reComputer Industrial J40, J30 硬件和接口使用说明
本 wiki 介绍了 reComputer Industrial J4012、J4011、J3011、J3010 上各种不同的硬件和接口,以及如何使用它们来扩展您的项目想法。
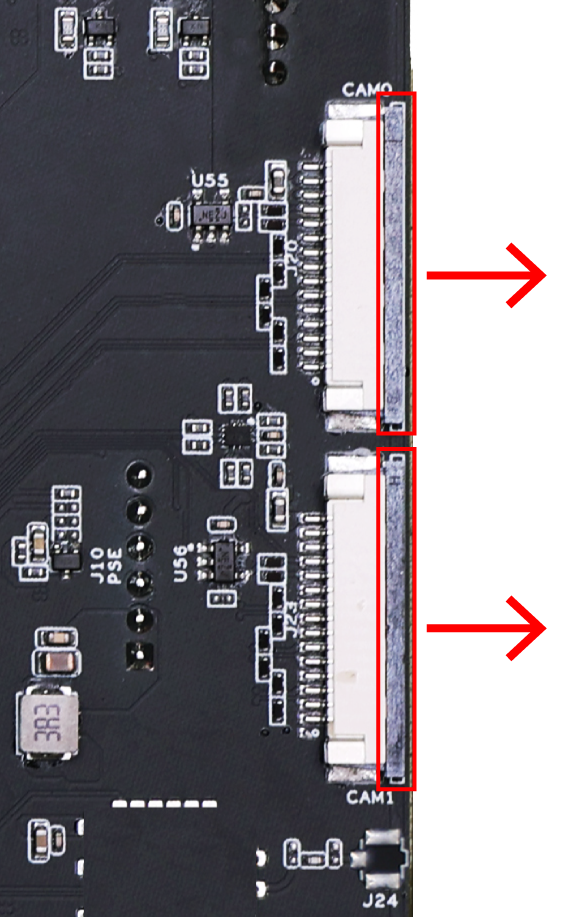
CSI 摄像头
reComputer Industrial 配备了 2 个 2 通道 15 针 MIPI CSI 摄像头连接器,支持以下摄像头:
-
IMX219 摄像头
-
IMX477 摄像头
连接概述
这里的 2 个 CSI 摄像头连接器标记为 CAM0 和 CAM1。您可以将一个摄像头连接到 2 个连接器中的任意一个,或者同时将 2 个摄像头连接到两个连接器上。
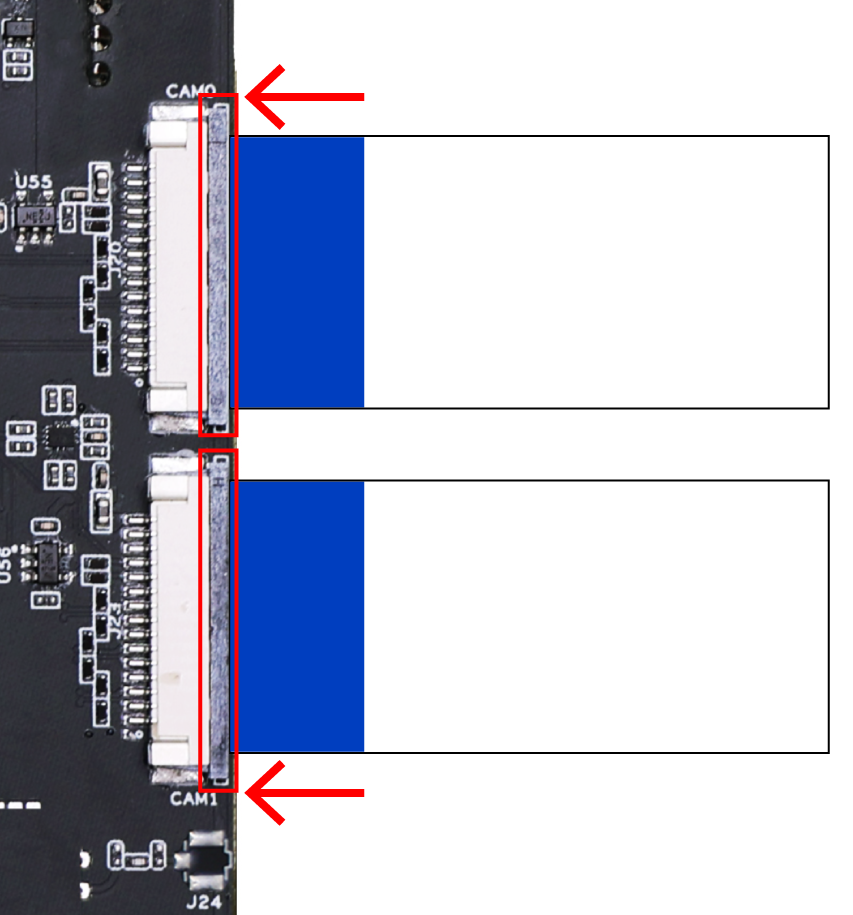
步骤 1: 轻轻拉出 CSI 连接器上的黑色锁扣
步骤 2: 将 15 针排线插入连接器,确保金手指朝下
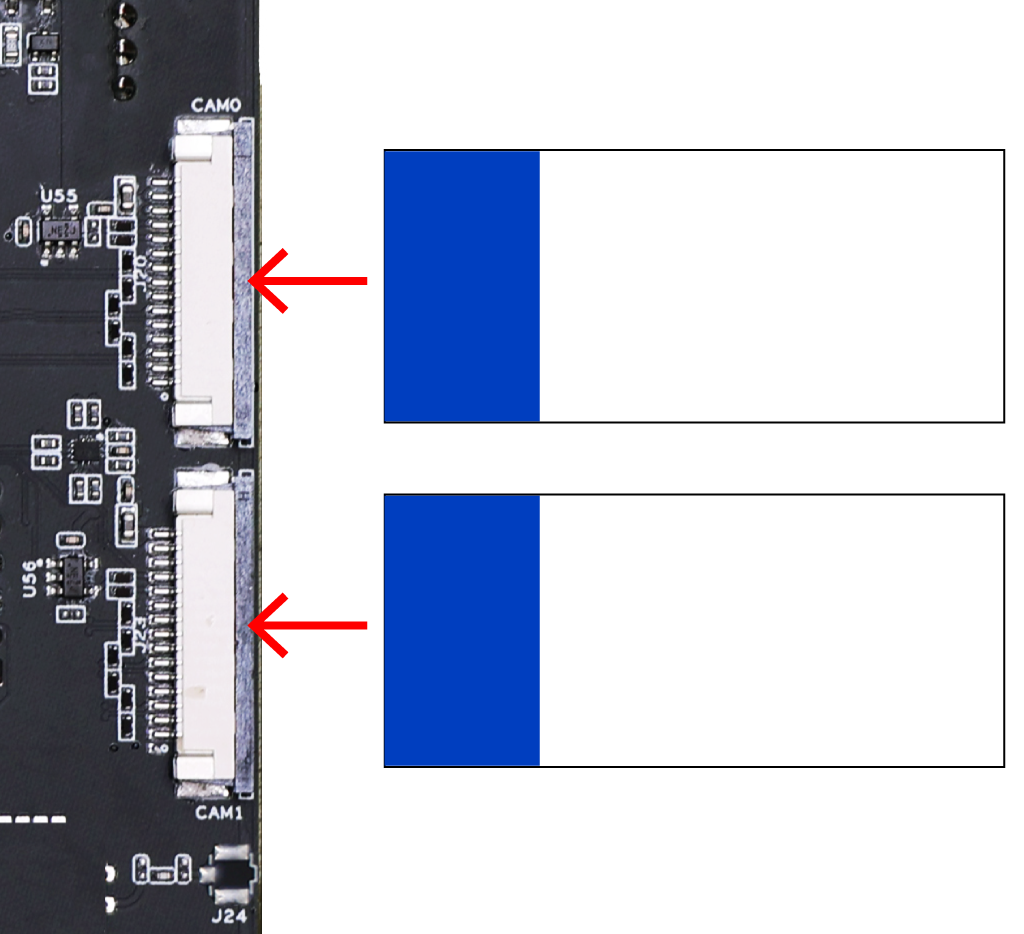
步骤 3: 推入黑色锁扣以将排线锁定到位
使用方法
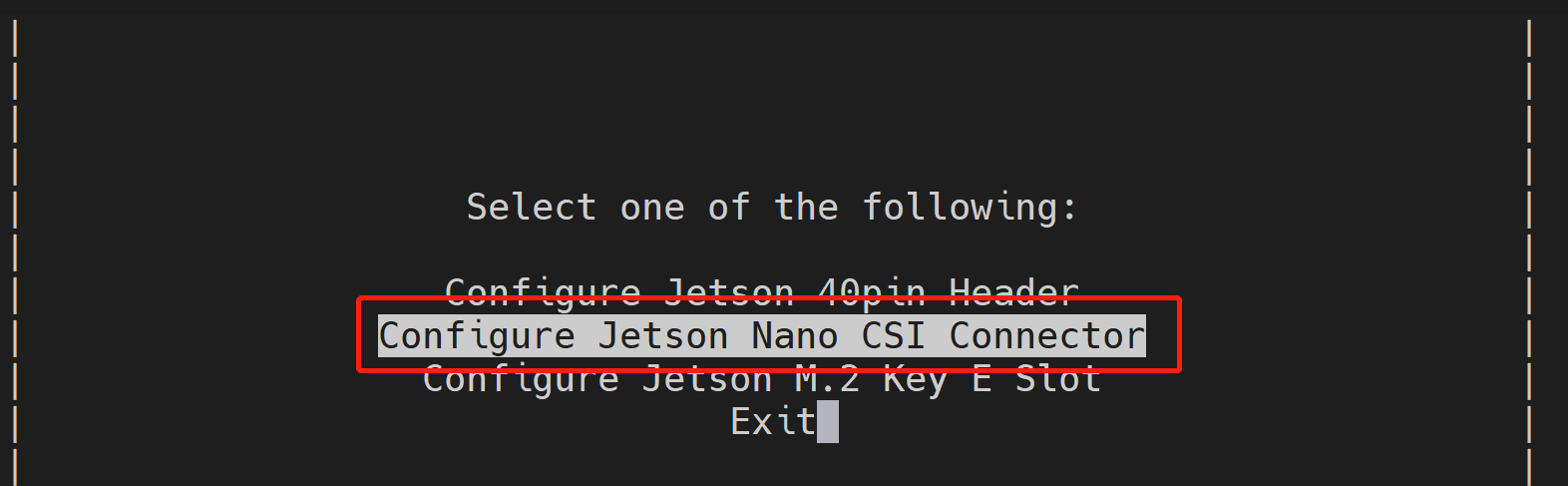
首先,您需要配置开发板以加载您将使用的特定摄像头的相应驱动程序。为此,JetPack 系统有一个内置工具来支持 IMX219 和 IMX477 摄像头。
步骤 1: 打开终端并执行以下命令
sudo /opt/nvidia/jetson-io/jetson-io.py
步骤 2: 选择 Configure Jetson Nano CSI Connector
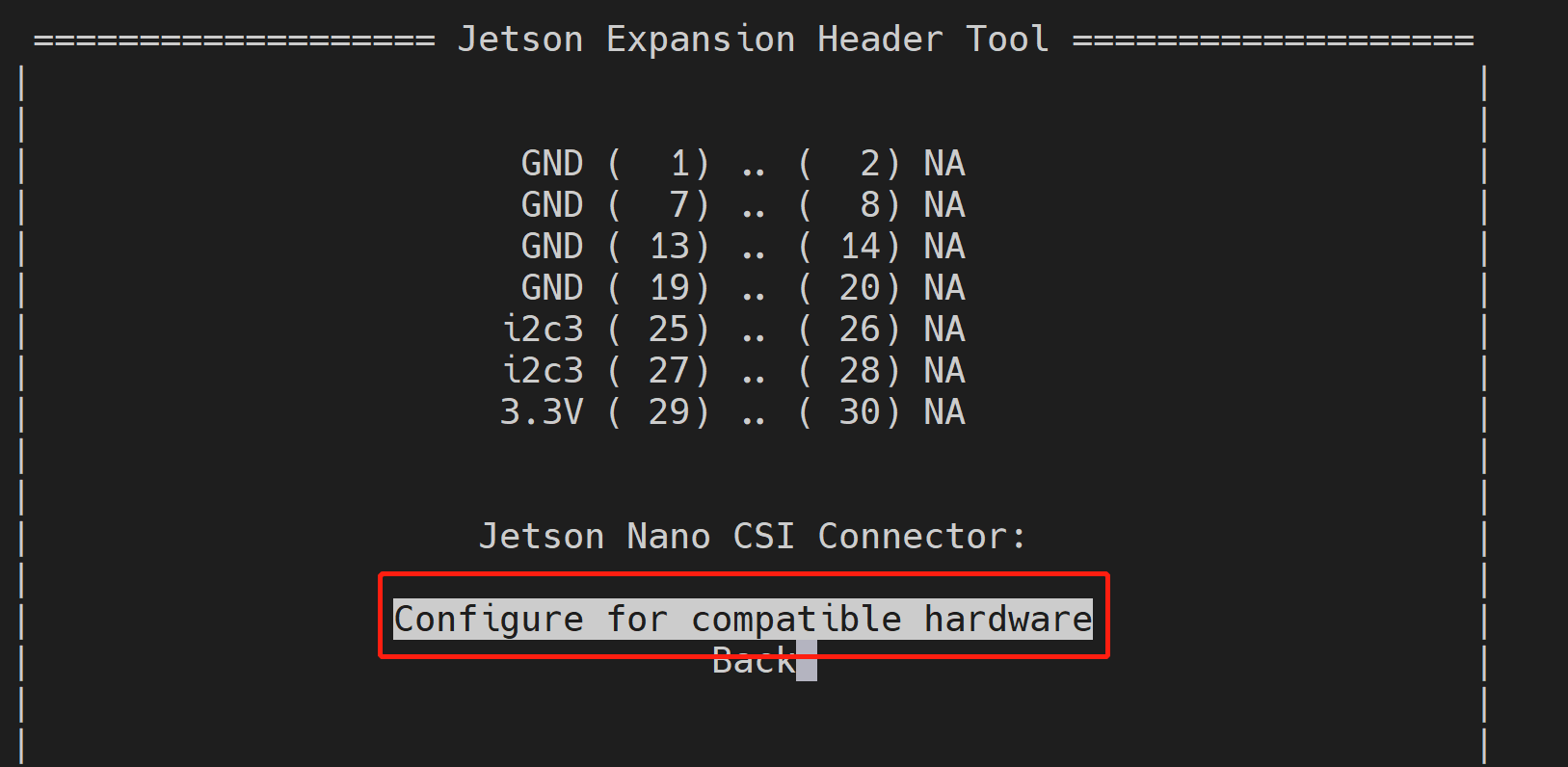
步骤 3: 选择 Configure for compatible hardware
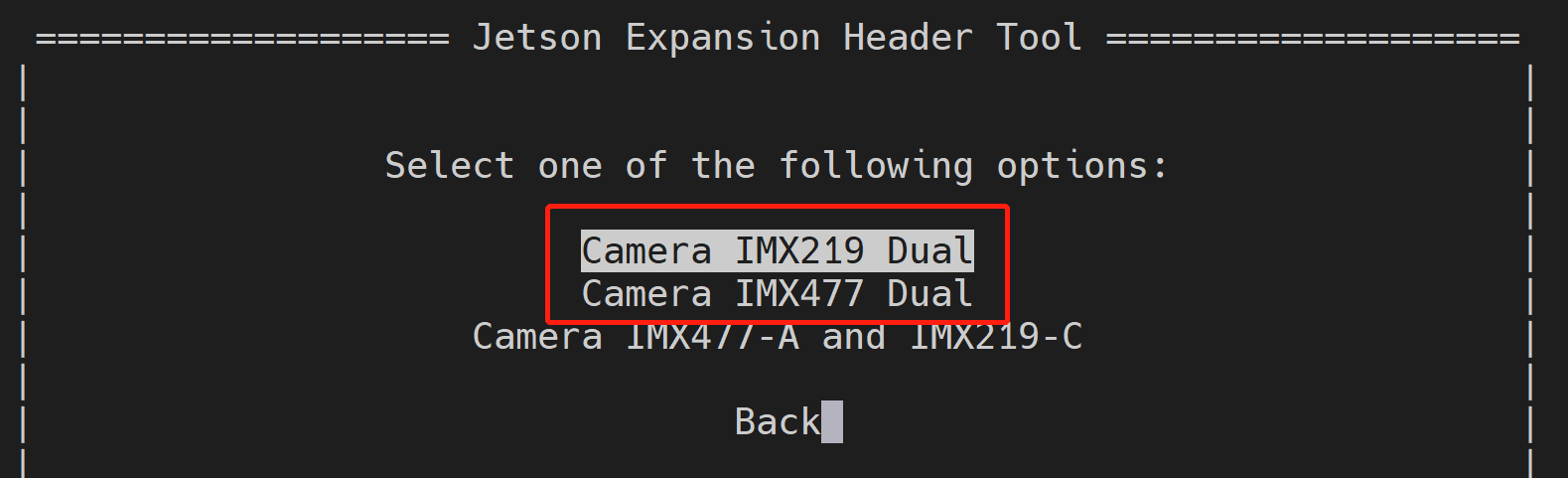
步骤 4: 选择您想要使用的摄像头
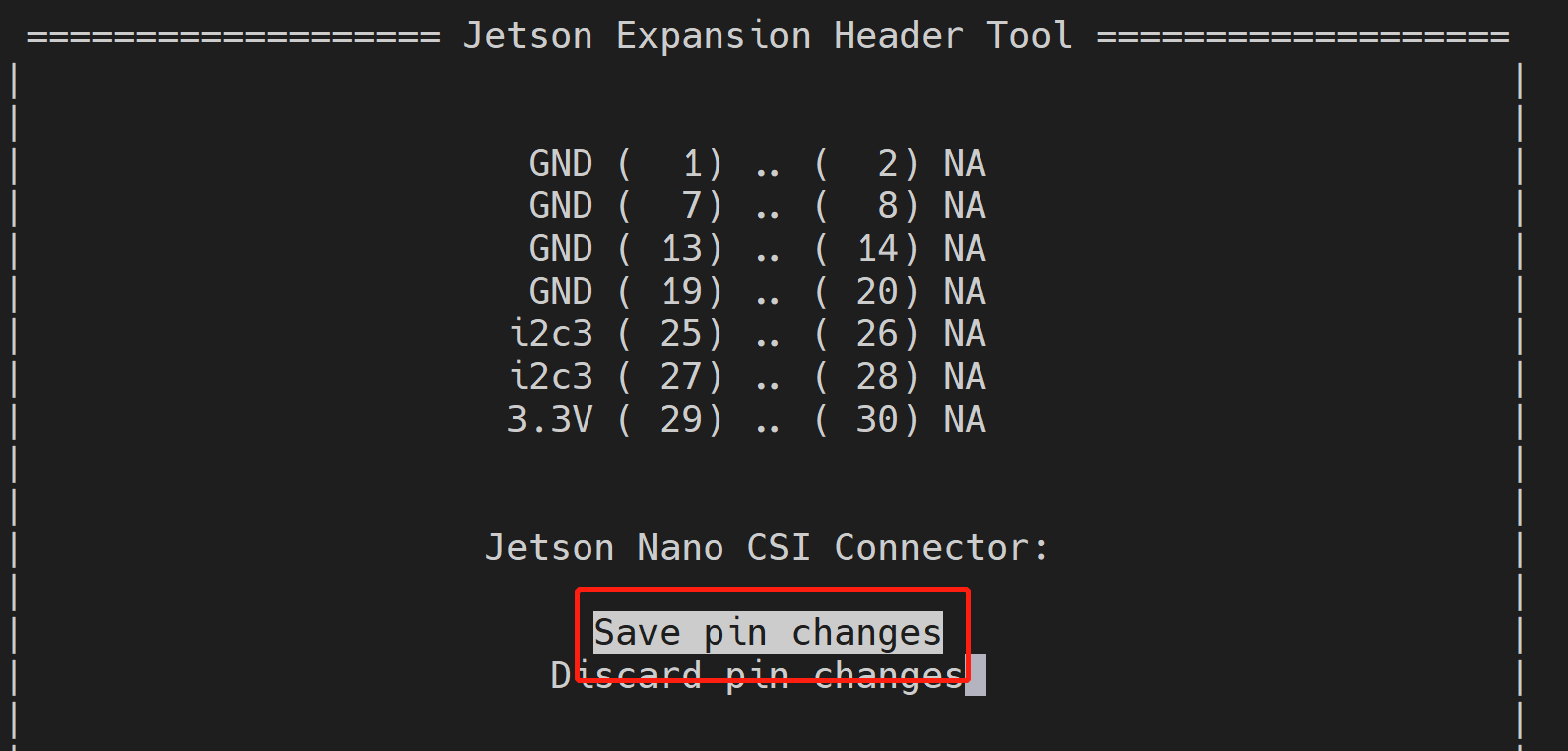
步骤 5: 选择 Save pin changes
步骤 6: 选择 Save and reboot to reconfigure pins
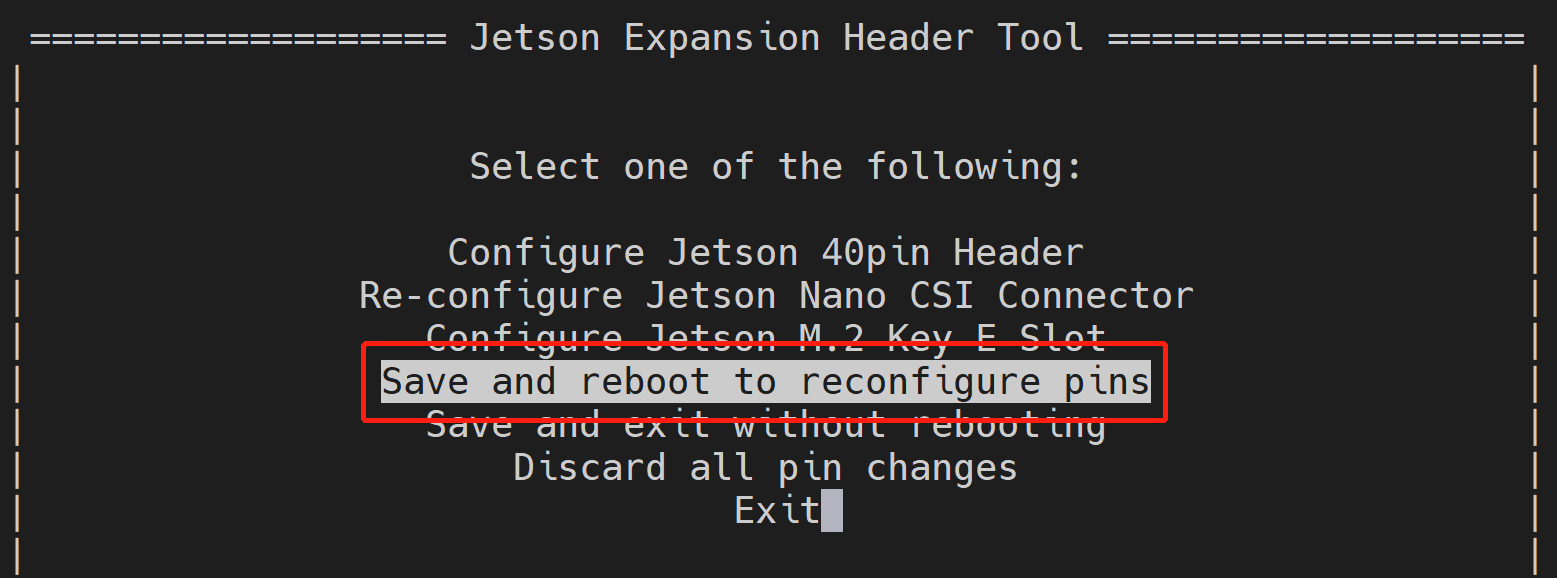
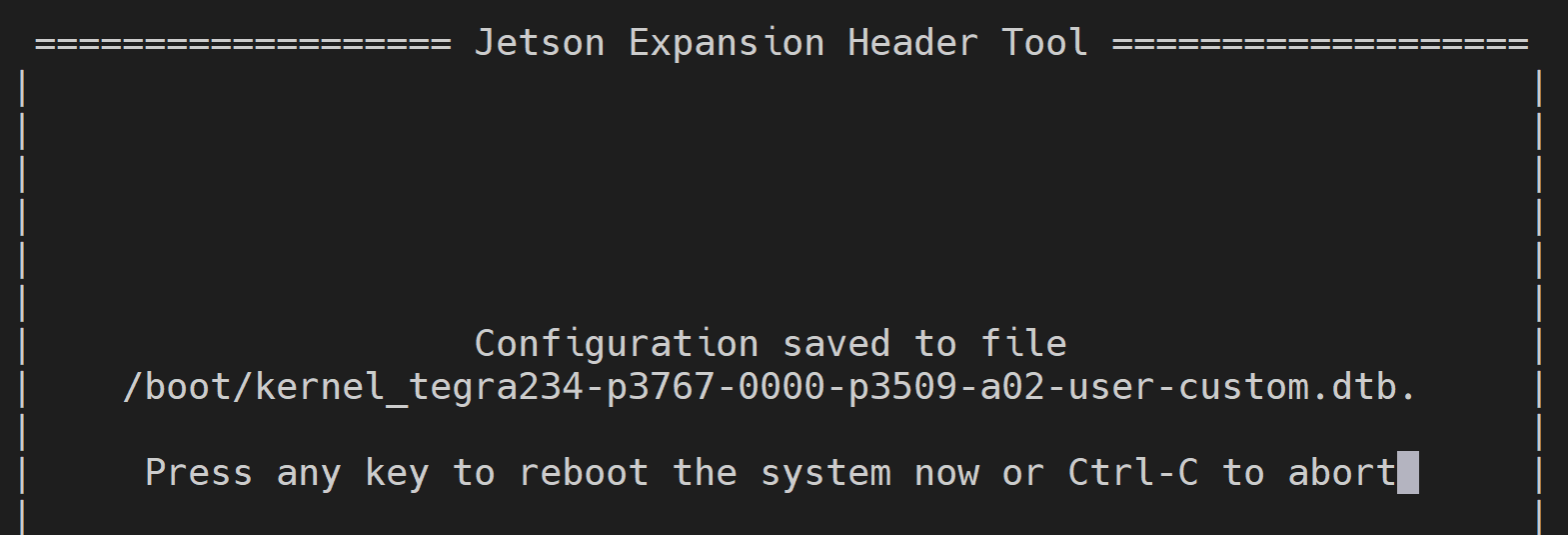
步骤 7: 在键盘上按任意键,设备将重启并应用摄像头配置
您可以通过 2 种不同的方法使用 CSI 摄像头。根据摄像头连接器按照以下命令操作。
- Method 1
- Method 2
对于 CAM0 端口
nvgstcapture-1.0 sensor-id=0
For CAM1 port
nvgstcapture-1.0 sensor-id=1
如果您想进一步更改相机设置,可以输入 "nvgstcapture-1.0 --help" 来访问所有可用的可配置选项
对于 CAM0 端口
gst-launch-1.0 nvarguscamerasrc sensor-id=0 sensor-mode=0 ! 'video/x-raw(memory:NVMM),width=1920, height=1080, framerate=20/1, format=NV12' ! nvvidconv ! xvimagesink
For CAM1 port
gst-launch-1.0 nvarguscamerasrc sensor-id=1 sensor-mode=0 ! 'video/x-raw(memory:NVMM),width=1920, height=1080, framerate=20/1, format=NV12' ! nvvidconv ! xvimagesink
如果您想进一步更改相机设置,可以更新参数,如 width、height、framerate、format 等。
RTC
reComputer Industrial 配备了 2 种不同的方式来连接 RTC 电池
连接概述
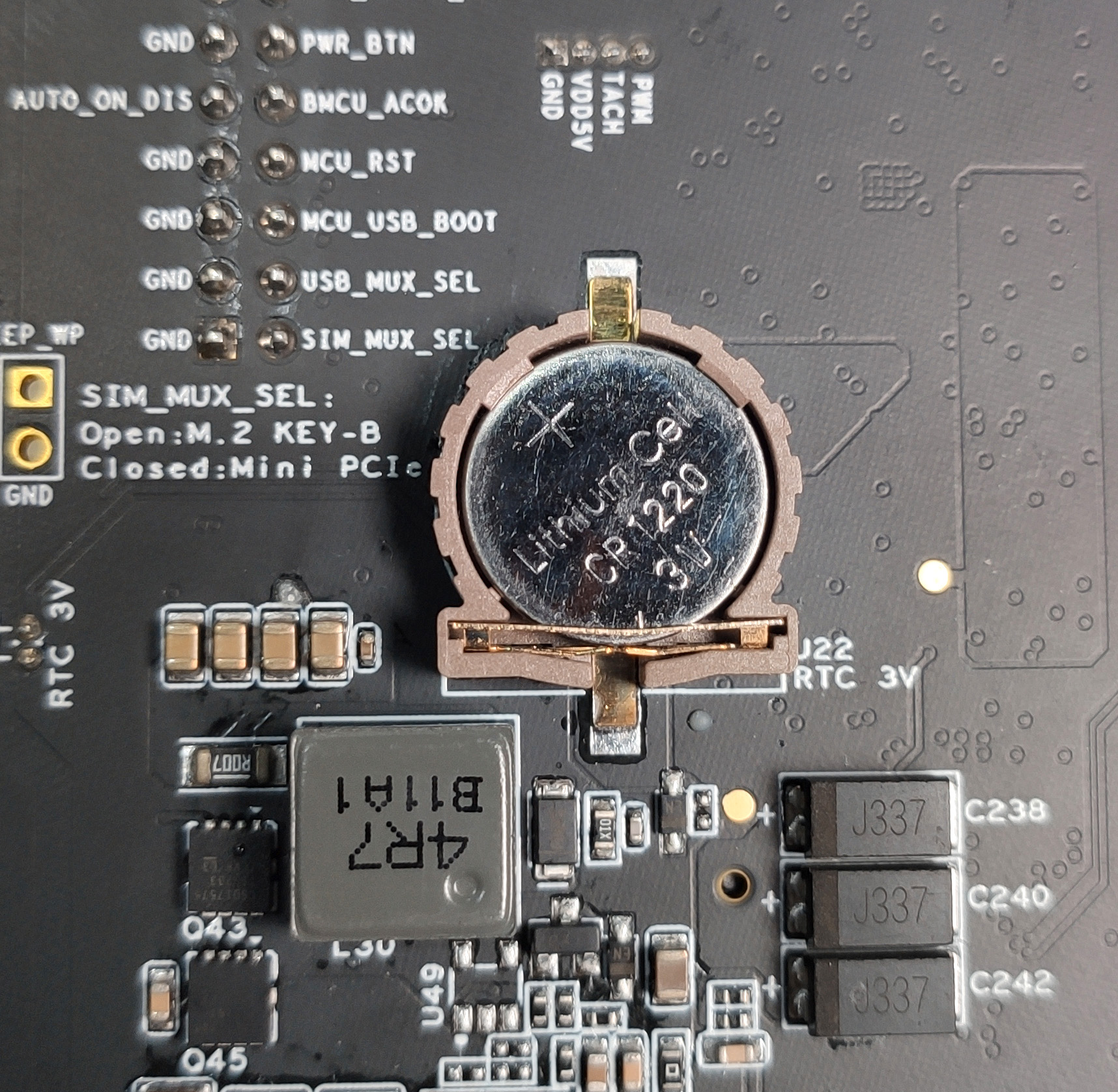
- 方法 1:
将 3V CR1220 纽扣电池 连接到板上的 RTC 插座,如下所示。确保电池的 正极 (+) 端朝上
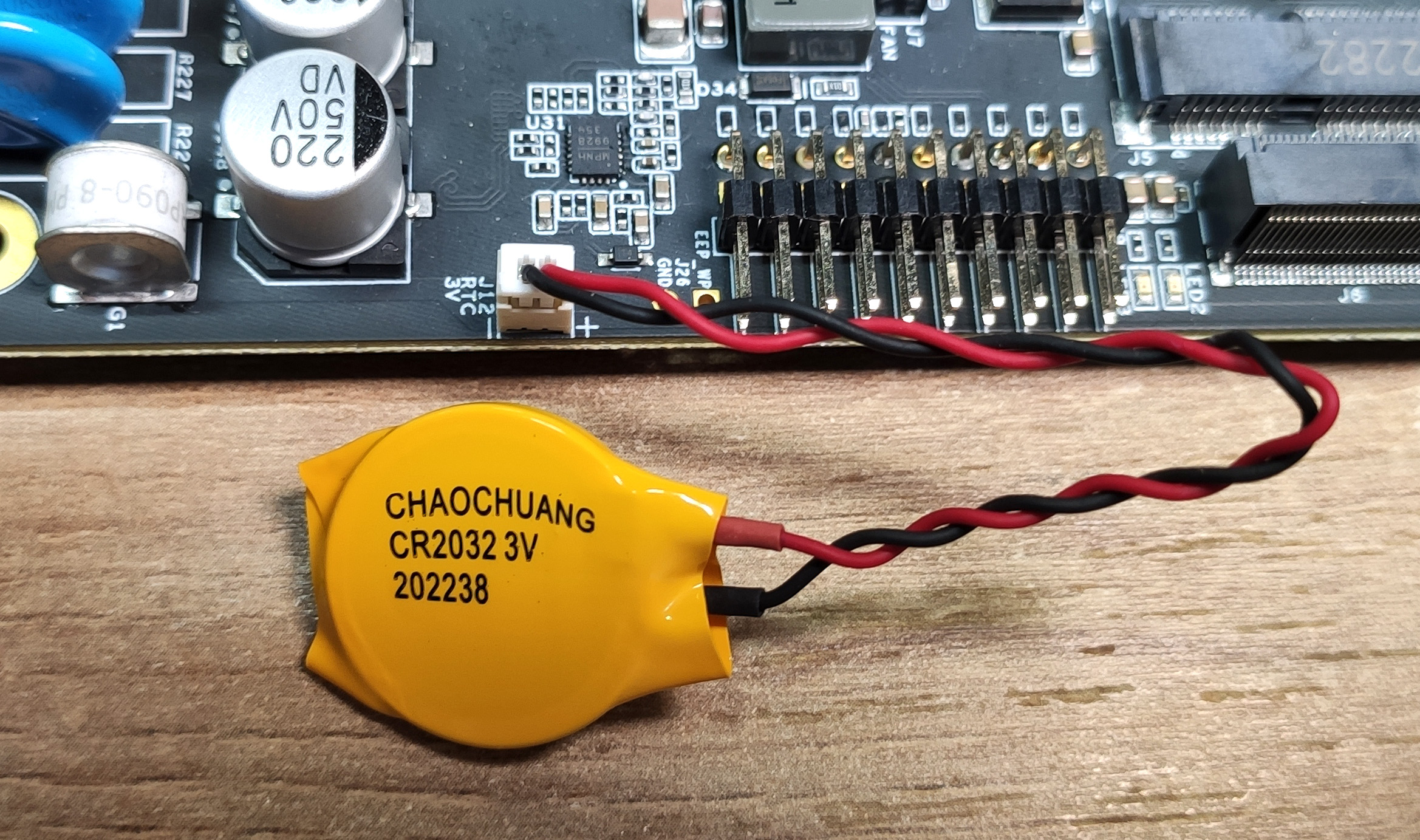
- 方法 2:
将 带 JST 连接器的 3V CR2302 纽扣电池 连接到板上的 2 针 1.25mm JST 插座,如下所示
使用方法
请注意,如果您的 reComputer 设备已经更新到 JetPack 6 或更高版本,RTC 将正常工作,无需任何额外配置。如果您使用的是 JetPack 5,您需要参考以下内容来配置时钟同步服务。
步骤 1: 按照上述方法连接 RTC 电池
步骤 2: 打开 reComputer Industrial
步骤 3: 在 Ubuntu 桌面上,点击右上角的下拉菜单,导航到 Settings > Date & Time,通过以太网电缆连接到网络,并选择 Automatic Date & Time 以自动获取日期/时间

如果您没有通过以太网连接到互联网,可以在此处手动设置日期/时间
步骤 4: 打开终端窗口,执行以下命令检查硬件时钟时间
sudo hwclock
您将看到类似下面的输出,这不是正确的日期/时间

步骤 5: 通过输入以下命令将硬件时钟时间更改为当前系统时钟时间
sudo hwclock --systohc
步骤 6: 移除任何连接的以太网电缆,确保它不会从互联网获取时间,然后重启开发板
sudo reboot
步骤 7: 检查硬件时钟时间,以验证即使设备断电后日期/时间仍保持不变
现在我们将创建一个脚本,在每次启动时始终从硬件时钟同步系统时钟。
步骤 8: 使用您偏好的任何文本编辑器创建一个新的 shell 脚本。这里我们使用 vi 文本编辑器
sudo vi /usr/bin/hwtosys.sh
步骤 9: 按下 i 进入插入模式,复制并粘贴以下内容到文件中
#!/bin/bash
sudo hwclock --hctosys
步骤 10: 使脚本可执行
sudo chmod +x /usr/bin/hwtosys.sh
步骤 11: 创建一个 systemd 文件
sudo nano /lib/systemd/system/hwtosys.service
步骤 12: 在文件内添加以下内容
[Unit]
Description=Change system clock from hardware clock
[Service]
ExecStart=/usr/bin/hwtosys.sh
[Install]
WantedBy=multi-user.target
步骤 13: 重新加载 systemctl 守护进程
sudo systemctl daemon-reload
步骤 14: 启用新创建的服务在系统启动时自动启动,并启动该服务
sudo systemctl enable hwtosys.service
sudo systemctl start hwtosys.service
步骤 15: 验证脚本作为 systemd 服务正在运行
sudo systemctl status hwtosys.service
步骤 16: 重启开发板,您将看到系统时钟现在与硬件时钟同步
M.2 Key M
开箱即用,reComputer Industrial 包含一个连接到 M.2 Key M 插槽的 128GB SSD,预装了 JetPack 系统。
连接概述
如果您想要移除包含的 SSD 并安装新的 SSD,可以按照以下步骤操作。这里我们只推荐使用 Seeed 的 128GB、256GB 和 512GB 存储容量的 SSD,因为我们只测试过这些 SSD。此外,此接口支持 PCIe Gen4.0 SSD。
- 步骤 1: 移除预装的 SSD 螺丝

- 步骤 2: 通过从 SSD 连接器滑出来移除 SSD

- 步骤 3: 插入新的 SSD 并重新拧紧螺丝
使用方法
我们将解释如何对连接的 SSD 进行简单的基准测试
- 步骤 1: 通过执行以下命令检查写入速度
sudo dd if=/dev/zero of=/home/nvidia/test bs=1M count=512 conv=fdatasync
- 步骤 2: 通过执行以下命令检查读取速度。确保在执行上述写入速度命令后再执行此命令。
sudo sh -c "sync && echo 3 > /proc/sys/vm/drop_caches"
sudo dd if=/home/nvidia/test of=/dev/null bs=1M count=512
mini PCIe
reComputer Industrial 配备了一个 mini PCIe 连接器,支持 4G 和 LoRa 模块。但是,您一次只能连接 4G 模块或 LoRa 模块中的一个。
4G 模块连接概述
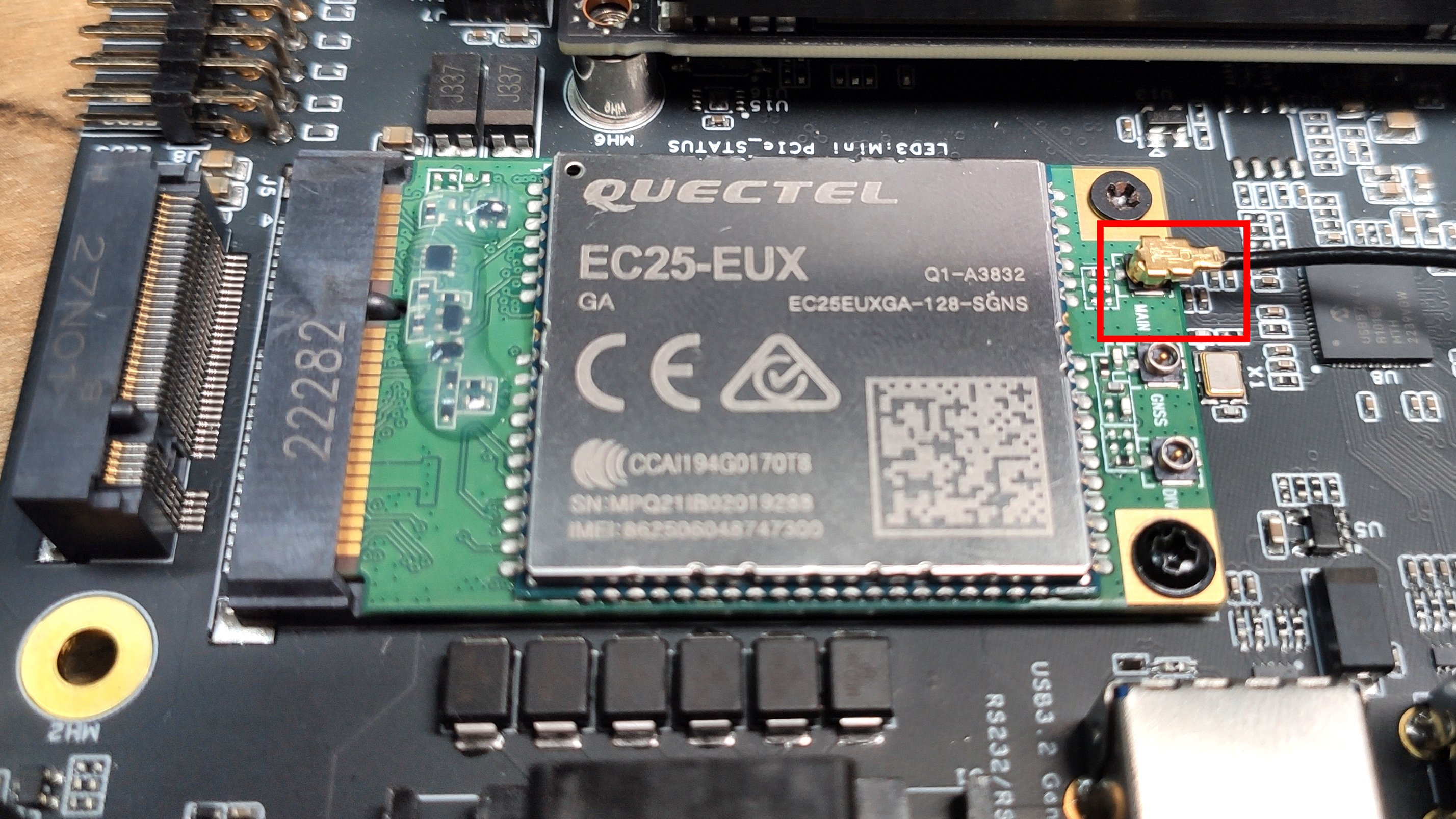
目前该板支持 EC25EUXGA 和 EC20CEHCLG 模块。
-
步骤 1: 如果板子已经开机,请先关闭电源
-
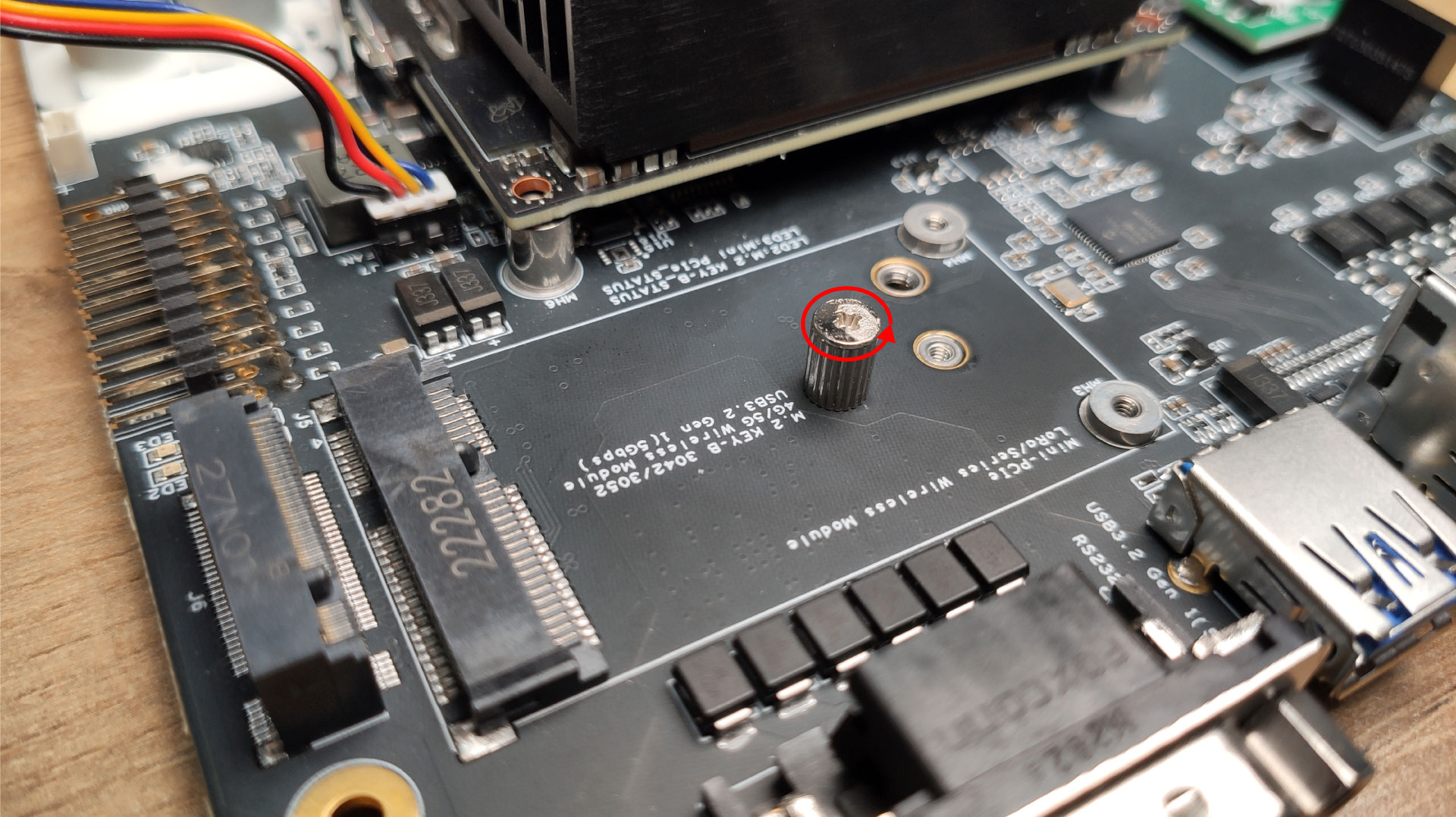
步骤 2: 移除附带的支撑柱。该支撑柱仅在使用 M.2 Key B 接口时需要
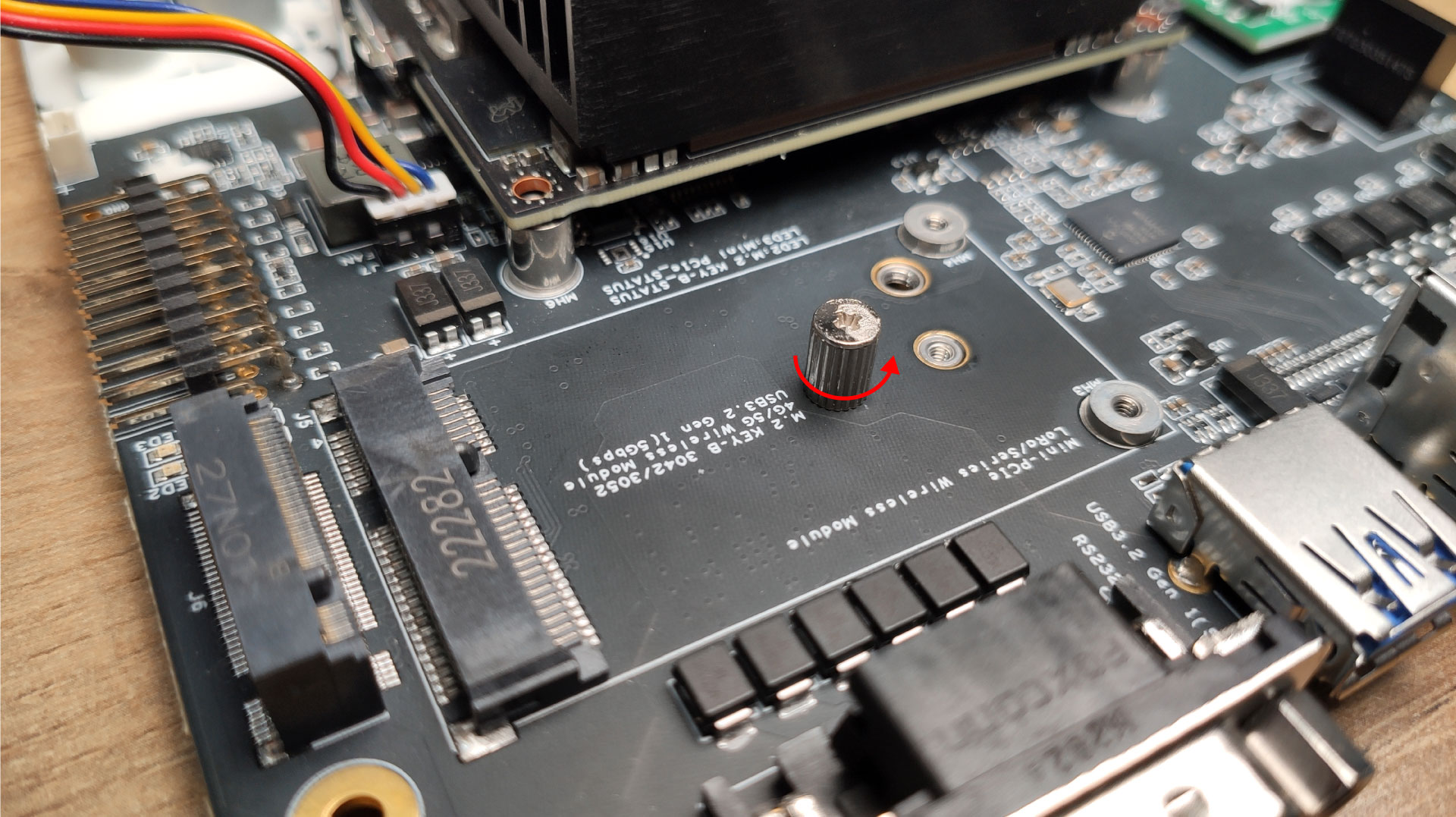
- 步骤 3: 将 4G 模块滑入 mini PCIe 插槽,使用预装的螺丝将其固定到 2 个孔中以固定 4G 模块

- 步骤 4: 将天线连接到标有 MAIN 的天线连接器。这里您需要使用 IPEX 连接器
- 步骤 5: 将支持 4G 的 nano SIM 卡插入板上的 SIM 卡插槽,确保 SIM 卡的金色表面朝下。这里要将卡完全插入,使其撞击内部弹簧后弹回并锁定到位。
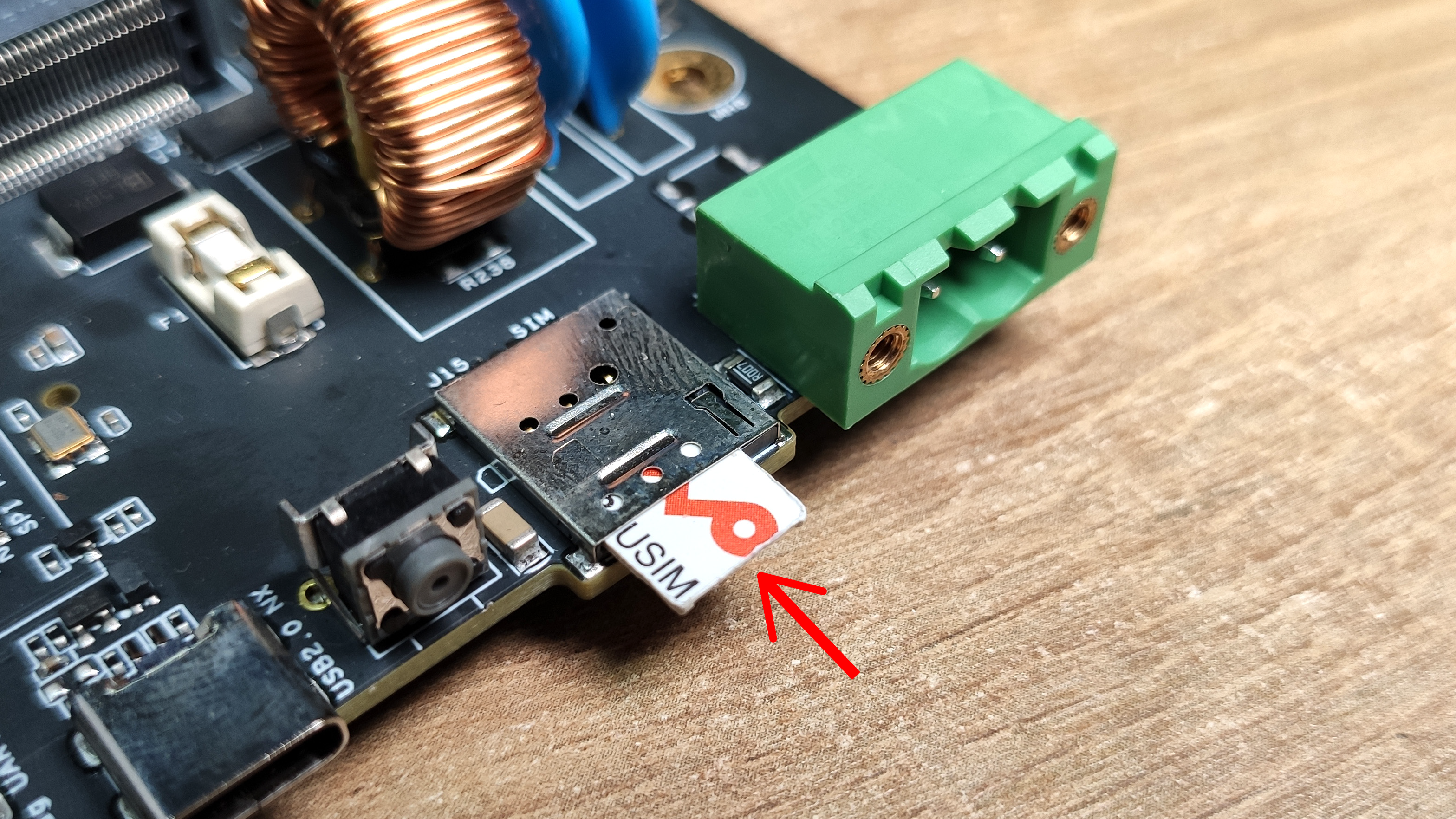
如果您想要取出 SIM 卡,请将卡推入以撞击内部弹簧,这样 SIM 卡就会从插槽中弹出
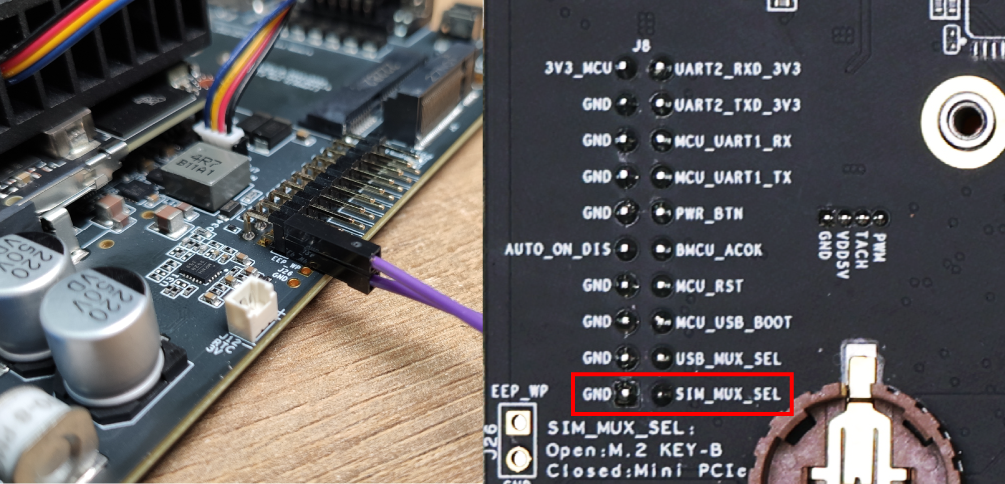
- 步骤 6: 在 J8 (Control and UART) Header 上的 SIM_MUX_SEL 和 GND 引脚之间添加跳线
- 步骤 6: 开启板子电源
4G 模块使用 - 测试拨号
使用 EC25 模块时,模块会自动启动并准备使用。但是,使用 EC20 模块时,您需要重置模块才能使其工作
步骤 1: 如果您使用的是 EC25 模块,可以跳过此步骤。但如果您使用的是 EC20 模块,请输入以下命令来访问 GPIO309 引脚,该引脚负责重置 4G 模块。
- Jetpack5
- Jetpack6
sudo su
cd /sys/class/gpio
echo 309 > export
cd gpio309
echo out > direction
echo 1 > value
sudo gpioset --mode=wait gpiochip2 9=1
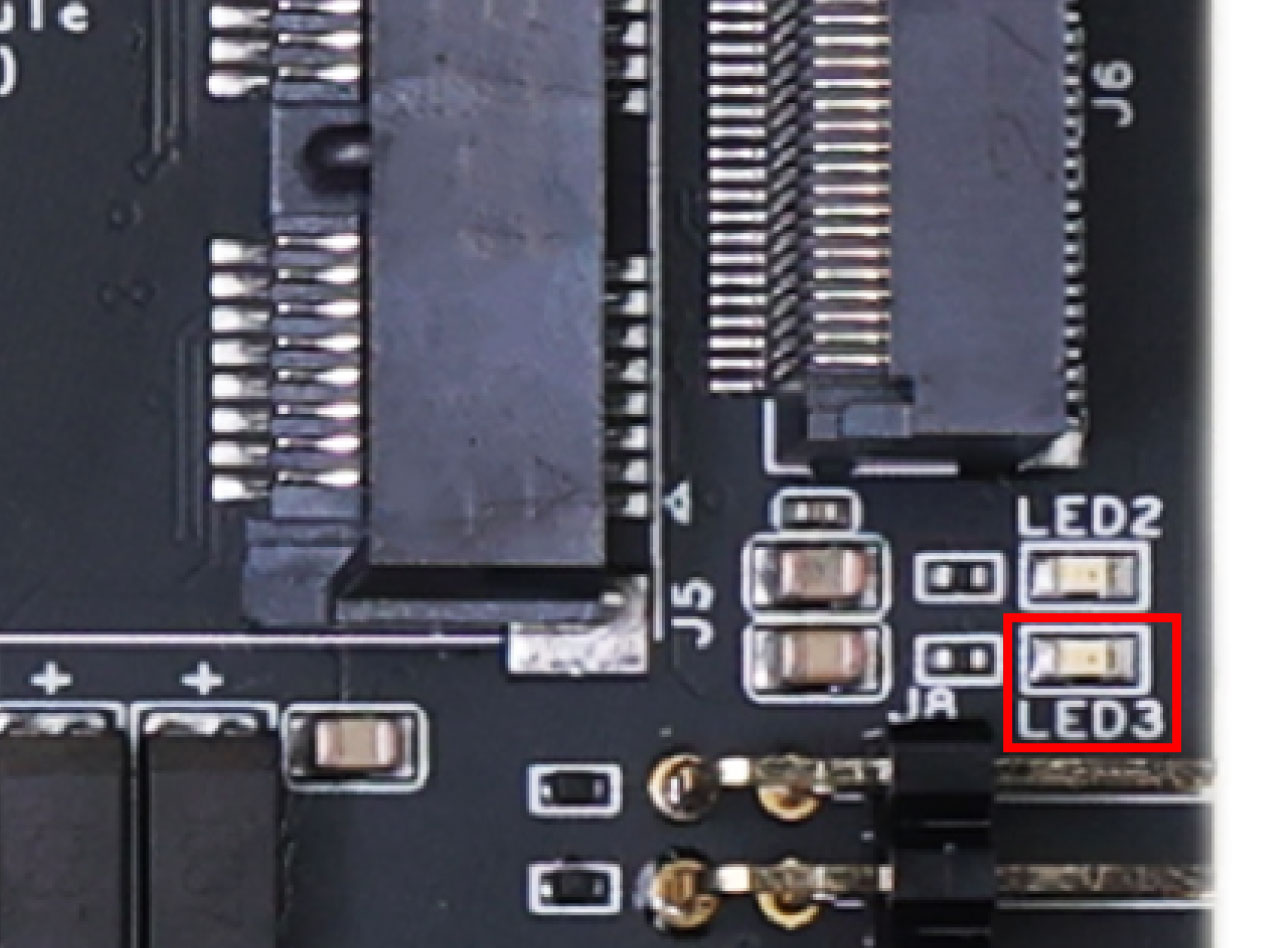
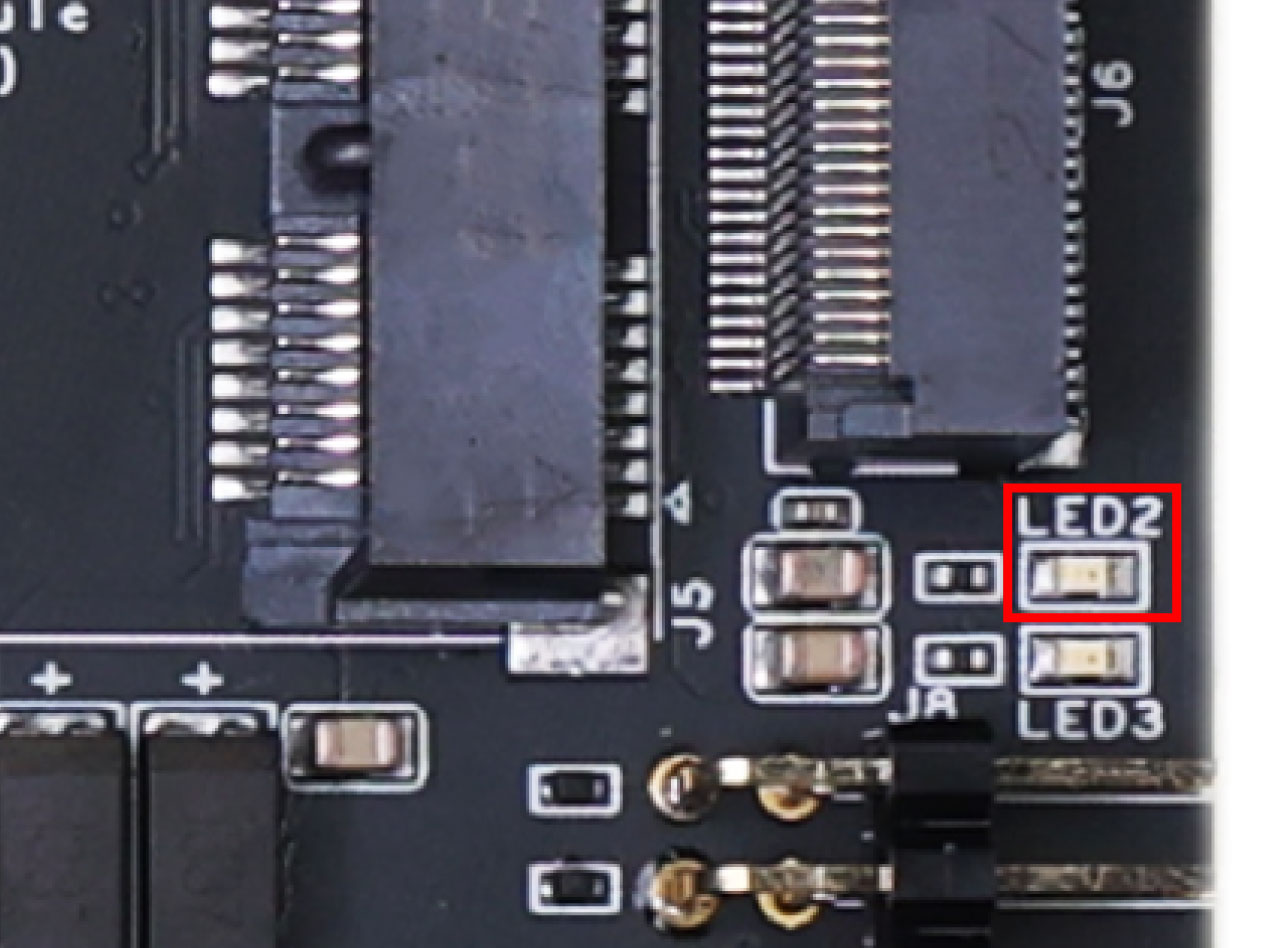
对于 EC25 模块,LED2 将在板子启动后立即亮起绿灯。对于 EC20 模块,LED2 将在按照上述说明重置模块后亮起绿灯
步骤 2: 安装 minicom
sudo apt update
sudo apt install minicom -y
步骤 3: 进入已连接的 4G 模块的串口控制台,这样我们就可以输入 AT 命令并与 4G 模块进行交互
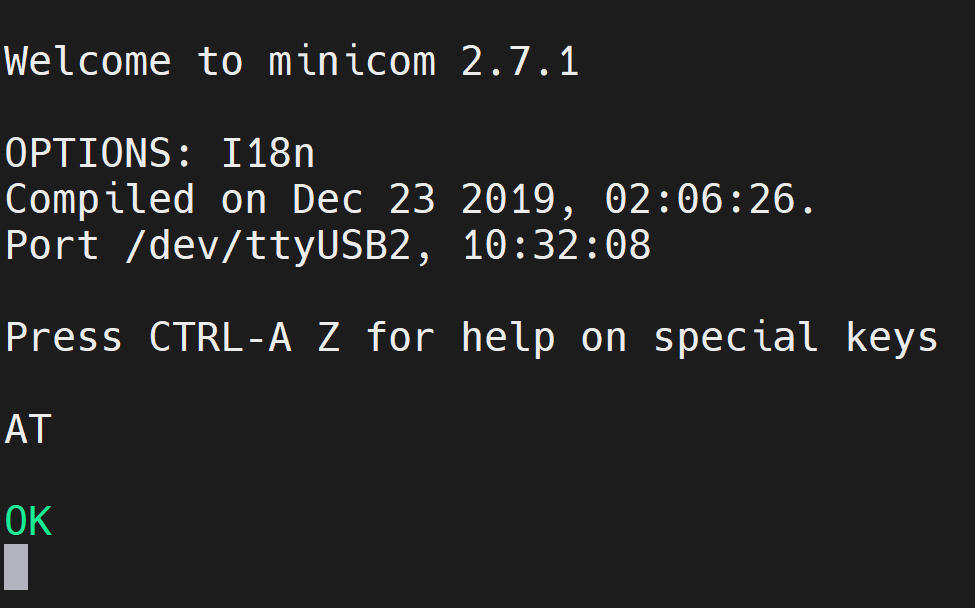
sudo minicom -D /dev/ttyUSB2 -b 115200
步骤 4: 按 Ctrl+A,然后按 E 开启本地回显
步骤 5: 输入命令 "AT" 并按回车键。如果看到响应为 "OK",则 4G 模块工作正常
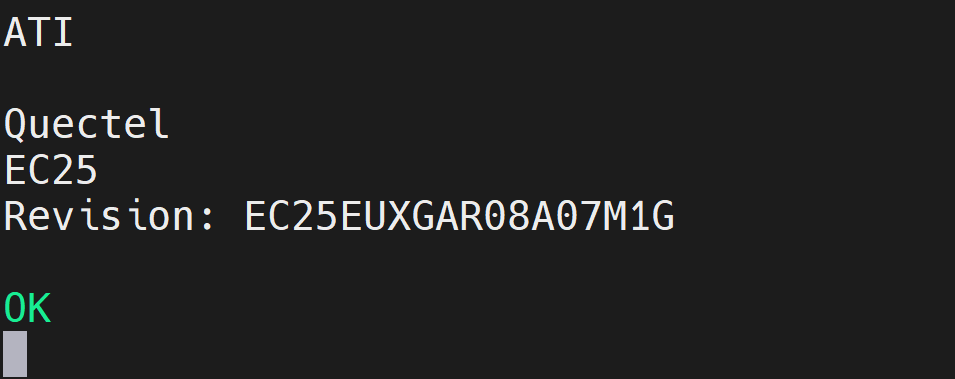
步骤 6: 输入命令 "ATI" 检查模块信息
步骤 7: 要测试模块,输入以下命令拨打另一个电话号码
ATD<phone_number>;
您将看到以下输出
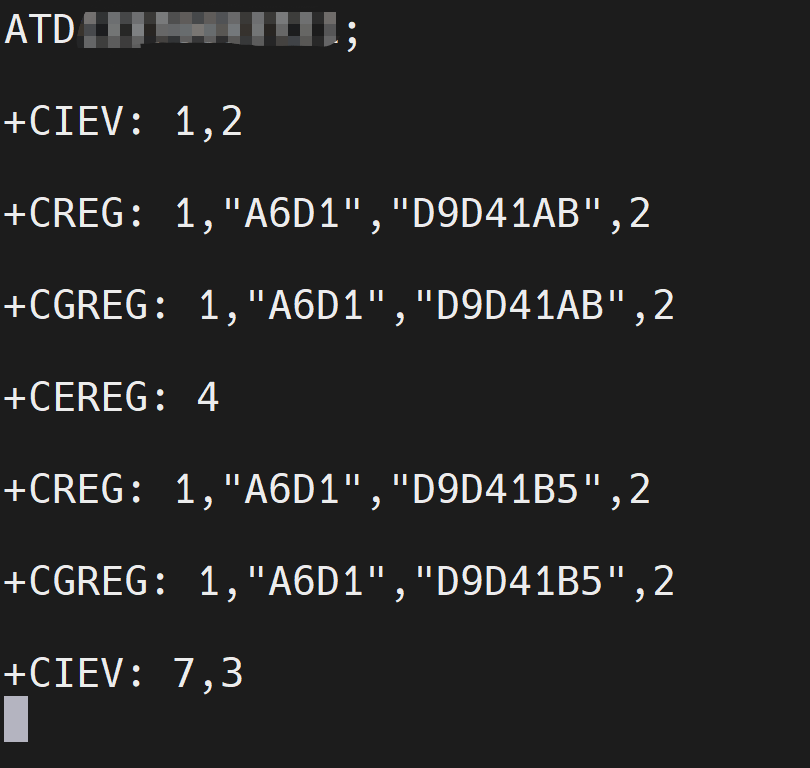
如果输入的电话号码能够接收到呼叫,则模块工作正常
4G 模块使用 - 连接到互联网
EC25 模块
如果您使用的是 EC25 模块,请按照以下步骤操作
- 步骤 1: 按照上述说明打开 4G 模块的串口控制台(4G 模块使用 - 测试拨号部分)后,执行以下命令连接到互联网。这里请将 YOUR_APN 替换为您的网络运营商的 APN
AT+CGDCONT=1,"IP","YOUR_APN"
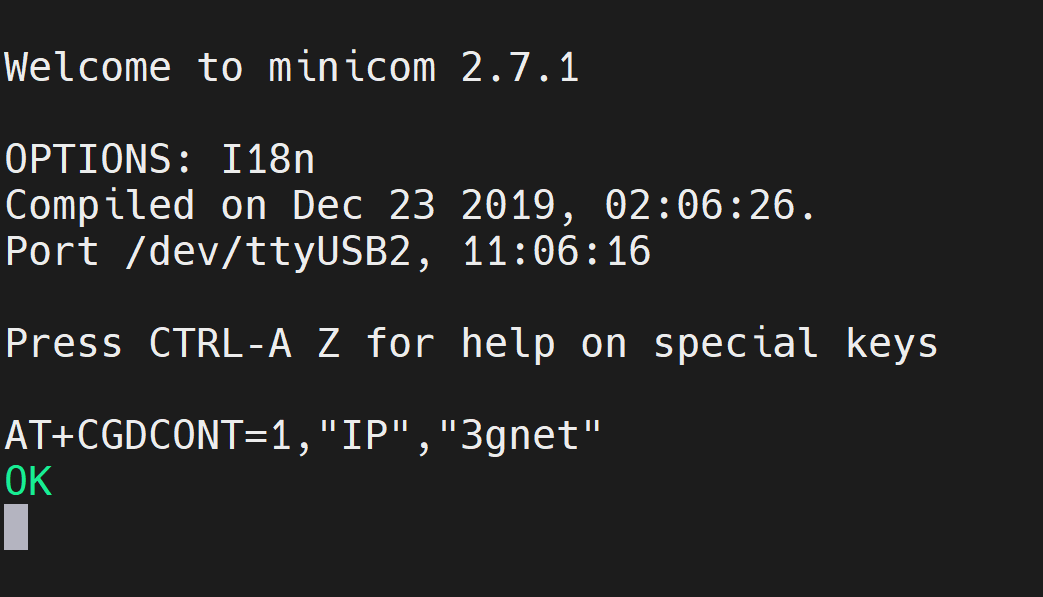
连接成功后,应该输出 OK,如上图所示
- 步骤 2: 通过执行以下命令重启 4G 模块
AT+CFUN=1,1
现在您将在串口终端上失去与4G模块的连接
-
步骤 3: 按 CTRL + A 然后按 Q 关闭 minicom
-
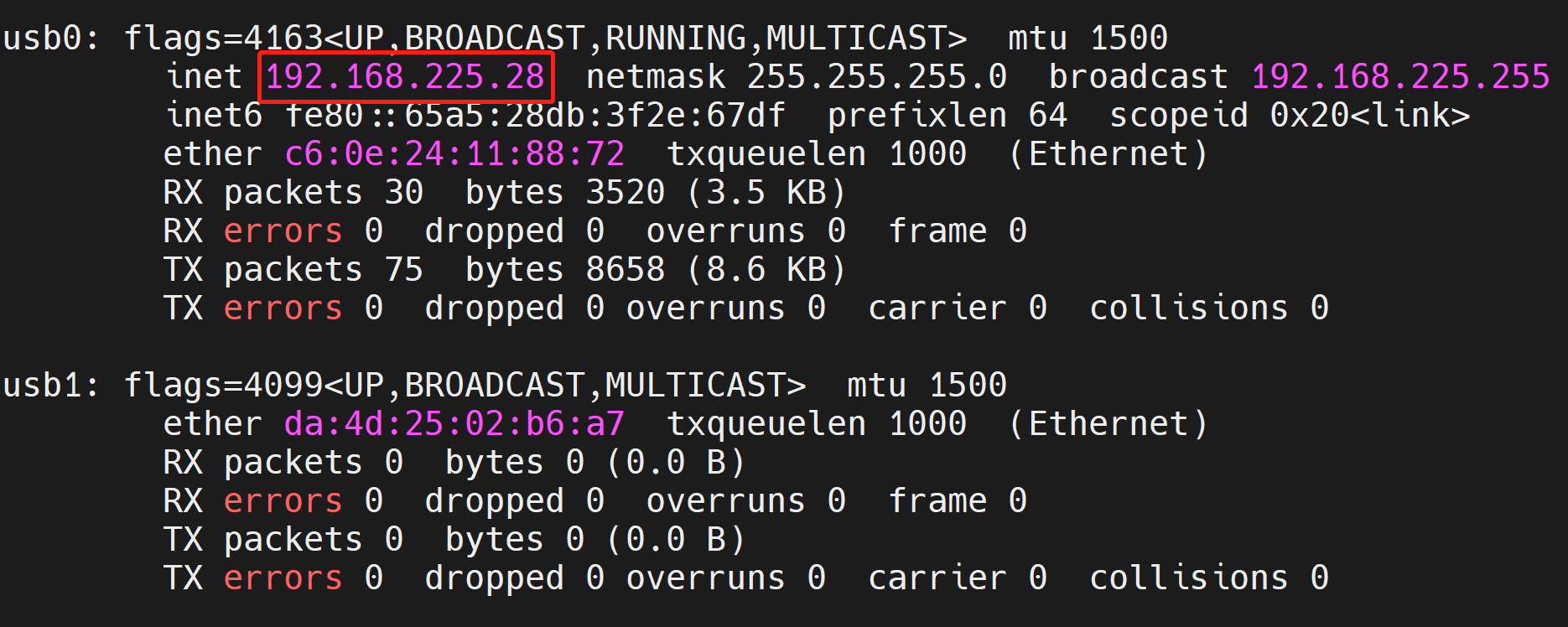
步骤 4: 输入 ifconfig,您将在 usb0 接口上看到一个IP地址
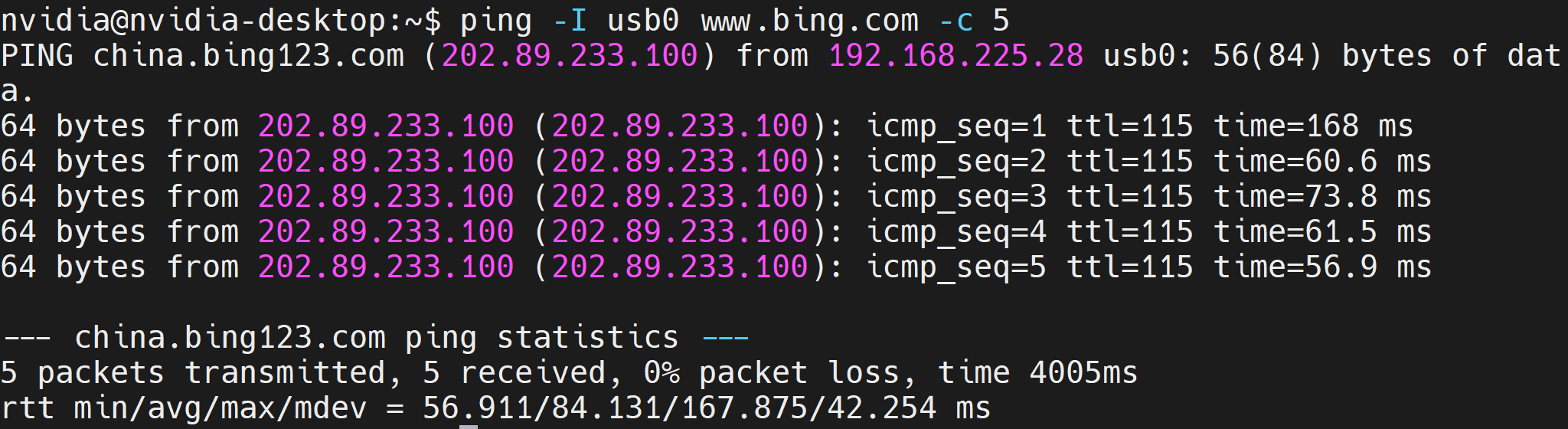
- 步骤 5: 您可以尝试ping一个网站来检查是否有互联网连接,如下所示
ping -I usb0 www.bing.com -c 5
EC20 模块
如果您使用的是 EC20 模块,请按照以下步骤操作
-
步骤 1: 如果您已经按照前面章节(4G 模块使用 - 测试拨号章节)中针对 EC20 模块的说明重置了 4G 模块,您可以跳过此步骤。但是,如果您尚未完成此操作,请现在执行
-
步骤 2: 进入 4G 模块的串口控制台,输入以下命令设置为 ECM 模式
AT+QCFG="usbnet",1
-
步骤 3: 重置 4G 模块
-
步骤 4: 在 4G 模块控制台内,执行以下命令连接到互联网。这里将 YOUR_APN 替换为您网络提供商的 APN
AT+CGDCONT=1,"IP","YOUR_APN"
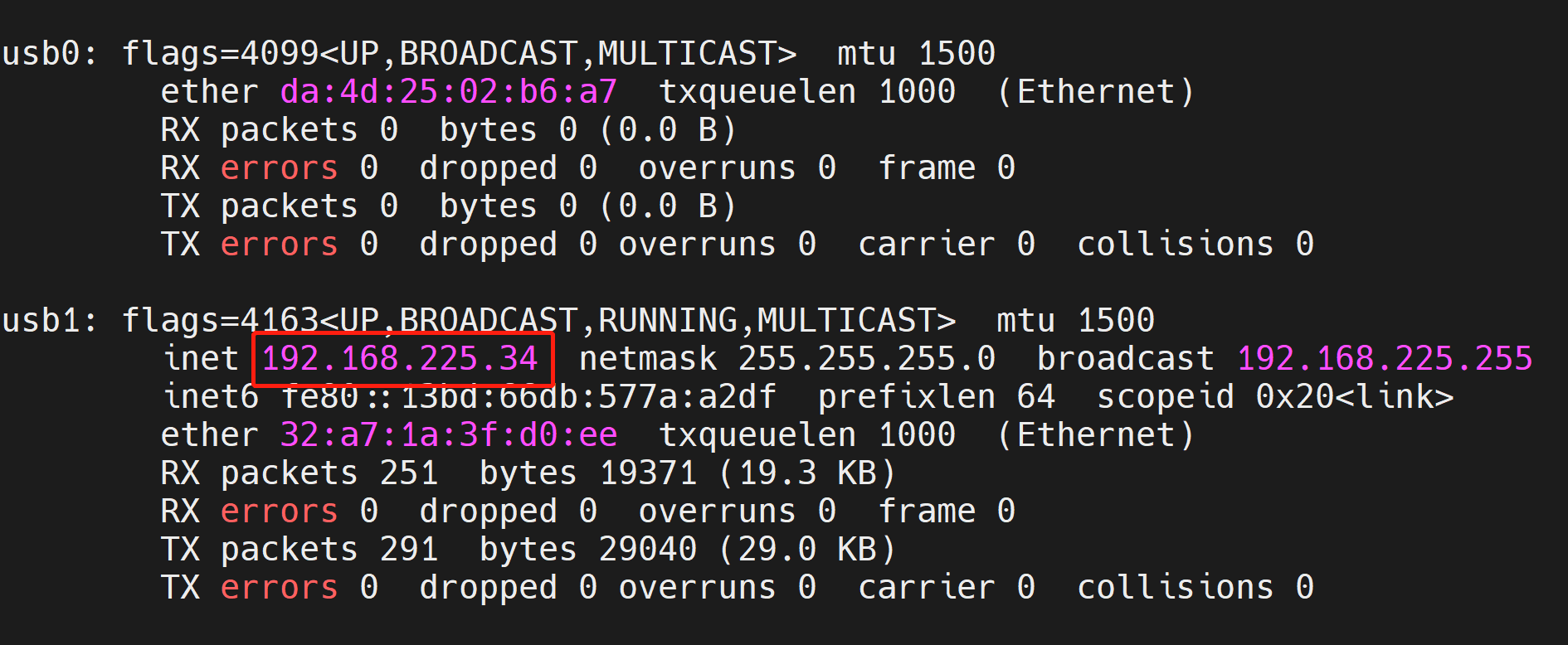
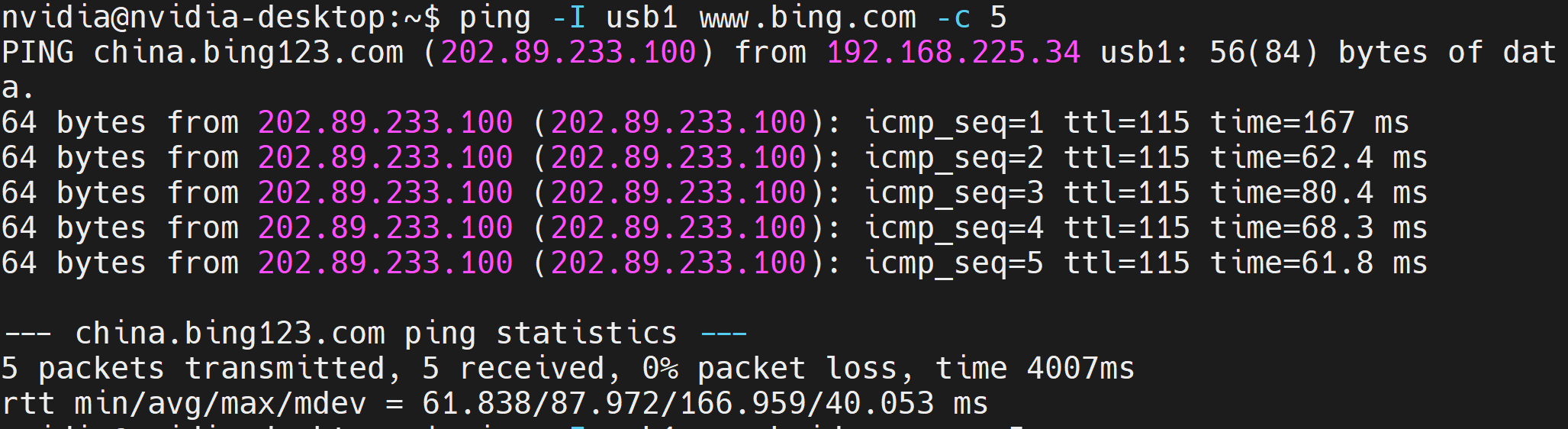
- 步骤 6: 输入 ifconfig,您将在 usb1 接口上看到一个 IP 地址
- 步骤 7: 您可以尝试 ping 一个 URL 来检查是否有互联网连接,如下所示
LoRa 模块连接概述
目前该板支持 WM1302 SPI 模块。您可以使用我们商城上提供的美国版本或欧洲版本。
-
步骤 1: 如果板子已经开机,请先关机
-
步骤 2: 将 LoRa 模块滑入 mini PCIe 插槽,使用预装的螺丝将其固定到 2 个孔上,以确保 4G 模块牢固就位

- 步骤 3: 将天线连接到天线连接器。这里您需要使用 IPEX 连接器

确保在 J8(控制和 UART)接头上的 SIM_MUX_SEL 和 GND 引脚之间没有跳线。此跳线仅在使用 4G 模块时需要
- 步骤 4: 给板子上电
LoRa 模块使用 - 测试 LoRa RF
当 LoRa 模块连接后,您将看到模块上的绿色和蓝色 LED 灯亮起

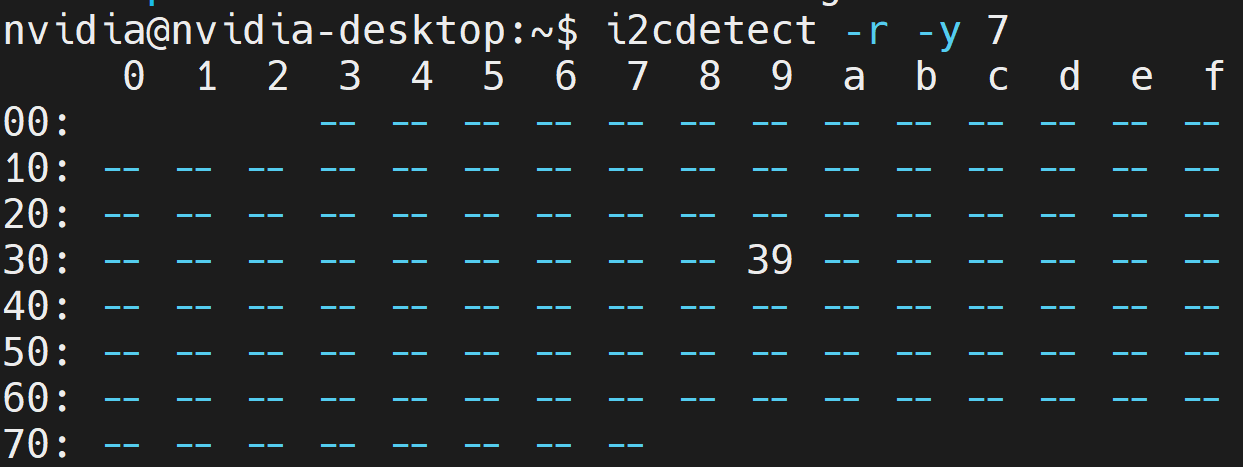
- 步骤 1: 输入以下命令检查系统是否检测到 LoRa 模块
i2cdetect -r -y 7
如果您看到以下输出,说明模块已被系统检测到
- 步骤 2: 输入以下命令来编译和构建 LoRa 信号发送工具
git clone https://github.com/lakshanthad/sx1302_hal
cd sx1302_hal
make
cd libloragw
cp ../tools/reset_lgw.sh .
sudo ./test_loragw_hal_tx -r 1250 -m LORA -f 867.1 -s 12 -b 125 -n 1000 -z 100 --dig 3 --pa 0 --pwid 13 -d /dev/spidev2.0
如果您看到以下结果并且 LoRa 模块上的 LED 变为红色,这意味着模块正在成功传输射频信号
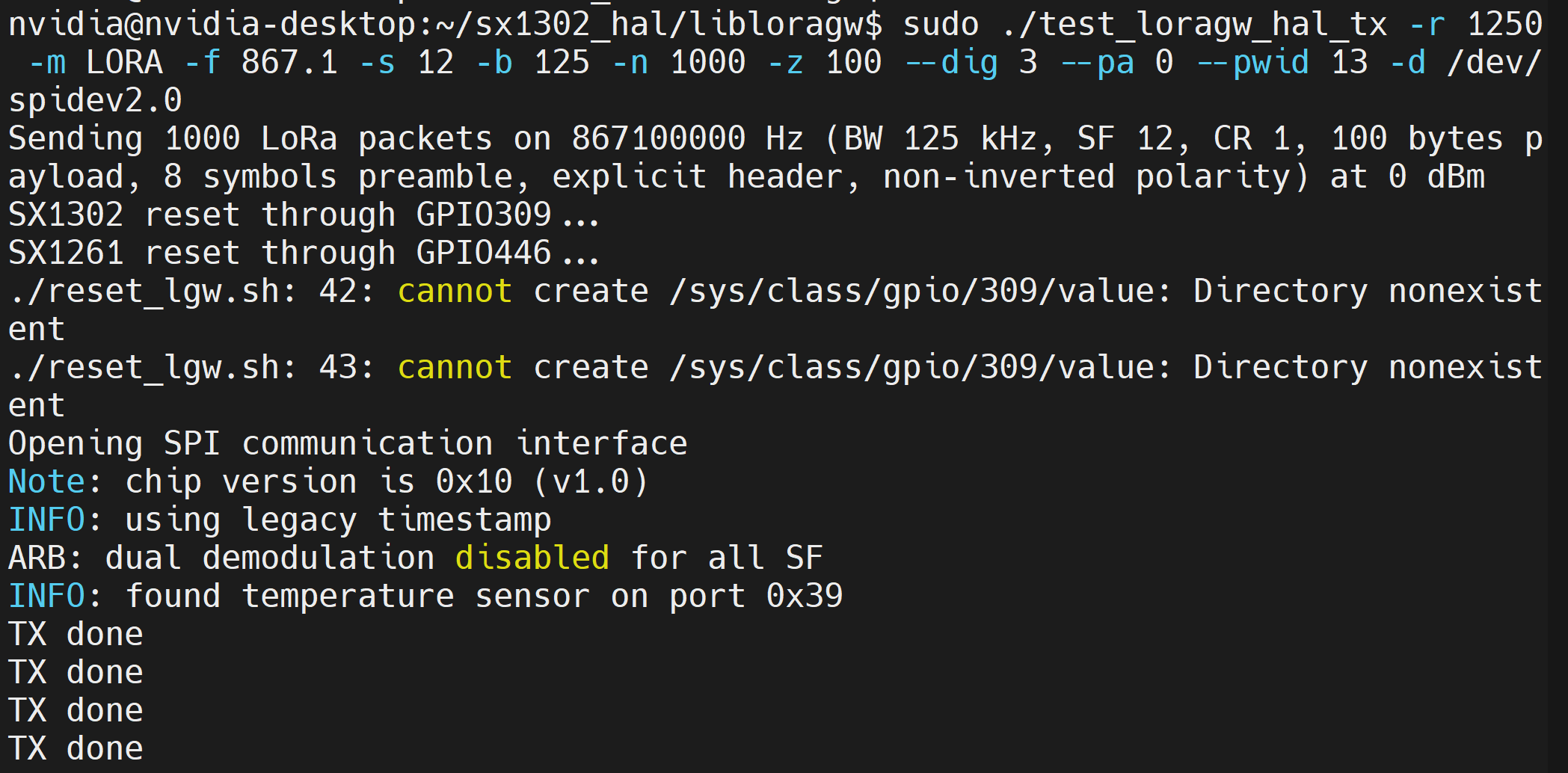

要停止传输,您可以在键盘上按 CTRL + C。
LoRa 模块使用 - 连接到 TTN
现在我们将连接到 TTN(The Things Network)并将 reComputer Industrial 用作 TTN LoRaWAN 网关
- 步骤 1: 输入以下命令使数据包转发器准备就绪
cd ..
cd packet_forwarder
cp ../tools/reset_lgw.sh .
- 步骤 2: 根据您正在使用的LoRa模块运行以下内容。这里我们测试了SPI US915版本
sudo ./lora_pkt_fwd -c global_conf.json.sx1250.US915
然而,不同其他模块的命令如下
# USB 915
sudo ./lora_pkt_fwd -c global_conf.json.sx1250.US915.USB
# SPI EU868
sudo ./lora_pkt_fwd -c global_conf.json.sx1250.EU868
# USB EU868
sudo ./lora_pkt_fwd -c global_conf.json.sx1250.EU868.USB
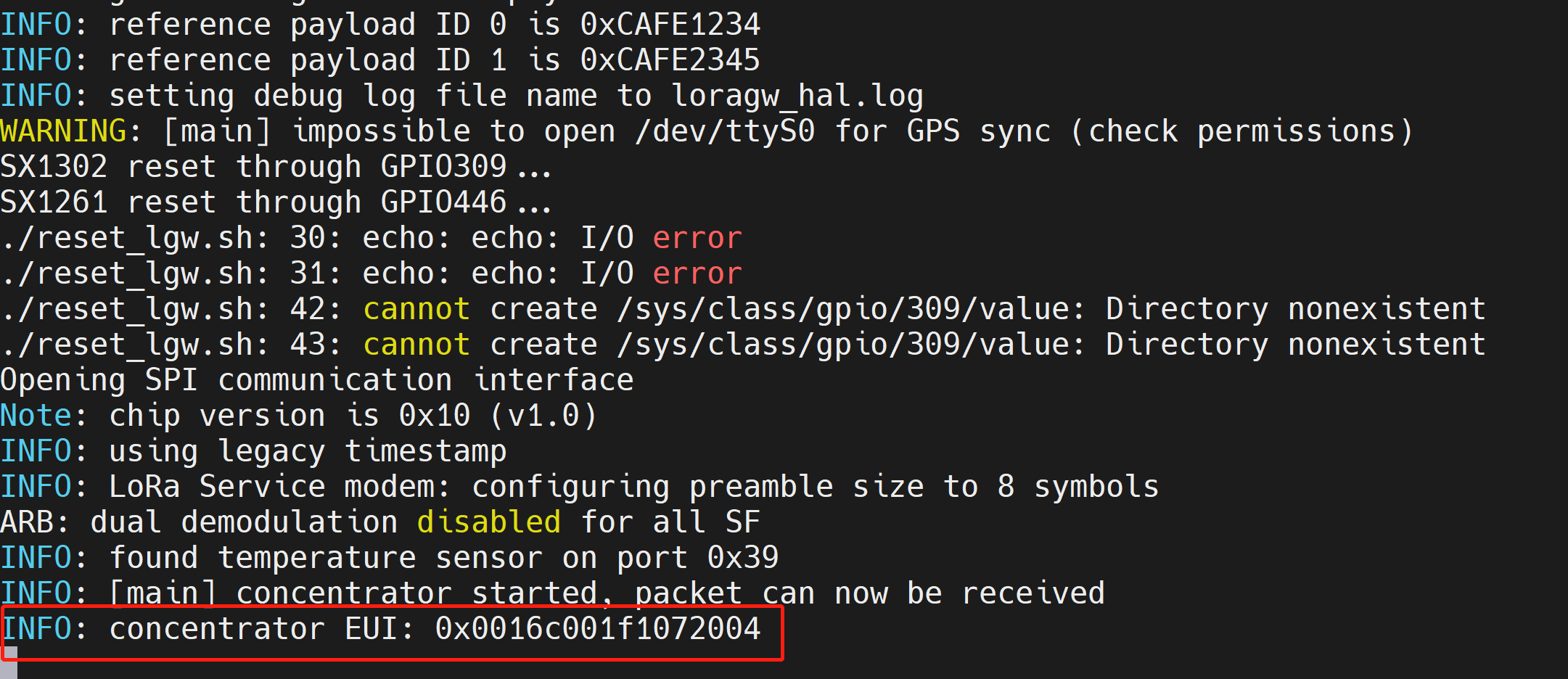
运行上述命令后,您将看到以下输出,最后一行显示集中器 EUI 信息。请保留此信息,因为我们稍后在设置网关与 TTN 连接时会用到它
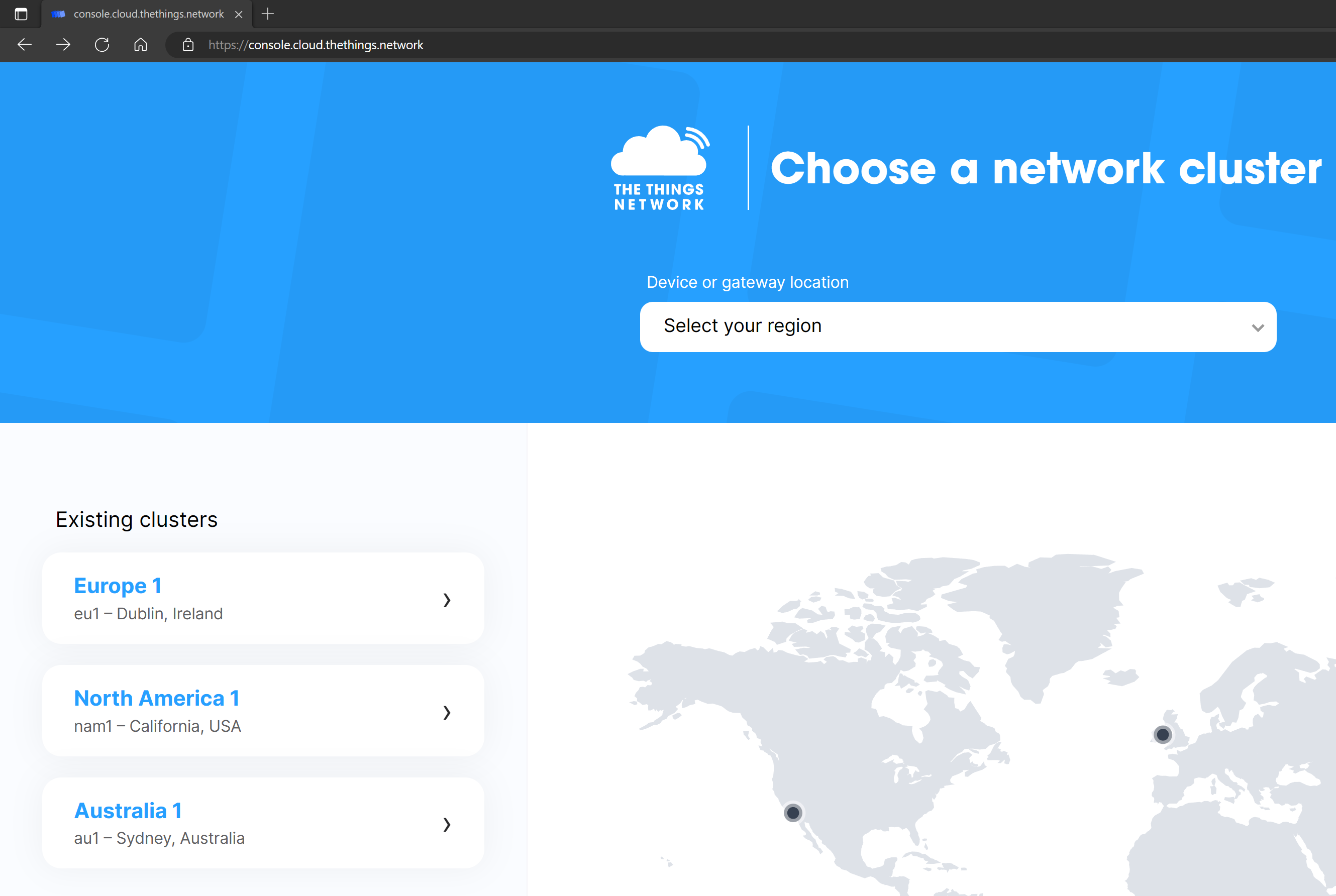
- 步骤 3: 访问 此 URL 进入 TTN 控制台并选择您所在的区域
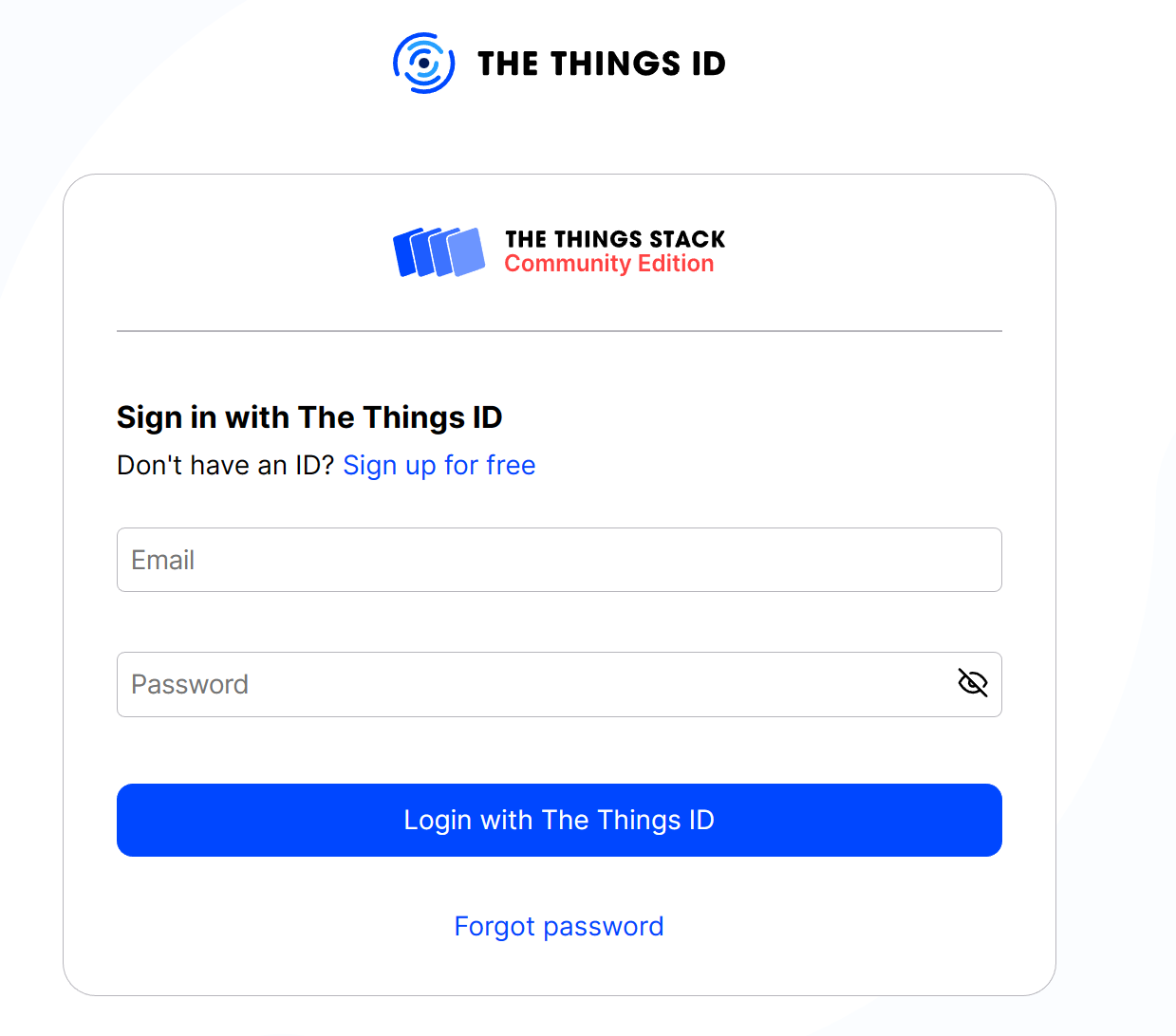
- 步骤 4: 如果您已有账户请登录,如果没有账户请注册新账户
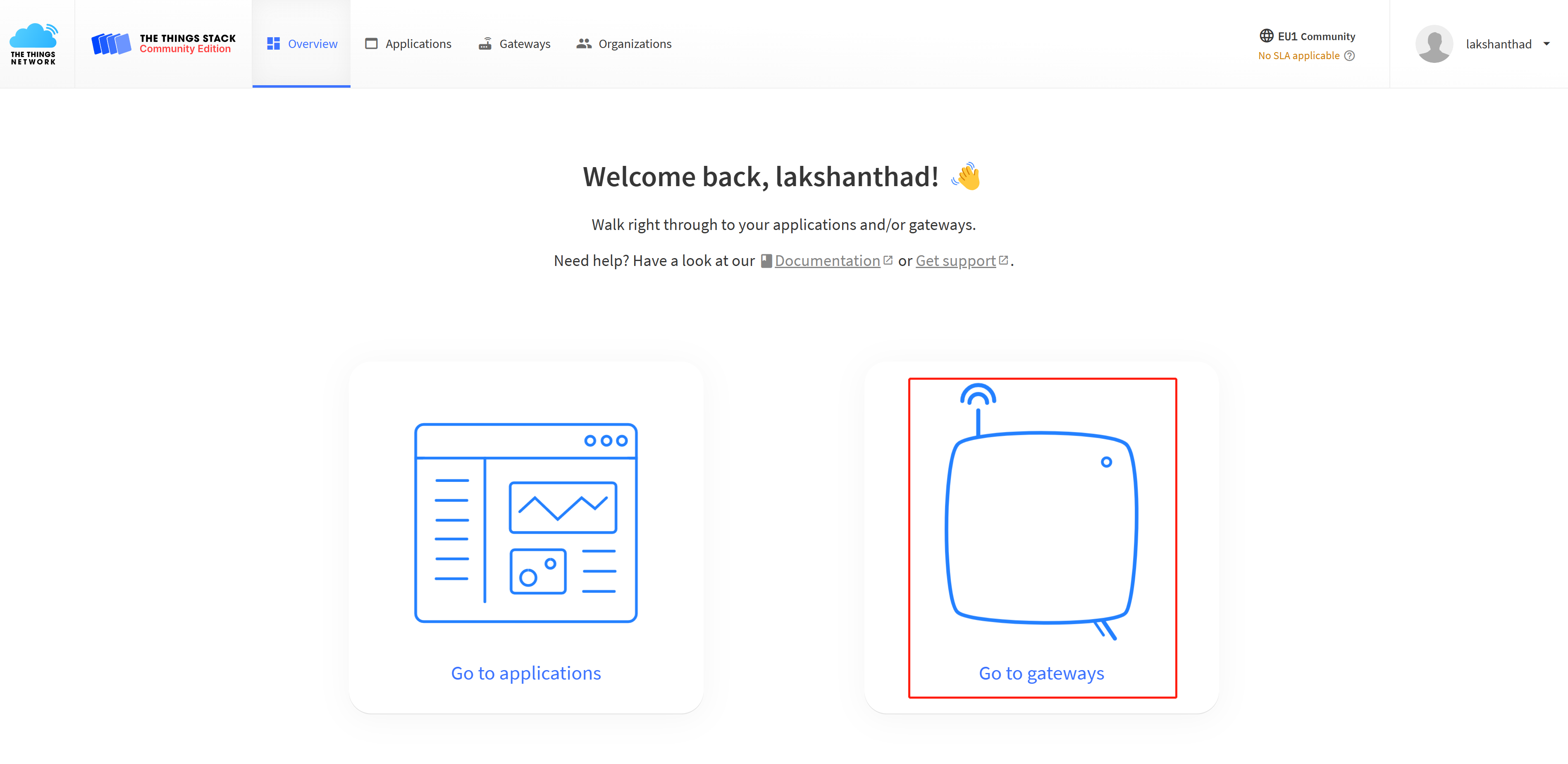
- 步骤 5: 点击 Go to gateways
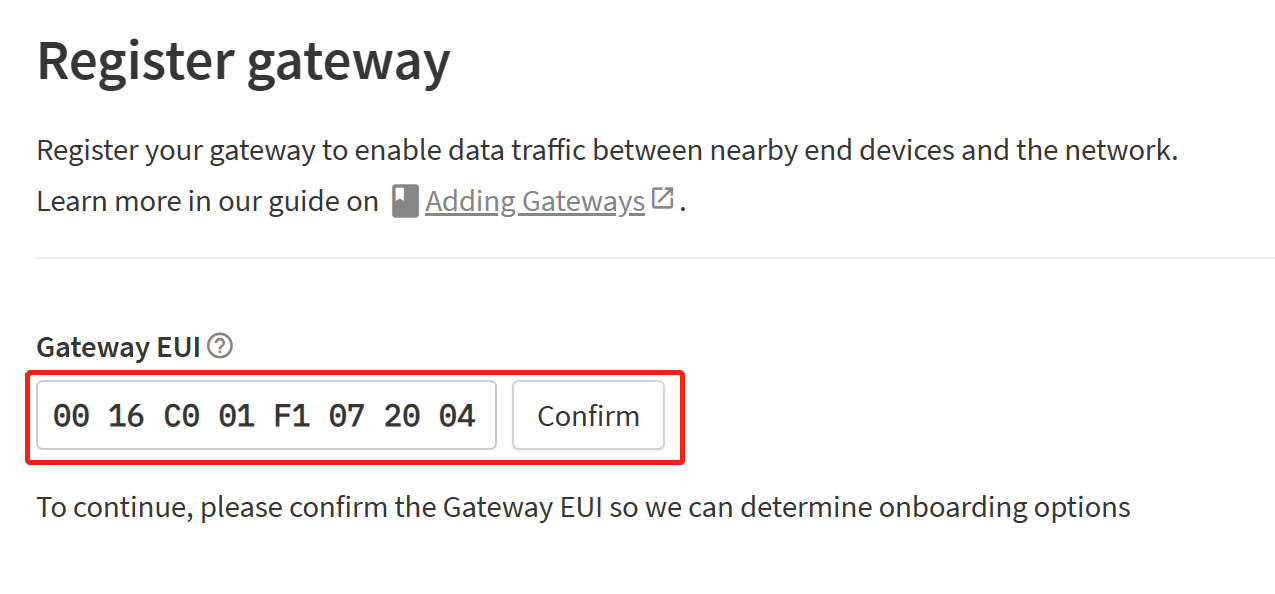
- 步骤 6: 点击 + Register gateway

- 步骤 7: 在 Gateway EUI 部分输入您之前获得的 Concentrator EUI,然后点击 Confirm
- 步骤 8: 根据您使用的 LoRa 模块输入 Frequency plan。这里我们使用的是 US915 版本的模块,因此选择了 United Stated 902-928 MHz, FSB 2 (used by TTN)。然后点击 Register gateway
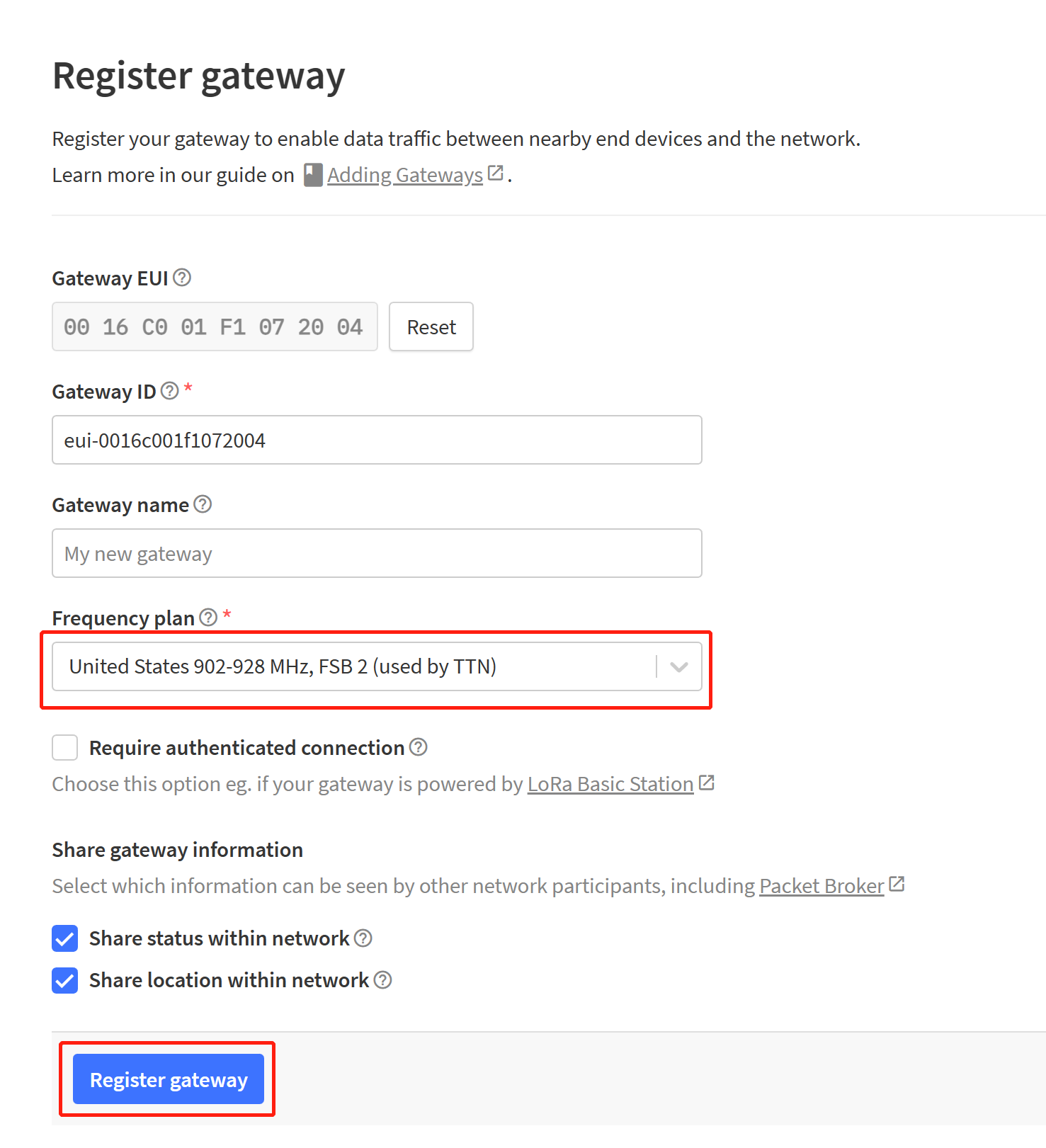
Gateway ID 已为您自动填写。但是,您可以将其更改为任何您喜欢的名称。Gateway name 不是必填项。但是,您也可以根据自己的喜好填写
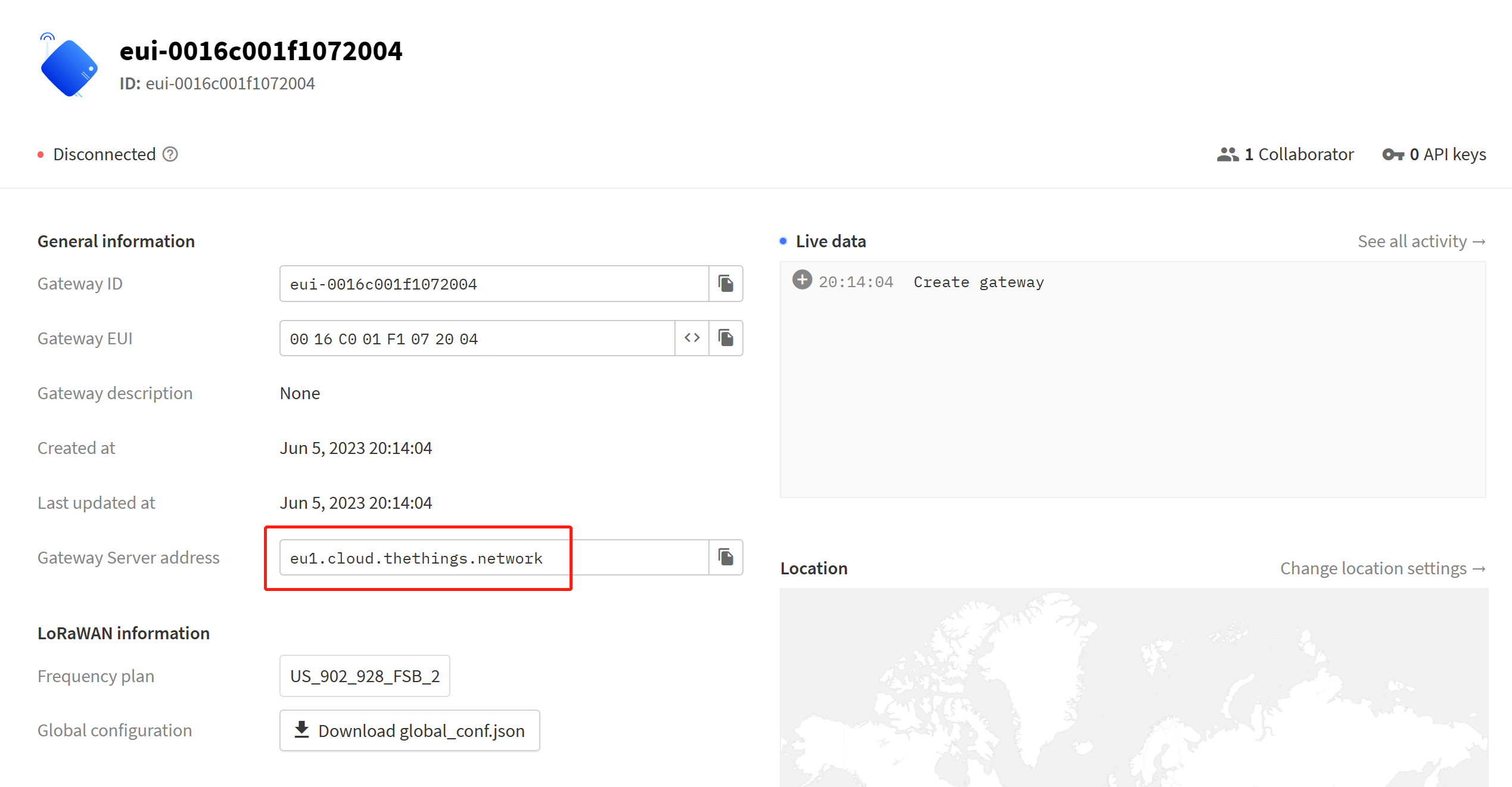
- 步骤 9: 记下网关主页上的 Gateway Server Address
-
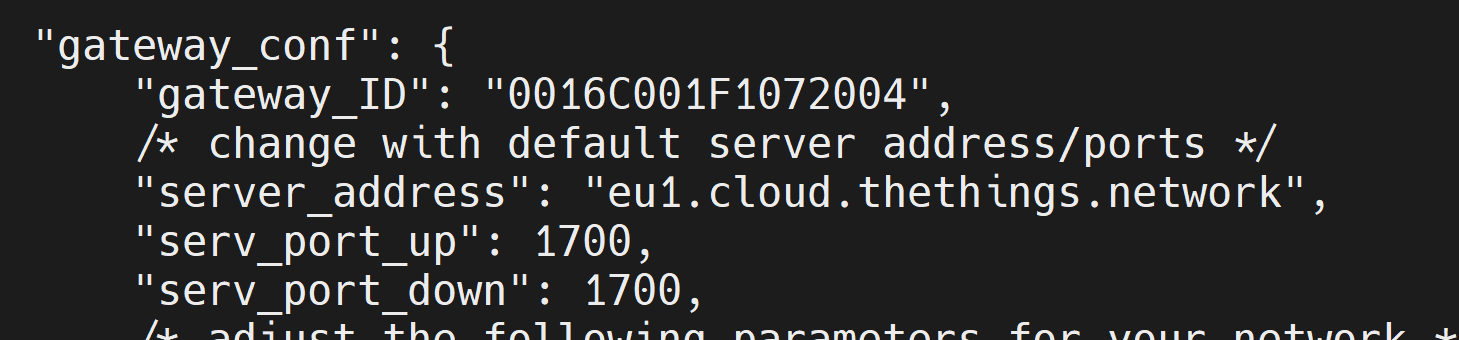
步骤 9: 在 reTerminal Industrial 上,编辑我们与 lora_pkt_fwd 命令一起使用的 global_conf_json 文件。这里您需要按如下方式更改 gateway_ID、server_address、serv_port_up 和 serv_port_down 选项
- gateway_ID: 设备的集中器 EUI
- server_address: 来自 TTN 的网关服务器地址
- serv_port_up: 1700
- serv_port_down: 1700
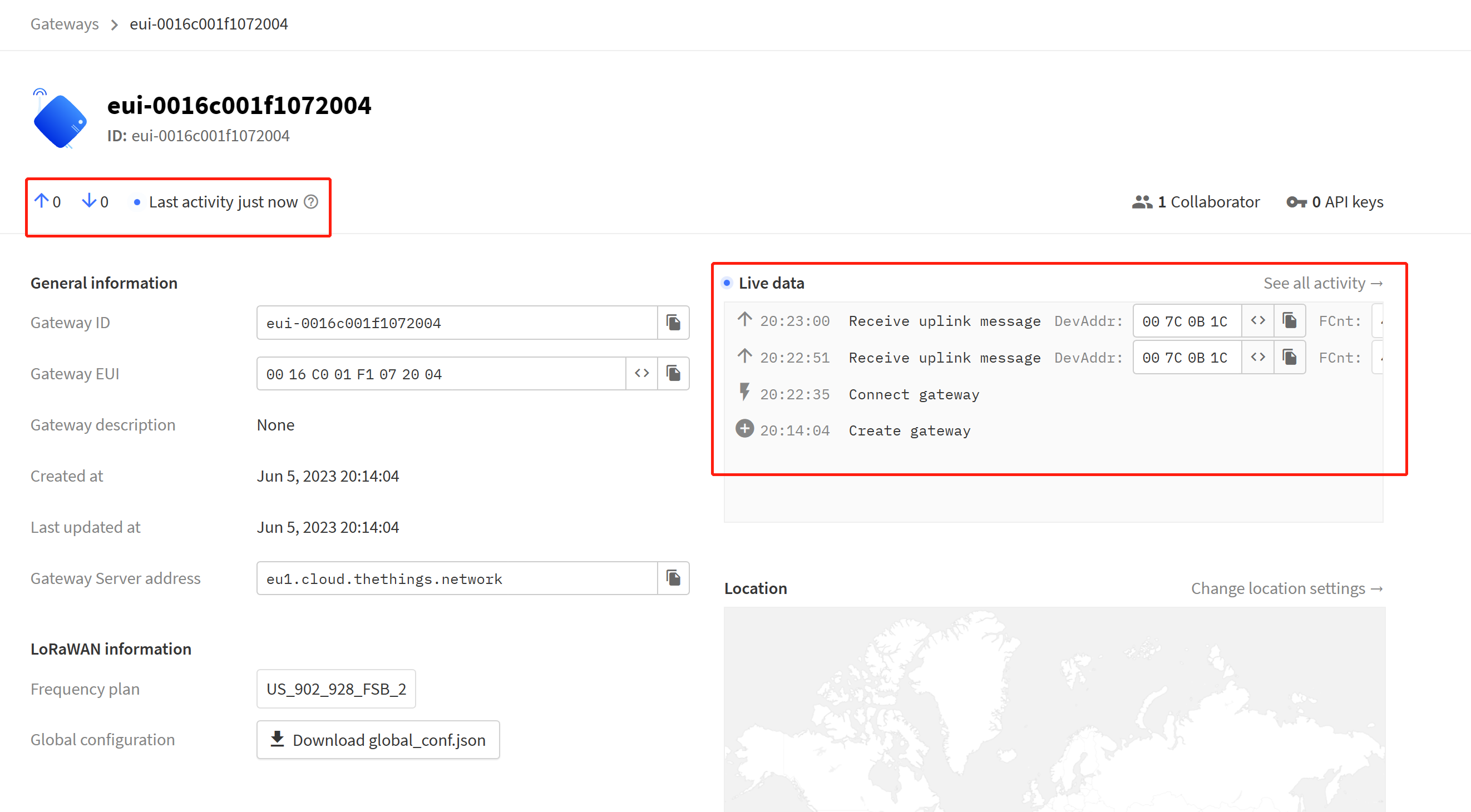
- 步骤 10: 重新运行数据包转发器
sudo ./lora_pkt_fwd -c global_conf.json.sx1250.US915
如果您看到以下输出,这意味着设备已成功连接到 TTN
M.2 Key B
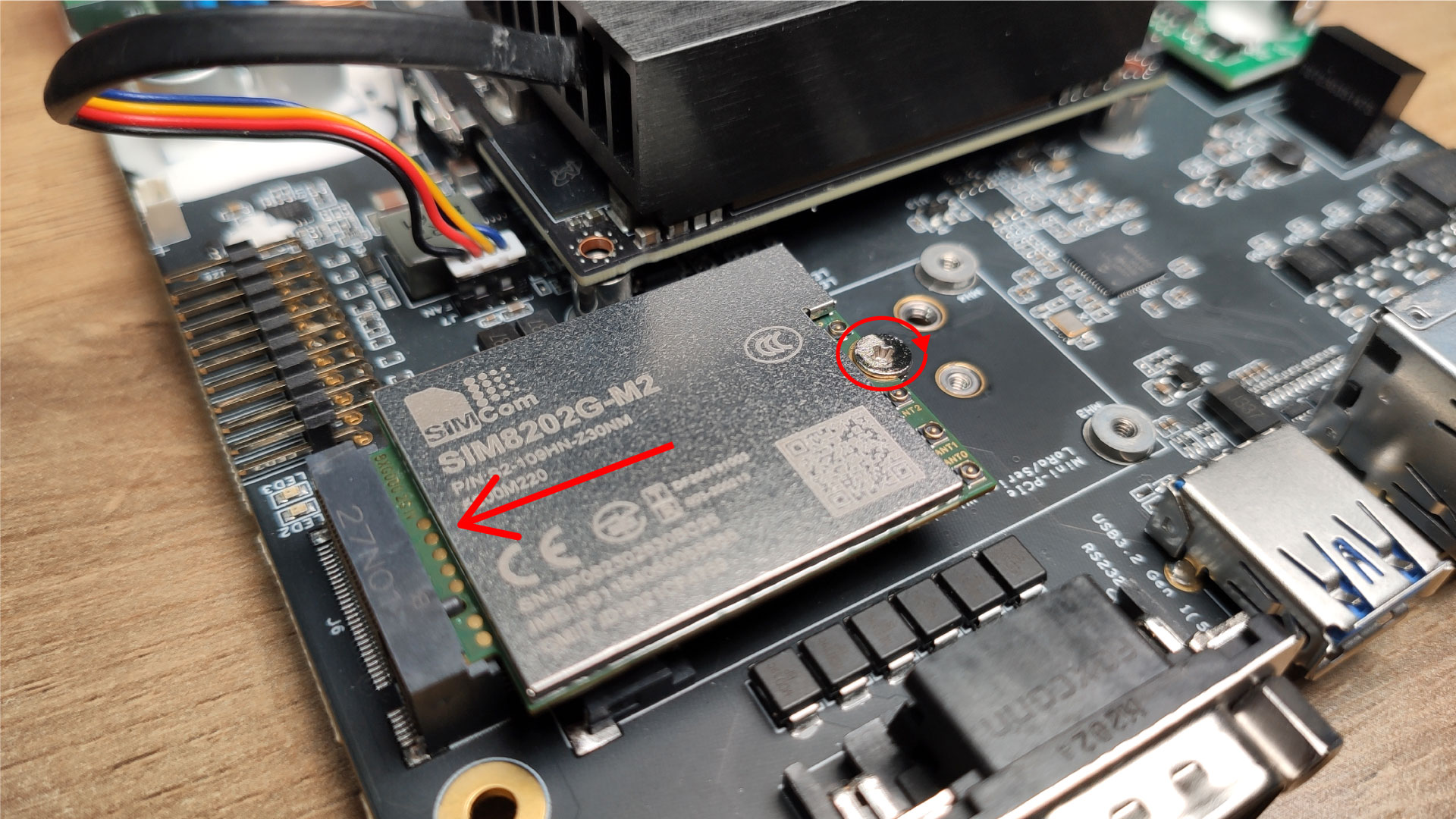
reComputer Industrial 配备了一个 M.2 Key B 连接器,支持 4G 和 5G 模块。目前我们已经测试了 SIM8202G-M2 5G 模块
5G 模块连接概述
-
步骤 1: 如果板子已经开机,请先关机
-
步骤 2: 确保支撑柱已就位,然后拆下支撑柱上的顶部螺丝
- 步骤 2: 将 5G 模块滑入 M.2 Key B 插槽,并拧入支撑柱螺丝以固定 5G 模块(关于支撑柱的说明)
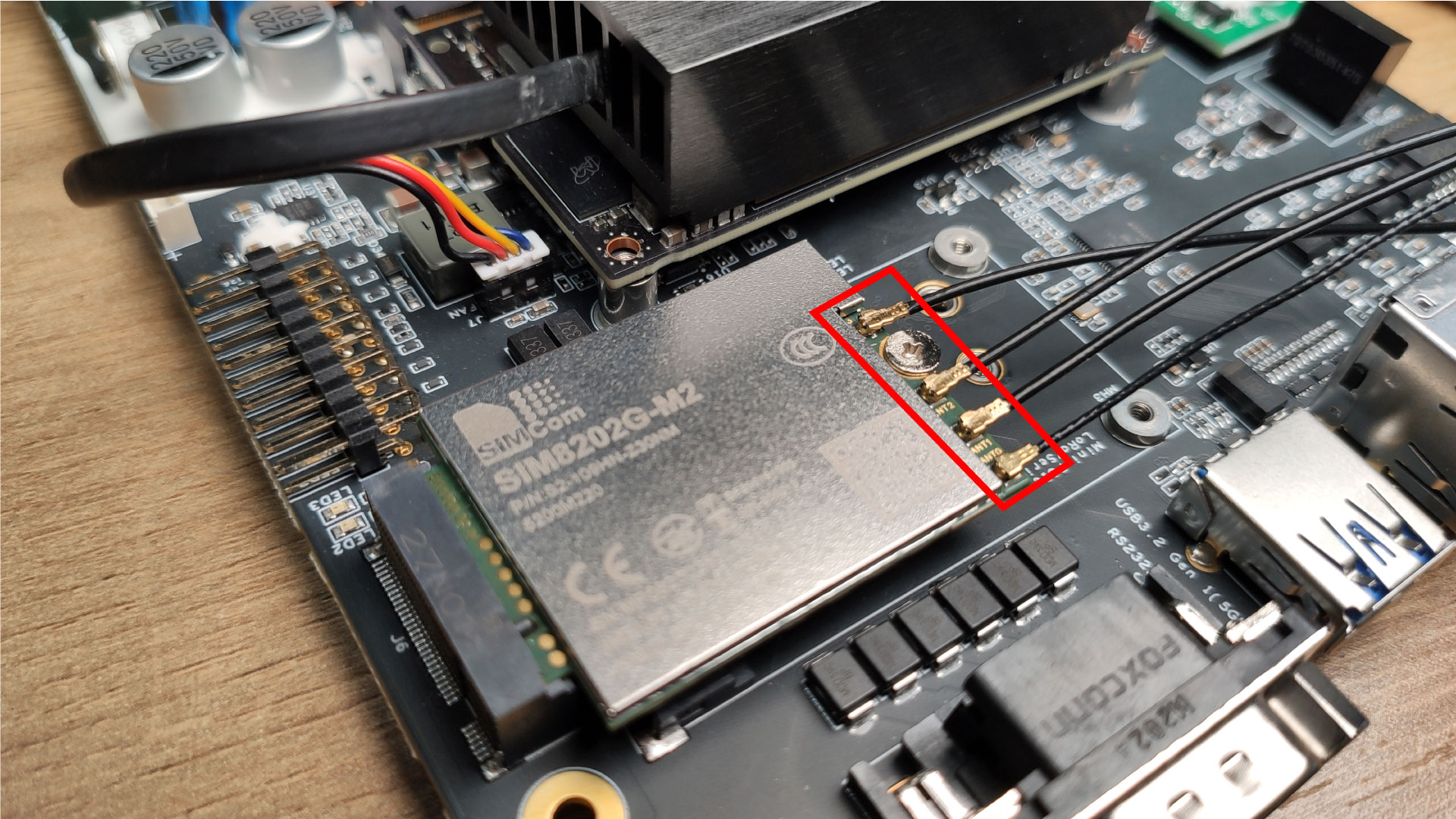
- 步骤 3: 将 4 根天线连接到模块上的天线连接器。这里您需要使用 IPEX 4 连接器
- 步骤 4: 将支持 5G 的 nano SIM 卡插入板子上的 SIM 卡插槽,确保 SIM 卡的金属表面朝下。这里要将卡片完全插入,使其在碰到内部弹簧后弹回并锁定到位。
如果您想要取出 SIM 卡,请将卡片推入以碰到内部弹簧,这样 SIM 卡就会从插槽中弹出
- 步骤 5: 给板子上电
5G 模块使用 - 测试拨号
使用 SIM8202G-M2 5G 模块时,模块不会自动启动。因此我们首先需要切换几个 GPIO 来使其启动
步骤 1: 输入以下命令来启动 5G 模块
- Jetpack5
- Jetpack6
sudo su
cd /sys/class/gpio
echo 309 > export
cd gpio309
echo out > direction
echo 0 > value
cd..
echo 341 > export
cd PEE.02
echo out > direction
echo 1 > value
cd..
echo 330 > export
cd PCC.02
echo out > direction
echo 0 > value
sudo gpioset --mode=wait gpiochip2 9=0
sudo gpioset --mode=wait gpiochip1 25=1
sudo gpioset --mode=wait gpiochip1 14=0
请打开多个终端来运行这些命令,并确保每个终端窗口保持活动状态。
一旦执行上述操作,LED2 将亮起绿色,如下所示
步骤 2: 安装 minicom
sudo apt update
sudo apt install minicom -y
步骤 3: 进入已连接的 5G 模块的串行控制台,这样我们就可以输入 AT 命令并与 5G 模块进行交互
sudo minicom -D /dev/ttyUSB2 -b 115200
步骤 4: 输入命令 "AT" 并按回车键。如果您看到响应为 "OK",则 5G 模块工作正常
步骤 5: 输入命令 "ATI" 来检查模块信息
步骤 6: 要测试模块,请输入以下命令来拨打另一个电话号码
ATD<phone_number>;
您将看到以下输出
DI/ DO
reComputer Industrial 支持 4 个数字输入和 4 个数字输出通道,所有通道都经过光学隔离,可有效保护主板免受电压尖峰或其他电气干扰的影响。在同一个连接器上还有一个 CAN 接口,我们将在本 wiki 的后面部分讨论。
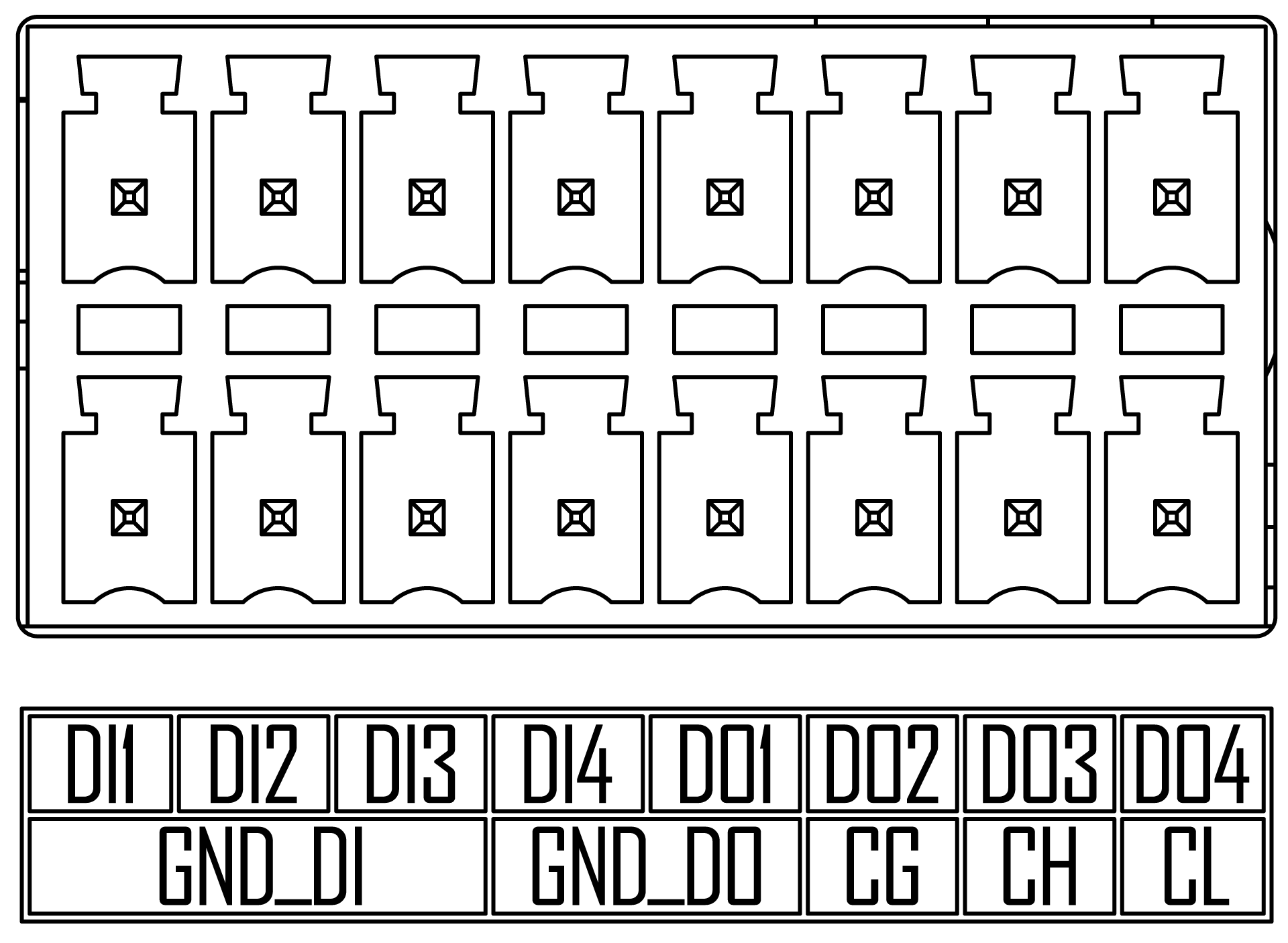
DI/ DO 引脚分配表
| 类型 | 标签名称 | 原理图信号 | 模块引脚号 | BGA 编号 | GPIO 编号 | 电压/电流限制 | 备注 |
|---|---|---|---|---|---|---|---|
| 输入 | DI1 | DI_1_GPIO01 | 118 | PQ.05 | 453 | 12V/ 总电流 20mA | 12V 数字输入,接地信号需要 连接到 GND_DI(引脚2/4/6) |
| DI2 | DI_2_GPIO09 | 211 | PAC.06 | 492 | |||
| DI3 | DI_3_GPIO11 | 216 | PQ.06 | 454 | |||
| DI4 | DI_4_GPIO13 | 228 | PH.00 | 391 | |||
| 输出 | DO1 | DO_1_GPIO | 193 | PI.00 | 399 | 每个引脚 40V/40mA 负载 | 数字输出,最大耐受 电压 40V,接地信号需要 连接到 GND_DO(引脚8/10) |
| DO2 | DO_2_GPIO | 195 | PI.01 | 400 | |||
| DO3 | DO_3_GPIO | 197 | PI.02 | 401 | |||
| DO4 | DO_4_GPIO | 199 | PH.07 | 398 | |||
| CAN | CH | / | 具有标准差分信号的 CAN 总线, 接地信号需要连接到 GND_ISO(引脚 12) | ||||
| CL | |||||||
| 接地 | GND_DI | / | 12V 数字输入的参考接地信号, 也是 DI 的回路路径 | ||||
| GND_DO | 数字输出的参考接地信号,也是 DO 的回路路径 | ||||||
| CG | CAN 的参考接地信号 | ||||||
请注意,上表中的引脚编号仅适用于 Jetpack5。我们可以通过以下方式获取 Jetpack6 的引脚编号:
- 使用
gpioinfo命令获取 GPIO 表。 - 检查 BGA 编号 以找到 Jetpack6 上对应的引脚编号。
DI 连接概述
您可以按照下图进行 DI 连接。最好在 DI 线路中串联一个电阻。这里我们已经测试了将 4.7kΩ 电阻连接到 DI1 引脚。
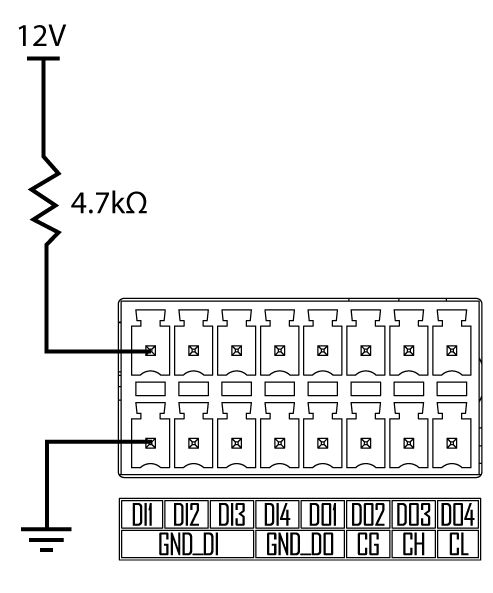
DI 使用方法
您需要在 DI 线路上输入 12V 电压才能被检测为输入
步骤 1: 按照上图所示连接到 DI1 引脚 并输入 12V
步骤 2: 打开并检查 DI1 的状态,如下所示:
- Jetpack5
- Jetpack6
sudo su
cd /sys/class/gpio
echo 453 > export
cd PQ.05
cat value
您可以参考 DI/ DO 引脚分配表 来查找 GPIO 编号和 BGA 编号。在上面的示例中,对于 DI1 引脚,GPIO 编号是 453,BGA 编号是 PQ.05
sudo gpioget gpiochip0 105
如果输出为0,表示有12V输入。如果输出为1,表示没有输入电压。
DO连接概述
您可以按照下图进行DO连接。最好在DO线路中串联一个电阻。这里我们使用4.7kΩ电阻进行了测试
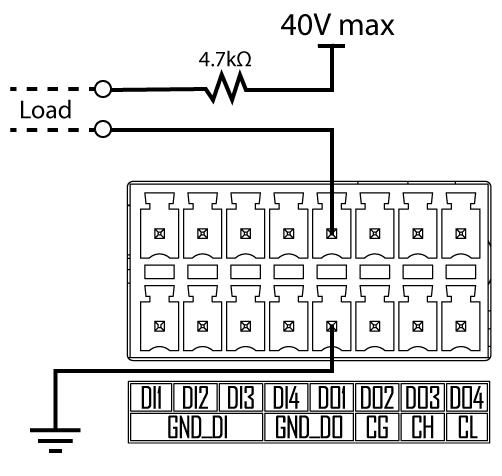
DO使用方法
这里您需要按照上图连接一个负载。测试的最简单方法是连接一个万用表(如果您有的话),或者连接一个需要最大电压小于40V的负载
步骤1: 按照上图所示连接到DO1引脚,输入最大40V
步骤2: 打开并启用D01的GPIO,如下所示:
- Jetpack5
- Jetpack6
sudo su
cd /sys/class/gpio
echo 399 > export
cd PI.00
echo out > direction
echo 1 > value
您可以参考 DI/ DO 引脚分配表 来查找 GPIO 编号和 BGA 编号。在上面的示例中,对于 DO1 引脚,GPIO 编号是 399,BGA 编号是 PI.00
sudo gpioset --mode=wait gpiochip0 51=1
如果负载被打开或万用表输出您输入的电压,则测试功能正常。
CAN
reComputer Industrial 具有支持 CAN FD(控制器局域网灵活数据速率)协议的 CAN 接口,速率为 5Mbps。CAN 接口使用电容隔离进行隔离,提供出色的 EMI 保护,确保在工业和自动化应用中的可靠通信。默认安装了 120Ω 的终端电阻,您可以使用 GPIO 切换此电阻的开关状态。
注意:CAN 接口使用隔离电源,这意味着连接到 CAN 接口的外部设备的接地信号应连接到 CG 引脚
与 USB 转 CAN 适配器的连接概述
要测试和与 CAN 总线接口,请将 USB 转 CAN 适配器连接到板上的 CAN 连接器,如下所示
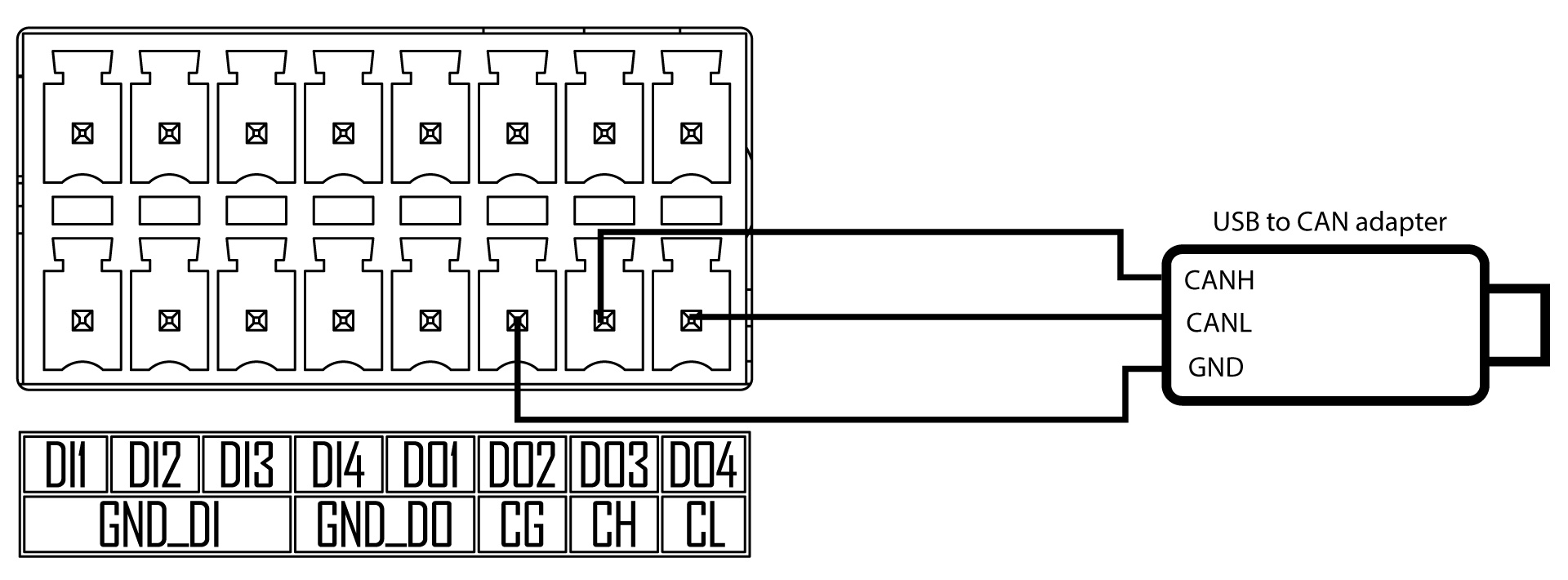
这里我们使用了我们商城中提供的 USB 转 CAN 分析仪适配器(带 USB 线)。
与 USB 转 CAN 适配器的使用
-
步骤 1: 从制造商网站下载您使用的 USB 转 CAN 适配器的驱动程序并安装。在我们的情况下,根据我们使用的适配器,驱动程序可以在这里找到
-
步骤 2: 一些适配器还为 PC 提供必要的软件,以便与 CAN 设备通信。在我们的情况下,根据我们使用的适配器,我们已经下载并安装了软件,可以在这里找到
-
步骤 3: 在 reComputer Industrial 上打开终端窗口,执行以下命令来配置和启用 CAN 接口
sudo modprobe mttcan
sudo ip link set can0 type can bitrate 125000
sudo ip link set can0 up
- 步骤 4: 在终端中输入 ifconfig,您将看到 CAN 接口已启用

- 步骤 5: 打开您之前安装的 CAN 软件。在这种情况下,我们将根据所使用的 CAN 适配器打开相应的软件
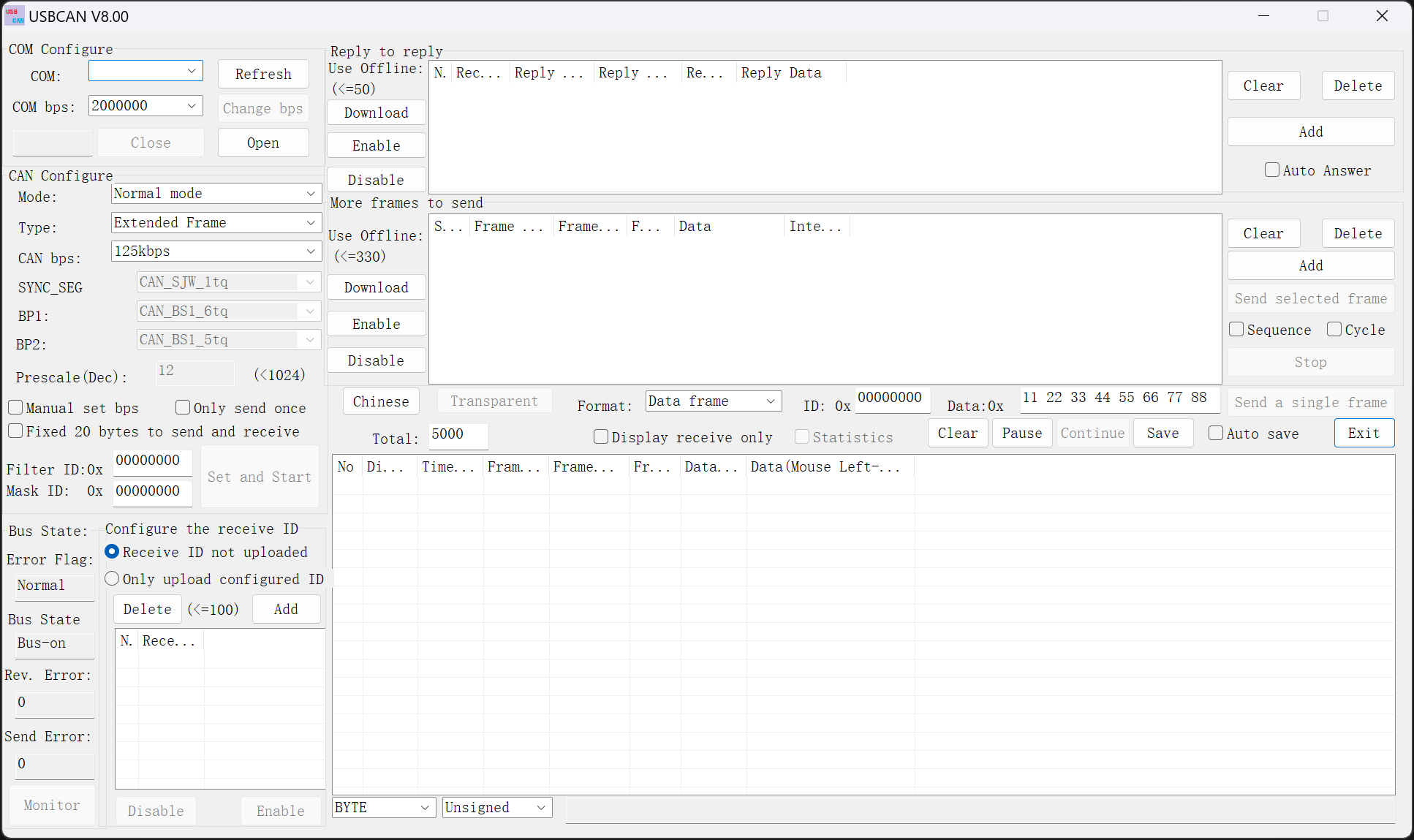
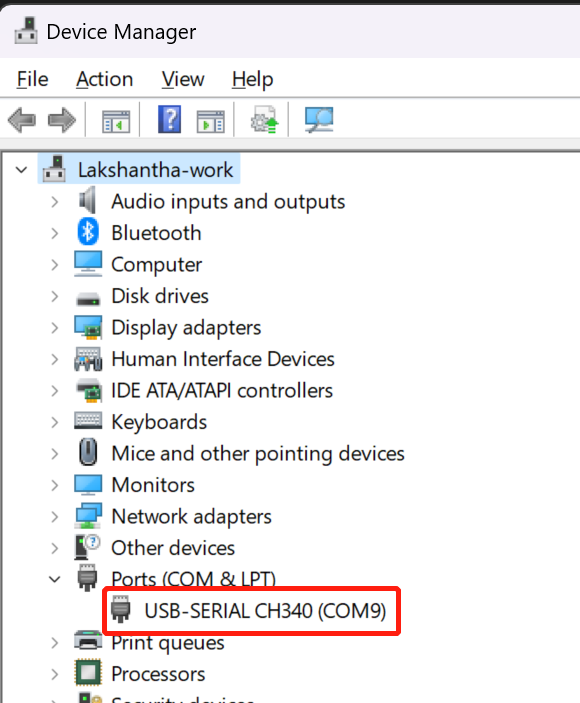
- 步骤 6: 将 USB 转 CAN 适配器连接到 PC,并通过在 Windows 搜索栏中搜索来打开设备管理器。现在您将在端口 (COM 和 LPT) 下看到已连接的适配器。记下此处列出的串行端口。根据下图,串行端口是 COM9
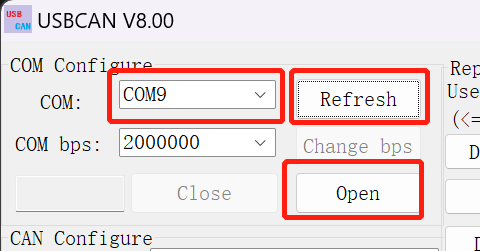
- 步骤 7: 打开 CAN 软件,点击 COM 部分旁边的刷新,点击下拉菜单并根据连接的适配器选择串行端口。保持 COM bps 为默认值,然后点击打开
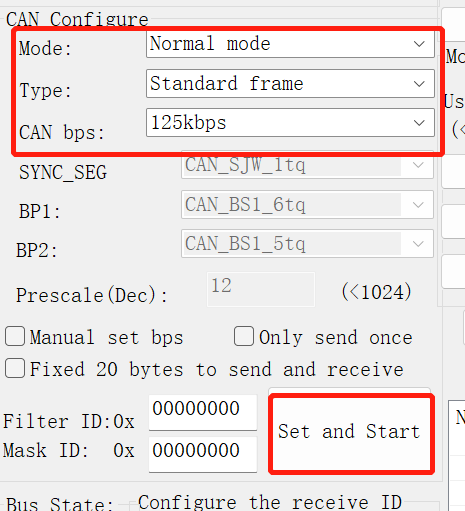
- 步骤 8: 保持模式和 CAN bps 为默认值,将类型更改为标准帧,然后点击设置并启动
- 步骤 9: 在 reComputer Industrial 上,执行以下命令向 PC 发送 CAN 信号
cansend can0 123#abcdabcd
现在您将看到软件接收到的上述信号,如下所示

- 步骤 10: 在 reComputer Industrial 上,执行以下命令等待接收来自 PC 的 CAN 信号
candump can0 &
- 步骤 11: 在 CAN 软件上,点击 Send a single frame

现在您将看到 reComputer Industrial 接收到的数据,如下所示

与 reTerminal DM 的连接概述
如果您有 reTerminal DM,您可以直接与其通信,因为 reTerminal DM 也有 CAN 接口。
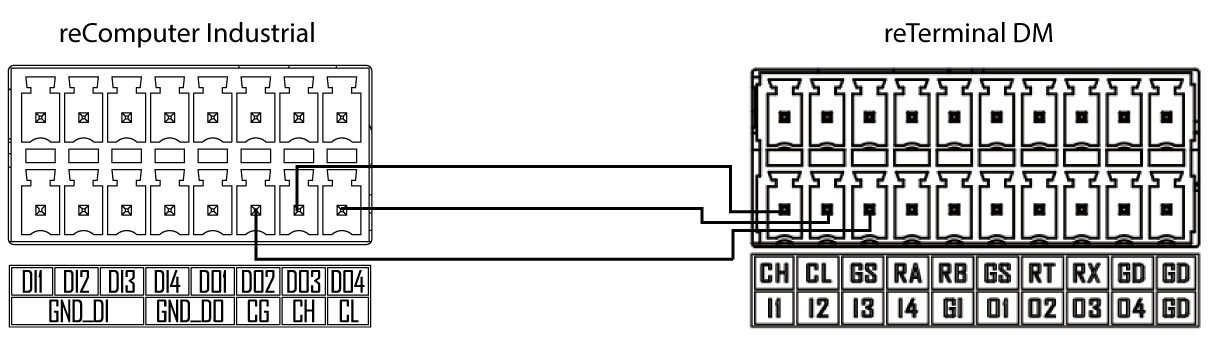
参考下图通过 CAN 连接 reComputer Industrial 和 reTerminal DM
与 reTerminal DM 的使用
-
步骤 1: 在使用 reTerminal DM 之前,请访问此 wiki 来开始使用 reTerminal DM
-
步骤 2: 在 reComputer Industrial 上打开终端窗口并执行以下命令来配置和启用 CAN 接口
sudo modprobe mttcan
sudo ip link set can0 type can bitrate 125000
sudo ip link set can0 up
- 步骤 3: 在 reTerminal DM 上打开终端窗口,执行以下命令来配置和启用 CAN 接口
sudo modprobe mttcan
sudo ip link set can0 type can bitrate 125000
sudo ip link set can0 up
- 步骤 4: 在 reTerminal DM 上打开终端窗口,执行以下命令来配置和启用 CAN 接口
sudo modprobe mttcan
sudo ip link set can0 type can bitrate 125000
sudo ip link set can0 up
- 步骤 5: 如果您在两个设备上输入 ifconfig,您将看到 CAN 接口已启用
- 步骤 6: 在 reTerminal DM 上,执行以下命令等待接收来自 reComputer Industrial 的 CAN 信号
candump can0 &
- 步骤 7: 在 reComputer Industrial 上,执行以下命令向 reTerminal Industrial 发送 CAN 信号
cansend can0 123#abcdabcd
现在您将看到它被 reTerminal DM 接收,如下所示
- 步骤 8: 重复步骤 6 和步骤 7,但交换设备。使用 reTerminal DM 发送 CAN 信号,使用 reComputer Industrial 接收它们
RS232/ RS422/ RS485 接口
reComputer Industrial 有一个 DB9 连接器,支持 RS232、RS422 和 RS485 通信协议,板载有一个 DIP 开关面板,用于在不同接口选项之间切换
您可以看到 DIP 开关面板如下:
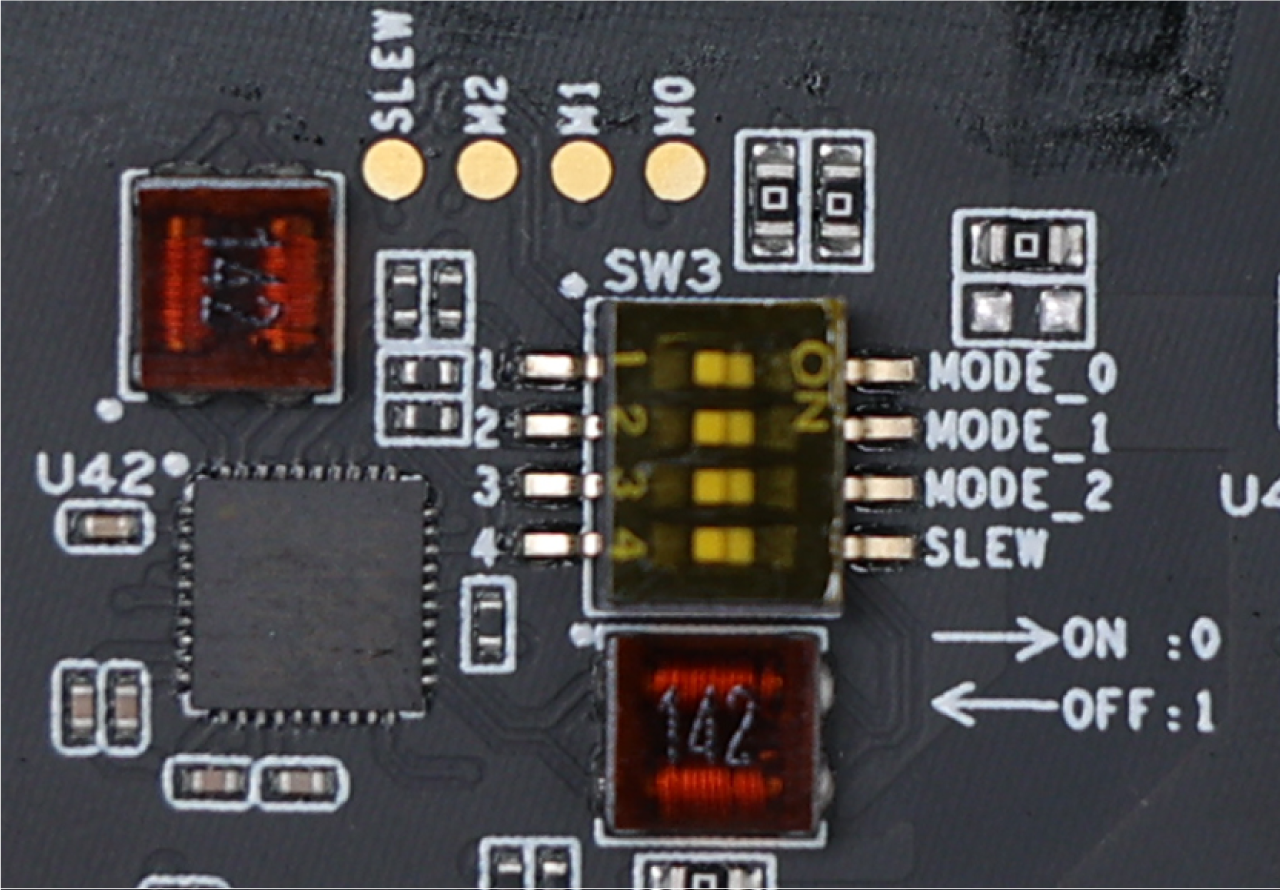
使用 DIP 开关面板之前,请确保移除黄色塑料盖
下表说明了基于 DIP 开关位置的不同模式
| MODE_0 | MODE_1 | MODE_2 | 模式 | 状态 | |
|---|---|---|---|---|---|
 | 0 | 0 | 0 | RS-422 全双工 | 1T/1R RS-422 |
 | 0 | 0 | 1 | 纯 RS-232 | 3T/5R RS-232 |
 | 0 | 1 | 0 | RS-485 半双工 | 1T/1R RS-485,TX ENABLE 低电平有效 |
 | 0 | 1 | 1 | RS-485 半双工 | 1T/1R RS-485,TX ENABLE 高电平有效 |
 | 1 | 0 | 0 | RS-422 全双工 | 1T/1R RS-422 带终端电阻 |
 | 1 | 0 | 1 | 纯 RS-232 | 1T/1R RS-232 与 RS485 共存 |
| 应用程序无需总线 | |||||
| 开关 IC(特殊用途)。 | |||||
 | 1 | 1 | 0 | RS-485 半双工 | 1T/1R RS-485 带终端电阻 |
| TX ENABLE 低电平有效 | |||||
 | 1 | 1 | 1 | 低功耗 | 所有 I/O 引脚均为高阻抗 |
| 关断 |
开箱即用,交换机的默认模式将从工厂设置为 RS485,DIP开关为 010
上表考虑了 DIP 开关面板的前三个开关。但是,第四个开关负责切换转换速率,这与数据速率直接相关
| 状态 | 注释 | |
|---|---|---|
 | 1 | SLEW= Vcc 此 RS232/RS422/RS485 多协议收发器限制通信速率如下: RS-232:最大数据速率为 1.5Mbps RS-485/RS-422:最大数据速率为 10Mbps 实际最大数据速率取决于所使用的 Jetson SO M |
 | 0 | SLEW = GND RS-232:最大数据速率为 250Kbps RS-485/RS-422:最大数据速率为 250kbps |
这里我们将使用USB转RS232、RS485和RS422适配器来测试这些接口。因此在继续之前,您需要在PC上安装一个串口终端应用程序。这里我们推荐您安装Putty,它易于设置和使用。
- 步骤1: 访问此网站并根据您的PC架构下载Putty
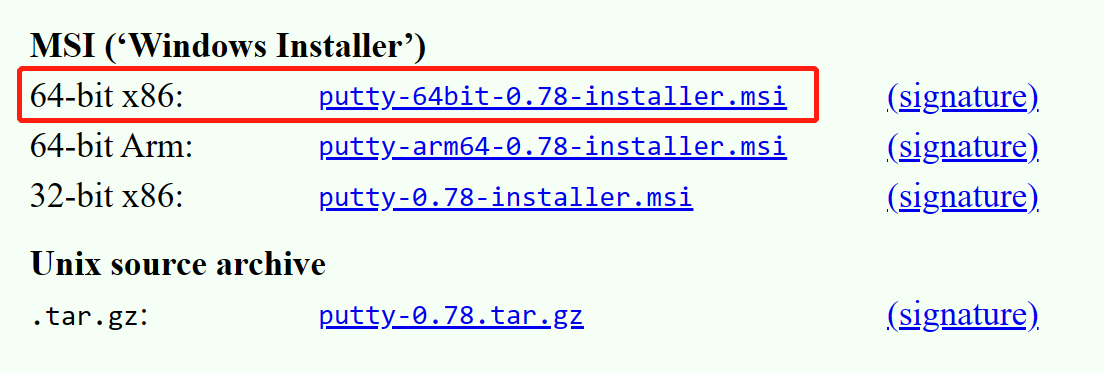
这里我们根据所使用的PC选择了Putty,这是一台X86 Windows 64位机器
- 步骤2: 打开下载的安装程序,按照提示安装应用程序
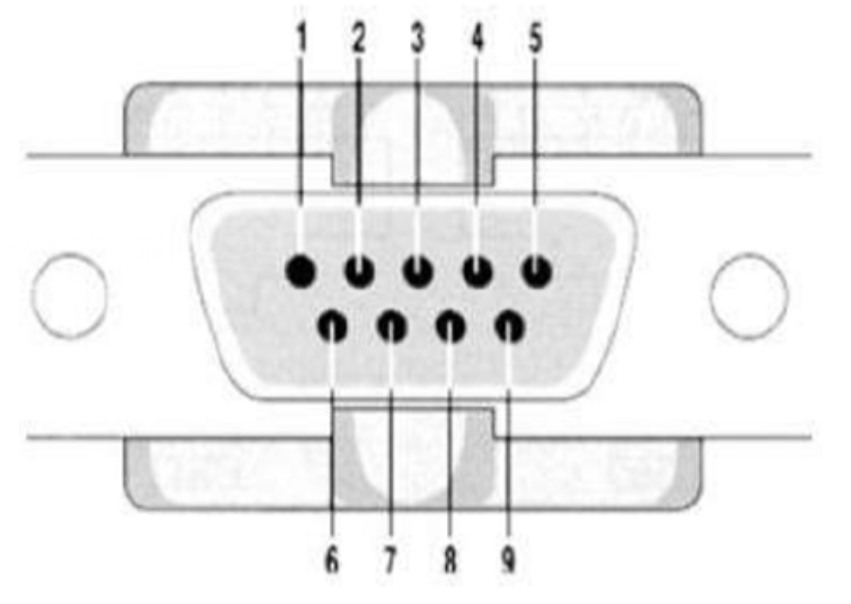
通用连接概述
您可以参考DB9连接器的引脚编号和表格来进行连接
| 模式 | 001/101 | 000/100 | 010/011/110 |
|---|---|---|---|
| 引脚 | RS232 | RS422 | RS485 |
| 1 | TXD- | Data- | |
| 2 | RXD | TXD+ | Data+ |
| 3 | TXD | RXD+ | |
| 4 | RXD- | ||
| 5 | GND | GND | GND |
| 6 | |||
| 7 | RTS | ||
| 8 | CTS | ||
| 9 |
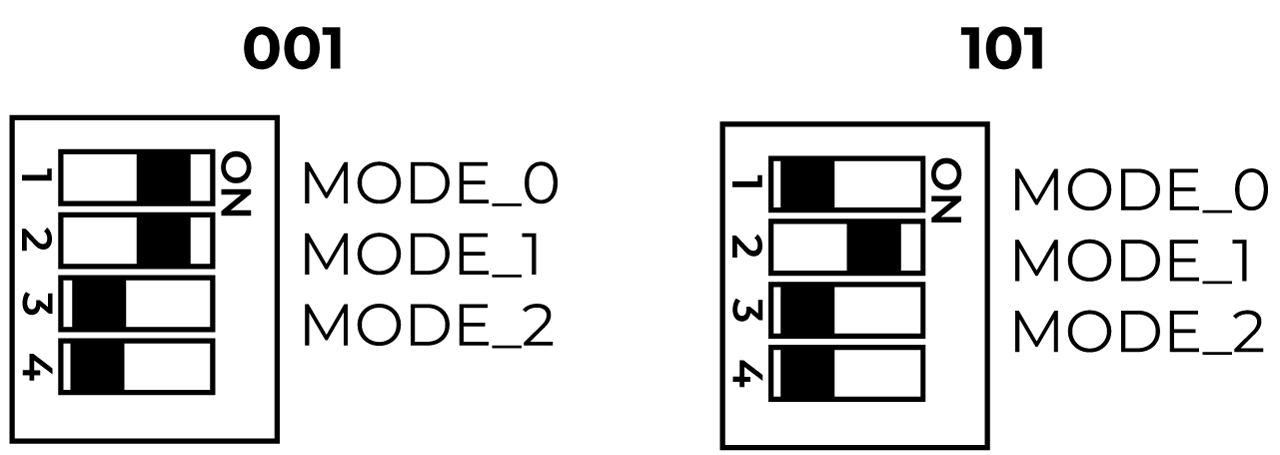
RS232 连接概述
在这里,您可以使用 USB 转 RS232 适配器来测试接口。我们使用了 UGREEN USB 转 RS232 适配器 进行测试。
步骤 1: 关闭设备
步骤 2: 这里我们有 2 个选项来设置 DIP 开关。可以选择 001 模式或 101 模式。每种模式的开关位置如下所示
步骤 3: 将 USB 转 RS232 适配器连接到 DB9 连接器。这里我们连接了上面提到的适配器

步骤 4: 将另一端连接到 PC 上的一个 USB 端口
步骤 5: 打开设备
RS232 使用方法
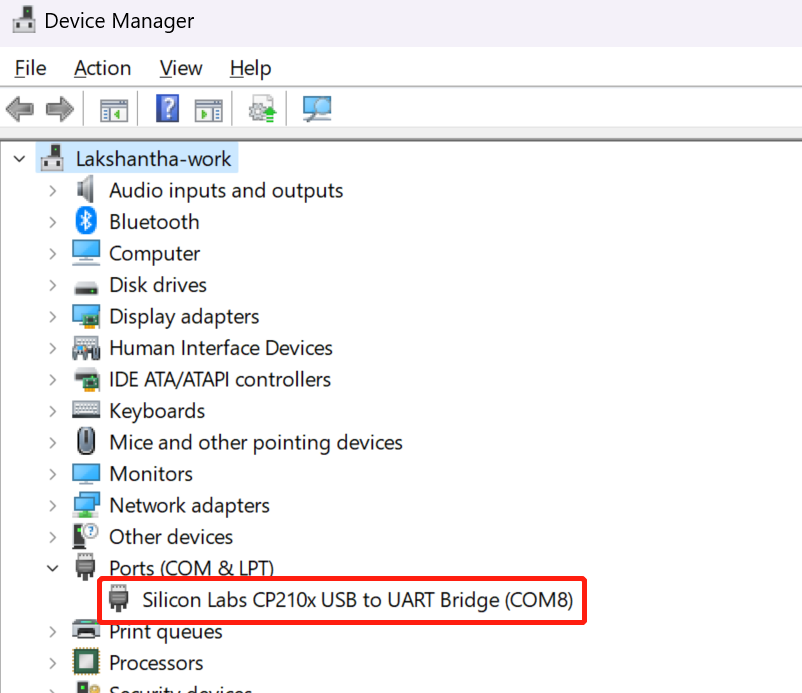
步骤 1: 您可能需要为正在使用的适配器安装驱动程序,或者 Windows 会自动为您安装驱动程序。在 Windows 搜索中输入 Device Manager 打开设备管理器,检查是否可以看到连接的适配器作为 COM 设备。
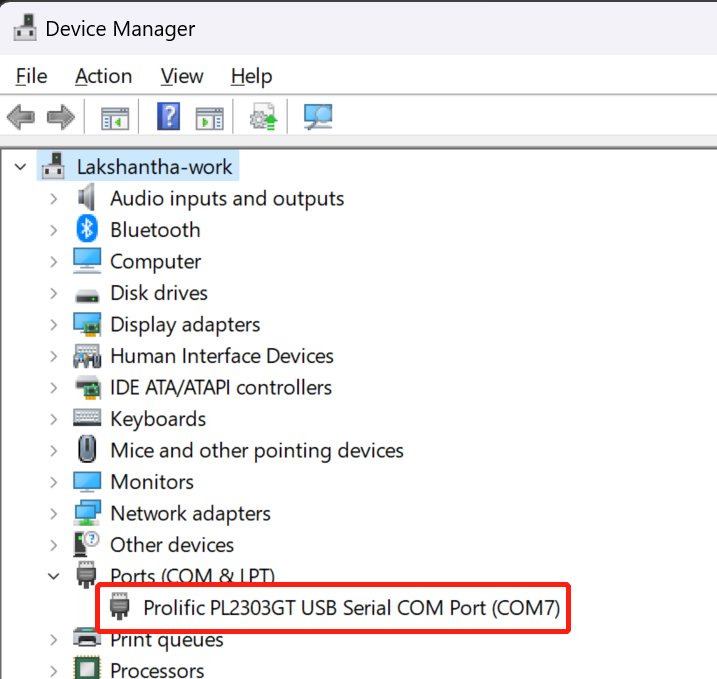
步骤 2: 如果您看不到适配器,需要根据您使用的适配器安装驱动程序。您通常可以在制造商网站上找到这些驱动程序。对于我们使用的适配器,您可以访问此页面,搜索型号 20201 并相应下载驱动程序
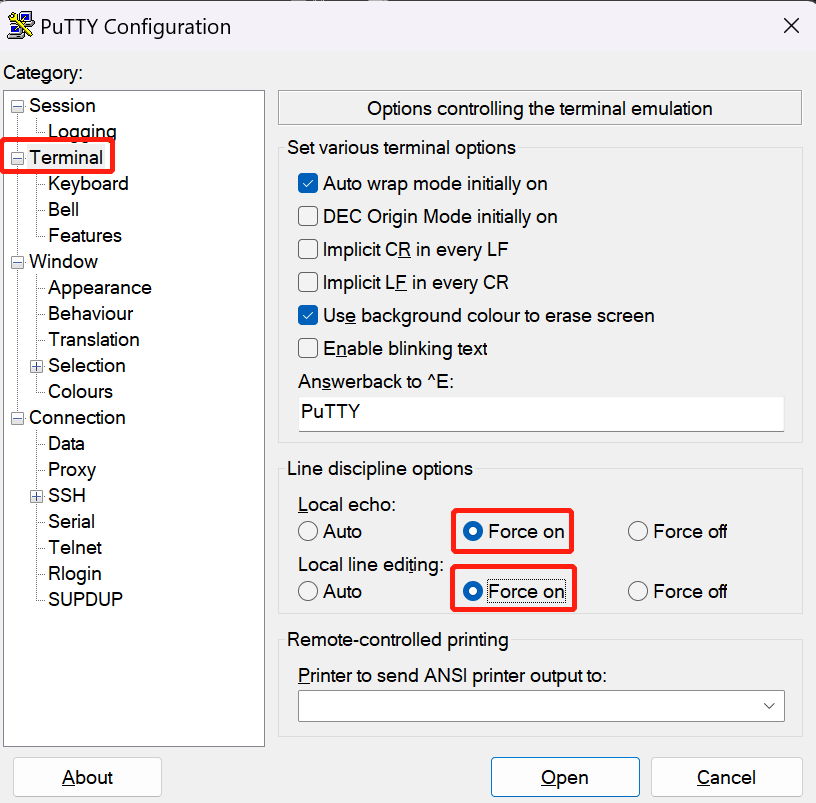
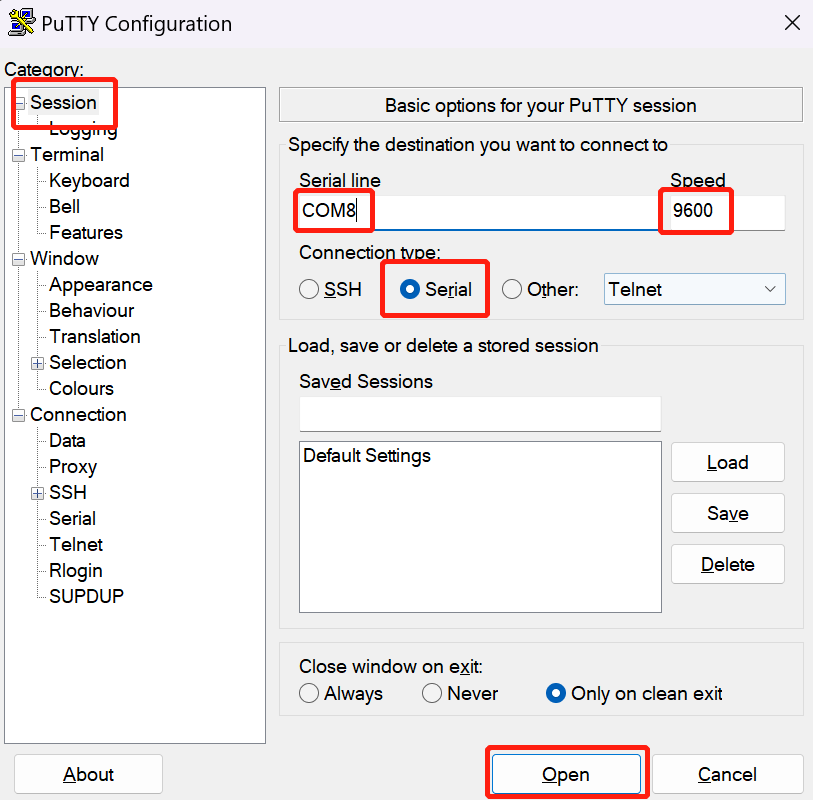
步骤 3: 在 PC 上打开 Putty,选择 Terminal 部分并设置以下内容
- Local echo: Force on
- Local line editing: Force on
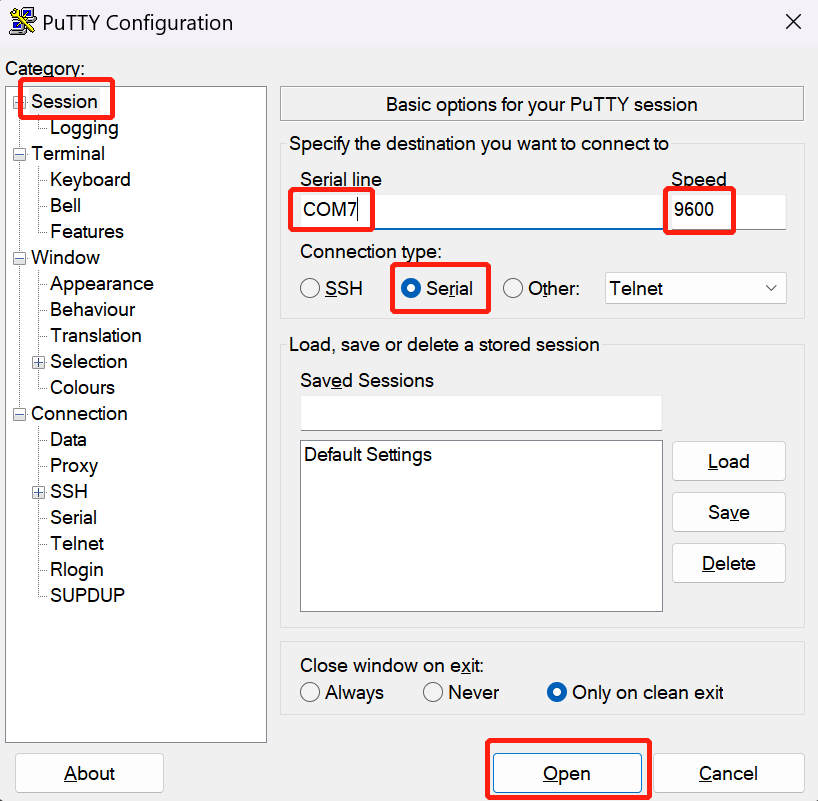
步骤 4: 选择 Session,在 Connection type 下选择 Serial,根据您在 Device Manager 中看到的内容设置串口号,保持速度为默认值(9600)并点击 Open
步骤 5: 在 reTerminal Industrial 终端窗口中,输入以下内容从 reComputer 向 PC 发送信号
- Jetpack5
- Jetpack6
sudo chmod 777 /dev/ttyTHS0
sudo echo "RS232 message from reComputer Industrial" > /dev/ttyTHS0
sudo chmod 777 /dev/ttyTHS1
sudo echo "RS232 message from reComputer Industrial" > /dev/ttyTHS1
现在您将在 Putty 上看到显示的消息

步骤 6: 在 reTerminal Industrial 终端窗口中,输入以下命令等待接收来自 PC 的信号
- Jetpack5
- Jetpack6
sudo cat /dev/ttyTHS0
sudo cat /dev/ttyTHS1
在 Putty 上,输入任何内容,按 ENTER 键,它将显示在 reComputer Industrial 终端窗口中

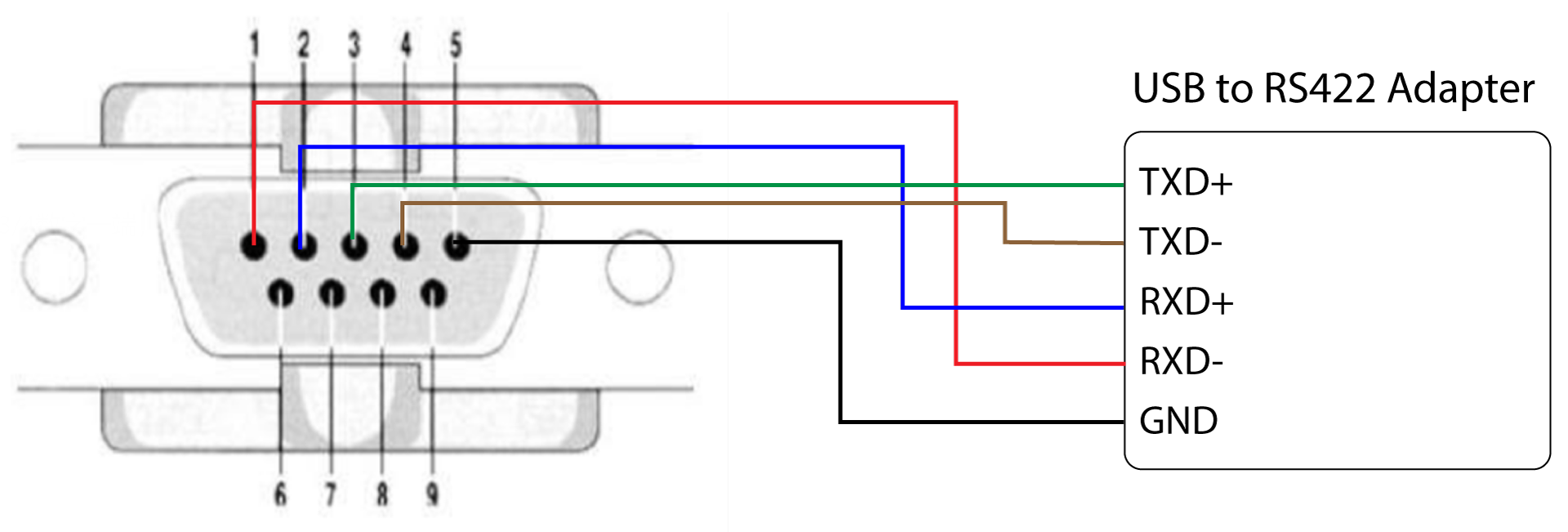
RS422 连接概述
这里您可以使用 USB 转 RS422 适配器来测试接口。我们使用了 DTech USB 转 RS485 适配器 进行测试。
步骤 1: 关闭设备
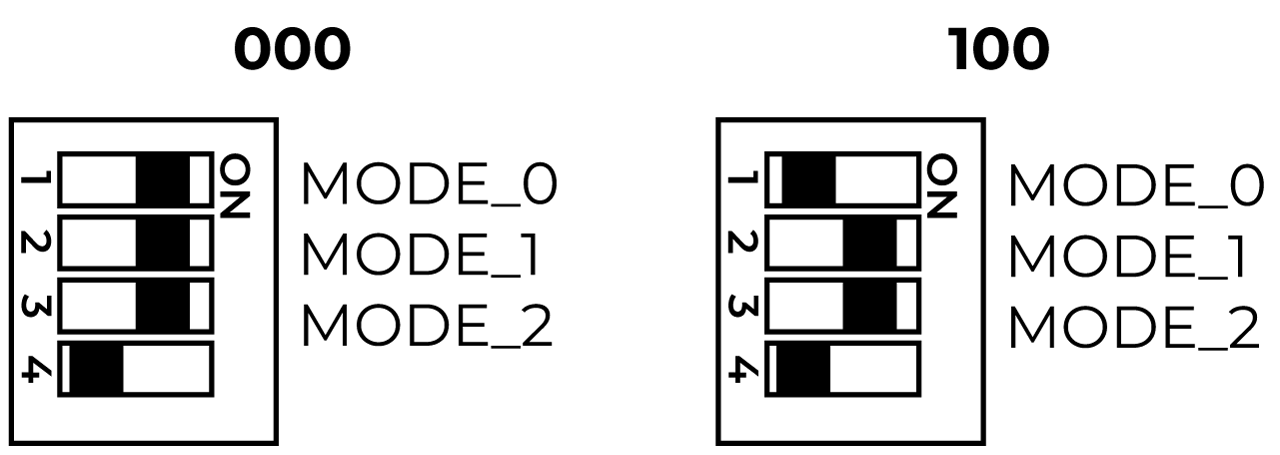
步骤 2: 这里我们有 2 个选项来设置 DIP 开关。可以选择 000 模式或 100 模式。每种模式的开关位置如下所示
步骤 3: 使用跳线将 USB 转 RS422 适配器连接到 DB9 连接器,如下所示。这里我们连接了上面提到的适配器
步骤 4: 将另一端连接到 PC 上的一个 USB 端口
步骤 5: 打开设备
RS422 使用方法
步骤 1: 您可能需要为正在使用的适配器安装驱动程序,或者 Windows 会自动为您安装驱动程序。在 Windows 搜索中输入 Device Manager 打开设备管理器,检查是否可以看到连接的适配器作为 COM 设备。
步骤 2: 如果您看不到适配器,需要根据您使用的适配器安装驱动程序。您通常可以在制造商网站上找到这些驱动程序。对于我们使用的适配器,您可以访问此页面
步骤 3: 在 PC 上打开 Putty,选择 Terminal 部分并设置以下内容
- Local echo: Force on
- Local line editing: Force on
步骤 4: 选择 Session,在 Connection type 下选择 Serial,根据您在 Device Manager 中看到的内容设置串口号,保持速度为默认值(9600)并点击 Open
步骤 5: 在 reTerminal Industrial 终端窗口中,输入以下内容从 reComputer 向 PC 发送信号
- Jetpack5
- Jetpack6
sudo chmod 777 /dev/ttyTHS0
sudo echo "RS422 message from reComputer Industrial" > /dev/ttyTHS0
sudo chmod 777 /dev/ttyTHS1
sudo echo "RS422 message from reComputer Industrial" > /dev/ttyTHS1
现在您将在 Putty 上看到此消息显示
步骤 6: 在 reTerminal Industrial 终端窗口中,输入以下命令等待接收来自 PC 的信号
- Jetpack5
- Jetpack6
sudo cat /dev/ttyTHS0
sudo cat /dev/ttyTHS1
在 Putty 上,输入任何内容,按 ENTER 键,它将显示在 reComputer Industrial 终端窗口中
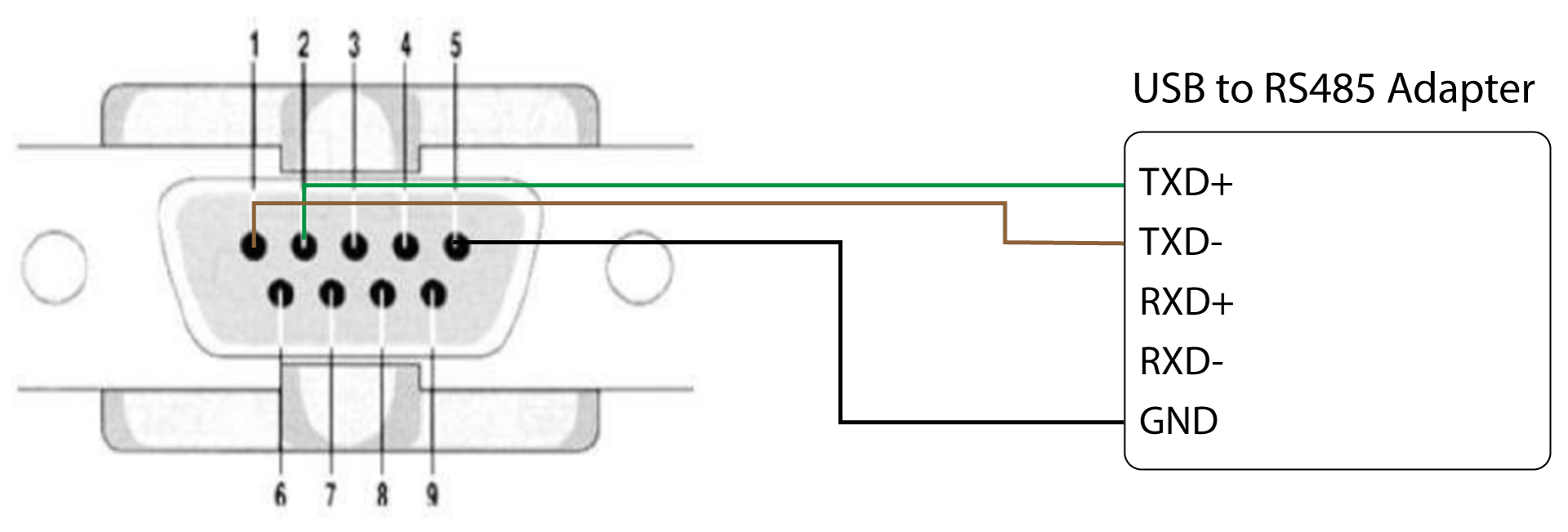
RS485 连接概述
这里您可以使用 USB 转 RS422 适配器来测试接口。我们使用了 DTech USB 转 RS485 适配器 进行测试。
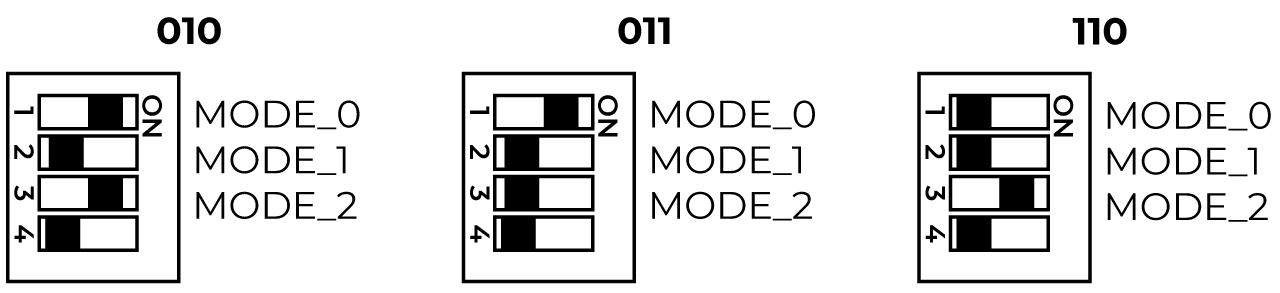
步骤 1: 关闭开发板
步骤 2: 这里我们有 3 个选项来设置 DIP 开关。可以是 010 模式、011 模式或 110 模式。每种模式的开关位置如下所示
步骤 3: 使用跳线将 USB 转 RS422 适配器连接到 DB9 连接器,如下所示。这里我们连接了上面提到的适配器
步骤 4: 将另一端连接到 PC 上的一个 USB 端口
步骤 5: 打开开发板
RS485 使用方法
步骤 1: 您可能需要为正在使用的适配器安装驱动程序,或者 Windows 会自动为您安装驱动程序。在 Windows 搜索中输入 Device Manager 打开设备管理器,检查是否可以看到连接的适配器作为 COM 设备。
步骤 2: 如果您看不到适配器,需要根据您使用的适配器安装驱动程序。您通常可以在制造商网站上找到这些驱动程序。对于我们使用的适配器,您可以访问此页面
步骤 3: 在 PC 上打开 Putty,选择 Terminal 部分,设置如下:
- Local echo: Force on
- Local line editing: Force on
步骤 4: 选择 Session,在 Connection type 下选择 Serial,根据您在 Device Manager 中看到的设置串口号,保持速度为默认值(9600),然后点击 Open
步骤 5: 在 reTerminal Industrial 终端窗口中,输入以下命令从 reComputer 向 PC 发送信号
- Jetpack5
- Jetpack6
sudo su
cd /sys/class/gpio
echo 460 > export
cd PR.04
echo out > direction
echo 0 > value
echo "RS485 message from reComputer Industrial" > /dev/ttyTHS0
sudo chmod 777 /dev/ttyTHS1
sudo gpioset gpiochip0 112=0
echo "RS485 message from reComputer Industrial" > /dev/ttyTHS1
现在您将在 Putty 上看到此消息显示
步骤 6: 在 reTerminal Industrial 终端窗口中,输入以下命令等待接收来自 PC 的信号
- Jetpack5
- Jetpack6
sudo su
cd /sys/class/gpio
echo 460 > export
cd PR.04
echo out > direction
echo 1 > value
cat /dev/ttyTHS0
sudo chmod 777 /dev/ttyTHS1
sudo gpioset gpiochip0 112=1
cat /dev/ttyTHS1
在 Putty 上,输入任何内容,按 ENTER 键,它将显示在 reComputer Industrial 终端窗口中
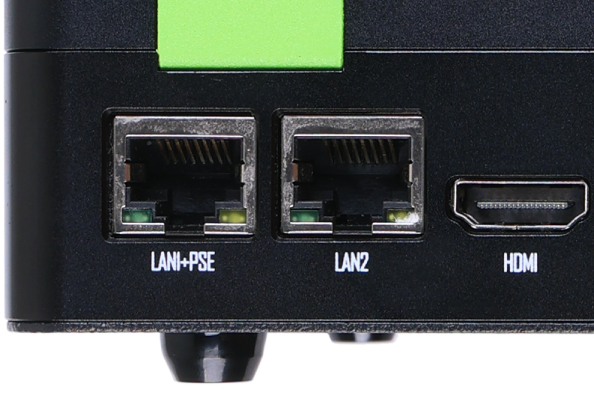
千兆以太网连接器
reComputer Industrial 上有两个千兆以太网(10/100/1000M)连接器,它们的功能不同
- 最左边的连接器直接连接到 Jetson 模块,能够提供 PoE 功能,规格为 PSE 802.3 af, 15W。这意味着您可以将 PoE IP 摄像头或任何其他 PoE 设备连接到此端口,为连接的设备供电。
- 另一个连接器通过 PCIe 转以太网(LAN7430-I/Y9X)模块连接
每个以太网端口上有 2 个 LED(绿色和黄色),指示以下状态
- 绿色 LED:仅在连接到 1000M 网络时点亮
- 黄色 LED:显示网络活动状态
USB
reComputer Industrial 板载 3 个 USB3.2 连接器,具有以下特性:
- 在双层堆叠的 USB 连接器上,上下 USB 端口共享一个限流 IC,总供电能力为最大输出电流 2.1A(单个也可以是 2.1A)。如果超过 2.1A,将进入过流保护状态。
- 在双层堆叠 USB 连接器旁边的单个 USB 连接器上,总供电能力为最大输出电流 2.1A。如果超过 2.1A,将进入过流保护状态。
- Orin NX 模块配备 3 个 USB3.2,其中只有一个在 reComputer 中使用并转换为 3 路。(USB3.1 TYPE-A x2 - J4 和 USB3.1 TYPE-A x1 -J3)。
- 仅支持 USB Host,不支持 Device 模式
- 提供 5V 2.1A
- 支持热插拔
使用方法
我们将解释如何对连接的 USB 闪存驱动器进行简单的基准测试
- 步骤 1: 通过执行以下命令检查写入速度
sudo dd if=/dev/zero of=/dev/$1 bs=100M count=10 conv=fdatasync
- 步骤 2: 通过执行以下命令检查读取速度。确保在执行上述写入速度命令后再执行此命令。
sudo sh -c "sync && echo 3 > /proc/sys/vm/drop_caches"
sudo dd if=/dev/$1 of=/dev/null bs=100M count=10
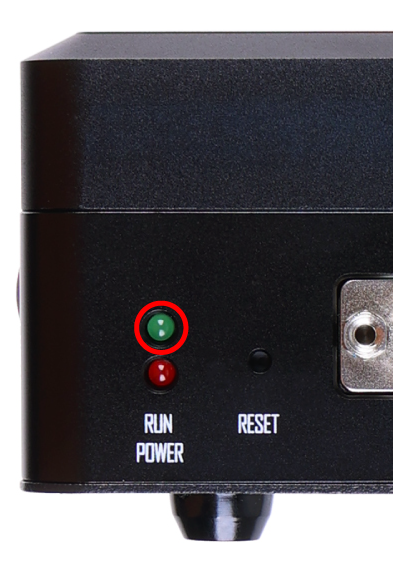
可配置LED
板子上有一个绿色LED,位置如下图所示。默认情况下,它作为显示设备正常运行的LED。但是,您也可以通过系统编程控制这个LED的开启和关闭
使用方法
- Jetpack5
- Jetpack6
步骤 1: 在终端窗口中输入以下命令来访问绿色LED
sudo -i
cd /sys/class/gpio
echo 329 > export
cd PCC.01
echo out > direction
步骤 2: 打开 OFF LED
echo 0 > value
步骤 3: 打开 ON LED
echo 1 > value
如果你已经完成使用LED,你可以执行以下操作
cd ..
echo 329 > unexport
Turn OFF the LED:
sudo gpioset gpiochip1 13=0
打开LED:
sudo gpioset gpiochip1 13=1
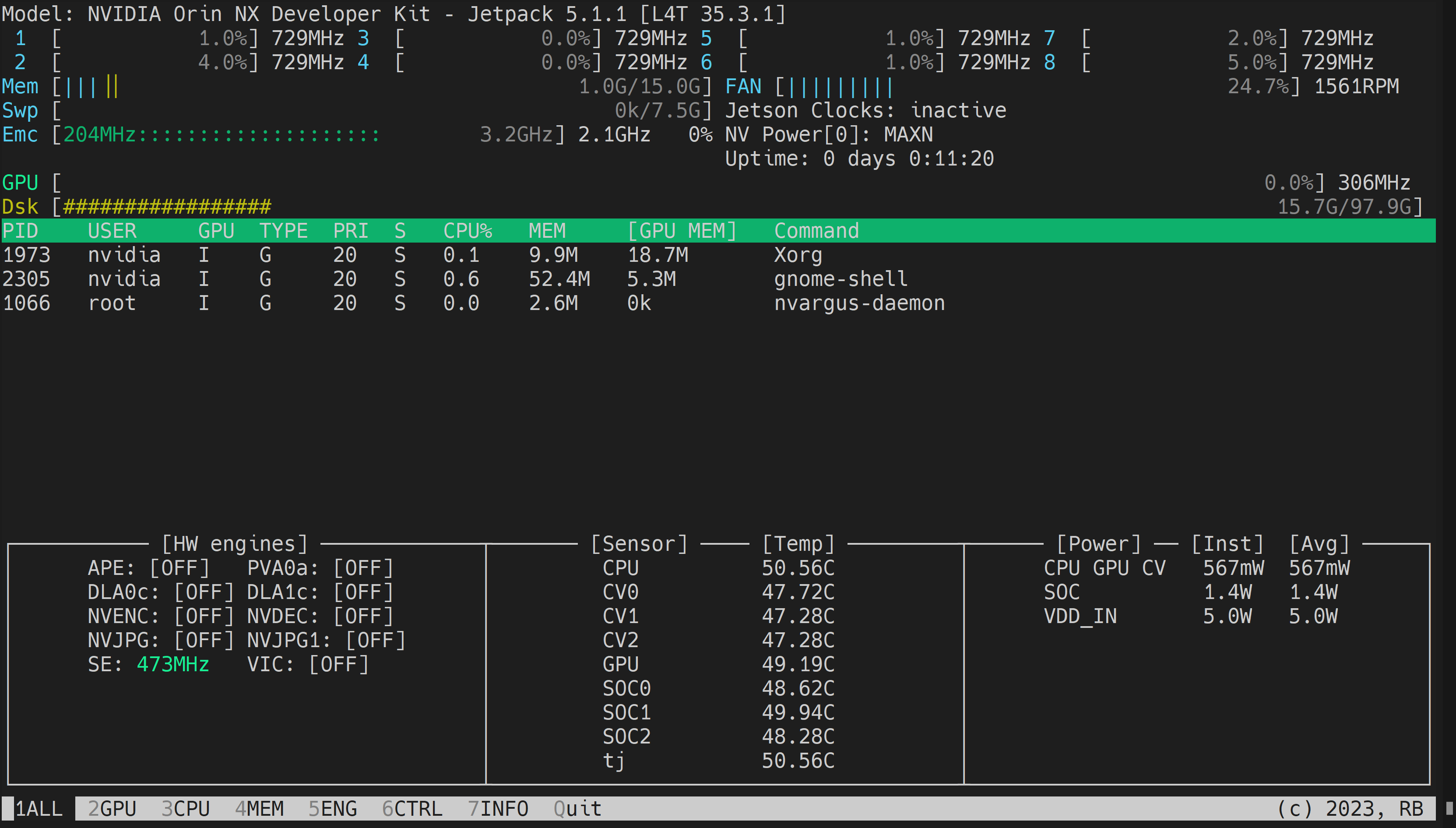
监控系统性能
我们可以使用 jetson stats 应用程序来监控系统组件的温度并检查其他系统详细信息,例如
-
查看 CPU、GPU、RAM 使用率
-
更改电源模式
-
设置为最大时钟频率
-
检查 JetPack 信息
-
步骤 1: 在 reComputer Industrial 终端窗口中,输入以下内容
sudo apt update
sudo apt install python3-pip -y
sudo pip3 install jetson-stats
- 步骤 2: 重启开发板
sudo reboot
- 步骤 3: 在终端中输入以下内容
jtop
现在 jtop 应用程序将按如下方式打开
- 步骤 4: 在这里您可以循环浏览应用程序的不同页面并探索所有功能!
WiFi 和蓝牙
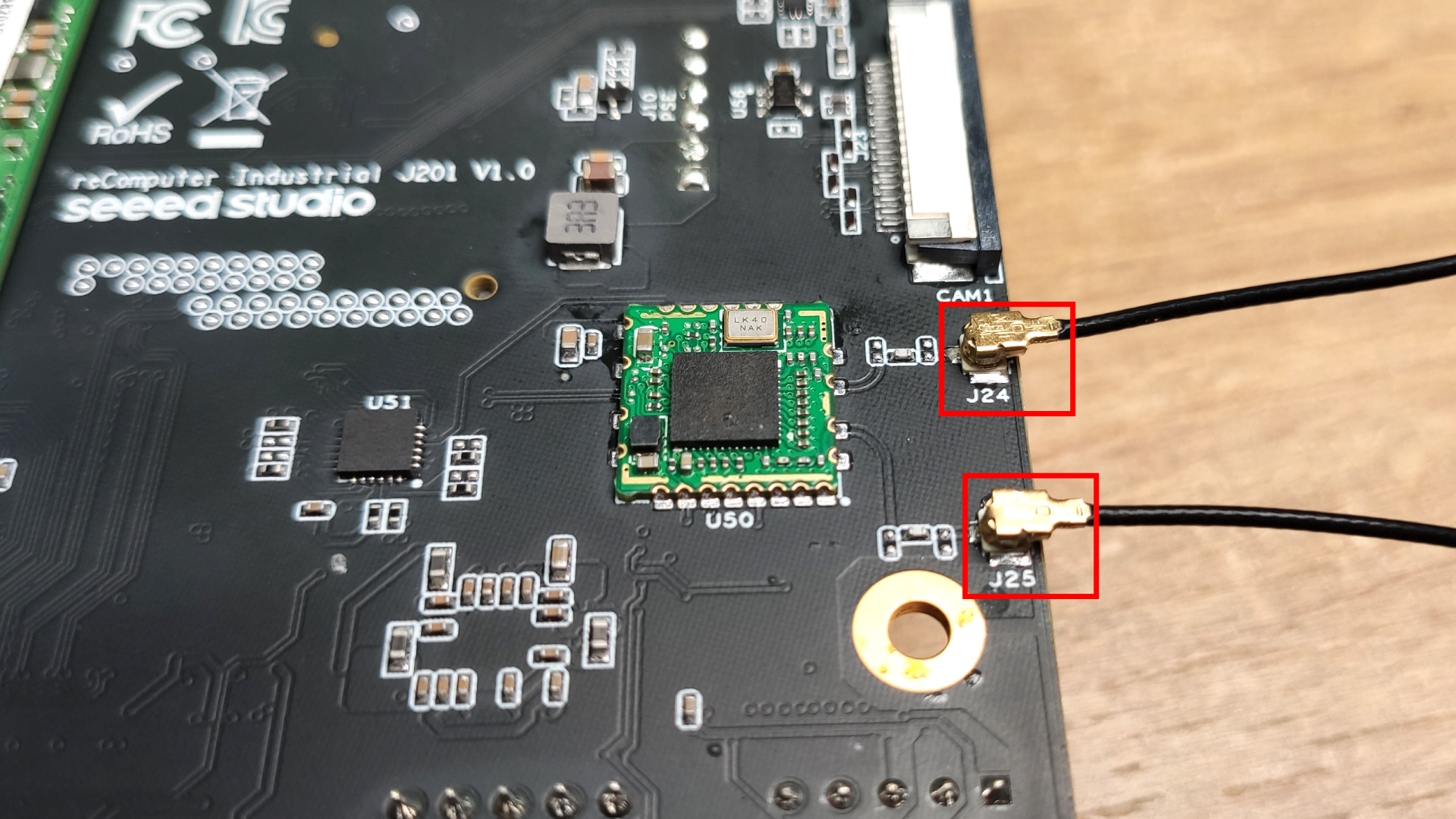
reComputer Industrial 开箱即用时不带有 WiFi 和蓝牙功能。但是 PCB 上有一个预留区域,可以将 WiFi/蓝牙模块焊接到板上。这里我们预留了空间来支持 BL-M8723DU1 模块。
连接概述
- 步骤 1: 如果您想自己焊接 BL-M8723DU1 模块,您可以进行焊接。但我们不建议这样做,因为如果您在过程中损坏了板子,保修将失效。我们建议使用我们的专业服务来帮助您将此模块焊接到板上,您可以发送电子邮件至 [email protected] 提出您的请求。

- 步骤 2: 将两根天线连接到板上的两个天线连接器,用于 WiFi 和蓝牙。这里您需要使用 IPEX 连接器
使用方法
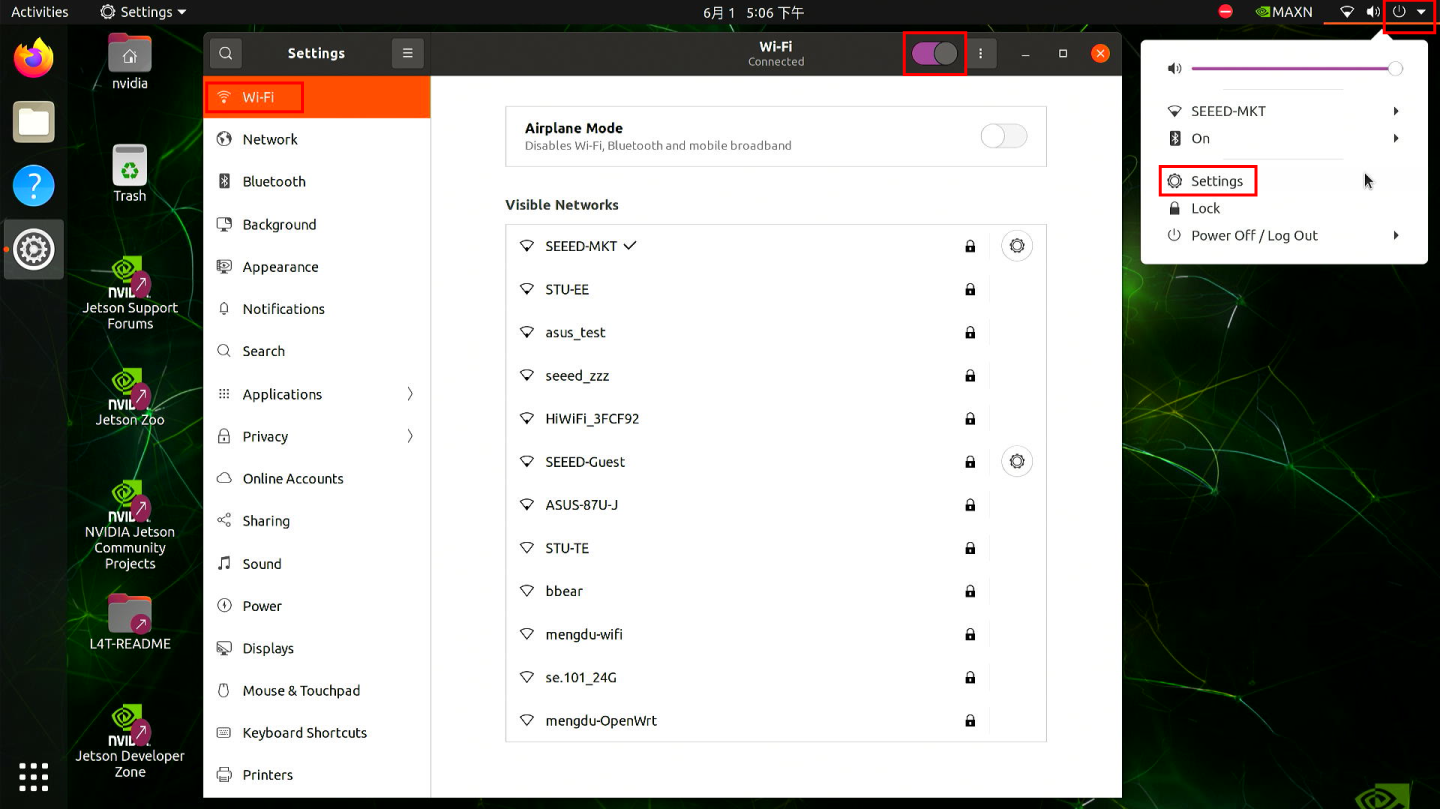
- 步骤 1: 打开板子,一旦设备启动进入 Ubuntu 桌面,点击右上角的下拉菜单,导航到
Settings > Wi-Fi并切换标题栏上的按钮以启用 WiFi。之后选择一个 WiFi 网络,输入所需的密码并连接到它
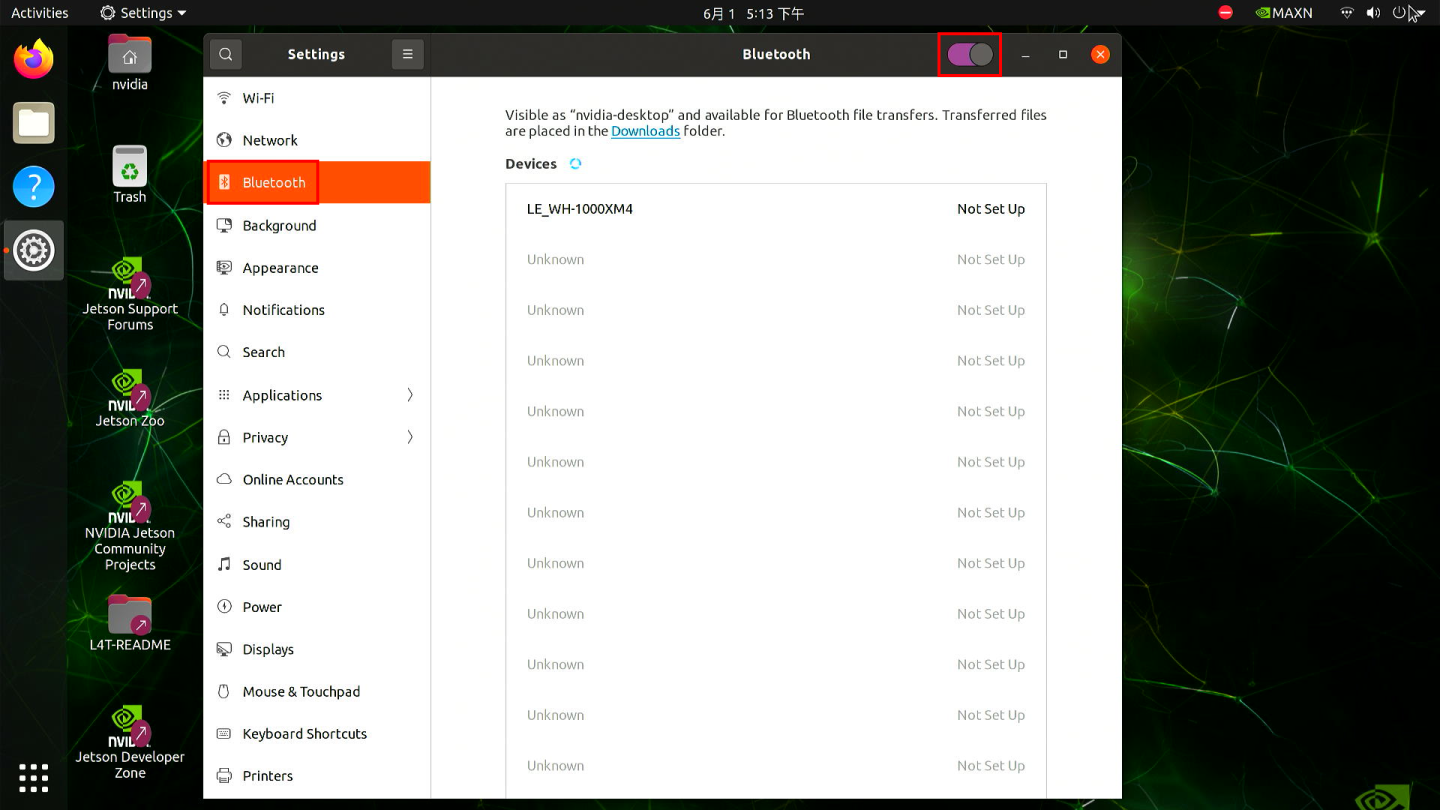
- 步骤 2: 在同一窗口中,选择 Bluetooth 并切换标题栏上的按钮以启用蓝牙。之后选择一个蓝牙设备来连接到它
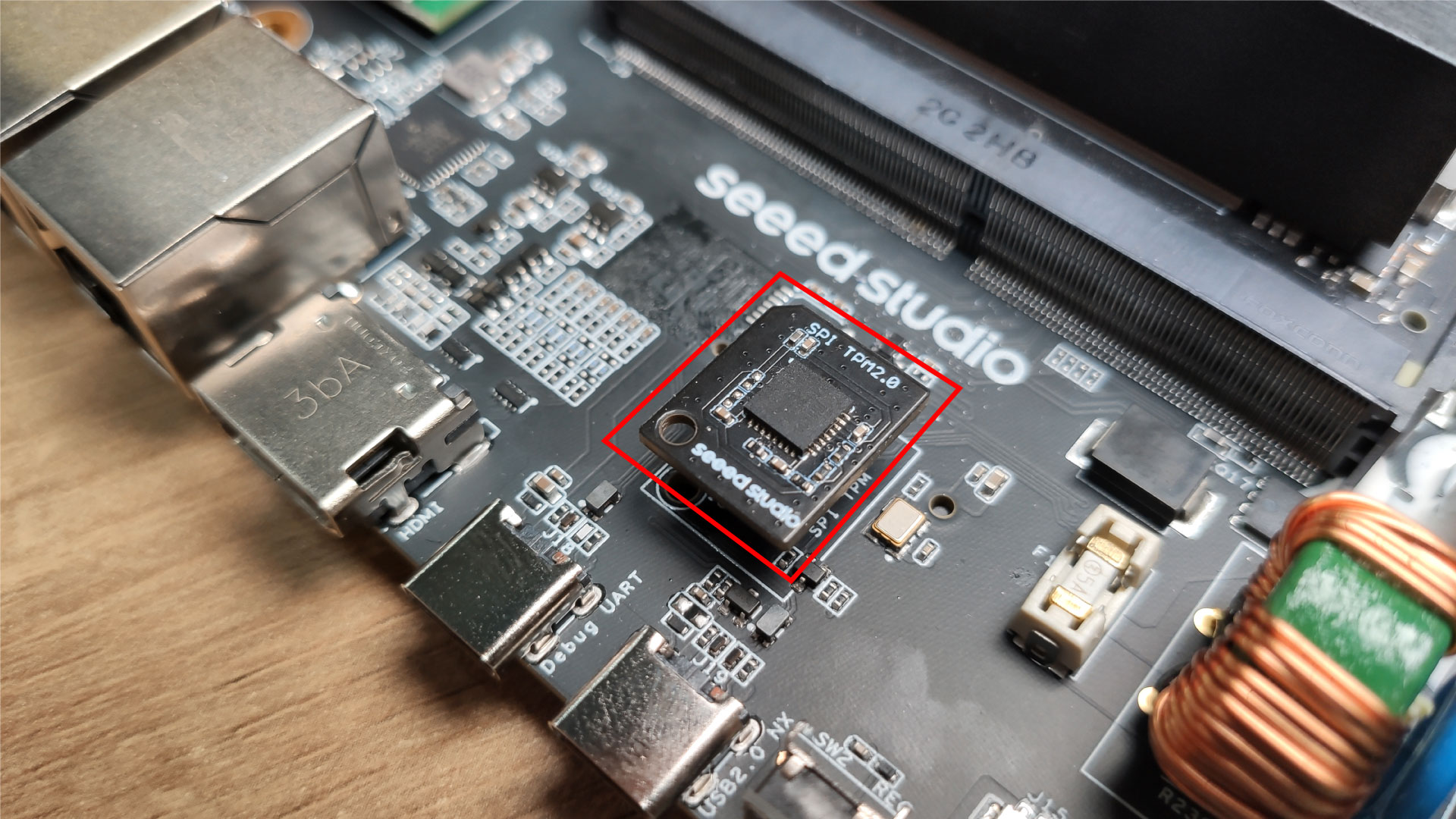
TPM
reComputer Industrial 配备了 TPM 接口来连接外部 TPM 模块。这里我们已经使用基于 Infineon SLB9670 的 TPM2.0 模块进行了测试。
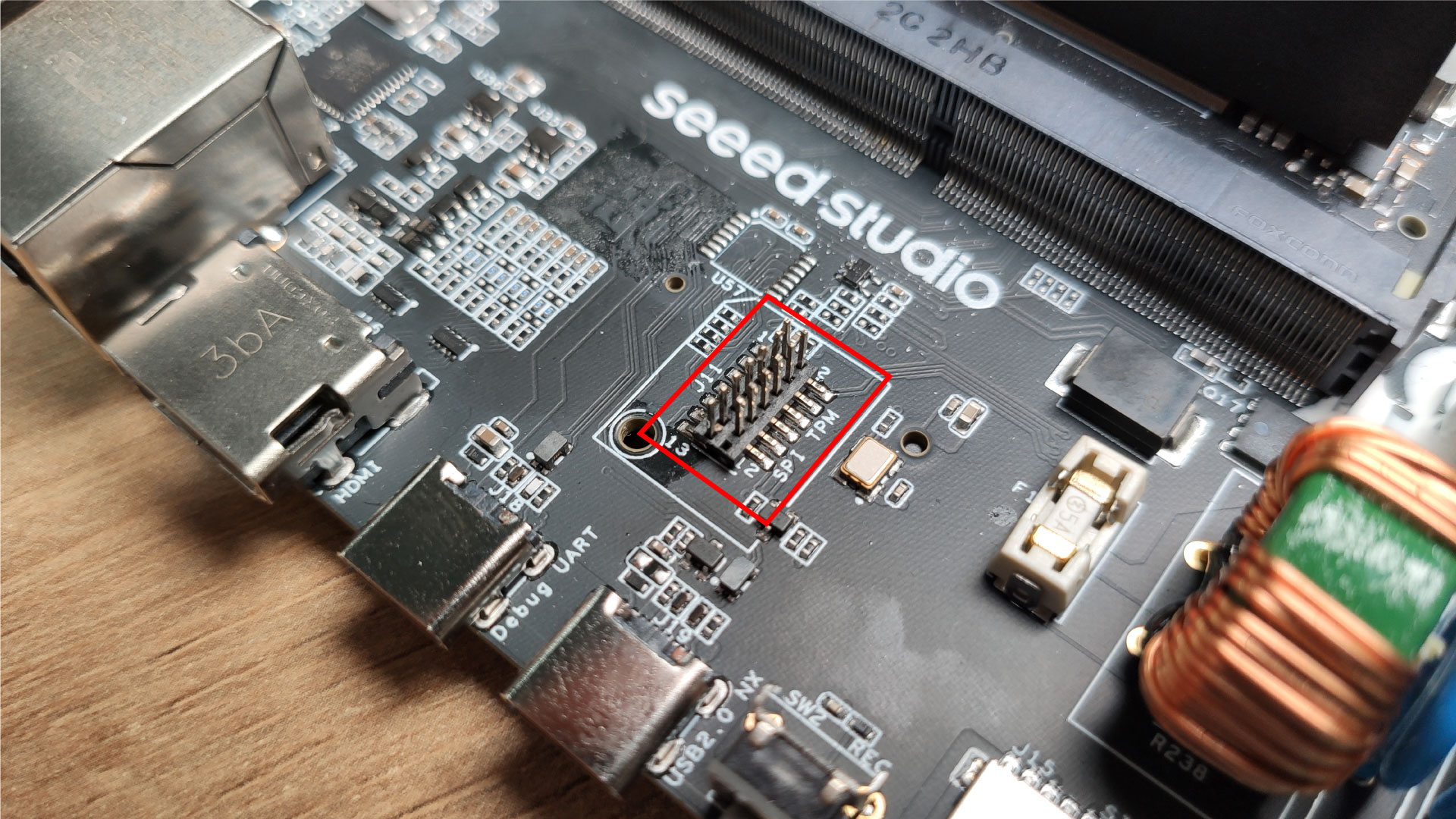
连接概述
将 TPM 模块连接到 TPM 连接器,如下所示
使用方法
通过执行以下命令检查 TPM 模块是否正确加载
sudo dmesg | grep TPM
ls /dev/tpm* -l
您将看到如下输出

reComputer Industrial 上的最大性能
如果您想在 reComputer Industrial 上启用最大性能,请按照以下说明操作
- 步骤 1: 输入以下命令以启用最大功率模式
sudo nvpmodel -m 0
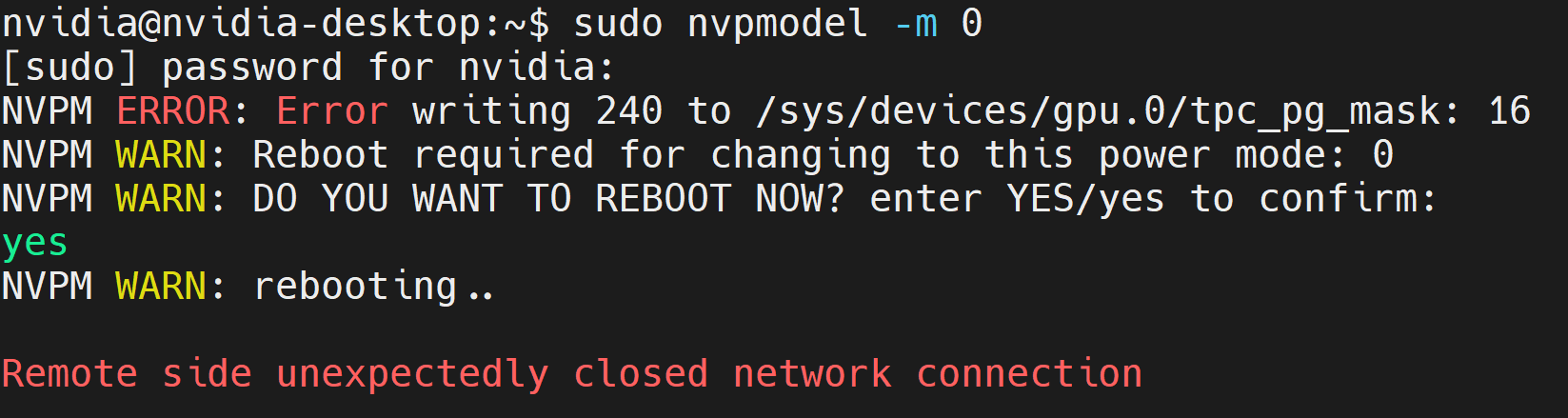
这里会要求输入 YES 来重启开发板
- 步骤 2: 开发板启动后,输入以下命令将 CPU 时钟设置为最大频率
sudo jetson_clocks
GPIO 表
您可以访问 reComputer Industrial 的 GPIO 表来熟悉所有引脚映射。
- Jetpack5
- Jetpack6
在终端中执行以下命令来访问它
sudo cat /sys/kernel/debug/gpio
你将看到输出如下
gpiochip2: GPIOs 300-315, parent: i2c/1-0021, 1-0021, can sleep:
gpio-300 (wl_dis |gpio_xten_pin@0 ) out hi
gpio-301 (hst_wake_wl |gpio_xten_pin@1 ) out hi
gpio-302 (wl_wake_hst |gpio_xten_pin@2 ) out hi ACTIVE LOW
gpio-303 (bt_dis |gpio_xten_pin@3 ) out hi
gpio-304 (hst_wake_bt )
gpio-305 (bt_wake_hst )
gpio-306 (spi0_rst_3v3 |gpio_xten_pin@6 ) out lo ACTIVE LOW
gpio-307 (gpio_pin7 |gpio_xten_pin@7 ) out lo ACTIVE LOW
gpio-308 (can_120R_en )
gpio-309 (M2B_PCIe_rst )
gpio-310 (USB_HUB_rst |gpio_xten_pin@10 ) out hi
gpio-311 (PCIe_ETH_rst )
gpio-312 (M2B_WOWWAN )
gpio-313 (M2B_DPR_3V3 )
gpio-314 (SIM_MUX_SEL )
gpio-315 (gpio_pin15 )
gpiochip1: GPIOs 316-347, parent: platform/c2f0000.gpio, tegra234-gpio-aon:
gpio-316 (PAA.00 )
gpio-317 (PAA.01 )
gpio-318 (PAA.02 )
gpio-319 (PAA.03 )
gpio-320 (PAA.04 )
gpio-321 (PAA.05 |fixed-regulators:reg) out hi
gpio-322 (PAA.06 )
gpio-323 (PAA.07 )
gpio-324 (PBB.00 )
gpio-325 (PBB.01 )
gpio-326 (PBB.02 )
gpio-327 (PBB.03 )
gpio-328 (PCC.00 )
gpio-329 (PCC.01 )
gpio-330 (PCC.02 )
gpio-331 (PCC.03 |mux ) out hi
gpio-332 (PCC.04 )
gpio-333 (PCC.05 )
gpio-334 (PCC.06 )
gpio-335 (PCC.07 )
gpio-336 (PDD.00 )
gpio-337 (PDD.01 )
gpio-338 (PDD.02 )
gpio-339 (PEE.00 )
gpio-340 (PEE.01 )
gpio-341 (PEE.02 )
gpio-342 (PEE.03 )
gpio-343 (PEE.04 |power-key ) in hi IRQ ACTIVE LOW
gpio-344 (PEE.05 )
gpio-345 (PEE.06 )
gpio-346 (PEE.07 )
gpio-347 (PGG.00 )
gpiochip0: GPIOs 348-511, parent: platform/2200000.gpio, tegra234-gpio:
gpio-348 (PA.00 |fixed-regulators:reg) out lo
gpio-349 (PA.01 )
gpio-350 (PA.02 )
gpio-351 (PA.03 )
gpio-352 (PA.04 )
gpio-353 (PA.05 )
gpio-354 (PA.06 )
gpio-355 (PA.07 )
gpio-356 (PB.00 )
gpio-357 (PC.00 )
gpio-358 (PC.01 )
gpio-359 (PC.02 )
gpio-360 (PC.03 )
gpio-361 (PC.04 )
gpio-362 (PC.05 )
gpio-363 (PC.06 )
gpio-364 (PC.07 )
gpio-365 (PD.00 )
gpio-366 (PD.01 )
gpio-367 (PD.02 )
gpio-368 (PD.03 )
gpio-369 (PE.00 )
gpio-370 (PE.01 )
gpio-371 (PE.02 )
gpio-372 (PE.03 )
gpio-373 (PE.04 )
gpio-374 (PE.05 )
gpio-375 (PE.06 )
gpio-376 (PE.07 )
gpio-377 (PF.00 )
gpio-378 (PF.01 )
gpio-379 (PF.02 )
gpio-380 (PF.03 )
gpio-381 (PF.04 )
gpio-382 (PF.05 )
gpio-383 (PG.00 |force-recovery ) in hi IRQ ACTIVE LOW
gpio-384 (PG.01 )
gpio-385 (PG.02 )
gpio-386 (PG.03 )
gpio-387 (PG.04 )
gpio-388 (PG.05 )
gpio-389 (PG.06 )
gpio-390 (PG.07 |cd ) in lo IRQ
gpio-391 (PH.00 )
gpio-392 (PH.01 )
gpio-393 (PH.02 )
gpio-394 (PH.03 )
gpio-395 (PH.04 )
gpio-396 (PH.05 )
gpio-397 (PH.06 )
gpio-398 (PH.07 )
gpio-399 (PI.00 )
gpio-400 (PI.01 )
gpio-401 (PI.02 )
gpio-402 (PI.03 )
gpio-403 (PI.04 )
gpio-404 (PI.05 )
gpio-405 (PI.06 )
gpio-406 (PJ.00 )
gpio-407 (PJ.01 )
gpio-408 (PJ.02 )
gpio-409 (PJ.03 )
gpio-410 (PJ.04 )
gpio-411 (PJ.05 )
gpio-412 (PK.00 )
gpio-413 (PK.01 )
gpio-414 (PK.02 )
gpio-415 (PK.03 )
gpio-416 (PK.04 )
gpio-417 (PK.05 )
gpio-418 (PK.06 )
gpio-419 (PK.07 )
gpio-420 (PL.00 )
gpio-421 (PL.01 )
gpio-422 (PL.02 |nvidia,pex-wake ) in hi ACTIVE LOW
gpio-423 (PL.03 )
gpio-424 (PM.00 )
gpio-425 (PM.01 )
gpio-426 (PM.02 )
gpio-427 (PM.03 )
gpio-428 (PM.04 )
gpio-429 (PM.05 )
gpio-430 (PM.06 )
gpio-431 (PM.07 )
gpio-432 (PN.00 )
gpio-433 (PN.01 )
gpio-434 (PN.02 )
gpio-435 (PN.03 )
gpio-436 (PN.04 )
gpio-437 (PN.05 )
gpio-438 (PN.06 )
gpio-439 (PN.07 )
gpio-440 (PP.00 )
gpio-441 (PP.01 )
gpio-442 (PP.02 )
gpio-443 (PP.03 )
gpio-444 (PP.04 )
gpio-445 (PP.05 )
gpio-446 (PP.06 )
gpio-447 (PP.07 )
gpio-448 (PQ.00 )
gpio-449 (PQ.01 )
gpio-450 (PQ.02 )
gpio-451 (PQ.03 )
gpio-452 (PQ.04 )
gpio-453 (PQ.05 )
gpio-454 (PQ.06 )
gpio-455 (PQ.07 )
gpio-456 (PR.00 )
gpio-457 (PR.01 )
gpio-458 (PR.02 )
gpio-459 (PR.03 )
gpio-460 (PR.04 )
gpio-461 (PR.05 )
gpio-462 (PX.00 )
gpio-463 (PX.01 )
gpio-464 (PX.02 )
gpio-465 (PX.03 )
gpio-466 (PX.04 )
gpio-467 (PX.05 )
gpio-468 (PX.06 )
gpio-469 (PX.07 )
gpio-470 (PY.00 )
gpio-471 (PY.01 )
gpio-472 (PY.02 )
gpio-473 (PY.03 )
gpio-474 (PY.04 )
gpio-475 (PY.05 )
gpio-476 (PY.06 )
gpio-477 (PY.07 )
gpio-478 (PZ.00 )
gpio-479 (PZ.01 |vbus ) in hi IRQ ACTIVE LOW
gpio-480 (PZ.02 )
gpio-481 (PZ.03 )
gpio-482 (PZ.04 )
gpio-483 (PZ.05 )
gpio-484 (PZ.06 |cs_gpio ) out lo
gpio-485 (PZ.07 )
gpio-486 (PAC.00 )
gpio-487 (PAC.01 )
gpio-488 (PAC.02 )
gpio-489 (PAC.03 )
gpio-490 (PAC.04 )
gpio-491 (PAC.05 )
gpio-492 (PAC.06 )
gpio-493 (PAC.07 )
gpio-494 (PAD.00 )
gpio-495 (PAD.01 )
gpio-496 (PAD.02 )
gpio-497 (PAD.03 )
gpio-498 (PAE.00 )
gpio-499 (PAE.01 )
gpio-500 (PAF.00 )
gpio-501 (PAF.01 )
gpio-502 (PAF.02 )
gpio-503 (PAF.03 )
gpio-504 (PAG.00 )
gpio-505 (PAG.01 )
gpio-506 (PAG.02 )
gpio-507 (PAG.03 )
gpio-508 (PAG.04 )
gpio-509 (PAG.05 )
gpio-510 (PAG.06 )
gpio-511 (PAG.07 )
在终端内执行以下命令以访问它。
gpioinfo
你将看到输出如下
seeed@seeed-desktop:~$ gpioinfo
gpiochip0 - 164 lines:
line 0: "PA.00" "regulator-vdd-3v3-sd" output active-high [used]
line 1: "PA.01" unused input active-high
line 2: "PA.02" unused input active-high
line 3: "PA.03" unused input active-high
line 4: "PA.04" unused input active-high
line 5: "PA.05" unused input active-high
line 6: "PA.06" unused input active-high
line 7: "PA.07" unused input active-high
line 8: "PB.00" unused input active-high
line 9: "PC.00" unused input active-high
line 10: "PC.01" unused input active-high
line 11: "PC.02" unused input active-high
line 12: "PC.03" unused input active-high
line 13: "PC.04" unused input active-high
line 14: "PC.05" unused input active-high
line 15: "PC.06" unused input active-high
line 16: "PC.07" unused input active-high
line 17: "PD.00" unused input active-high
line 18: "PD.01" unused input active-high
line 19: "PD.02" unused input active-high
line 20: "PD.03" unused input active-high
line 21: "PE.00" unused input active-high
line 22: "PE.01" unused input active-high
line 23: "PE.02" unused input active-high
line 24: "PE.03" unused input active-high
line 25: "PE.04" unused input active-high
line 26: "PE.05" unused input active-high
line 27: "PE.06" unused input active-high
line 28: "PE.07" unused input active-high
line 29: "PF.00" unused input active-high
line 30: "PF.01" unused input active-high
line 31: "PF.02" unused input active-high
line 32: "PF.03" unused input active-high
line 33: "PF.04" unused input active-high
line 34: "PF.05" unused input active-high
line 35: "PG.00" "Force Recovery" input active-low [used]
line 36: "PG.01" unused input active-high
line 37: "PG.02" "Suspend" input active-low [used]
line 38: "PG.03" unused input active-high
line 39: "PG.04" unused input active-high
line 40: "PG.05" unused input active-high
line 41: "PG.06" unused input active-high
line 42: "PG.07" unused input active-high
line 43: "PH.00" unused input active-high
line 44: "PH.01" unused input active-high
line 45: "PH.02" unused input active-high
line 46: "PH.03" "camera-control-output-low" output active-high [used]
line 47: "PH.04" unused input active-high
line 48: "PH.05" unused input active-high
line 49: "PH.06" unused output active-high
line 50: "PH.07" unused input active-high
line 51: "PI.00" unused output active-high
line 52: "PI.01" unused input active-high
line 53: "PI.02" unused input active-high
line 54: "PI.03" unused input active-high
line 55: "PI.04" unused input active-high
line 56: "PI.05" kernel input active-high [used]
line 57: "PI.06" unused input active-high
line 58: "PJ.00" unused input active-high
line 59: "PJ.01" unused input active-high
line 60: "PJ.02" unused input active-high
line 61: "PJ.03" unused input active-high
line 62: "PJ.04" unused input active-high
line 63: "PJ.05" unused input active-high
line 64: "PK.00" unused input active-high
line 65: "PK.01" unused input active-high
line 66: "PK.02" unused input active-high
line 67: "PK.03" unused input active-high
line 68: "PK.04" unused output active-high
line 69: "PK.05" unused output active-high
line 70: "PK.06" unused input active-high
line 71: "PK.07" unused input active-high
line 72: "PL.00" unused input active-high
line 73: "PL.01" unused input active-high
line 74: "PL.02" unused input active-high
line 75: "PL.03" unused input active-high
line 76: "PM.00" kernel input active-high [used]
line 77: "PM.01" unused input active-high
line 78: "PM.02" unused input active-high
line 79: "PM.03" unused input active-high
line 80: "PM.04" unused input active-high
line 81: "PM.05" unused input active-high
line 82: "PM.06" unused input active-high
line 83: "PM.07" unused input active-high
line 84: "PN.00" unused input active-high
line 85: "PN.01" "interrupt" input active-high [used]
line 86: "PN.02" unused input active-high
line 87: "PN.03" unused input active-high
line 88: "PN.04" unused input active-high
line 89: "PN.05" unused input active-high
line 90: "PN.06" unused input active-high
line 91: "PN.07" unused input active-high
line 92: "PP.00" unused input active-high
line 93: "PP.01" unused input active-high
line 94: "PP.02" unused input active-high
line 95: "PP.03" unused input active-high
line 96: "PP.04" unused input active-high
line 97: "PP.05" unused input active-high
line 98: "PP.06" unused input active-high
line 99: "PP.07" unused input active-high
line 100: "PQ.00" unused input active-high
line 101: "PQ.01" unused input active-high
line 102: "PQ.02" unused input active-high
line 103: "PQ.03" unused output active-high
line 104: "PQ.04" unused input active-high
line 105: "PQ.05" unused input active-high
line 106: "PQ.06" unused input active-high
line 107: "PQ.07" unused input active-high
line 108: "PR.00" unused input active-high
line 109: "PR.01" unused input active-high
line 110: "PR.02" unused input active-high
line 111: "PR.03" unused input active-high
line 112: "PR.04" unused input active-high
line 113: "PR.05" unused input active-high
line 114: "PX.00" kernel input active-high [used]
line 115: "PX.01" kernel input active-high [used]
line 116: "PX.02" unused input active-high
line 117: "PX.03" unused input active-high
line 118: "PX.04" unused input active-high
line 119: "PX.05" unused input active-high
line 120: "PX.06" unused input active-high
line 121: "PX.07" unused input active-high
line 122: "PY.00" unused input active-high
line 123: "PY.01" unused input active-high
line 124: "PY.02" unused input active-high
line 125: "PY.03" unused input active-high
line 126: "PY.04" unused input active-high
line 127: "PY.05" unused input active-high
line 128: "PY.06" unused input active-high
line 129: "PY.07" unused input active-high
line 130: "PZ.00" unused input active-high
line 131: "PZ.01" "vbus" input active-low [used]
line 132: "PZ.02" unused input active-high
line 133: "PZ.03" unused input active-high
line 134: "PZ.04" unused input active-high
line 135: "PZ.05" unused input active-high
line 136: "PZ.06" "spi0 CS0" output active-low [used]
line 137: "PZ.07" unused input active-high
line 138: "PAC.00" unused output active-high
line 139: "PAC.01" unused input active-high
line 140: "PAC.02" unused input active-high
line 141: "PAC.03" unused input active-high
line 142: "PAC.04" unused input active-high
line 143: "PAC.05" unused input active-high
line 144: "PAC.06" unused input active-high
line 145: "PAC.07" unused input active-high
line 146: "PAD.00" unused input active-high
line 147: "PAD.01" unused input active-high
line 148: "PAD.02" unused input active-high
line 149: "PAD.03" unused input active-high
line 150: "PAE.00" unused input active-high
line 151: "PAE.01" unused input active-high
line 152: "PAF.00" unused input active-high
line 153: "PAF.01" unused input active-high
line 154: "PAF.02" unused input active-high
line 155: "PAF.03" unused input active-high
line 156: "PAG.00" unused input active-high
line 157: "PAG.01" unused input active-high
line 158: "PAG.02" unused input active-high
line 159: "PAG.03" unused input active-high
line 160: "PAG.04" unused input active-high
line 161: "PAG.05" unused input active-high
line 162: "PAG.06" unused input active-high
line 163: "PAG.07" unused input active-high
gpiochip1 - 32 lines:
line 0: "PAA.00" unused input active-high
line 1: "PAA.01" unused input active-high
line 2: "PAA.02" unused input active-high
line 3: "PAA.03" unused input active-high
line 4: "PAA.04" unused output active-high
line 5: "PAA.05" "regulator-vdd-3v3-pcie" output active-high [used]
line 6: "PAA.06" unused input active-high
line 7: "PAA.07" unused input active-high
line 8: "PBB.00" unused input active-high
line 9: "PBB.01" unused input active-high
line 10: "PBB.02" unused input active-high
line 11: "PBB.03" unused output active-high
line 12: "PCC.00" unused output active-high
line 13: "PCC.01" unused output active-high
line 14: "PCC.02" unused output active-high
line 15: "PCC.03" "mux" output active-high [used]
line 16: "PCC.04" unused input active-high
line 17: "PCC.05" unused input active-high
line 18: "PCC.06" unused input active-high
line 19: "PCC.07" unused input active-high
line 20: "PDD.00" unused input active-high
line 21: "PDD.01" unused input active-high
line 22: "PDD.02" unused input active-high
line 23: "PEE.00" unused input active-high
line 24: "PEE.01" unused input active-high
line 25: "PEE.02" unused input active-high
line 26: "PEE.03" unused input active-high
line 27: "PEE.04" "Power" input active-low [used]
line 28: "PEE.05" unused input active-high
line 29: "PEE.06" unused input active-high
line 30: "PEE.07" unused input active-high
line 31: "PGG.00" unused input active-high
gpiochip2 - 16 lines:
line 0: "wl_dis" "gpio_xten_pin@0" output active-high [used]
line 1: "hst_wake_wl" "gpio_xten_pin@1" output active-high [used]
line 2: "wl_wake_hst" "gpio_xten_pin@2" output active-low [used]
line 3: "bt_dis" "gpio_xten_pin@3" output active-high [used]
line 4: "hst_wake_bt" unused input active-high
line 5: "bt_wake_hst" unused input active-high
line 6: "spi0_rst_3v3" "gpio_xten_pin@6" output active-low [used]
line 7: "gpio_pin7" "gpio_xten_pin@7" output active-low [used]
line 8: "can_120R_en" unused input active-high
line 9: "M2B_PCIe_rst" unused input active-high
line 10: "USB_HUB_rst" "gpio_xten_pin@10" output active-high [used]
line 11: "PCIe_ETH_rst" unused input active-high
line 12: "M2B_WOWWAN" unused input active-high
line 13: "M2B_DPR_3V3" unused input active-high
line 14: "SIM_MUX_SEL" unused input active-high
line 15: "gpio_pin15" unused input active-high
资源
技术支持与产品讨论
感谢您选择我们的产品!我们在这里为您提供不同的支持,以确保您使用我们产品的体验尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。