reComputer AI R2000 系列入门指南

reComputer AI R2000 系列是一款基于 Raspberry Pi 5 的强大边缘 AI 计算机。配备四核 Arm Cortex-A76 处理器、8GB RAM、M.2 SSD 支持,以及提供高达 26 TOPS 的 Hailo-8 AI 加速模块,实现实时、低延迟和高效的 AI 推理。它是各种 AI 应用的完美选择,包括 AI 驱动的视频分析、机器视觉和智能边缘计算。
特性
-
强大的散热能力:紧凑的设计和优化的热架构使其非常适合在资源受限的环境中部署,提供出色的散热性能。
-
强大的性能:由 Raspberry Pi 5 驱动,配备四核 Cortex-A76 CPU,高达 8GB RAM。
-
每秒 26 万亿次运算:由 Hailo AI 加速器驱动,提供高达 26 Tops 的集成计算能力。 丰富的接口:2x HDMI 4Kp60、1x 以太网端口、2x USB 3.0、2x USB 2.0。
-
无线连接:双频 Wi-Fi 和 Bluetooth 5.0/BLE。 灵活的存储选项:PCIe2.0 双 M.2 插槽支持 AI 加速器和 SSD 存储。
规格参数
| 参数 | 描述 |
|---|---|
| 硬件规格 | |
| CPU | Raspberry Pi 5,2.4GHz 四核 64 位 Arm Cortex-A76 |
| GPU | Raspberry Pi 5,VideoCore VII |
| AI 处理器 | Hailo-8 M.2 加速模块,每秒 26 万亿次运算 |
| RAM | 8GB SDRAM |
| 操作系统 | Raspberry Pi OS,Ubuntu |
| 系统规格 | |
| 电源供应 | 通过 USB-C 提供 5V/5A 直流电源,支持 Power Delivery |
| 视频解码器 | 4Kp60 HEVC 解码器 |
| Wi-Fi | 双频 802.11ac Wi-Fi® |
| 蓝牙 | Bluetooth 5.0/ BLE |
| 电源按钮 | 包含开/关按钮 |
| 接口 | |
| 存储 | 1 x microSD 卡插槽,支持高速 SDR104 模式 |
| M.2 插槽 | 2 x M.2 插槽,支持 M.2 NVMe SSD/Hailo M.2 加速模块 |
| USB 端口 | 2 × USB 3.0 端口 |
| 2 × USB 2.0 端口 | |
| 以太网 | 1 x 10/100/1000 Mbps |
| 摄像头/显示器 | 2 × 4 通道 MIPI 摄像头/显示器收发器 |
| 显示输出 | 2 x micro HDMI 端口(4Kp60) |
| 环境条件 | |
| 防护等级 | IP40 |
| 工作温度 | 0-45°C |
| 其他 | |
| 保修 | 1 年 |
| 产品生命周期 | 至少到 2036 年 1 月 |
| 认证 | CE、FCC、Telec、RoHS、REACH |
Hailo 介绍
硬件介绍
Hailo 提供专为边缘设备上高性能深度学习应用量身定制的尖端 AI 处理器。该公司的解决方案专注于在边缘实现下一代生成式 AI,以及由先进的 AI 加速器和视觉处理器驱动的感知和视频增强。配备 Hailo-8 NPU 加速器的 reComputer_R2000 提供 26 TOPs 的 AI 性能,能够在 YOLOv8s 上实现超过 200 FPS。
软件介绍
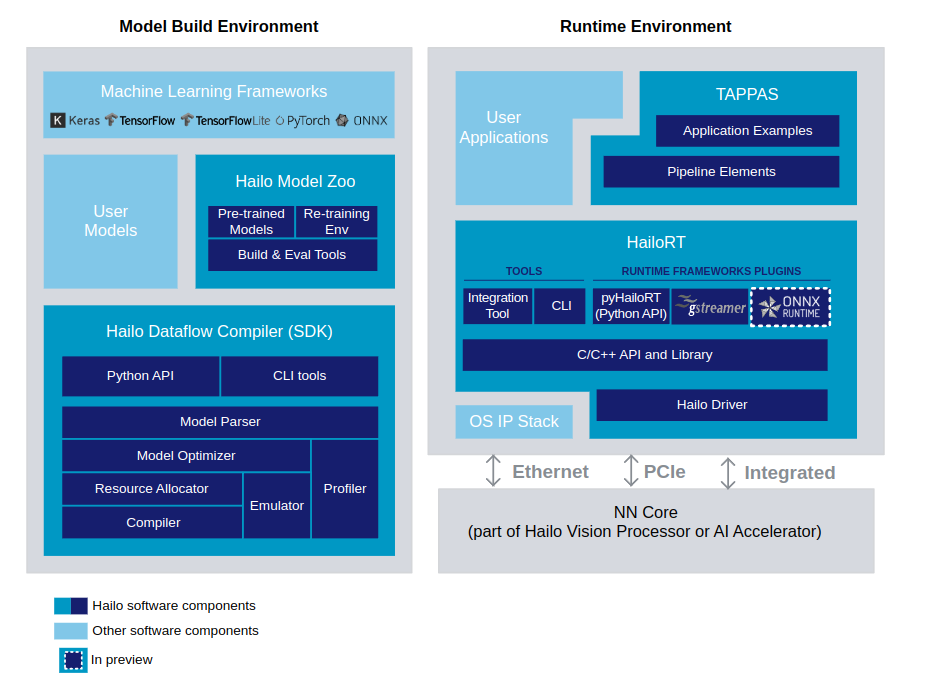
Hailo AI 软件套件提供强大的工具,可在硬件加速器上高效运行 AI 模型。它旨在与现有的深度学习框架无缝集成,为开发者提供流畅的工作流程。该过程涉及在模型构建环境中从 ONNX 文件生成 HEF(Hailo 可执行二进制文件)。创建后,HEF 文件被传输到推理机器(运行时环境),在那里使用 HailoRT API 执行推理。提供的脚本有助于在模型构建环境中将 ONNX 文件转换为 HEF 文件。
注意: 如果您想了解更多关于使用 Hailo NPU 的示例,请点击此链接。
硬件概述


刷写操作系统
您需要一张 SD 卡和一个读卡器。将 SD 卡插入读卡器,然后将读卡器的 USB 接口插入主机的 USB 端口。
Windows 主机
-
步骤 1. 从**这里**下载 Raspberry Pi Imager 软件
-
步骤 2. 打开 Raspberry Pi Imager 软件

- 步骤 3. 在键盘上按 CTRL + SHIFT + X 打开高级选项窗口

- 步骤 4. 点击 CHOOSE OS 并选择您首选的操作系统

注意 1: 我们建议现在刷写 (64-bit Raspberry Pi OS Debian 12 Bookworm)[https://downloads.raspberrypi.com/raspios_oldstable_full_arm64/images/raspios_oldstable_full_arm64-2025-10-02/2025-10-01-raspios-bookworm-arm64-full.img.xz] 镜像。新发布的基于 Debian 13 "Trixie" 的 Raspberry Pi OS 尚未更新 hailo-all 包,因此 Bookworm 将为您提供开箱即用的完整 Hailo 支持。 下载链接。
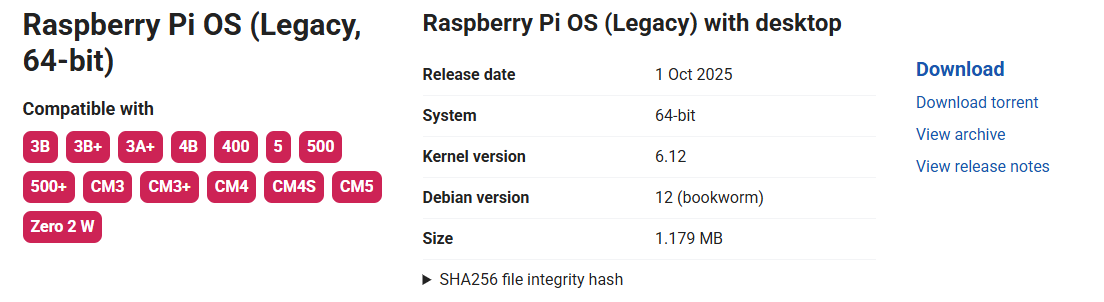
然后使用镜像工具的 Use custom 选项将其写入您的 SD 卡。

如果您仍想尝试最新镜像,**您需要手动安装 Hailo 软件,而不是使用一键 hailo-all 方式;**请按照此链接操作。
注意 2: 您可以通过导航到 Other general purpose OS 选择其他操作系统,如 64-bit Ubuntu
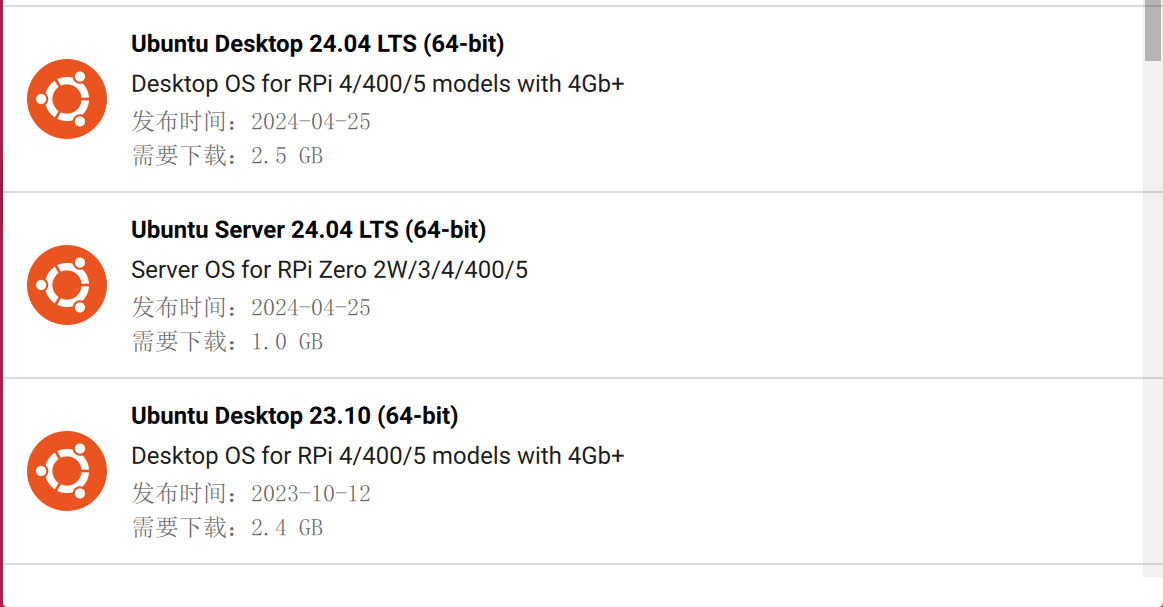
或者您可以使用此链接下载镜像文件:
-
步骤 5. 点击 CHOOSE STORAGE
-
步骤 6. 最后,点击 WRITE

请等待几分钟,直到刷写过程完成。
MAC 主机
在执行以下步骤之前,您需要安装 homebrew。
请打开终端并输入 brew -V 检查是否已正确设置 homebrew 环境,您应该看到已安装的 homebrew 环境版本。
-
步骤 1. 通过访问此链接下载并安装 Raspberry Pi Imager 应用程序
-
步骤 2. 打开 Raspberry Pi Imager 应用程序
- 步骤 3. 在键盘上按 CTRL + SHIFT + X 打开高级选项窗口
在这里您可以设置主机名、启用 SSH、设置密码、配置 wifi、设置本地设置等
- 步骤 4. 点击 CHOOSE OS 并选择您偏好的操作系统
注意: 您可以通过导航到 Other general purpose OS 来选择其他操作系统,如 64-bit Ubuntu
或者您可以使用此链接下载镜像文件:
-
步骤 5. 点击 CHOOSE STORAGE
-
步骤 6. 最后,点击 WRITE
Linux 主机电脑
- 步骤 1. 下载 snap
sudo apt install snap
- 步骤 2. 下载 rpi-imager
snap install rpi-imager
- 步骤 3. 打开 Raspberry Pi Imager 软件
rpi-imager
结果如下所示:

- 步骤 4. 在键盘上按 CTRL + SHIFT + X 打开 Advanced options 窗口
在这里您可以设置主机名、启用 SSH、设置密码、配置 wifi、设置本地设置等
- 步骤 5. 点击 CHOOSE OS 并选择您偏好的操作系统
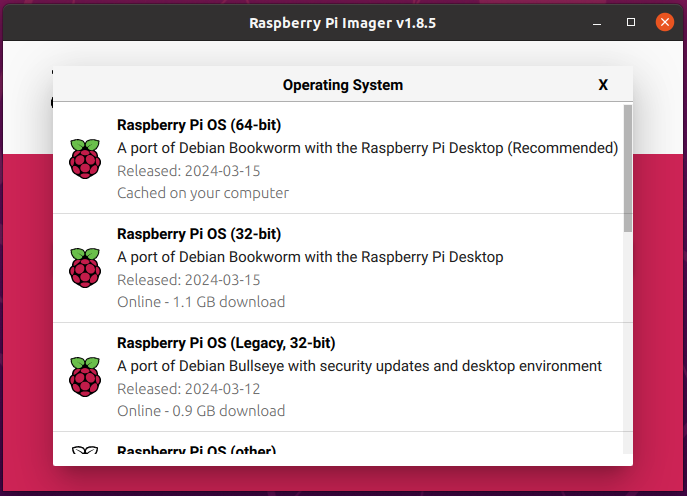
注意: 您可以通过导航到 Other general purpose OS 来选择其他操作系统,如 64-bit Ubuntu
或者您可以使用此链接下载镜像文件:
-
步骤 6. 点击 CHOOSE STORAGE 并选择连接的 eMMC 驱动器
-
步骤 7. 最后,点击 NEXT 和 YES

请等待几分钟直到刷写过程完成。 结果如下所示:

从 NVME 启动
更新 EEPROM
此方法适用于您有 SD 卡并已成功启动设备的情况。请确保您的系统是最新的 Raspberry Pi 系统(Bookworm 或更高版本),并且您的 RPi 5 固件已更新到 2023-12-06(12 月 6 日)或更新版本,否则可能无法识别 NVME 相关配置。
步骤 1:确保您的 Raspberry Pi 系统是最新的(Bookworm 或更高版本),输入以下命令更新 RPi 5 固件:
sudo apt update && sudo apt upgrade -y
sudo rpi-eeprom-update # If it is not post-December 2023 type the following into a terminal to start the configuration tool
sudo raspi-config
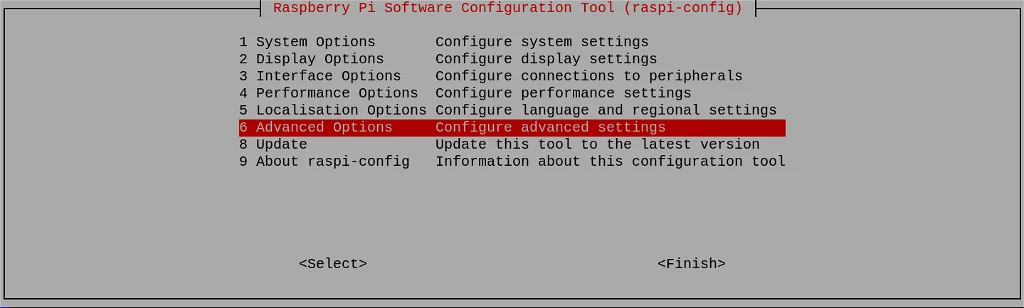
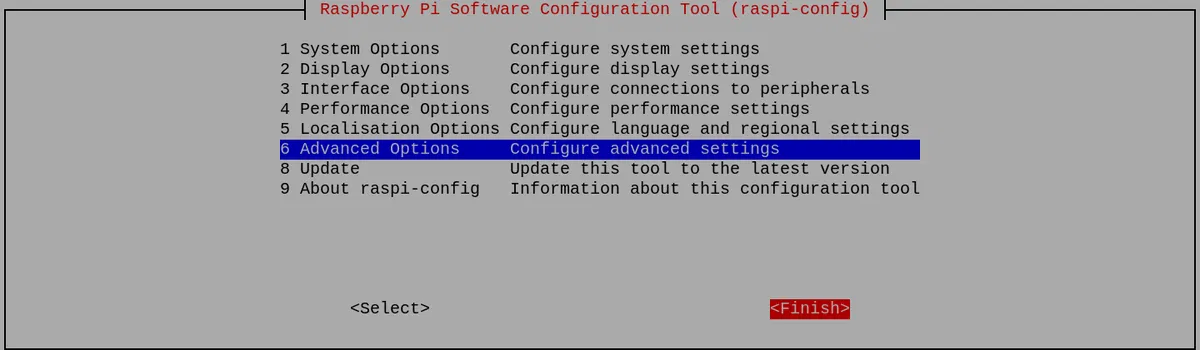
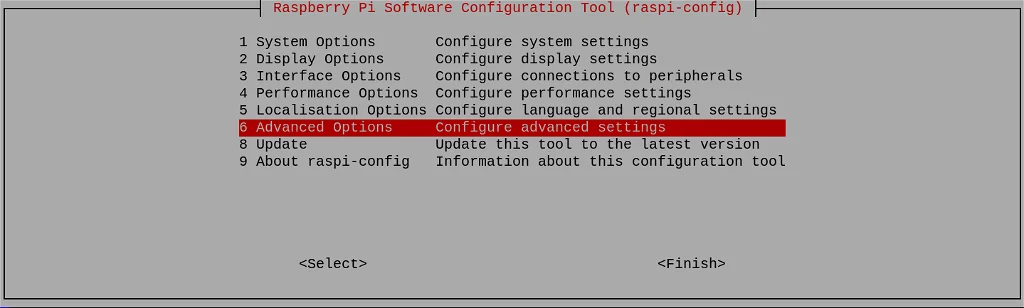
向下滚动到 Advanced Options 并按 Enter:
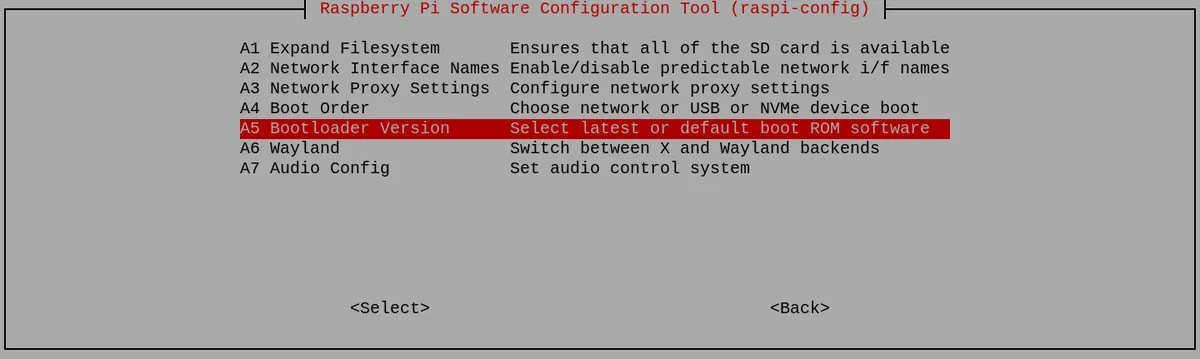
向下滚动到 Bootloader Version 并按 Enter:
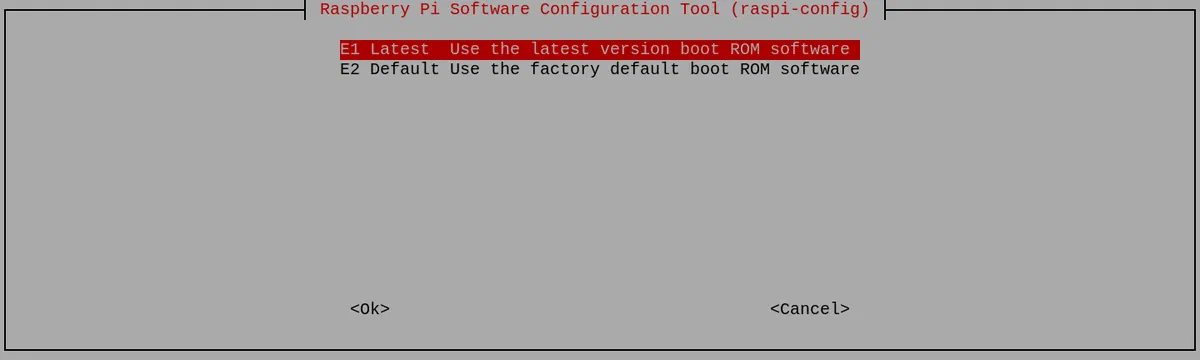
最后选择 Latest,并按 Enter:
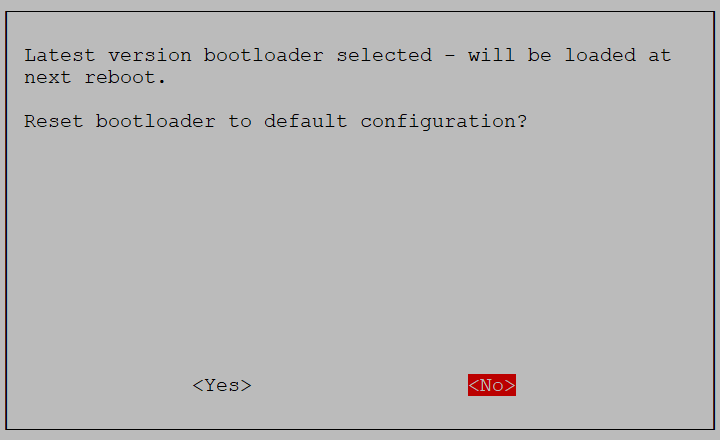
在这里选择 No - 您需要 latest 引导加载程序。
通过选择 Finish 退出工具:
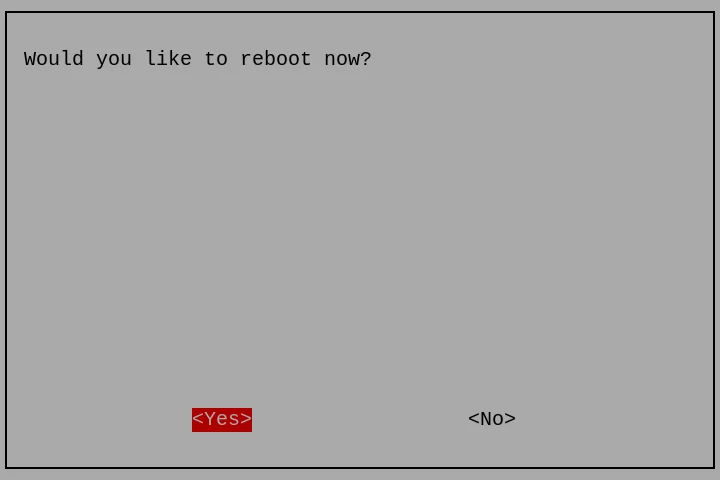
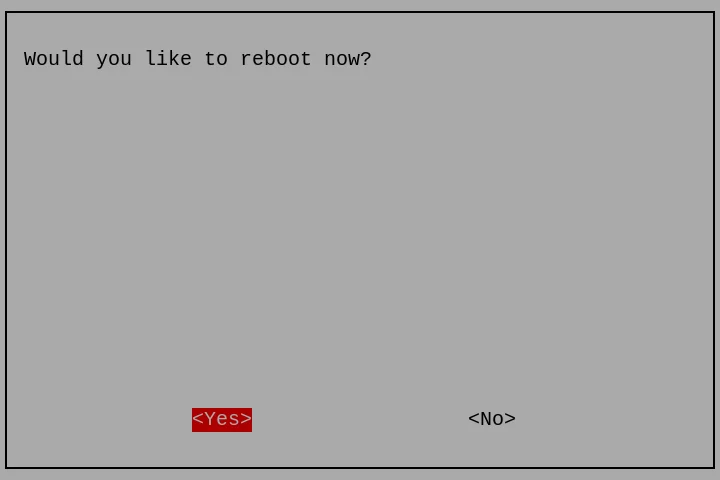
如果询问是否重启,选择 Yes。
步骤 2:在主屏幕上点击 Applications =>Accessories =>SD Card Copier,运行 SD Card Copier 程序,将操作系统复制到 NVME SSD,如下图所示。
设置 Raspberry Pi 从 NVMe SSD 启动
如果您可以轻松访问 SD 卡插槽,您可以关闭 Pi,取出 SD 卡,(如果一切按预期工作)下次启动时它应该会自动从 NVMe 驱动器启动。但是,如果您想将 SD 卡留在原位并仍然从 NVMe 启动,您需要更改启动顺序。
步骤 1:输入以下命令:
sudo raspi-config
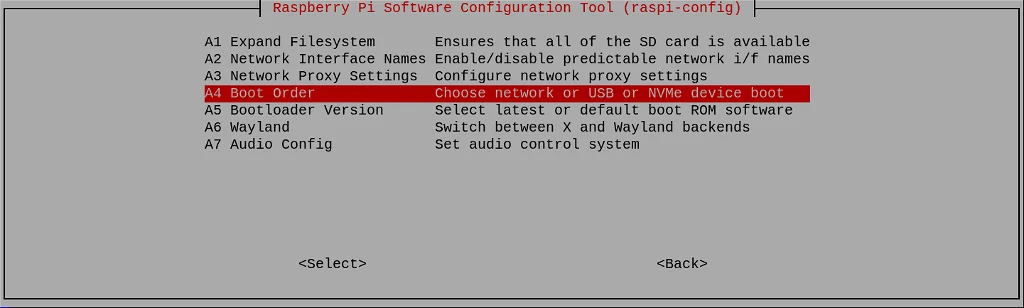
向下滚动到 Advanced Options 并按 Enter:
步骤 2:向下滚动到 Boot Order 并按 Enter:
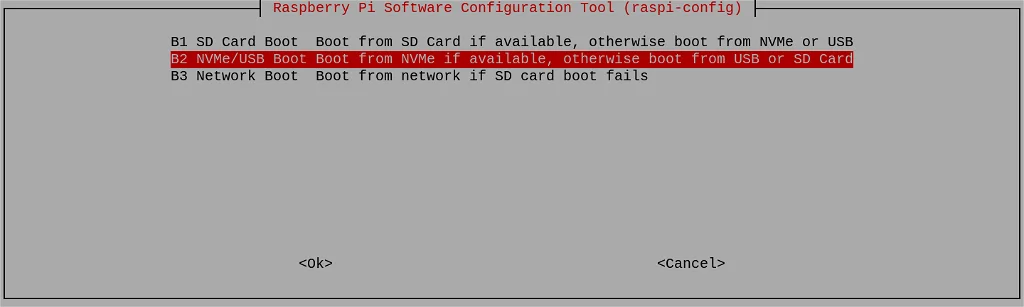
步骤 3:选择 NVMe/USB Boot 并按 Enter:
配置将被确认。按 Enter:
步骤 4:通过选择 Back 或按 Esc 键返回第一个屏幕。然后使用右光标键导航到 Finish。
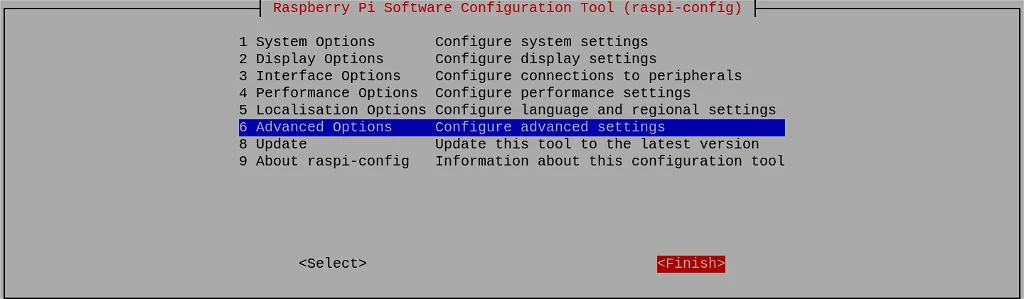
系统会询问您是否现在重启。点击 Yes:
将 Ubuntu 刷写到 NVME
第一步:使用 SD 卡更新 EEPROM
请参考此链接。
要将 NVMe 启动顺序设置为最高优先级,请使用以下命令:
sudo rpi-eeprom-config --edit
然后像下面这样更改 rpi-eeprom-config:
BOOT_UART=1
BOOT_ORDER=0xf461
NET_INSTALL_AT_POWER_ON=1
PCIE_PROBE=1
使用 Ctrl+X 并输入 y 保存结果。结果如下:

第二步:将 Ubuntu 烧录到 NVMe
打开 Raspberry Pi Imager:
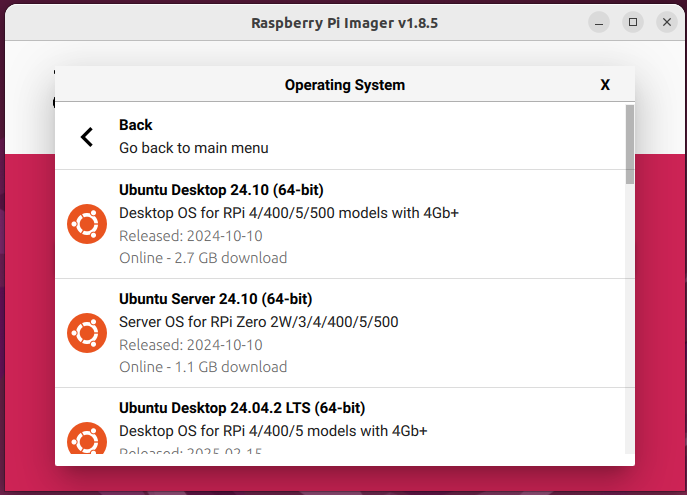
选择 Ubuntu 操作系统:
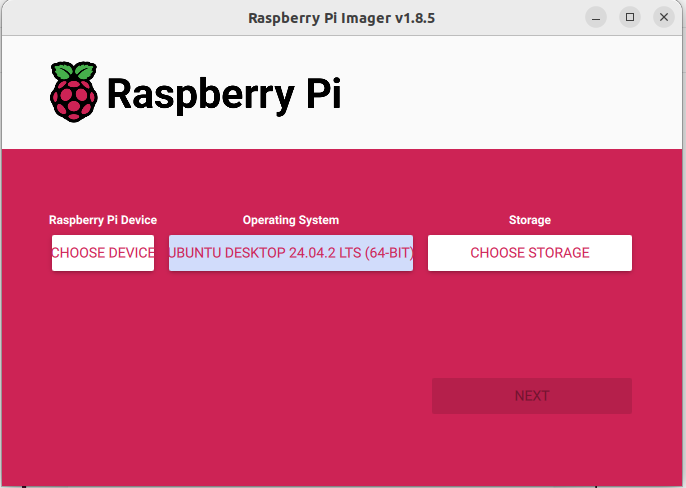
最后,点击 Next 并等待刷写过程完成。
第三步:替换操作系统文件
使用此链接安装 pcie-fix.dtbo
将 pcie-fix.dtbo 复制到 /overlays 文件夹,如下所示:

修改 config.txt,在文件末尾添加 dtoverlay=pcie-fix,如下所示:
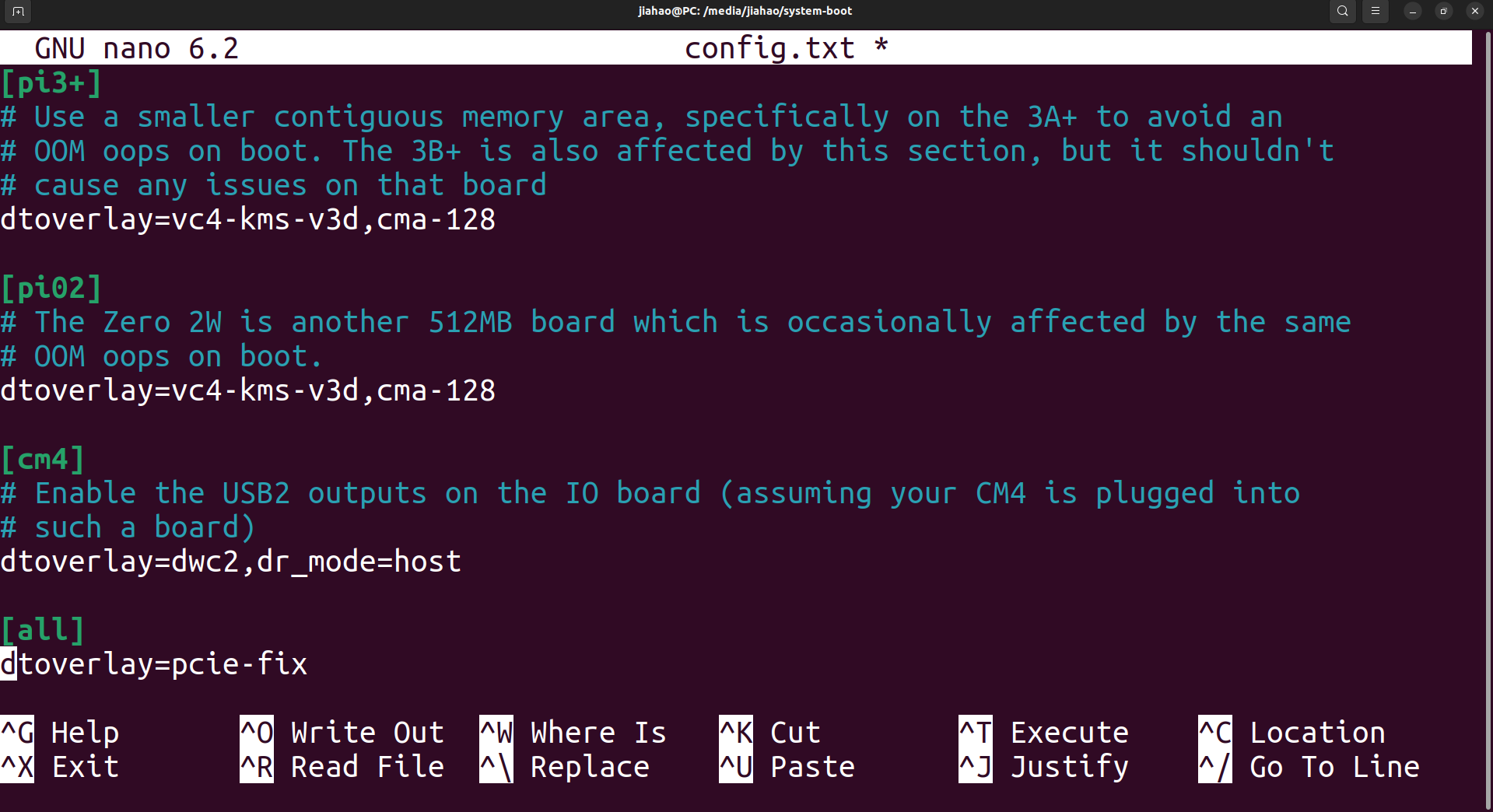
然后使用 Ctrl+X 并输入 y 保存此文件。
功耗和温度
⚠️ 注意: 待机状态在以下条件下测试:图形界面被禁用,蓝牙被关闭,Wi-Fi 被禁用。命令如下所示:
sudo ifconfig wlan0 down
sudo systemctl stop bluetooth
sudo systemctl stop lightdm
| 条件 | 功耗 | 温度 |
|---|---|---|
| 待机 | 5.9w | cpu:46°C |
| 正常运行 | 6.3w | cpu:53°C |
| 最大负载 | 16.2w | cpu:75°C hailo8:81°C |
应用
Frigate
Frigate 是一个开源的 NVR(网络视频录像机),专为使用 AI 进行实时目标检测而设计。它与现有摄像头集成,使用机器学习模型(如 TensorFlow 和 Coral)对视频流进行目标检测。Frigate 针对低延迟和高性能视频处理进行了优化,提供运动检测、实时视频流和自动警报等功能。
注意: 如果您想了解更多关于此项目的信息,请参考此链接。
YOLO
YOLO(You Only Look Once)系列模型是一系列专为速度和准确性而设计的实时目标检测模型。与传统的目标检测方法分别执行区域提议和分类不同,YOLO 在神经网络的单次前向传递中执行这两项任务,使其速度更快。YOLO 模型将图像分割成网格,并为每个网格单元预测边界框和类别概率。多年来,YOLO 已经通过各种版本不断发展,在准确性、速度和检测较小物体的能力方面都有所改进。YOLOv4、YOLOv5 以及最新的 YOLOv7 和 YOLOv8 模型广泛用于监控、自动驾驶汽车和机器人等应用。
注意: 如果您想了解更多关于此项目的信息,请参考此链接。
Clip
CLIP(Contrastive Language-Image Pretraining)是 OpenAI 开发的一种机器学习模型,能够同时理解图像和文本。它经过训练可以将图像与相应的文本描述关联起来,使其能够执行涉及两种模态的任务。CLIP 具有零样本学习能力,这意味着它可以识别图像中的物体和概念,而无需专门针对这些类别进行训练。它在各种任务中表现出色,如图像分类、目标检测,甚至生成图像的文本描述。
注意: 如果您想了解更多关于此项目的信息,请参考此链接。
技术支持与产品讨论
感谢您选择我们的产品!我们在此为您提供不同的支持,以确保您使用我们产品的体验尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。