reServer Industrial 入门指南

reServer Industrial 系列提供无风扇、紧凑型、支持 AI 的 NVR(网络视频录像机)服务器,内置 NVIDIA Jetson™ Orin Nano/Orin NX 模组,AI 性能范围从 20 TOPS 到 100 TOPS。reServer Industrial 预装 Jetpack 5.1.1,简化开发,非常适合构建具备强大 AI 功能的 VMS(视频管理系统),为智慧城市、安全、工业自动化、智能工厂等行业带来数字化转型。
reServer Industrial 配备被动散热片并采用无风扇设计,非常适合在苛刻环境中使用。被动散热片无需风扇即可实现高效散热,降低因灰尘或其他污染物导致元件故障的风险。无风扇设计还可降低噪音水平和功耗,适用于对噪音敏感的环境,并最大限度减少能源成本。
reServer Industrial 具有 5 个 RJ45 GbE 接口,其中 4 个为 PoE PSE 接口,可通过以太网为 IP 摄像机等设备供电。这消除了对单独电源的需求,使在没有现成电源插座的区域部署网络设备更加容易。剩余的 GbE 接口用于连接网络交换机或路由器,从而实现与网络上其他设备的通信以及访问互联网。
特性
- 无风扇紧凑型边缘 AI 服务器: 由 NVIDIA Jetson™ Orin Nano/Orin NX 模组驱动,AI 性能范围从 20 TOPS 到 100 TOPS,在 0.7m/s 气流下支持 -20 ~ 60°C 更宽温度范围
- 多路流处理: 5× GbE RJ45(其中 4 个为 802.3af PSE),可对多路流进行实时处理
- 可扩展存储: 2 个 2.5" SATA HDD/SSD 硬盘位,外加一个用于 NVMe SSD 的 M.2 2280 插槽
- 工业接口: 包含 COM 接口、DI/DO 接口、CAN 接口、USB 3.1,以及可选的 TPM2.0 模块
- 混合连接: 支持 5G/4G/LTE/LoRaWAN®(模块可选),带 Nano SIM 卡槽
- 认证: FCC、CE、UKCA、ROHS、KC
规格参数
| 产品名称 | reServer Industrial J4012 | reServer Industrial J4011 | reServer Industrial J3011 | reServer Industrial J3010 | |
|---|---|---|---|---|---|
| NVIDIA Jetson 模组 | Orin NX 16GB | Orin NX 8GB | Orin Nano 8GB | Orin Nano 4GB | |
| SKU | 114110247 | 114110248 | 114110249 | 114110250 | |
| 处理器 系统 | AI 性能 | 100 TOPS | 70 TOPS | 40 TOPS | 20 TOPS |
| GPU | 1024 核 NVIDIA Ampere 架构 GPU,带 32 个 Tensor Core | 512 核 NVIDIA Ampere 架构 GPU,带 16 个 Tensor Core | |||
| CPU | 8 核 Arm® Cortex®-A78AE v8.2 64 位 CPU;2MB L2 + 4MB L3 | 6 核 Arm® Cortex®-A78AE v8.2 64 位 CPU,1.5MB L2 + 4MB L3 | |||
| 内存 | 16GB 128-bit LPDDR5 102.4GB/s | 8GB 128-bit LPDDR5 102.4GB/s | 8GB 128-bit LPDDR5 68 GB/s | 4GB 64-bit LPDDR5 34 GB/s | |
| 视频编码 | 支持标准:H.265(HEVC)、H.264、AV1 1×4K60(H.265)| 3×4K30(H.265)| 6×1080p60(H.265)| 12×1080p30(H.265) | 1080p30 由 1-2 个 CPU 核心支持 | |||
| 视频解码 | 支持标准:H.265(HEVC)、H.264、VP9、AV1 1×8K30(H.265)| 2×4K60(H.265)| 4×4K30(H.265)| 9×1080p60(H.265)| 18×1080p30(H.265) | 支持标准:H.265(HEVC)、H.264、VP9、AV1 1×4K60(H.265)| 2×4K30(H.265)| 5×1080p60(H.265)| 11×1080p30(H.265) | |||
| 存储 | eMMC | - | |||
| 扩展 | M.2 Key M(2280)PCIe Gen4.0 SSD(内含 128G M.2 NVMe SSD) | ||||
| I/O | 以太网 | 1× LAN0 RJ45 GbE(10/100/1000Mbps) | |||
| 4× LAN RJ45 GbE PoE(PSE 802.3 af 15 W,10/100/1000Mbps) | |||||
| USB | 4× USB3.1,1× USB2.0 Type C(设备模式),1× USB2.0 Type C 用于调试 UART 和 RP2040 | ||||
| DI/DO | 4×DI,4×DO,3×GND_DI,2×GND_DO,1×GND_ISO,1×CAN | ||||
| COM | 1× DB9(RS232/RS422/RS485) | ||||
| 显示 | 1×HDMI 2.1 Type A 7680x4320@30 Hz | 1×HDMI 1.4 Type A 3840x2160@30 Hz | |||
| SATA | 2 个硬盘位,支持 2.5" SATA HDD/SSD(SATA III 6.0Gbps) | ||||
| SIM | 1× Nano SIM 卡槽 | ||||
| 按键 | 复位按键、恢复按键 | ||||
| 扩展 | Mini PCIe | Mini PCIe,用于 LoRaWAN®/4G/Series 无线(模块可选) | |||
| M.2 Key B | M.2 Key B(3042/3052)支持 4G/5G(模块可选) | ||||
| 风扇 | 无风扇,被动散热片;1× 风扇连接器(5V PWM) | ||||
| TPM | 1× TPM 2.0 接口(模块可选) | ||||
| RTC | 1× RTC 插座(内含 CR1220),×RTC 2 针 | ||||
| 电源 | 电源输入 | DC 12V-36V 接线端子 2 针 | |||
| 电源适配器 | 24V /5A 电源适配器(不含电源线) | ||||
| 机械特性 | 尺寸(宽 x 深 x 高) | 194.33mm×187mm×95.5mm | |||
| 重量 | 2.8kg | ||||
| 安装方式 | 桌面、DIN 导轨、VESA | ||||
| 工作温度 | -20 ~ 60°C,0.7m/s | ||||
| 工作湿度 | 95% @ 40 °C(无冷凝) | ||||
| 存储温度 | -40 ~ 85°C | ||||
| 存储湿度 | 60°C@ 95% RH(无冷凝) | ||||
| 振动 | 3 Grms @ 5 ~ 500 Hz,随机,1 小时/轴 | ||||
| 冲击 | 50G 峰值加速度(11 ms 持续时间,eMMC、microSD 或 mSATA) | ||||
| 操作系统 | 预装 Jetpack 5.1.1(及以上)(提供带板级支持包的 Linux 操作系统) | ||||
| 认证 | FCC、CE、RoHS、UKCA、KC | ||||
| 质保 | 2 年 | ||||
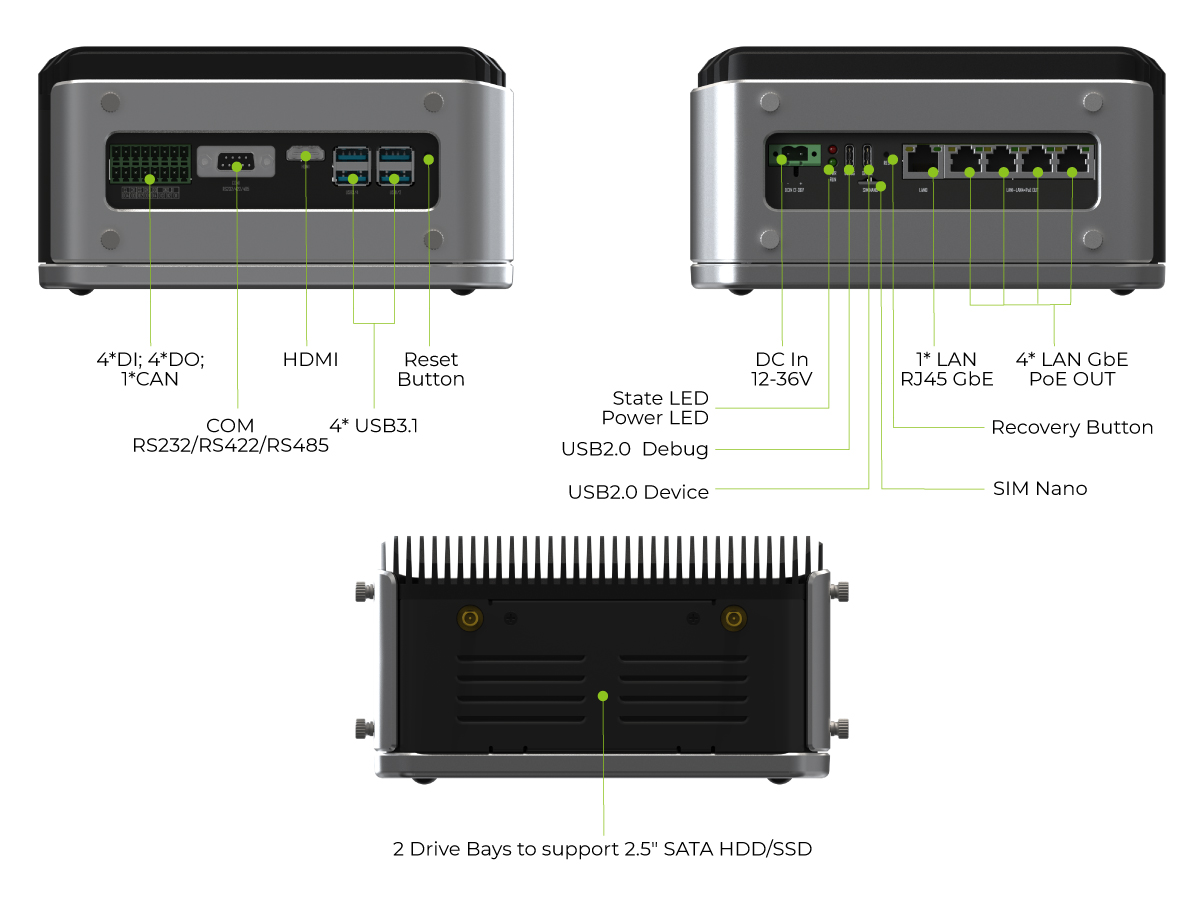
硬件概览
完整系统
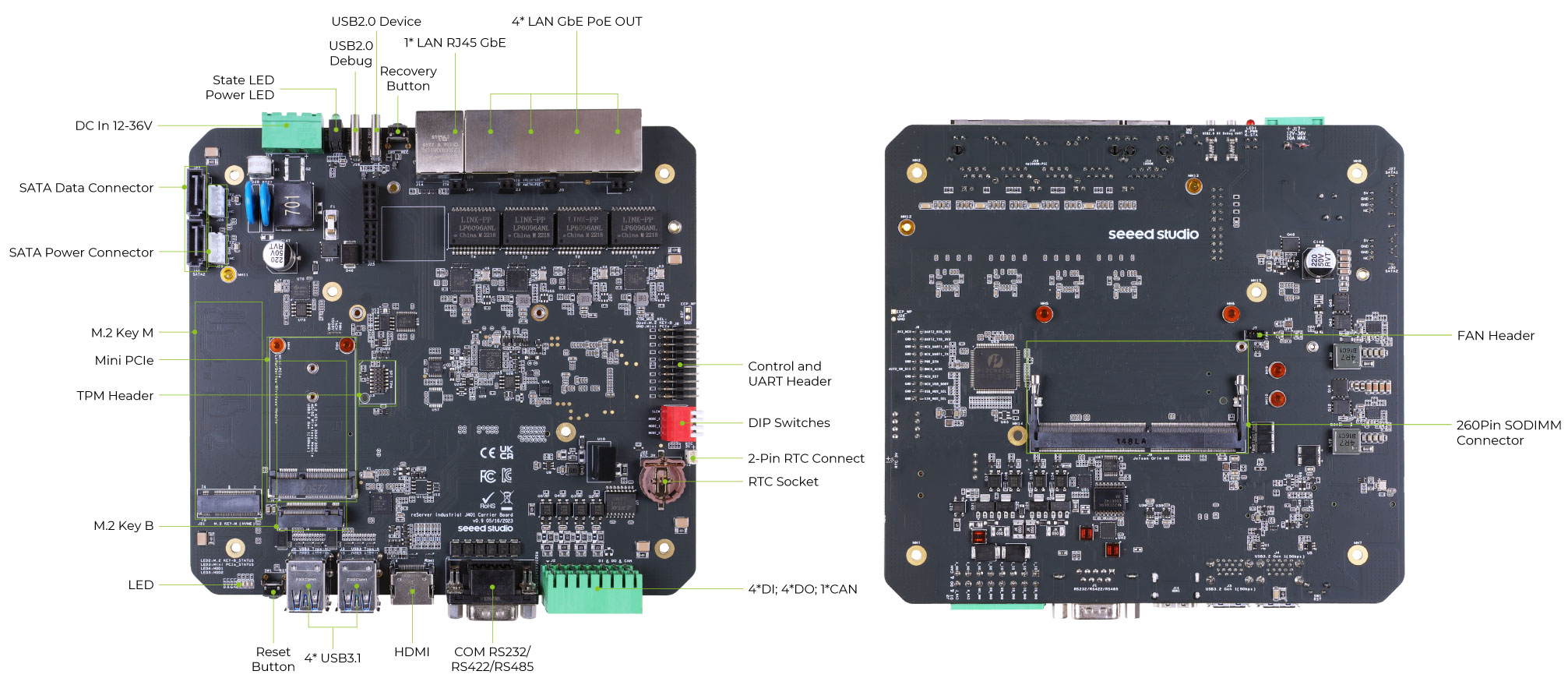
载板
刷写 JetPack
设备将预装 JetPack 5.1.1。如果没有特殊需求,则无需重新刷写系统。
reServer Industrial 在 128GB SSD 上预装了 JetPack 5.1.1 以及必要的驱动程序。这包括 CUDA、CUDNN 和 TensorRT 等 SDK 组件。不过,如果你想将 Jetpack 重新刷写到随附 SSD 或新的 SSD 上,可以按照以下步骤进行。目前我们只提供 JP5.1.1 的指导,未来会持续更新。
前置准备
在开始使用 reServer Industrial 之前,你需要准备以下硬件
- reServer Industrial
- 随机附带的带电源线电源适配器(US version 或 EU version)
- Ubuntu 主机电脑(原生安装或使用 VMware Workstation Player 的虚拟机)
- USB Type-C 数据传输线
- 外接显示器
- HDMI 线
- 键盘和鼠标
进入强制恢复模式
现在你需要让 reServer Industrial 板进入恢复模式以便烧录设备。使用 USB Type-C 线连接 DEVICE 端口和你的电脑。使用一根针插入 REC 孔按下恢复按钮,并在按住该按钮的同时,将附带的 2-Pin Terminal block power connector 连接到板上的电源接口(请确保使用 2 颗螺丝将端子固定到位),然后连接附带的电源适配器和电源线以开启主板
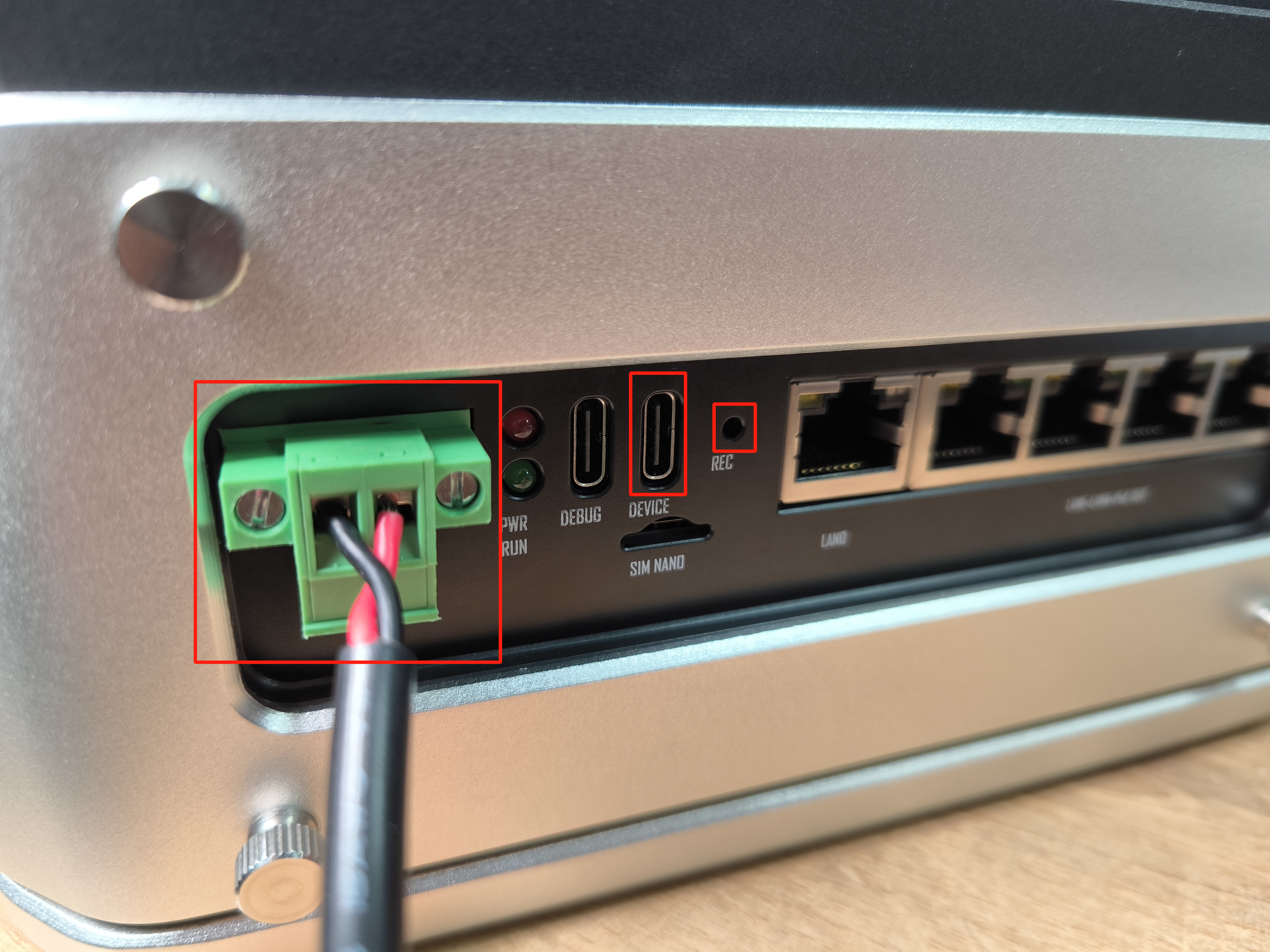
确保在按住 RECOVERY 按钮的同时给设备上电,否则它不会进入恢复模式
在 Ubuntu 主机电脑上,打开一个终端窗口并输入命令 lsusb。如果返回的内容中根据你使用的 Jetson SoM 出现以下其中一项输出,则说明主板已进入强制恢复模式。
- 对于 Orin NX 16GB:0955:7323 NVidia Corp
- 对于 Orin NX 8GB:0955:7423 NVidia Corp
- 对于 Orin Nano 8GB:0955:7523 NVidia Corp
- 对于 Orin Nano 4GB:0955:7623 NVidia Corp
不同的烧录方法
这里我们提供 2 种不同的烧录方法。
- 下载我们已经准备好的完整系统镜像(包含 NVIDIA JetPack、硬件外设驱动),并烧录到设备
- 下载官方 NVIDIA L4T,使用附带的硬件外设驱动,并烧录到设备
第一种方法的下载大小约为 14GB,第二种方法的下载大小约为 3GB
- Method 1
- 方法 2
下载系统镜像
- 步骤 1: 下载与你所使用主板对应的系统镜像到 Ubuntu 电脑。
| Device | JetPack Version | L4T Version | Image Link | Alternative Image Link |
|---|---|---|---|---|
| reServer Industrial J4012 | 5.1.1 | 35.3.1 | Download1 | Download2 |
| 5.1.3 | 35.5.0 | Download1 | ||
| 6.0 | 36.3 | Download1 | Download2 | |
| 6.1 | 36.4 | Download1 | ||
| 6.2 | 36.4.3 | Download1 | ||
| reServer Industrial J4011 | 5.1.1 | 35.3.1 | Download1 | Download2 |
| 5.1.3 | 35.5.0 | Download1 | ||
| 6.0 | 36.3 | Download1 | Download2 | |
| 6.1 | 36.4 | Download1 | ||
| 6.2 | 36.4.3 | Download1 | ||
| reServer Industrial J3011 | 5.1.1 | 35.3.1 | Download1 | Download2 |
| 5.1.3 | 35.5.0 | Download1 | ||
| 6.0 | 36.3 | Download1 | Download2 | |
| 6.1 | 36.4 | Download1 | ||
| 6.2 | 36.4.3 | Download1 | ||
| reServer Industrial J3010 | 5.1.1 | 35.3.1 | Download1 | 下载 2 |
| 5.1.3 | 35.5.0 | 下载 1 | ||
| 6.0 | 36.3 | 下载 1 | 下载 2 | |
| 6.1 | 36.4 | 下载 1 | ||
| 6.2 | 36.4.3 | 下载 1 |
- Download1 和 Download2 中的镜像文件是相同的。你可以选择下载速度更快的链接。
- Step 2: 解压生成的文件
tar -xvf <file_name>.tar.gz
刷写到 Jetson
- Step 1: 进入之前解压的文件目录,并按如下方式执行刷写命令
cd mfi_reserver-orin-industrial
sudo ./tools/kernel_flash/l4t_initrd_flash.sh --flash-only --massflash 1 --network usb0 --showlogs
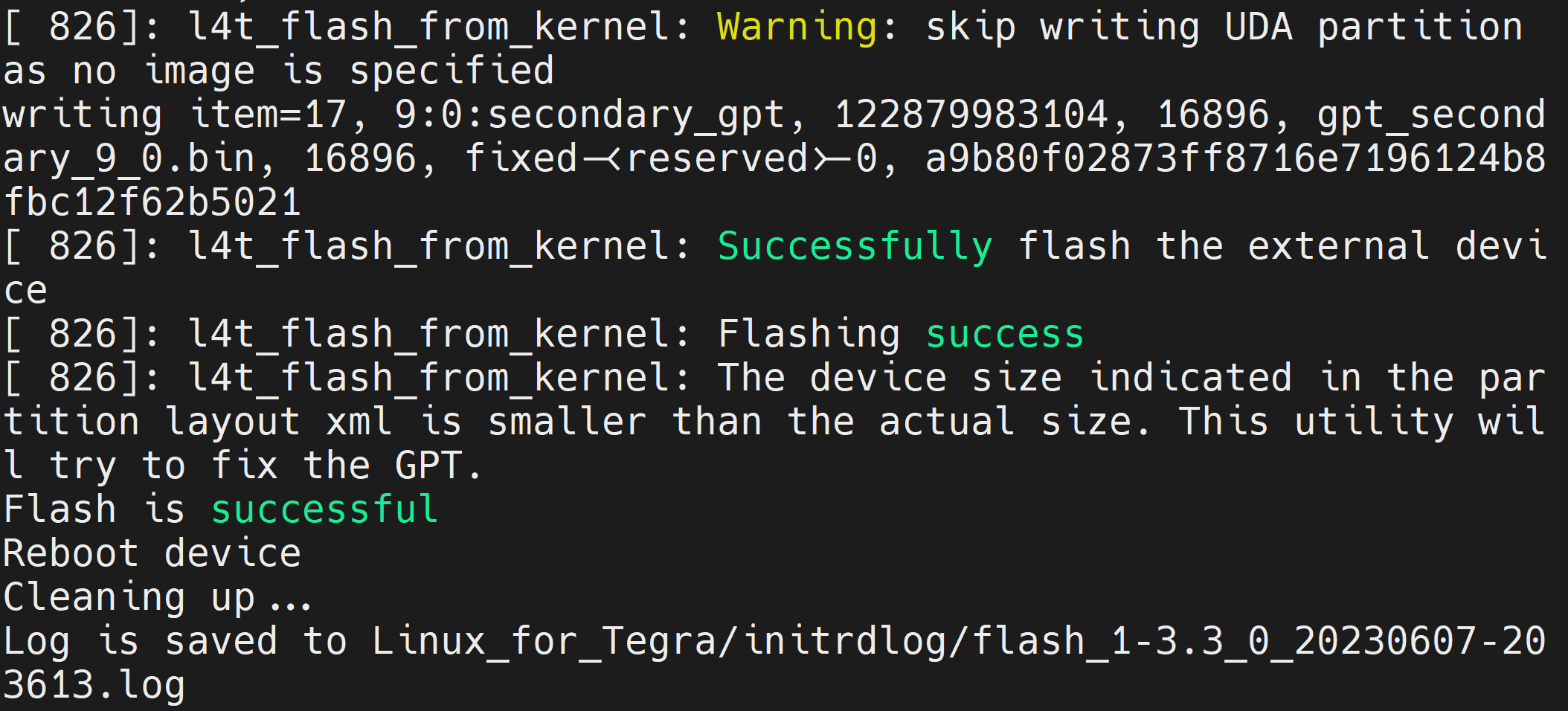
现在将开始把系统镜像刷写到板卡上。如果刷写成功,你会看到如下输出
- Step 2: 使用板载的 HDMI 接口将板卡连接到显示器,并完成初始配置设置
之后,板卡会重启并准备就绪,可以开始使用!
下载并准备 NVIDIA L4T 和 rootfs
wget https://developer.nvidia.com/downloads/embedded/l4t/r35_release_v3.1/release/jetson_linux_r35.3.1_aarch64.tbz2
wget https://developer.nvidia.com/downloads/embedded/l4t/r35_release_v3.1/release/tegra_linux_sample-root-filesystem_r35.3.1_aarch64.tbz2
tar xf jetson_linux_r35.3.1_aarch64.tbz2
sudo tar xpf tegra_linux_sample-root-filesystem_r35.3.1_aarch64.tbz2 -C Linux_for_Tegra/rootfs/
cd Linux_for_Tegra/
sudo ./apply_binaries.sh
sudo ./tools/l4t_flash_prerequisites.sh
下载并准备驱动
- Step 1: 将与你所使用板卡对应的驱动文件下载到 Ubuntu 电脑
| Jetson 模组 | 下载链接 | JetPack 版本 | L4T 版本 |
|---|---|---|---|
| Jetson Orin NX 8GB/ 16GB | 下载 | 5.1.1 | 35.3.1 |
| Jetson Orin Nano 8GB | 下载 | ||
| Jetson Orin Nano 4GB | 下载 |
- Step 2: 将下载好的外设驱动移动到与 Linux_For_Tegra 目录相同的文件夹中

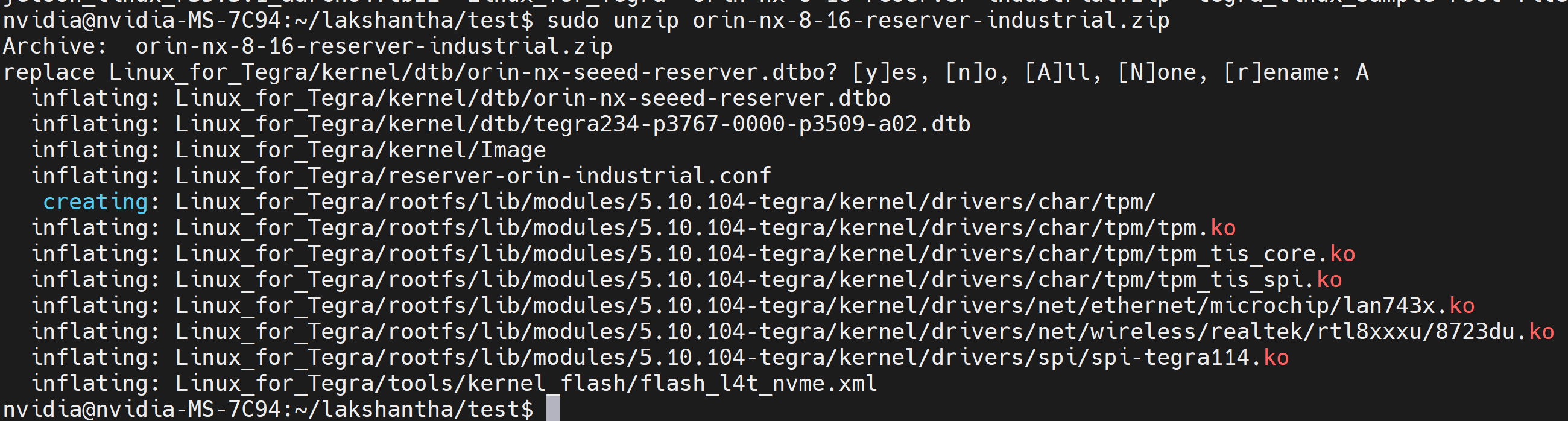
- Step 3: 解压下载的驱动 .zip 文件。这里我们另外安装用于解压 .zip 文件所需的 unzip 软件包
sudo apt install unzip
sudo unzip xxxx.zip # Replace xxxx with the driver file name
此时会询问是否替换文件。输入 A 并按 ENTER 键以替换必要的文件
刷写到 Jetson
- Step 1: 进入 Linux_for_Tegra 目录,并按如下方式执行刷写命令
cd Linux_for_Tegra
sudo ./tools/kernel_flash/l4t_initrd_flash.sh --external-device nvme0n1p1 -c tools/kernel_flash/flash_l4t_nvme.xml -S 80GiB -p "-c bootloader/t186ref/cfg/flash_t234_qspi.xml --no-systemimg" --network usb0 reserver-orin-industrial external
现在将开始把系统镜像刷写到板卡上。如果刷写成功,你会看到如下输出
- Step 2: 使用板载的 HDMI 接口将板卡连接到显示器,并完成初始配置设置
之后,板卡会重启,你将看到如下界面
- Step 3: 在设备中打开终端窗口,执行以下命令,设备会重启并准备就绪,可以开始使用!
systemctl disable nvgetty.service
sudo depmod -a
sudo reboot
此外,如果你想安装 CUDA、cuDNN、TensorRT 等 SDK 组件,请执行以下命令
sudo apt update
sudo apt install nvidia-jetpack -y
硬件与接口使用
若要进一步了解如何使用 reServer Industrial 板上的所有硬件和接口,请参考此 wiki:
资源
(更改这些链接)
技术支持
如果你有任何问题,欢迎在我们的 forum 中提交 issue。
