将 JetPack 操作系统刷写到 A603 载板
A603 载板是一款功能强大的扩展板,支持 Jetson Orin™ NX/Nano 模块。它具有 1 GbE 端口、用于 SSD 的 M.2 Key M、用于 WiFi/蓝牙的 M.2 Key E、CSI 和 HDMI,可实现高质量的视频捕获和显示。它还包含 4 个 USB 端口、风扇、RTC、灵活的 9-20V 电源供应。通过紧凑的设计,它可以灵活且轻松地集成到各种边缘计算应用中。在本教程中,我们将向您展示如何将 Jetpack 刷写到连接到 A603 载板的 NVMe SSD 和 USB 闪存驱动器。
支持的模块
- NVIDIA® Jetson Orin™ Nano 模块 4GB
- NVIDIA® Jetson Orin™ Nano 模块 8GB
- NVIDIA® Jetson Orin™ NX 模块 8GB
- NVIDIA® Jetson Orin™ NX 模块 16GB
前提条件
- Ubuntu 20.04/22.04/24.04 主机 PC
- A603 载板 + Jetson Orin NX 或 Jetson Orin Nano 模组
- Micro-USB 或 Type-C 数据传输线
- 电源适配器
进入强制恢复模式
在我们进行安装步骤之前,我们需要确保板子处于强制恢复模式。
逐步详细教程
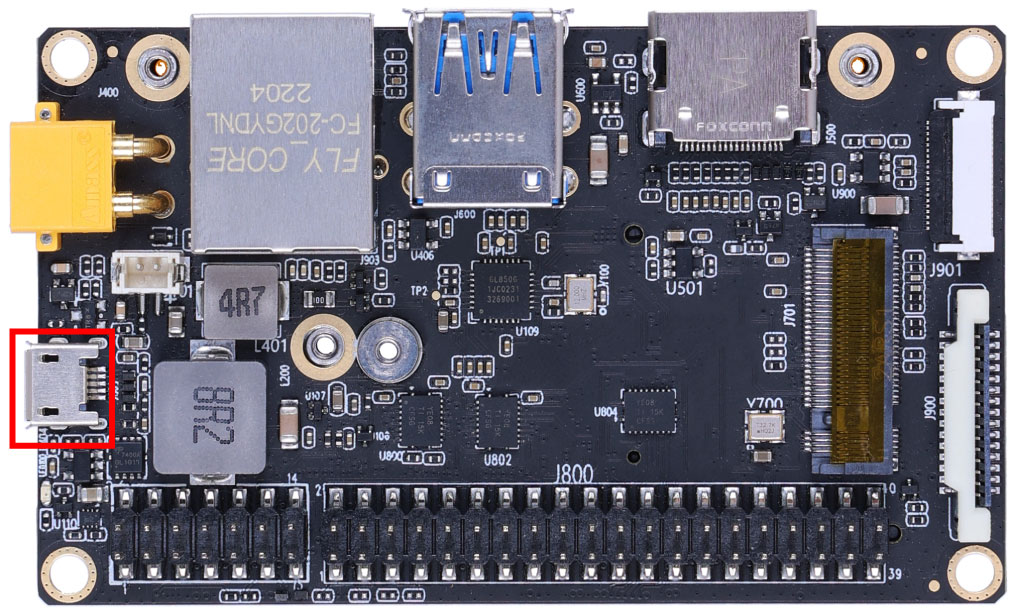
步骤 1. 在板子上的 micro-USB 连接器和 Linux 主机 PC 之间连接 USB 线
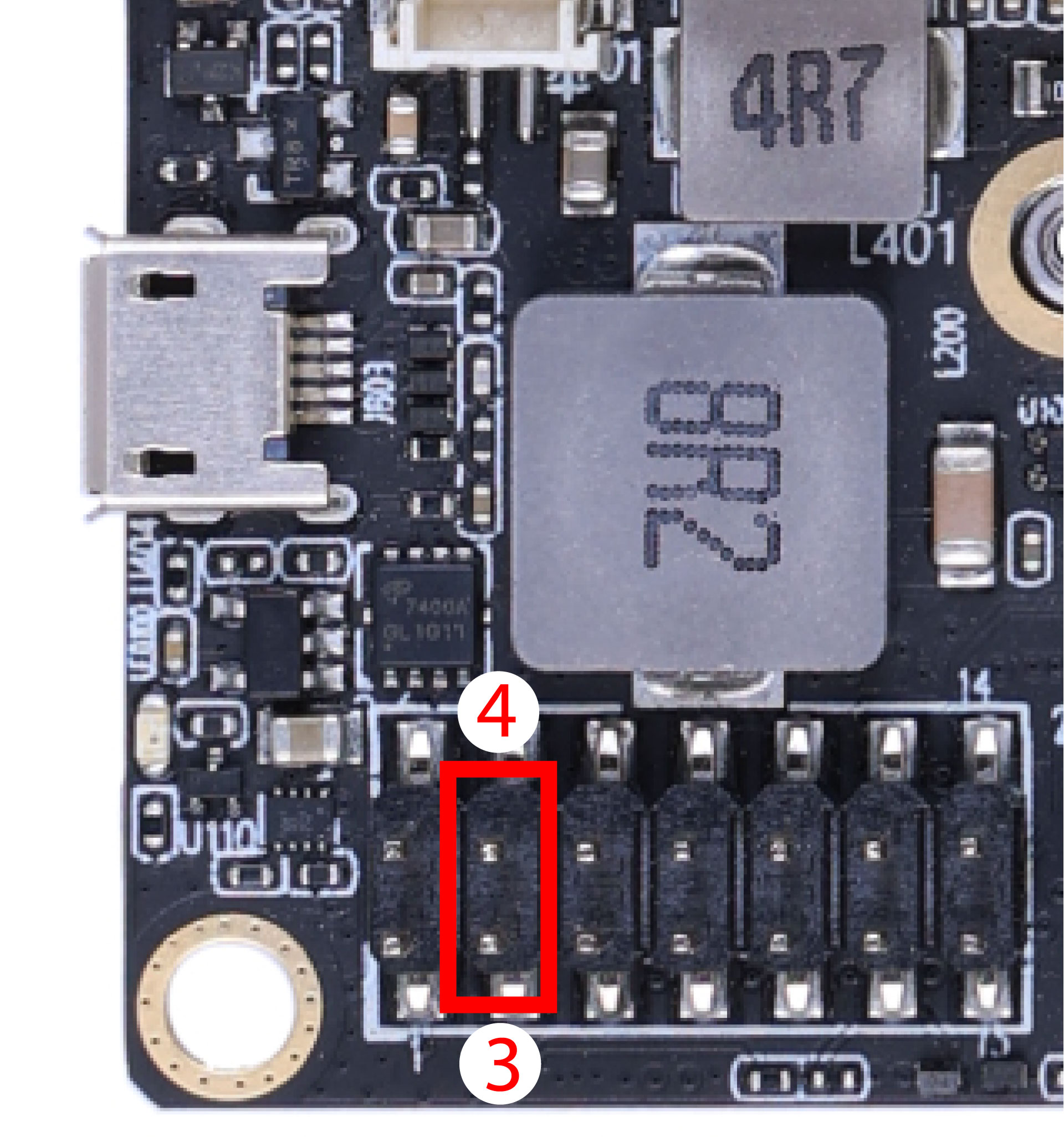
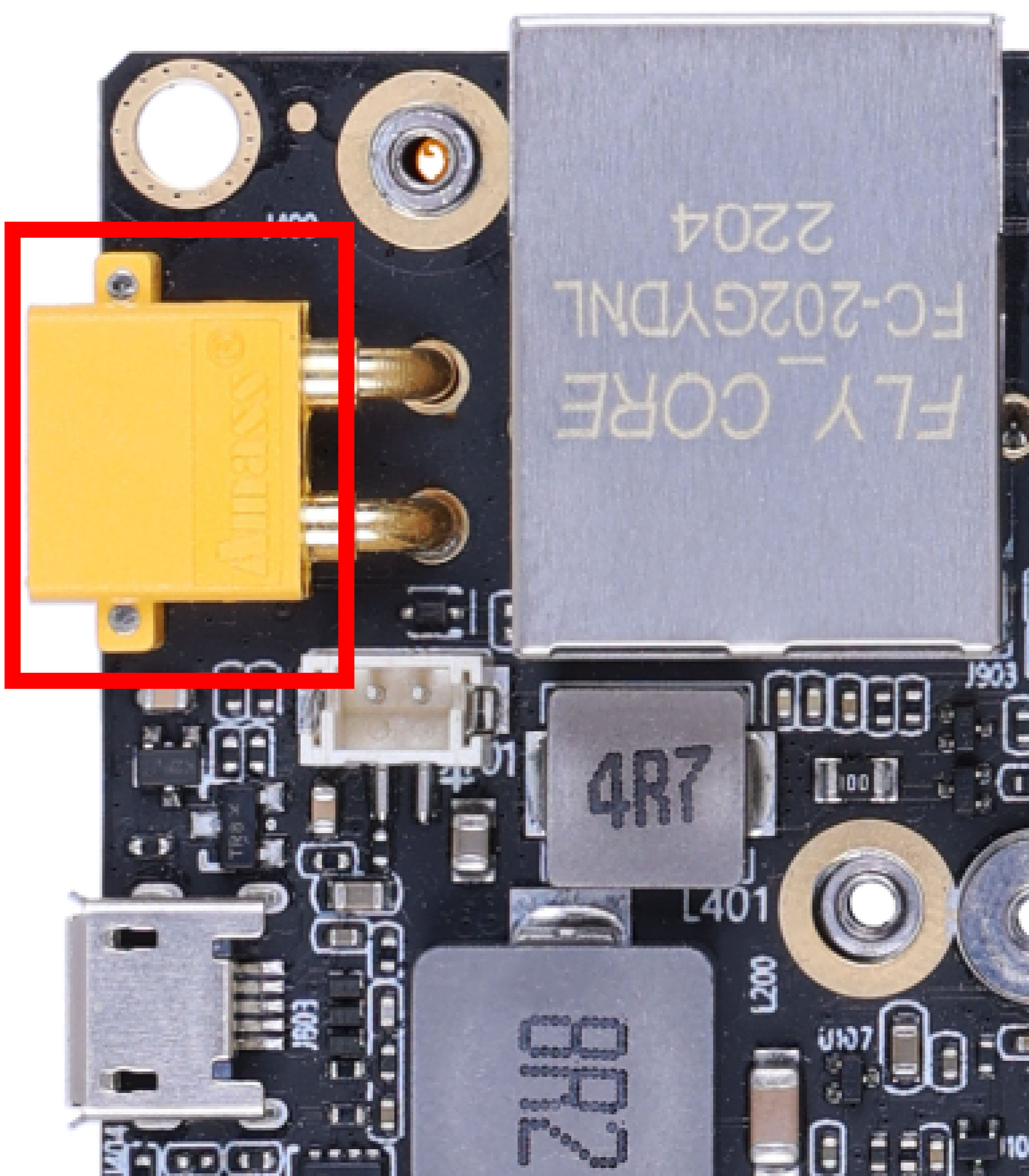
步骤 2. 在 14 针排针的第 3 针和第 4 针之间连接跳线
步骤 3. 将电源适配器连接到板子上的 DC 插座以给板子供电
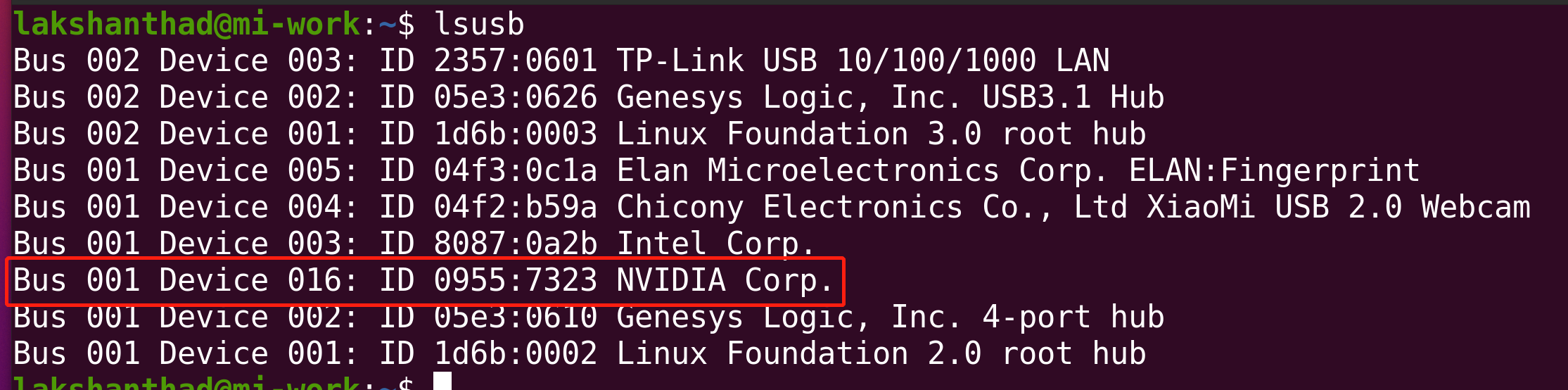
步骤 4. 在 Linux 主机 PC 上,打开终端窗口并输入命令 lsusb。如果返回的内容根据您使用的 Jetson SoM 有以下输出之一,则板子处于强制恢复模式。
- 对于 Orin NX 16GB:0955:7323 NVidia Corp
- 对于 Orin NX 8GB:0955:7423 NVidia Corp
- 对于 Orin Nano 8GB:0955:7523 NVidia Corp
- 对于 Orin Nano 4GB:0955:7623 NVidia Corp
下图是 Orin NX 16GB 的示例。
步骤 5. 移除跳线。
下载外设驱动程序
首先,您需要为此开发板安装外设驱动程序。这些驱动程序是开发板上某些硬件外设正常工作所必需的。请点击下面的链接,根据 Jetson 模块下载相应的驱动程序
| Jetson 模块 | JetPack 版本 | L4T 版本 | 下载链接 |
|---|---|---|---|
| Jetson Orin NX 8GB/ 16GB | 5.1 | 35.2.1 | 下载 |
| 5.1.1 | 35.3.1 | 下载 | |
| Jetson Orin Nano 4GB/ 8GB | 5.1.1 | 35.3.1 | 下载 |
| Jetson Orin NX 8GB/ 16GB, Jetson Orin Nano 4GB/ 8GB | 5.1.2 | 35.4.1 | 下载 |
| Jetson Orin NX 8GB/ 16GB, Jetson Orin Nano 4GB/ 8GB | 5.1.4 | 35.6.0 | 下载 |
| Jetson Orin NX 8GB/ 16GB, Jetson Orin Nano 4GB/ 8GB | 6.0 | 36.3 | 下载 |
| Jetson Orin NX 8GB/ 16GB, Jetson Orin Nano 4GB/ 8GB | 6.1 | 36.4 | 下载 |
| Jetson Orin NX 8GB/ 16GB, Jetson Orin Nano 4GB/ 8GB | 6.2 | 36.4.3 | 下载 |
| Jetson Orin NX 8GB/ 16GB, Jetson Orin Nano 4GB/ 8GB | 7.2 | 39.2.0 | 下载 |
要验证下载固件的完整性,您可以比较 SHA256 哈希值。
在 Ubuntu 主机上,打开终端并运行命令 sha256sum <File> 来获取下载文件的 SHA256 哈希值。如果得到的哈希值与此处提供的 SHA256 哈希值匹配,则确认您下载的固件是完整且完好的。
注意: 目前我们提供上述驱动程序。随着新 JetPack 版本的发布,我们将在未来持续更新驱动程序。
刷写到 Jetson
这里有一个将 JetPack 6.1 刷写到 A603 载板 + Orin Nx 16GB 模块的视频。您可以参考视频和下面的详细步骤来刷写您的设备。
在开始刷写之前,需要注意的是 Jetson Orin NX 模块仅支持 JetPack 5.1 及以上版本,而 Jetson Orin Nano 模块仅支持 JetPack 5.1.1 及以上版本。
- JP5.1.1 for Jetson Orin NX
- JP5.1.1 for Jetson Orin Nano
- JP5.1.2
- JP5.1.4
- JP6.0
- JP6.1
- JP6.2
- JP7.2
这里我们将在 A603 载板配合 Jetson Orin NX 模块上安装 Jetpack 5.1.1。
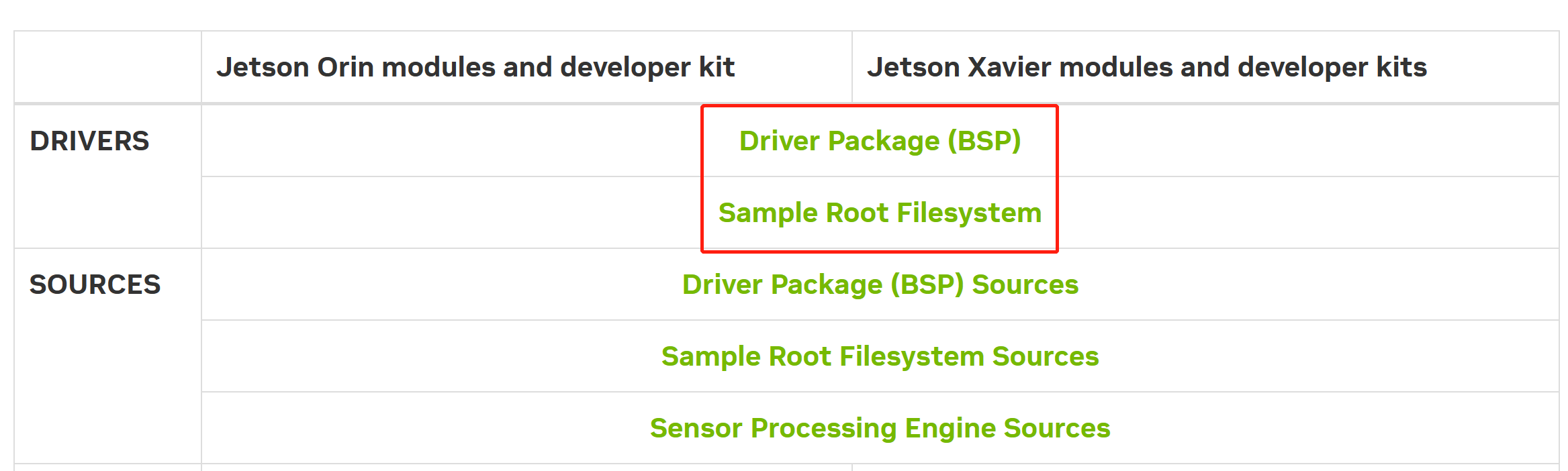
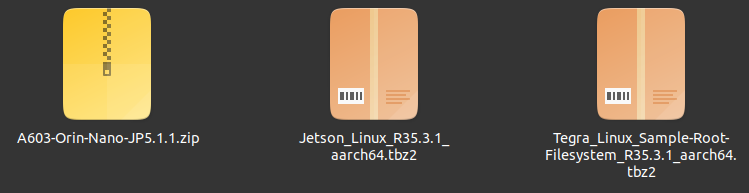
步骤 1: 在主机 PC 上下载 NVIDIA 驱动程序。所需的驱动程序如下所示:
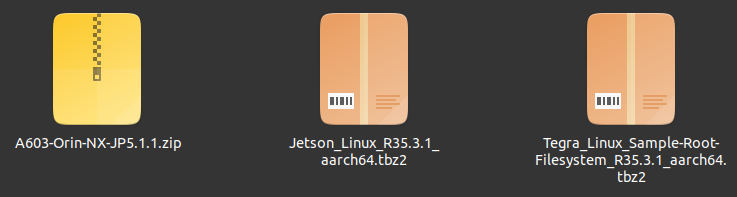
步骤 2: 将之前下载的外设驱动程序移动到与 NVIDIA 驱动程序相同的文件夹中。现在您将在同一文件夹中看到三个压缩文件。
步骤 3: 通过导航到包含这些文件的文件夹来解压 Jetson_Linux_R35.3.1_aarch64.tbz2 和 Tegra_Linux_Sample-Root-Filesystem_R35.3.1_aarch64.tbz2,应用更改并安装必要的先决条件
tar xf Jetson_Linux_R35.3.1_aarch64.tbz2
sudo tar xpf Tegra_Linux_Sample-Root-Filesystem_R35.3.1_aarch64.tbz2 -C Linux_for_Tegra/rootfs/
cd Linux_for_Tegra/
sudo ./apply_binaries.sh
sudo ./tools/l4t_flash_prerequisites.sh
步骤 4: 解压 A603-Orin-NX-JP5.1.1.zip。这里我们额外安装了解压 .zip 文件所需的 unzip 软件包
cd ..
sudo apt install unzip
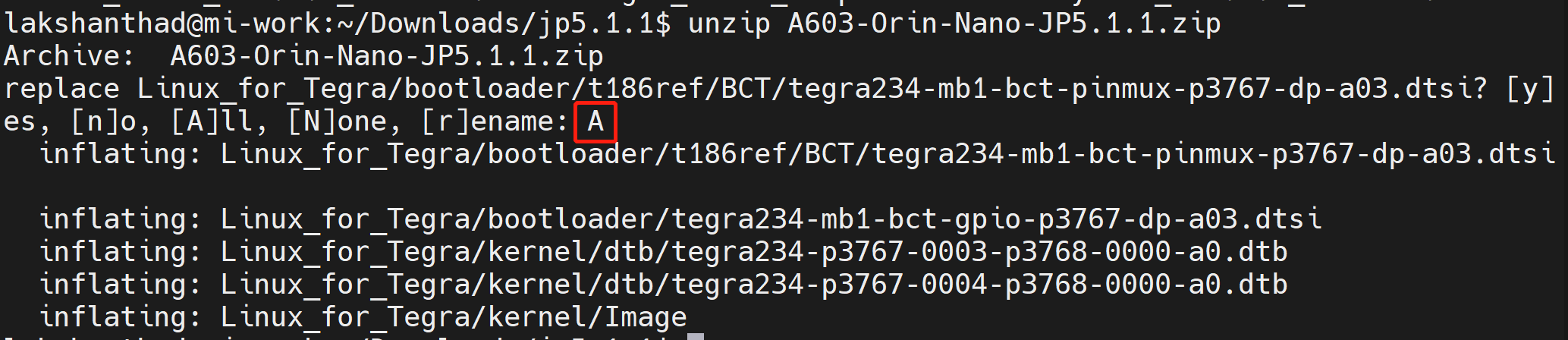
unzip A603-Orin-NX-JP5.1.1.zip
这里会询问是否替换文件。输入 A 并按 ENTER 键来替换必要的文件

步骤 5: 配置您的用户名、密码和主机名,这样设备启动完成后就不需要进入 Ubuntu 安装向导。
首先使用 cd Linux_for_Tegra 确保您在正确的目录中。
sudo tools/l4t_create_default_user.sh -u {USERNAME} -p {PASSWORD} -a -n {HOSTNAME} --accept-license
例如(用户名:"nvidia",密码:"nvidia",设备名称:"nvidia-desktop"):
sudo tools/l4t_create_default_user.sh -u nvidia -p nvidia -a -n nvidia-desktop --accept-license
步骤 6: 将系统刷写到 NVMe SSD 或 USB 闪存驱动器
sudo ./tools/kernel_flash/l4t_initrd_flash.sh --external-device nvme0n1p1 \
-c tools/kernel_flash/flash_l4t_external.xml -p "-c bootloader/t186ref/cfg/flash_t234_qspi.xml" \
--showlogs --network usb0 p3509-a02+p3767-0000 internal
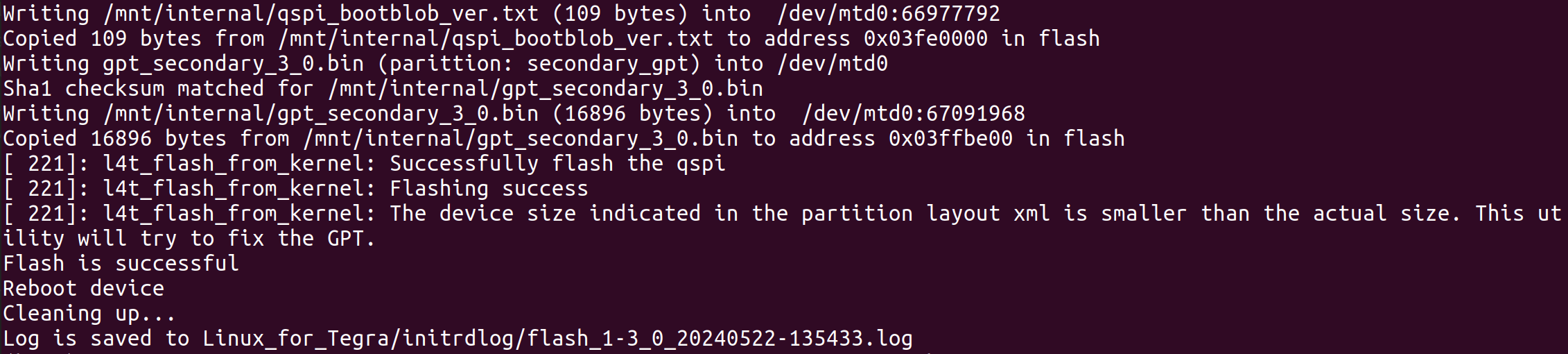
如果刷写过程成功,您将看到以下输出
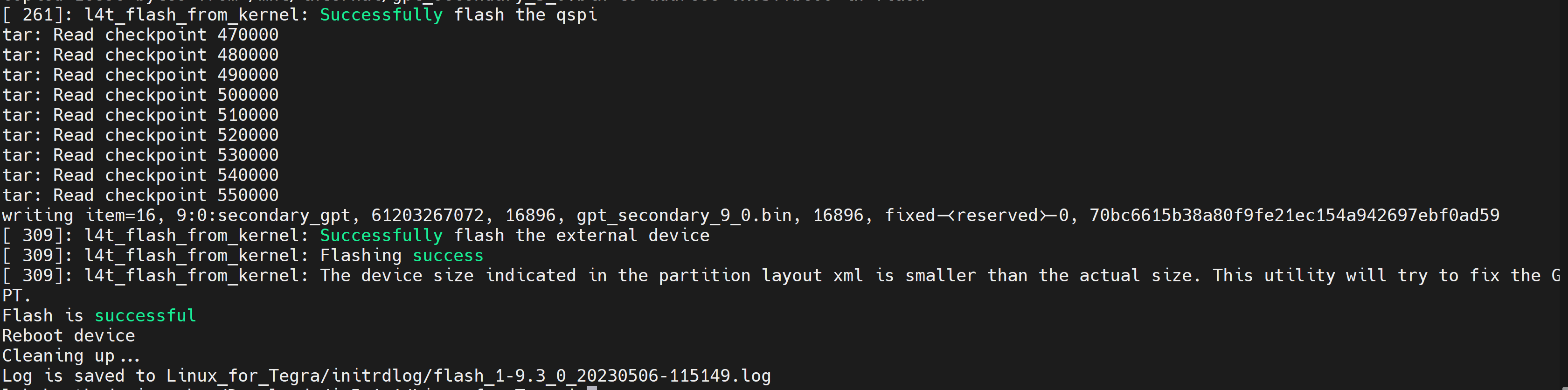
这里我们将使用 NVIDIA L4T 35.3.1 在搭载 Jetson Orin Nano 模块的 A603 载板上安装 Jetpack 5.1.1
步骤 1: 在主机 PC 上下载 NVIDIA 驱动程序。所需的驱动程序如下所示:
步骤 2: 将之前下载的外设驱动程序移动到与 NVIDIA 驱动程序相同的文件夹中。现在您将在同一文件夹中看到三个压缩文件。
步骤 3: 通过导航到包含这些文件的文件夹来解压 Jetson_Linux_R35.3.1_aarch64.tbz2 和 Tegra_Linux_Sample-Root-Filesystem_R35.3.1_aarch64.tbz2,应用更改并安装必要的先决条件
tar xf Jetson_Linux_R35.3.1_aarch64.tbz2
sudo tar xpf Tegra_Linux_Sample-Root-Filesystem_R35.3.1_aarch64.tbz2 -C Linux_for_Tegra/rootfs/
cd Linux_for_Tegra/
sudo ./apply_binaries.sh
sudo ./tools/l4t_flash_prerequisites.sh
步骤 4: 解压 A603-Orin-NX-JP5.1.1.zip。这里我们额外安装了解压 .zip 文件所需的 unzip 软件包
cd ..
sudo apt install unzip
unzip A603-Orin-NX-JP5.1.1.zip
这里会询问是否替换文件。输入 A 并按 ENTER 键来替换必要的文件
步骤 5: 配置您的用户名、密码和主机名,这样设备启动完成后就不需要进入 Ubuntu 安装向导
sudo tools/l4t_create_default_user.sh -u {USERNAME} -p {PASSWORD} -a -n {HOSTNAME} --accept-license
例如(用户名:"nvidia",密码:"nvidia",设备名称:"nvidia-desktop"):
sudo tools/l4t_create_default_user.sh -u nvidia -p nvidia -a -n nvidia-desktop --accept-license
步骤 6: 将系统刷写到 NVMe SSD 或 USB 闪存驱动器
cd Linux_for_Tegra
sudo ./tools/kernel_flash/l4t_initrd_flash.sh --external-device nvme0n1p1 \
-c tools/kernel_flash/flash_l4t_external.xml -p "-c bootloader/t186ref/cfg/flash_t234_qspi.xml" \
--showlogs --network usb0 jetson-orin-nano-devkit internal
如果刷写过程成功,您将看到以下输出。
在这里我们将在带有 Jetson Orin 模块的 A603 载板上安装 Jetpack 5.1.2。
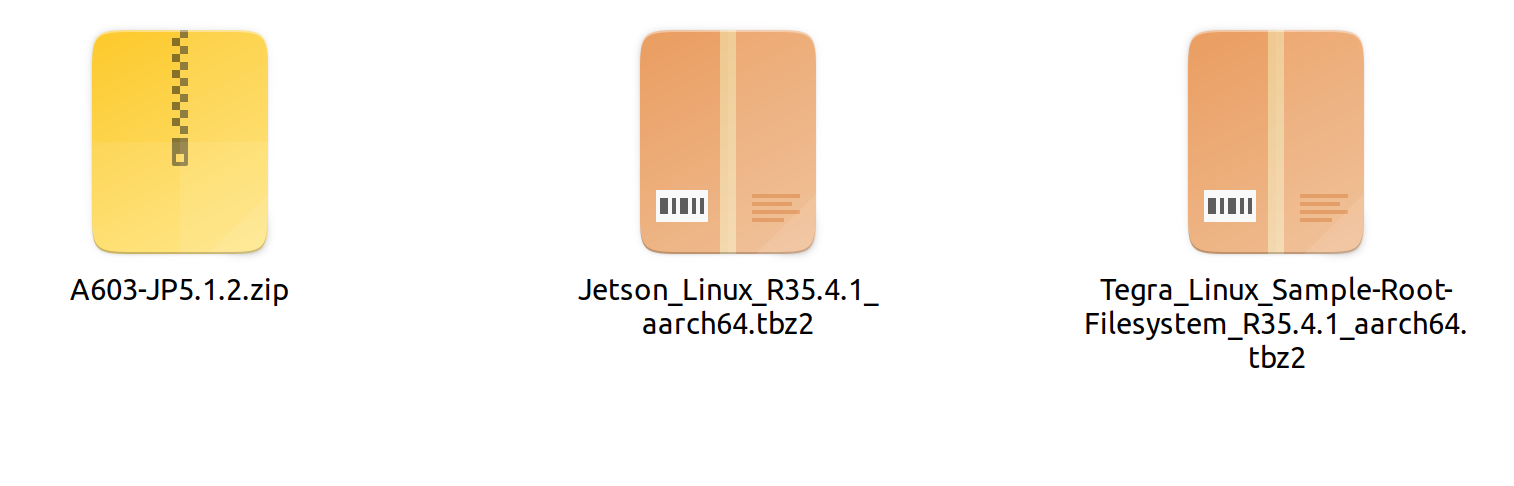
步骤 1: 在主机 PC 上下载 NVIDIA 驱动程序。所需的驱动程序如下所示:
步骤 2: 将之前下载的外设驱动程序移动到与 NVIDIA 驱动程序相同的文件夹中。现在您将在同一文件夹中看到三个压缩文件。
步骤 3: 通过导航到包含这些文件的文件夹来提取 Jetson_Linux_R35.4.1_aarch64.tbz2 和 Tegra_Linux_Sample-Root-Filesystem_R35.4.1_aarch64.tbz2,应用更改并安装必要的先决条件。
tar xf Jetson_Linux_R35.4.1_aarch64.tbz2
sudo tar xpf Tegra_Linux_Sample-Root-Filesystem_R35.4.1_aarch64.tbz2 -C Linux_for_Tegra/rootfs/
cd Linux_for_Tegra/
sudo ./apply_binaries.sh
sudo ./tools/l4t_flash_prerequisites.sh
步骤 4: 解压 A603-JP5.1.2.zip。这里我们额外安装了解压 .zip 文件所需的 unzip 软件包。
cd ..
sudo apt install unzip
unzip A603-JP5.1.2.zip
步骤 5: 配置您的用户名、密码和主机名,这样设备启动完成后您就不需要进入 Ubuntu 安装向导。
sudo tools/l4t_create_default_user.sh -u {USERNAME} -p {PASSWORD} -a -n {HOSTNAME} --accept-license
例如(用户名:"nvidia",密码:"nvidia",设备名称:"nvidia-desktop"):
sudo tools/l4t_create_default_user.sh -u nvidia -p nvidia -a -n nvidia-desktop --accept-license
步骤 6: 将系统刷写到NVMe SSD。
cd Linux_for_Tegra
sudo ./tools/kernel_flash/l4t_initrd_flash.sh --external-device nvme0n1p1 -c tools/kernel_flash/flash_l4t_external.xml -p "-c bootloader/t186ref/cfg/flash_t234_qspi.xml" --showlogs --network usb0 jetson-orin-nano-devkit internal
如果刷写过程成功,您将看到以下输出。
这里我们将在带有 Jetson Orin 模块的 A603 载板上安装 Jetpack 5.1.4。
步骤 1: 在主机 PC 上下载 NVIDIA 驱动程序:
wget https://developer.nvidia.com/downloads/embedded/l4t/r35_release_v6.0/release/jetson_linux_r35.6.0_aarch64.tbz2
wget https://developer.nvidia.com/downloads/embedded/l4t/r35_release_v6.0/release/tegra_linux_sample-root-filesystem_r35.6.0_aarch64.tbz2
步骤 2: 组装刷机包 按顺序执行以下命令:
tar xf jetson_linux_r35.6.0_aarch64.tbz2
sudo tar xpf tegra_linux_sample-root-filesystem_r35.6.0_aarch64.tbz2 -C Linux_for_Tegra/rootfs/
tar zxpf 603_jp514.tar.gz # Unzip the driver package
sudo cp -r 603_jp514/Linux_for_Tegra/* Linux_for_Tegra/ # Replace all files in the Linux_for_Tegra directory with the files from the driver package
cd Linux_for_Tegra/ # Navigate to the Linux_for_Tegra path to run the flashing commands
sudo ./apply_binaries.sh
sudo ./tools/l4t_flash_prerequisites.sh
步骤 3: 将设备置于恢复模式。设备必须处于恢复模式才能进行刷写。按照以下步骤进入恢复模式:
- 短接载板上的 REC 引脚和 GND 引脚。
- 使用 Micro USB 数据线将载板连接到 PC。
- 给设备上电。
- 在 PC 上运行
lsusb并检查产品 ID 是否为以下之一:7323、7423、7523 或 7623。这表示设备处于恢复模式:- 7323:Orin NX 16G
- 7423:Orin NX 8G
- 7523:Orin Nano 8G
- 7623:Orin Nano 4G
步骤 4: 刷写设备。
sudo ./tools/kernel_flash/l4t_initrd_flash.sh --external-device nvme0n1p1 -c tools/kernel_flash/flash_l4t_external.xml -p "-c bootloader/t186ref/cfg/flash_t234_qspi.xml" --showlogs --network usb0 jetson-orin-nano-devkit internal
提示: 使用备份镜像备份系统并刷写
-
如果您将系统刷写到了 SSD 上,请运行以下命令:
-
备份镜像(需要恢复模式):
sudo ./tools/backup_restore/l4t_backup_restore.sh -e nvme0n1 -b jetson-orin-nano-devkit -
使用备份镜像刷写(需要恢复模式):
sudo ./tools/backup_restore/l4t_backup_restore.sh -e nvme0n1 -r jetson-orin-nano-devkit
完成后,设备可以启动进入系统。
-
这里我们将在带有 Jetson Orin 模块的 A603 载板上安装 Jetpack 6.0。
步骤 1: 在主机 PC 上下载 NVIDIA 驱动程序。所需的驱动程序如下所示:
步骤 2: 将之前下载的外设驱动程序移动到与 NVIDIA 驱动程序相同的文件夹中。现在您将在同一文件夹中看到三个压缩文件。
步骤 3: 通过导航到包含这些文件的文件夹,解压 Jetson_Linux_R36.3.0_aarch64.tbz2 和 Tegra_Linux_Sample-Root-Filesystem_R36.3.0_aarch64.tbz2。
sudo tar xf Jetson_Linux_R36.3.0_aarch64.tbz2
sudo tar xpf Tegra_Linux_Sample-Root-Filesystem_R36.3.0_aarch64.tbz2 -C Linux_for_Tegra/rootfs/
步骤 4: 解压 A603-JP6.0.zip。这里我们额外安装了解压缩 .zip 文件所需的 unzip 软件包。
cd ..
sudo apt install unzip
sudo unzip A603-JP6.0.zip
然后,将三个文件夹 (A603-JP6.0.zip 中的 bootloader、kernel、rootfs) 复制到 Linux_for_Tegra 文件夹中。
步骤 5: 应用更改并安装必要的先决条件
cd Linux_for_Tegra/
sudo ./apply_binaries.sh
sudo ./tools/l4t_flash_prerequisites.sh
步骤 6: 配置您的用户名、密码和主机名,这样设备启动完成后您就不需要进入 Ubuntu 安装向导。
sudo tools/l4t_create_default_user.sh -u {USERNAME} -p {PASSWORD} -a -n {HOSTNAME} --accept-license
例如(用户名:"nvidia",密码:"nvidia",设备名称:"nvidia-desktop"):
sudo tools/l4t_create_default_user.sh -u nvidia -p nvidia -a -n nvidia-desktop --accept-license
步骤 7: 将系统刷写到 NVMe SSD。
cd Linux_for_Tegra
sudo ./tools/kernel_flash/l4t_initrd_flash.sh --external-device nvme0n1p1 -c tools/kernel_flash/flash_l4t_t234_nvme.xml -p "-c bootloader/generic/cfg/flash_t234_qspi.xml" --showlogs --network usb0 jetson-orin-nano-devkit internal
如果刷写过程成功,您将看到以下输出。
这里我们将在带有 Jetson Orin 模块的 A603 载板上安装 Jetpack 6.1。
步骤 1: 在主机 PC 上下载 NVIDIA 驱动程序:
wget https://developer.nvidia.com/downloads/embedded/l4t/r36_release_v4.0/release/Jetson_Linux_R36.4.0_aarch64.tbz2
wget https://developer.nvidia.com/downloads/embedded/l4t/r36_release_v4.0/release/Tegra_Linux_Sample-Root-Filesystem_R36.4.0_aarch64.tbz2
步骤 2: 组装刷机包 按顺序执行以下命令:
tar xf Jetson_Linux_R36.4.0_aarch64.tbz2
sudo tar xpf Tegra_Linux_Sample-Root-Filesystem_R36.4.0_aarch64.tbz2 -C Linux_for_Tegra/rootfs/
tar xpf 603_jetpack6.1.tar.gz # Unzip the driver package
sudo cp -r 603_jetpack6.1/Linux_for_Tegra/* Linux_for_Tegra/ # Replace all files in the Linux_for_Tegra directory with the files from the driver package
cd Linux_for_Tegra/ # Navigate to the Linux_for_Tegra path to run the flashing commands
sudo ./apply_binaries.sh
sudo ./tools/l4t_flash_prerequisites.sh
步骤 3: 将设备置于恢复模式。设备必须处于恢复模式才能进行刷写。按照以下步骤进入恢复模式:
- 短接载板上的 REC 引脚和 GND 引脚。
- 使用 Micro USB 数据线将载板连接到 PC。
- 给设备上电。
- 在 PC 上运行
lsusb并检查产品 ID 是否为以下之一:7323、7423、7523 或 7623。这表示设备处于恢复模式:- 7323:Orin NX 16G
- 7423:Orin NX 8G
- 7523:Orin Nano 8G
- 7623:Orin Nano 4G
步骤 4: 刷写设备。
sudo ./tools/kernel_flash/l4t_initrd_flash.sh --external-device nvme0n1p1 -c tools/kernel_flash/flash_l4t_t234_nvme.xml -p "-c bootloader/generic/cfg/flash_t234_qspi.xml" --showlogs --network usb0 jetson-orin-nano-devkit internal
备份系统并使用备份镜像刷写
如果您将系统刷写到了 SSD 上,请运行以下命令:
-
备份镜像(需要恢复模式):
sudo ./tools/backup_restore/l4t_backup_restore.sh -e nvme0n1 -b jetson-orin-nano-devkit -
使用备份镜像刷写(需要恢复模式):
sudo ./tools/backup_restore/l4t_backup_restore.sh -e nvme0n1 -r jetson-orin-nano-devkit完成后,设备可以启动进入系统。
这里我们将在带有 Jetson Orin 模块的 A603 载板上安装 Jetpack 6.2。
步骤 1: 在主机 PC 上下载 NVIDIA 驱动程序:
wget https://developer.nvidia.com/downloads/embedded/l4t/r36_release_v4.3/release/Jetson_Linux_r36.4.3_aarch64.tbz2
wget https://developer.nvidia.com/downloads/embedded/l4t/r36_release_v4.3/release/Tegra_Linux_Sample-Root-Filesystem_r36.4.3_aarch64.tbz2
步骤 2: 组装刷写包
请注意,我们需要将 Nvidia 驱动程序和外设驱动程序放在同一个目录中,然后在该目录中打开终端并执行以下代码:
tar xf Jetson_Linux_r36.4.3_aarch64.tbz2
sudo tar xpf Tegra_Linux_Sample-Root-Filesystem_r36.4.3_aarch64.tbz2 -C Linux_for_Tegra/rootfs/
sudo tar zxpf 603_jp62.tar.gz
sudo cp -r 603_jp62/Linux_for_Tegra/* Linux_for_Tegra/
cd Linux_for_Tegra/
sudo ./tools/l4t_flash_prerequisites.sh
sudo ./apply_binaries.sh
步骤 3: 将设备置于恢复模式。设备必须处于恢复模式才能进行刷写。按照以下步骤进入恢复模式:
- 短接载板上的 REC 引脚和 GND 引脚。
- 使用 Micro USB 数据线将载板连接到 PC。
- 给设备上电。
- 在 PC 上运行
lsusb并检查产品 ID 是否为以下之一:7323、7423、7523 或 7623。这表示设备处于恢复模式:- 7323:Orin NX 16G
- 7423:Orin NX 8G
- 7523:Orin Nano 8G
- 7623:Orin Nano 4G
步骤 4: 刷写设备。
sudo ./tools/kernel_flash/l4t_initrd_flash.sh --external-device nvme0n1p1 \
-c tools/kernel_flash/flash_l4t_t234_nvme.xml -p "-c bootloader/generic/cfg/flash_t234_qspi.xml" \
--showlogs --network usb0 jetson-orin-nano-devkit-super internal
提示:备份系统并使用备份镜像刷写
如果您将系统刷写到了 SSD 上,请运行以下命令:
-
备份镜像(需要恢复模式):
sudo ./tools/backup_restore/l4t_backup_restore.sh -e nvme0n1 -b jetson-orin-nano-devkit-super -
使用备份镜像刷写(需要恢复模式):
sudo ./tools/backup_restore/l4t_backup_restore.sh -e nvme0n1 -r jetson-orin-nano-devkit-super完成后,设备可以启动进入系统。
这里我们将在 A603 载板配合 Jetson Orin NX 或 Jetson Orin Nano 模组上安装 JetPack 7.2。
硬件准备
- Ubuntu 20.04/22.04/24.04 主机 PC
- Type-C 数据线
- A603 载板 + Jetson Orin NX 或 Jetson Orin Nano 模组
- 电源适配器
步骤 1: 在 Ubuntu 系统的电脑上执行以下命令下载 NVIDIA 系统镜像包:
wget https://developer.nvidia.com/downloads/embedded/L4T/r39_Release_v2.0/release/Jetson_Linux_R39.2.0_aarch64.tbz2
wget https://developer.nvidia.com/downloads/embedded/L4T/r39_Release_v2.0/release/Tegra_Linux_Sample-Root-Filesystem_R39.2.0_aarch64.tbz2
步骤 2: 下载 A603 JetPack 7.2 外设驱动包 603_jp72.tbz2,将其放到 NVIDIA 系统镜像包所在目录,然后执行以下命令解压和组装刷机包:
# 解压官方刷机包文件
tar xf Jetson_Linux_R39.2.0_aarch64.tbz2
sudo tar xpf Tegra_Linux_Sample-Root-Filesystem_R39.2.0_aarch64.tbz2 -C Linux_for_Tegra/rootfs/
# 创建 A603 解压目录
mkdir 603_jp72/
cp 603_jp72.tbz2 603_jp72/
cd 603_jp72
sudo tar xf 603_jp72.tbz2
# 进入 Linux_for_Tegra 目录并执行配置脚本
cd ../Linux_for_Tegra/
sudo ./tools/l4t_flash_prerequisites.sh
sudo ./apply_binaries.sh
# 替换驱动包文件和目录到 Linux_for_Tegra 目录下
cp -r ../603_jp72/bootloader/ ./
cp -r ../603_jp72/kernel/ ./
cp ../603_jp72/p3768-0000-p3767-0000-a0.conf ./
sudo cp -r ../603_jp72/rootfs/ ./
步骤 3: 将设备置于 Recovery 模式。设备必须进入 Recovery 模式才能进行刷机,步骤如下:
- 短接载板的 RECOVERY 引脚与 GND 引脚。
- 使用 Type-C 数据线连接载板和电脑。
- 设备上电。
- 在电脑上执行
lsusb,看到产品 ID 为7323、7423、7523或7623,即表示设备已进入 Recovery 模式。- 7323:Orin NX 16GB
- 7423:Orin NX 8GB
- 7523:Orin Nano 8GB
- 7623:Orin Nano 4GB
步骤 4: 将系统刷写到固态硬盘:
sudo ./l4t_initrd_flash.sh --erase-all jetson-orin-nano-devkit-super internal
刷机完成后,设备将自动启动。
提示:系统备份与恢复
-
备份镜像(进入 Recovery 模式):
sudo ./tools/backup_restore/l4t_backup_restore.sh -e nvme0n1 -b jetson-orin-nano-devkit-super -
使用备份的镜像刷机(进入 Recovery 模式):
sudo ./tools/backup_restore/l4t_backup_restore.sh -e nvme0n1 -r jetson-orin-nano-devkit-super
CAN 接口
由于 A603 载板上有 CAN 收发器,您不需要像开发套件那样额外的收发器。
步骤1. 安装 devmem2 以向寄存器写入值:
sudo apt-get install devmem2
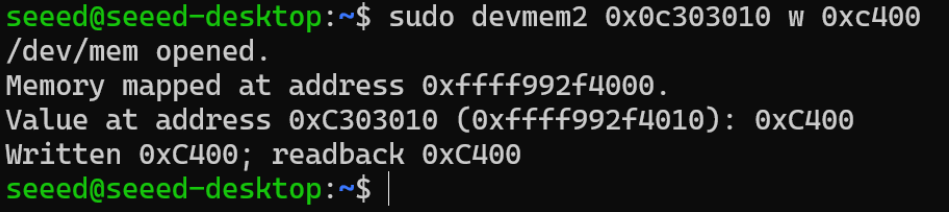
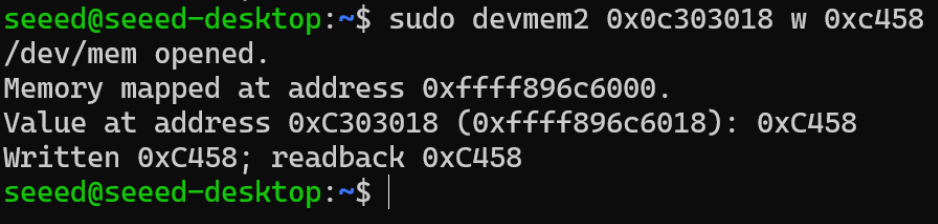
步骤2. 根据这里的说明写入数值。
sudo devmem2 0x0c303010 w 0xc400
sudo devmem2 0x0c303018 w 0xc458
步骤3. 加载内核模块:
sudo modprobe can
sudo modprobe can_raw
sudo modprobe mttcan
加载这些模块后,您应该能够在 sudo dmesg 中看到这些日志:

步骤4. 启动 can0 接口:
sudo ip link set can0 type can bitrate 500000
你可以选择将比特率更改为 1000000。然后,调出 can0:
sudo ip link set can0 up
使用 ifconfig 检查接口:

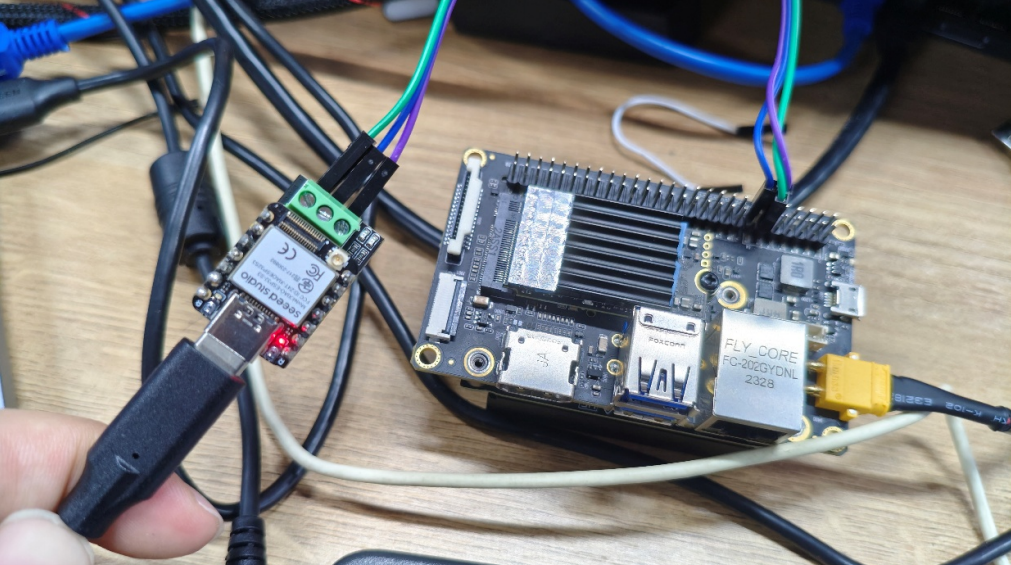
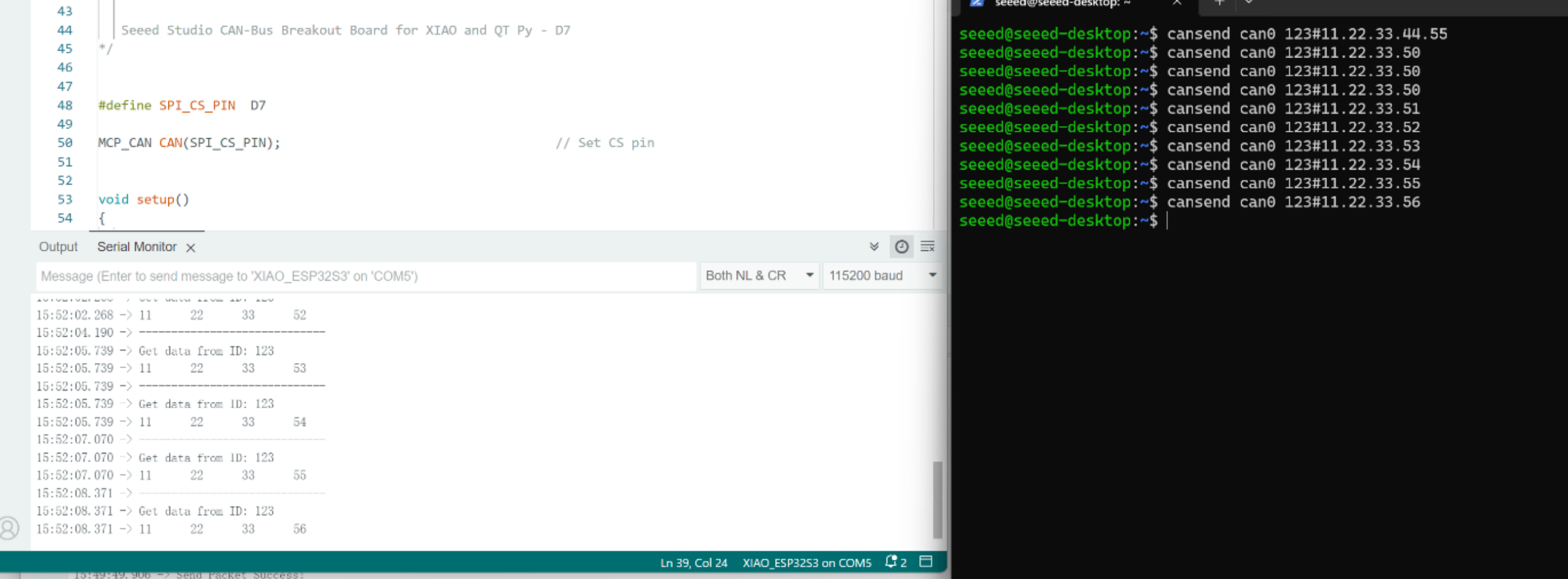
步骤5. 发送数据(需要安装 can-utils)。在另一端,我们使用带有 CAN 扩展板的 MCU 来接收数据。
在 jetson 终端运行 cansend can0 123#11.22.33.50:
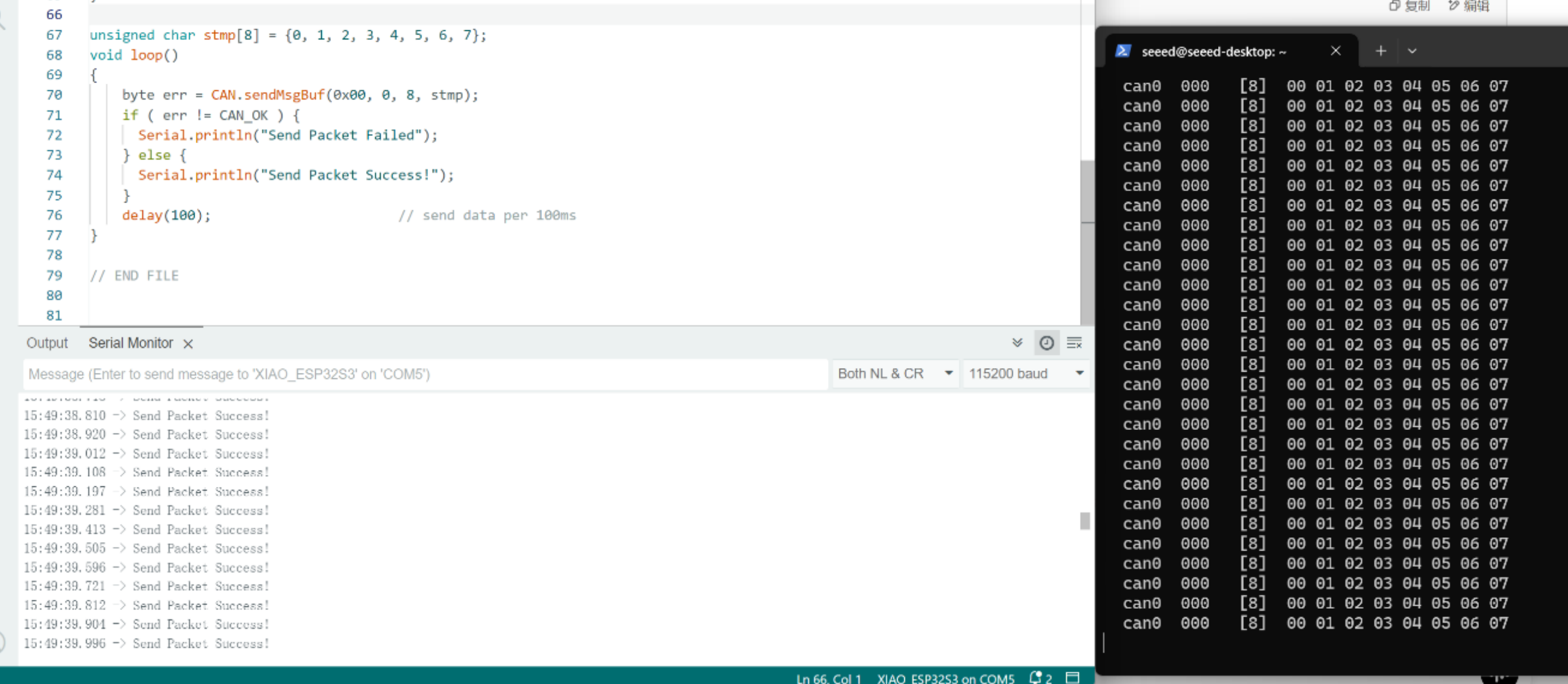
步骤6. 接收数据。在另一端,我们使用带有 CAN 扩展板的 MCU 来发送数据。
在 jetson 终端运行 candump can0:
资源
技术支持与产品讨论
感谢您选择我们的产品!我们在这里为您提供不同的支持,以确保您使用我们产品的体验尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。