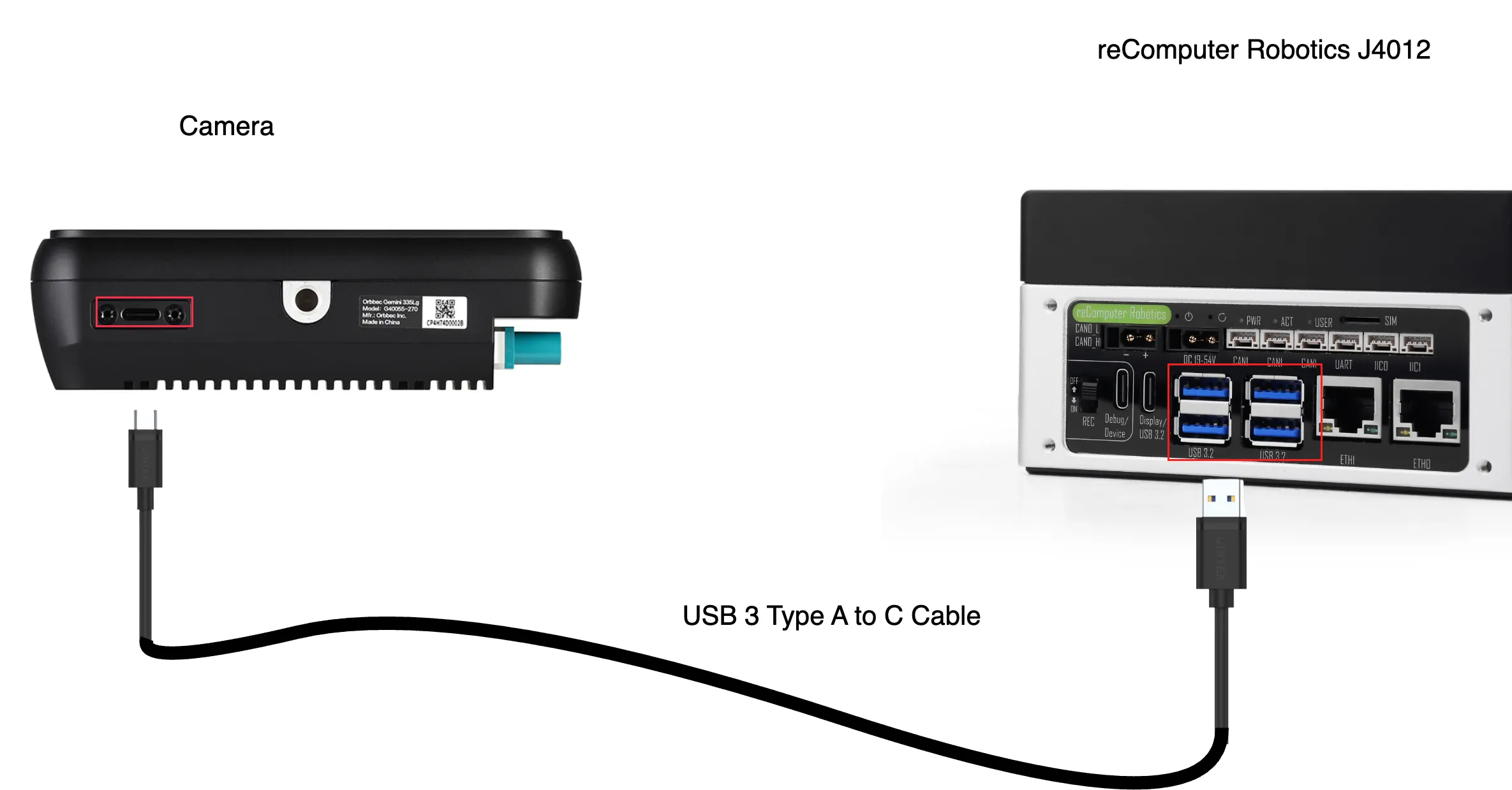
连接相机并使用 OrbbecViewer 进行可视化。
GMSL2 连接
将相机顶部的 DIP 开关(先取下金属盖)设置到字母 'M' 位置。
您可能需要:
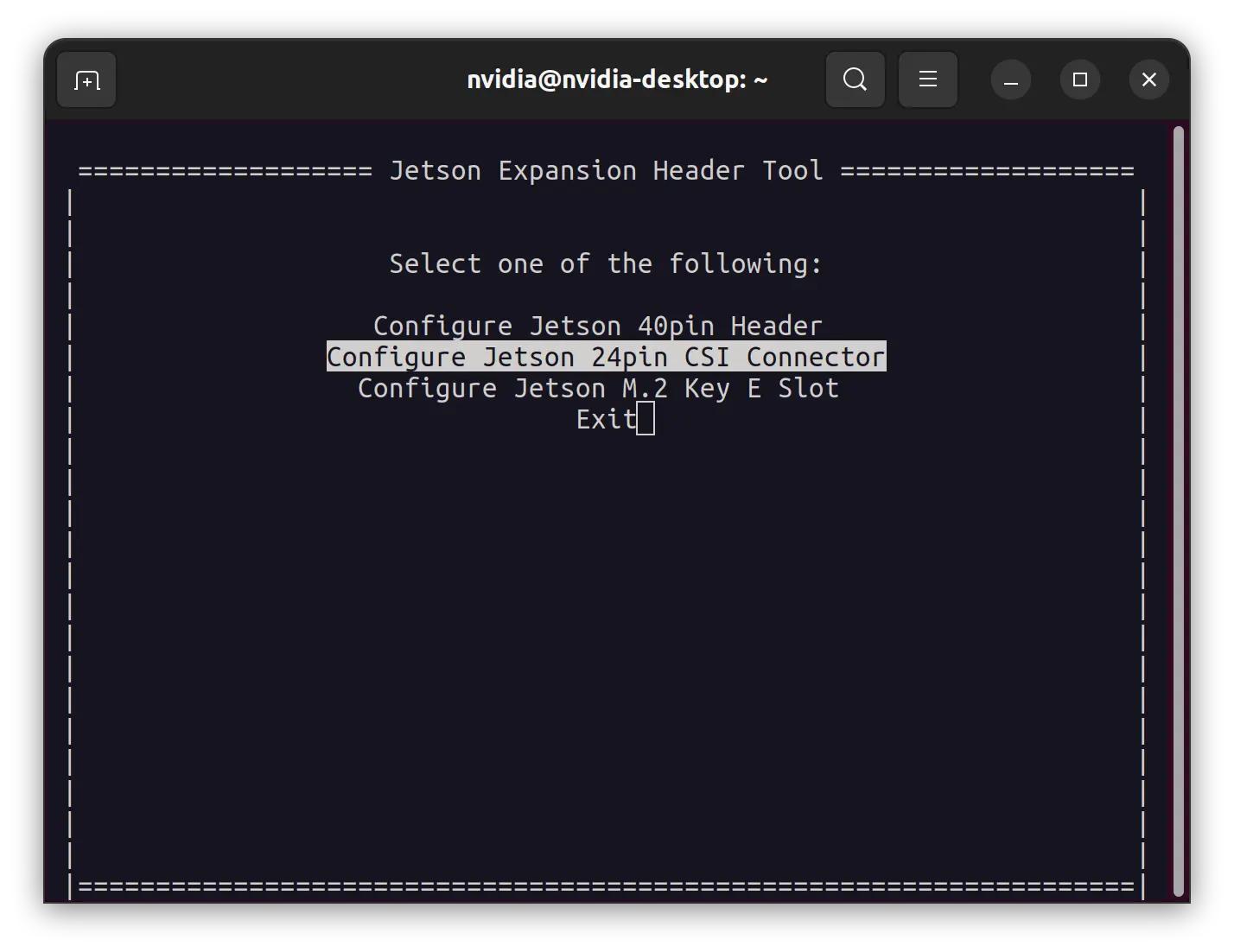
连接相机并在您的设备上启动 Jetson IO
sudo /opt/nvidia/jetson-io/jetson-io.py
并逐步配置设备树覆盖层:
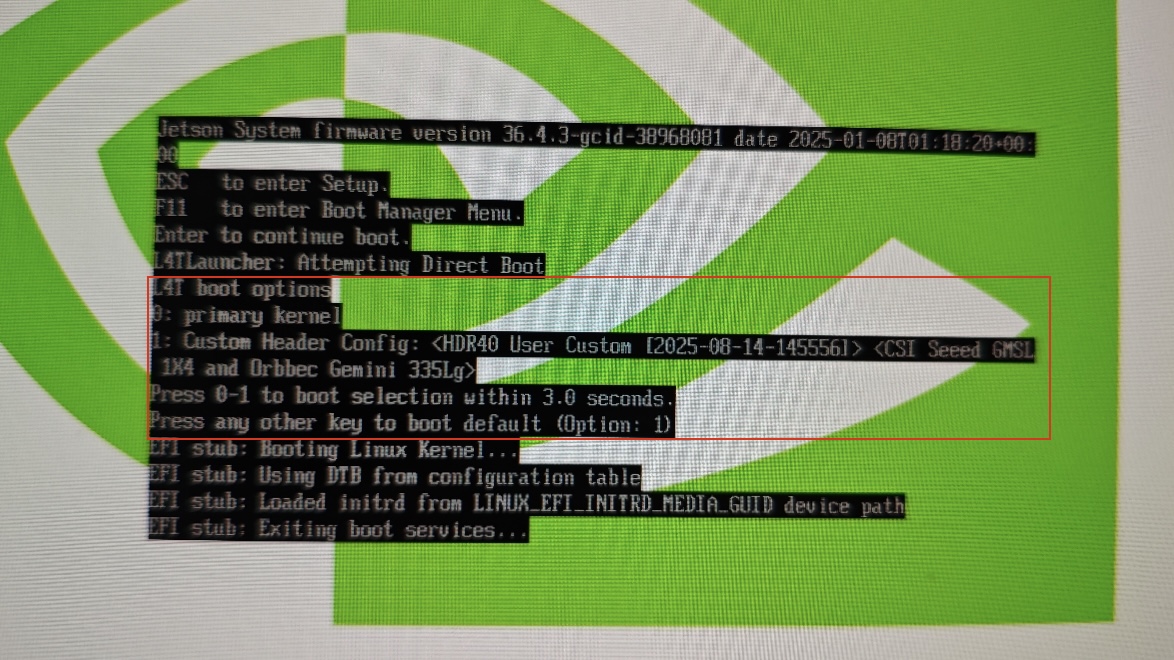
重启 Jetson 设备,在 Jetson 固件页面上,您可能需要根据提示选择正确的条目,在我们的情况下,我们按 '1' 来使用 Custom Header Config。
使用 Mini FAKRA 电缆连接相机。

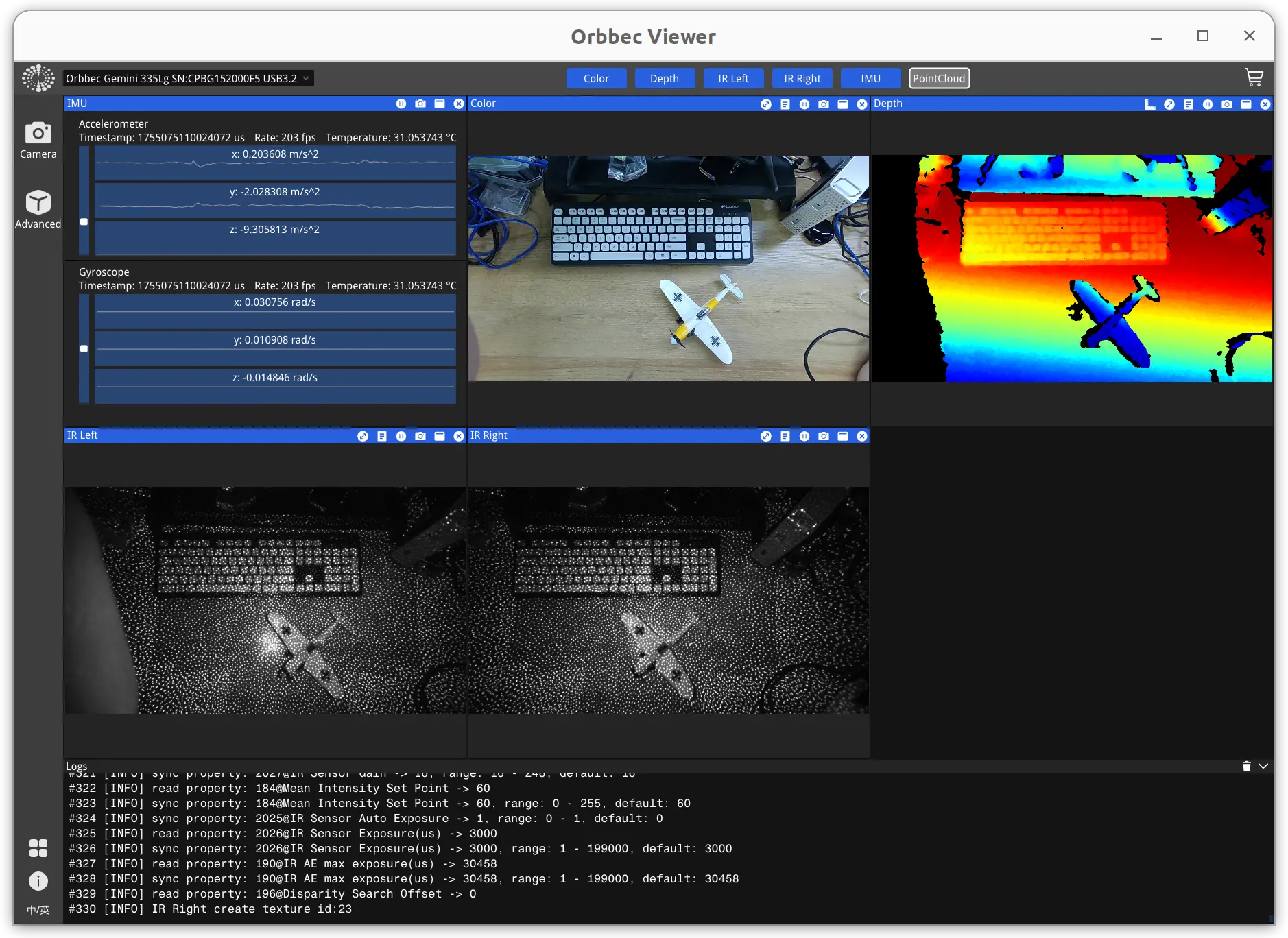
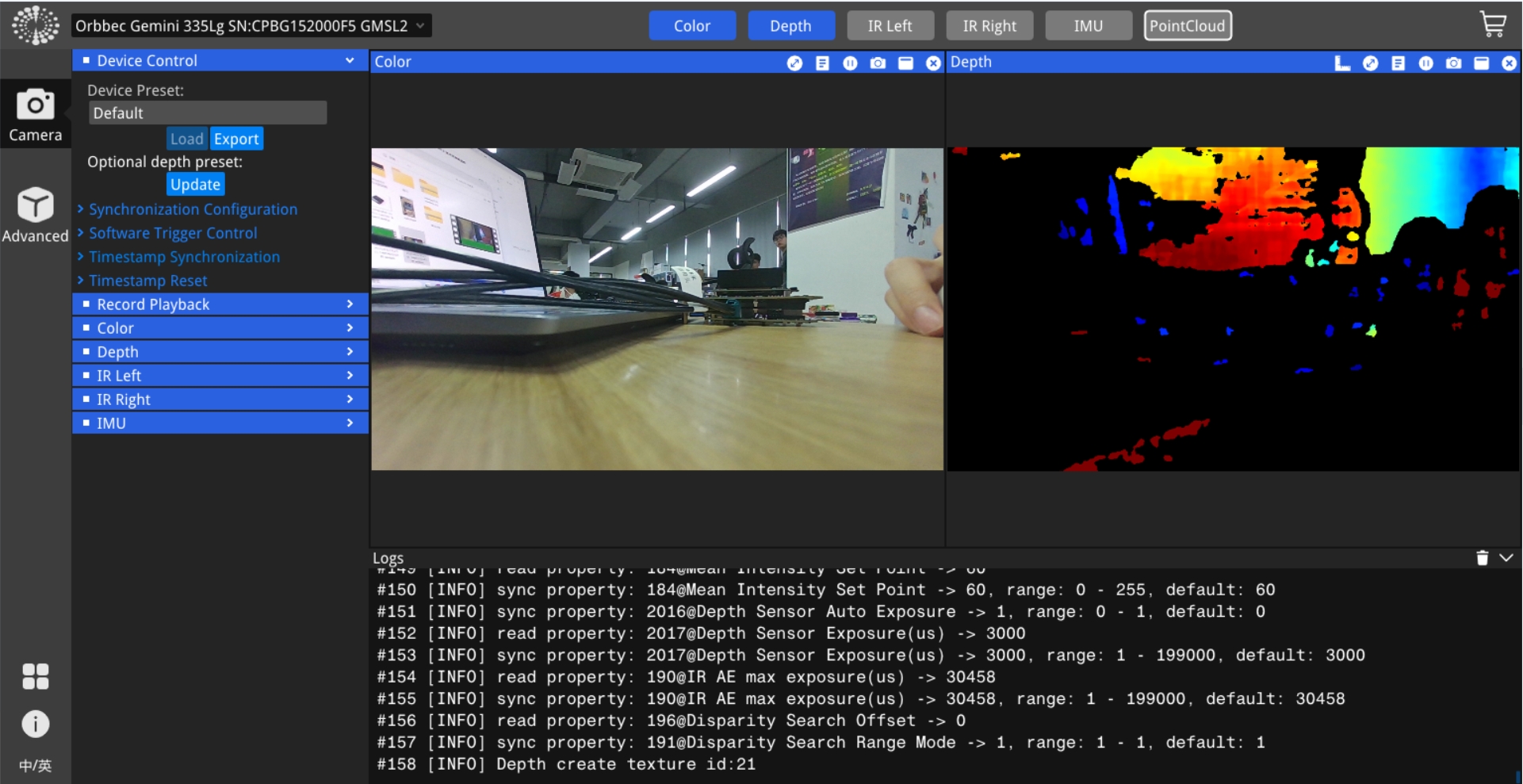
使用 OrbbecViewer 可视化结果
其他资源
技术支持与产品讨论
感谢您选择我们的产品!请确保在以下平台关注我们,以获取最新消息和支持。
