reTerminal DM CAN BUS with Node-RED
CAN BUS 简介

CAN BUS & Node-RED
CAN 总线(控制器局域网总线)是一种用于连接车辆或工业系统中多个电子控制单元(ECU)的网络类型。它最初由博世公司在 1980 年代开发,现已成为车辆和其他应用中串行通信的国际标准(ISO 11898)。
CAN 总线能够在 ECU 之间实现高速数据交换,允许它们共享信息并协调活动。它使用双线系统,一根线用于传输数据,另一根线用于接收数据,并且支持多个节点,使其非常适合用于需要多个设备相互通信的复杂系统。
CAN 总线技术在汽车行业中广泛应用于各种应用,包括发动机控制、变速器控制、ABS(防抱死制动系统)、安全气囊控制等等。它还用于其他行业,如工业自动化、医疗设备和航空航天,在这些领域中,设备之间可靠高效的通信至关重要。
CAN 总线具有许多优势,包括高可靠性、低成本以及在恶劣环境中运行的能力。它易于安装和维护,并且对电磁干扰具有很强的抗性。这些特性使其成为许多需要可靠高效通信的不同应用的理想选择。
在 reTerminal DM 上开始使用 CAN BUS 节点
要将 Node-RED 与 CAN 总线一起使用,您需要一个连接到 reTerminal DM CAN BUS 端口的 CAN 总线接口设备,以及一个允许您在网络上发送和接收消息的 Node-RED CAN 总线节点,在本例中我们将一起探索 node-red-contrib-socketcan 节点。一旦您在 Node-RED 中安装了 CAN 总线节点,您就可以开始构建从 CAN 总线网络读取数据、处理数据并将其发送到其他系统或设备的流程。例如,您可以从车辆的 CAN 总线读取发动机转速,处理数据以计算燃油消耗,并将结果发送到仪表板进行显示。
您可以在 node-red-contrib-socketcan 页面找到更多信息。
如果您使用的是 Senscraft Edge OS,可以跳过 Socketcan 节点安装步骤。
前提条件
硬件
- 1 x reTerminal DM
- 1 x 主机
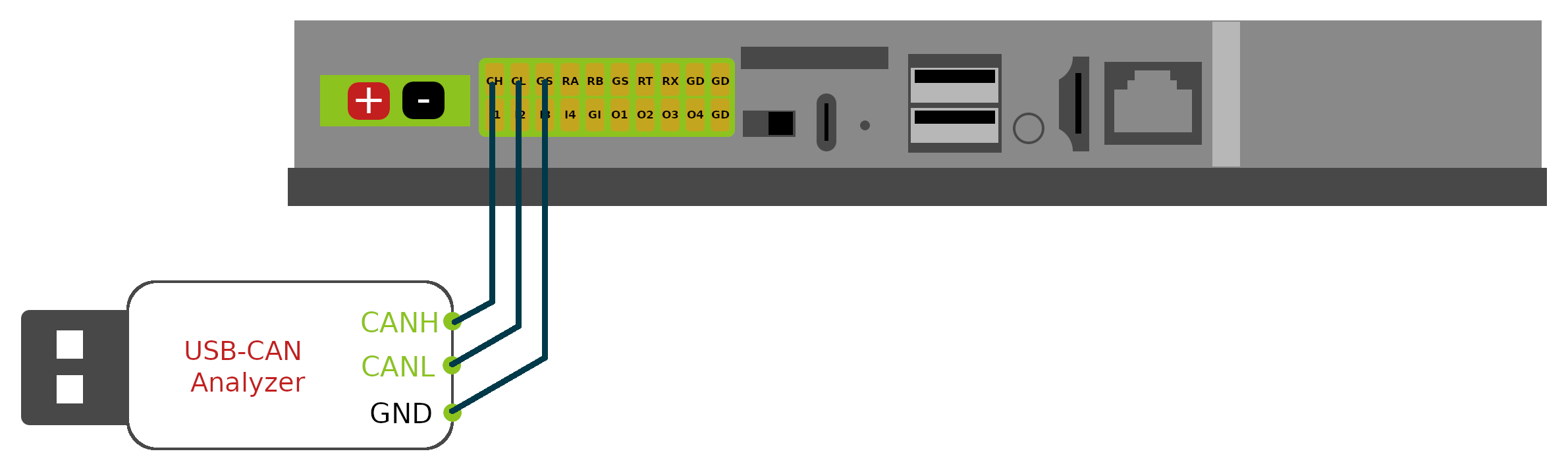
- 1 x USB-CAN 分析仪
硬件准备
请按如下所示连接硬件
软件
主机应该能够通过互联网连接到 reTerminal DM 以执行以下设置步骤。
安装 Socketcan 节点
在本 Wiki 教程中,我们将使用 node-red-contrib-socketcan 节点,因此请按照指南安装节点安装 node-red-contrib-socketcan。
在 reTerminal DM 上配置 CAN BUS
假设您可以直接访问 reTerminal DM 上的 Terminal 应用程序或通过 SSH 访问 reTerminal DM,如果没有,请按照这里的第一步来熟悉如何操作。
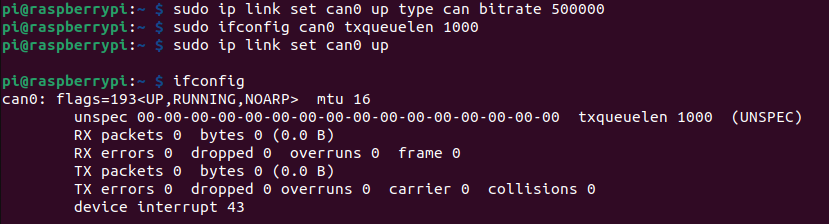
请逐一输入以下命令,以启用名为 can0 的虚拟 can 设备,该设备连接到 reTerminal DM 上的 CAN BUS 端口。
sudo apt install can-utils
sudo ip link set can0 up type can bitrate 250000
sudo ifconfig can0 txqueuelen 1000
sudo ip link set can0 up
输入上述命令后,您应该能够通过 ifconfig 命令看到 can0 设备,如下所示:
配置主机 USB-CAN 软件和驱动程序
如果您使用的是相同的 USB-CAN 分析仪,您可以按照以下步骤设置软件驱动程序来使用该分析仪。
请访问 USB-CAN 分析仪 驱动程序 GitHub 仓库 USB-CAN 分析仪系统驱动程序,并按照 Readme 部分根据您的操作系统安装驱动程序。
发送和接收 CAN 总线流量的示例命令
# dump CAN bus traffic from CAN bus
$ ./canusb -t -d /dev/ttyUSB0 -s 250000 -t
# send the bytes 0x00112233 from ID 005 on at CAN bus
$ ./canusb -d /dev/ttyUSB0 -s 250000 -t -i 5 -j 00112233
使用 reTerminal DM 的 Socketcan 节点
导入流程
以下步骤仅用于教程目的,在本节中我们将向您展示如何通过复制 JSON 格式的流程并粘贴到导入节点弹出菜单的输入框中来快速导入流程。
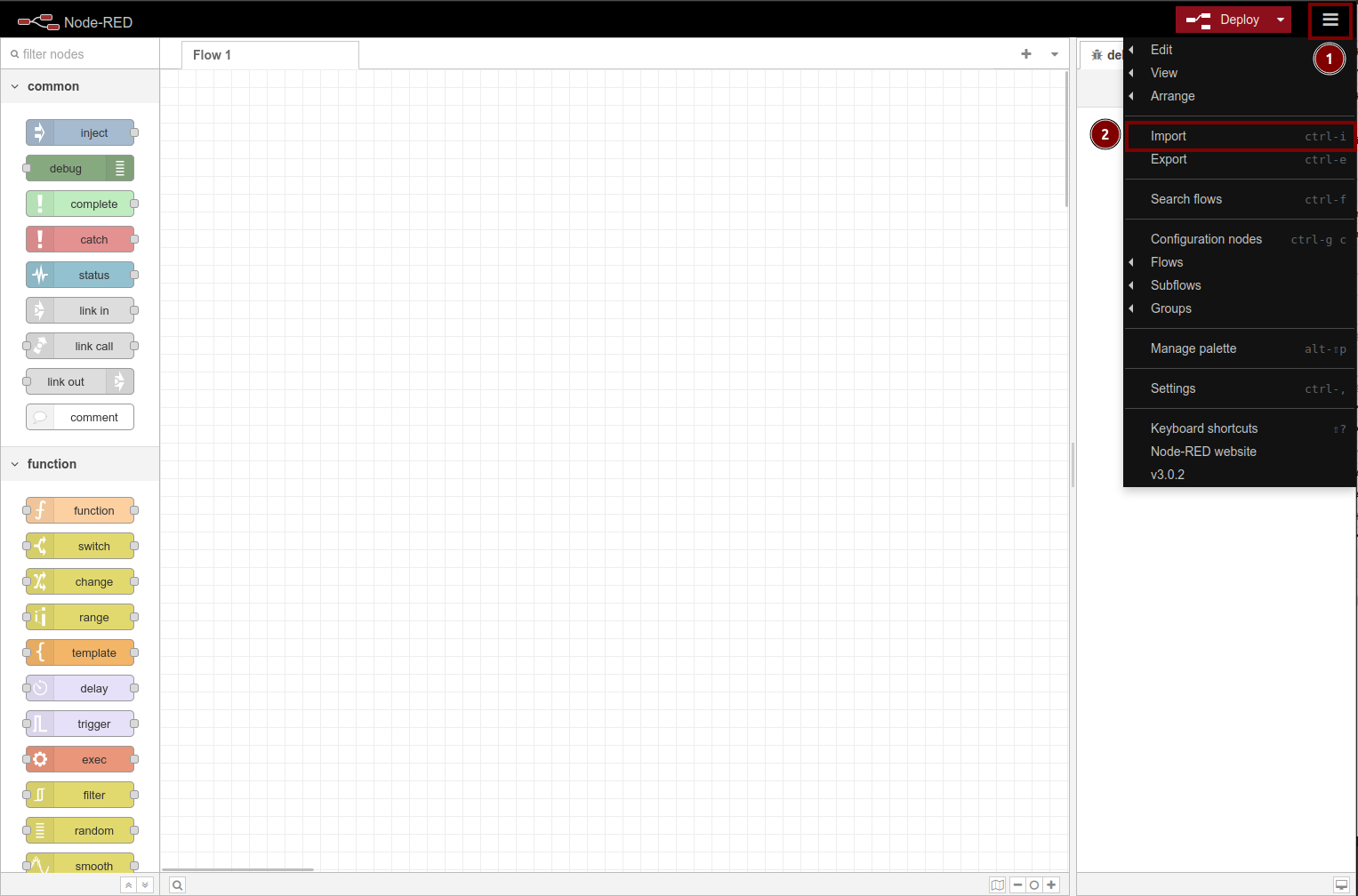
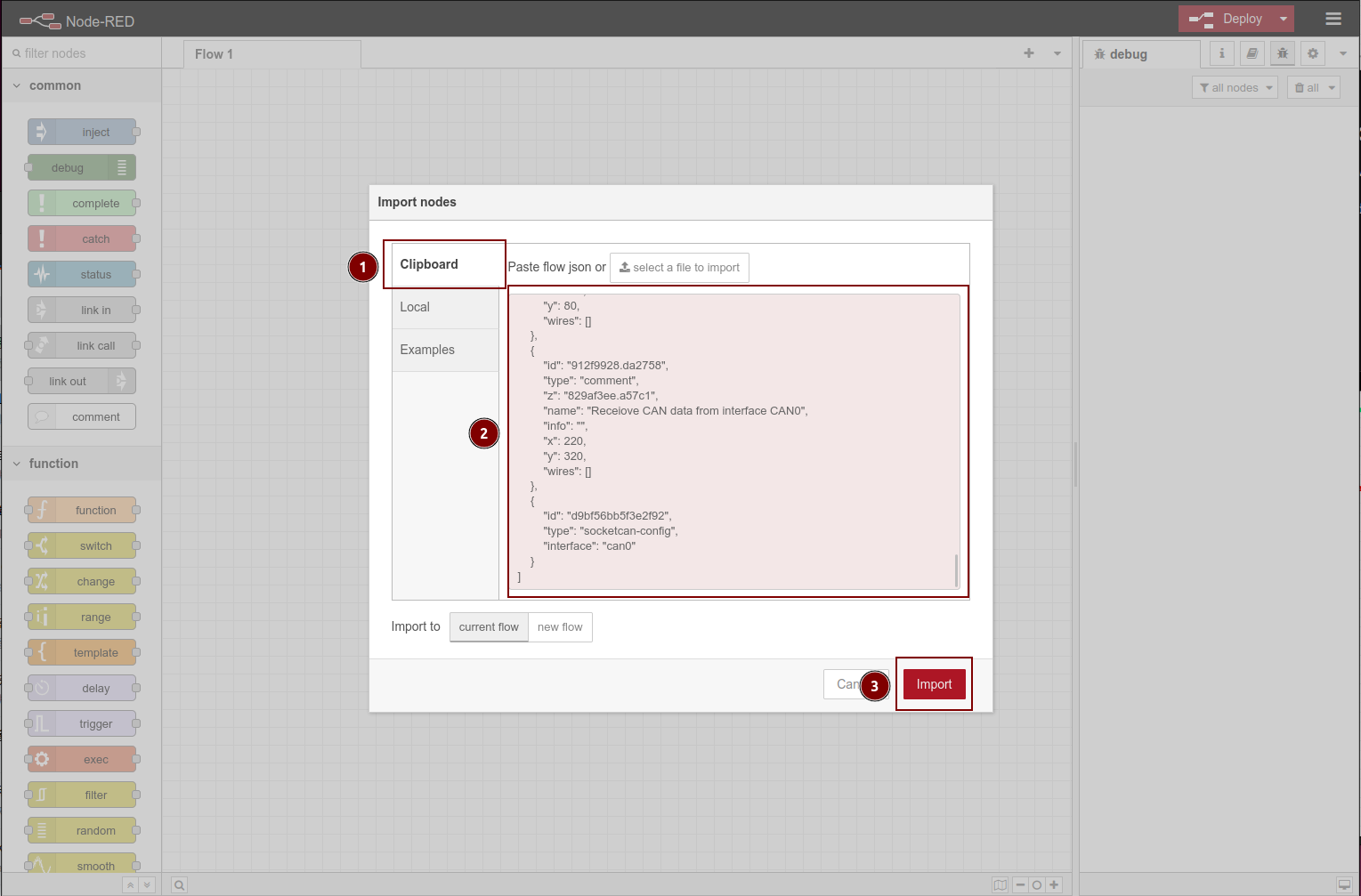
步骤 1:点击设置按钮然后点击导入按钮打开导入节点窗口
步骤 2:复制以下流程 JSON
[
{
"id": "829af3ee.a57c1",
"type": "tab",
"label": "CAN BUS",
"disabled": false,
"info": ""
},
{
"id": "7b24a62e.8f5458",
"type": "debug",
"z": "829af3ee.a57c1",
"name": "",
"active": true,
"tosidebar": true,
"console": false,
"tostatus": false,
"complete": "false",
"x": 350,
"y": 360,
"wires": []
},
{
"id": "5f671b29.cd24bc",
"type": "socketcan-out",
"z": "829af3ee.a57c1",
"name": "socketcan-out",
"config": "d9bf56bb5f3e2f92",
"x": 150,
"y": 360,
"wires": [
[
"7b24a62e.8f5458"
]
]
},
{
"id": "caba412f.047b2",
"type": "socketcan-in",
"z": "829af3ee.a57c1",
"name": "socketcan-in",
"config": "d9bf56bb5f3e2f92",
"x": 350,
"y": 120,
"wires": []
},
{
"id": "a64240cb.3f0788",
"type": "inject",
"z": "829af3ee.a57c1",
"name": "Send object - std",
"props": [
{
"p": "payload"
},
{
"p": "topic",
"vt": "str"
}
],
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": 0.1,
"topic": "",
"payload": "{\"ext\":false,\"canid\":123,\"dlc\":5,\"data\":[1,2,3,4,5]}",
"payloadType": "json",
"x": 160,
"y": 120,
"wires": [
[
"caba412f.047b2"
]
]
},
{
"id": "3ff96369.ef6f5c",
"type": "inject",
"z": "829af3ee.a57c1",
"name": "Send string - std",
"props": [
{
"p": "payload"
},
{
"p": "topic",
"vt": "str"
}
],
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": 0.1,
"topic": "",
"payload": "123#00112233",
"payloadType": "str",
"x": 160,
"y": 200,
"wires": [
[
"caba412f.047b2"
]
]
},
{
"id": "6879c00a.5edb68",
"type": "inject",
"z": "829af3ee.a57c1",
"name": "Send string - ext",
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": 0.1,
"topic": "",
"payload": "1F334455#1122334455667788",
"payloadType": "str",
"x": 160,
"y": 240,
"wires": [
[
"caba412f.047b2"
]
]
},
{
"id": "1ee3b274.4cb8fe",
"type": "inject",
"z": "829af3ee.a57c1",
"name": "Send object - ext",
"props": [
{
"p": "payload"
},
{
"p": "topic",
"vt": "str"
}
],
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": 0.1,
"topic": "",
"payload": "{\"ext\":true,\"canid\":32278,\"dlc\":5,\"data\":[1,2,3,4,5]}",
"payloadType": "json",
"x": 160,
"y": 160,
"wires": [
[
"caba412f.047b2"
]
]
},
{
"id": "391a4c45.7acd8c",
"type": "comment",
"z": "829af3ee.a57c1",
"name": "Send CAN frames in using different payloads on CAN0",
"info": "",
"x": 260,
"y": 80,
"wires": []
},
{
"id": "912f9928.da2758",
"type": "comment",
"z": "829af3ee.a57c1",
"name": "Receiove CAN data from interface CAN0",
"info": "",
"x": 220,
"y": 320,
"wires": []
},
{
"id": "d9bf56bb5f3e2f92",
"type": "socketcan-config",
"interface": "can0"
}
]
步骤 3:在 Import nodes 窗口中,请选择 Clipboard 选项卡,然后将上述 json 流代码粘贴到 红色对话框 中,然后点击 import 按钮。
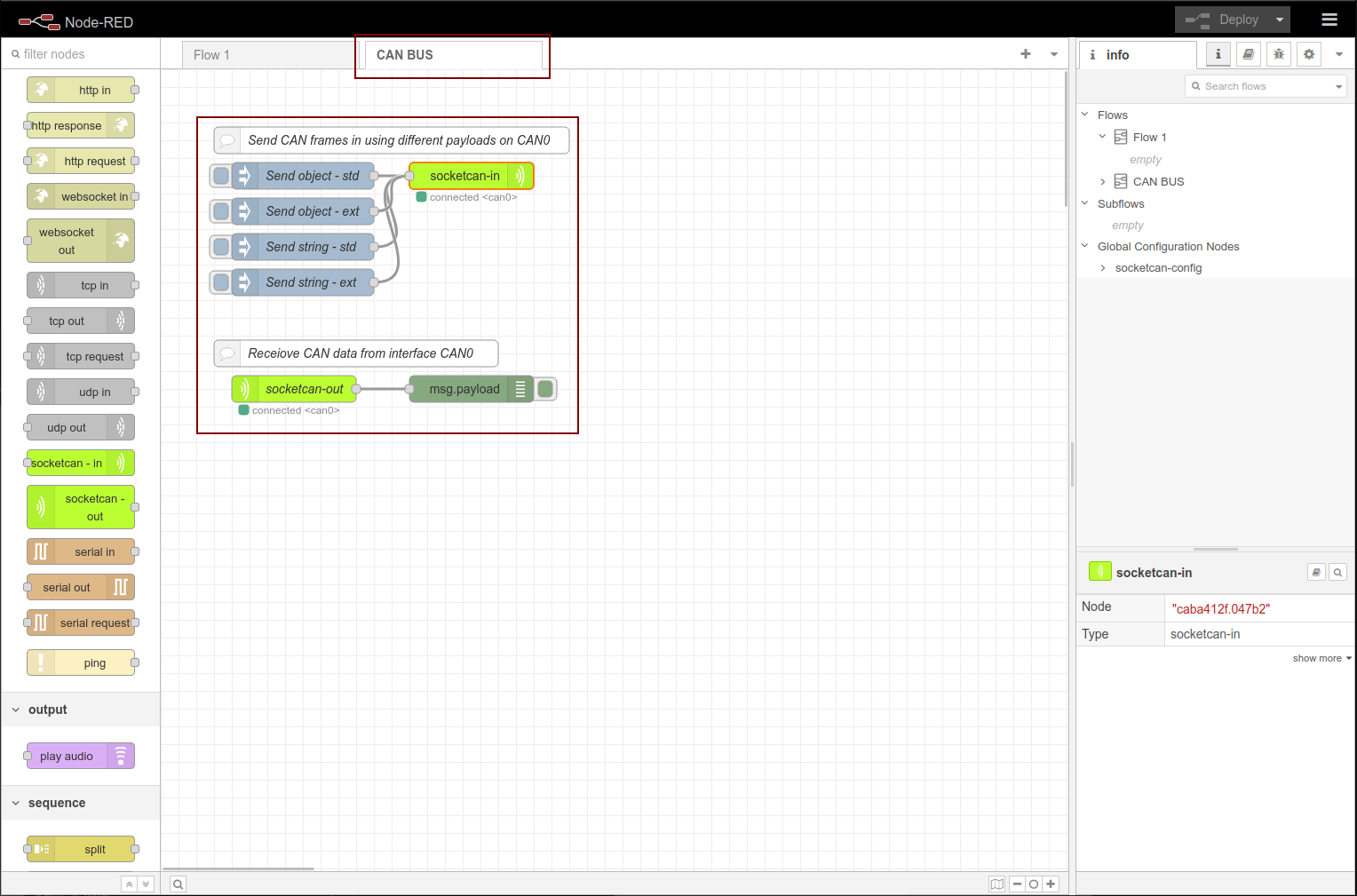
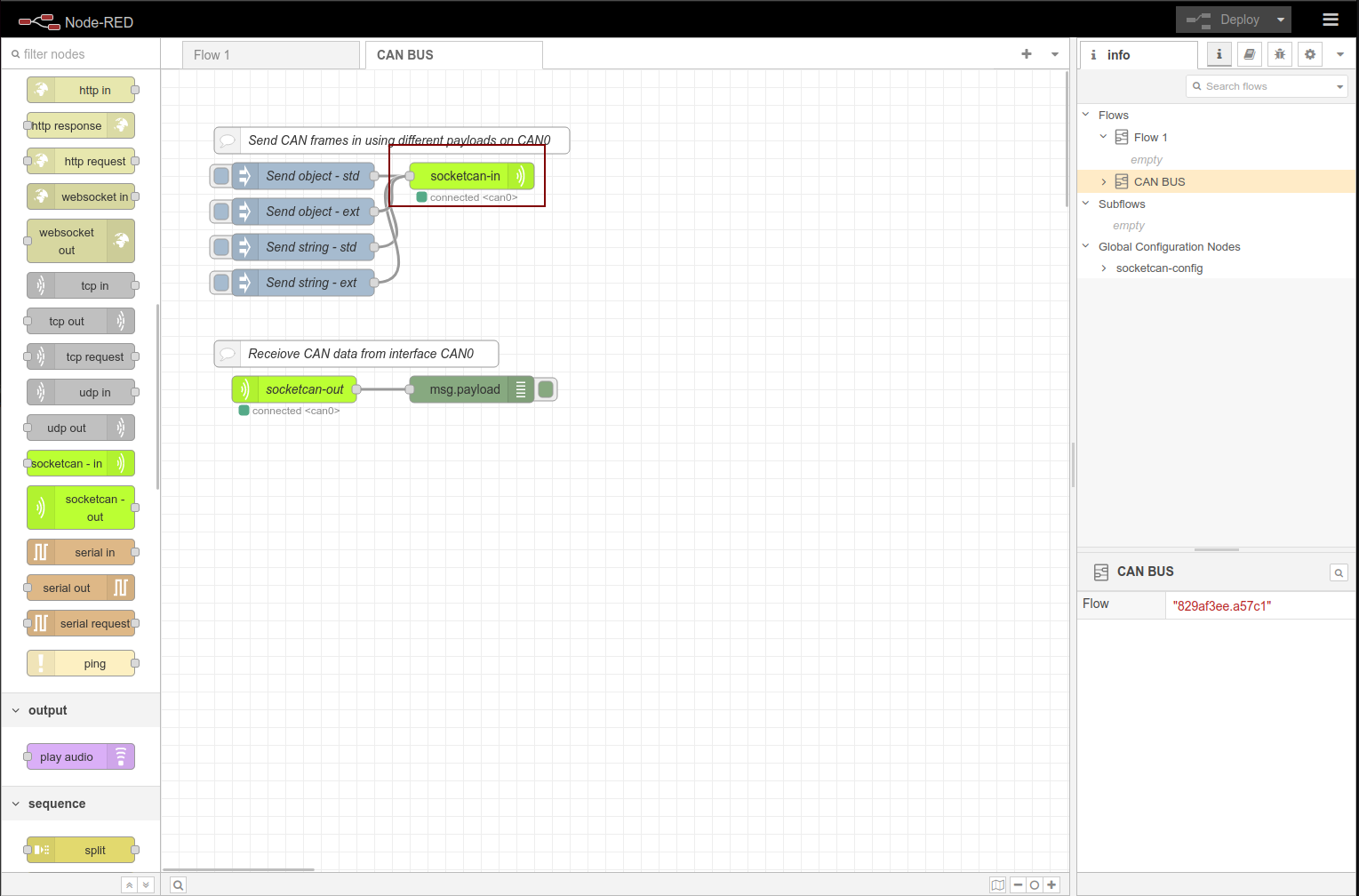
步骤 4:完成上述步骤后,您应该看到创建了一个名为 CAN BUS 的新流选项卡,请检查流是否与下图所示相同
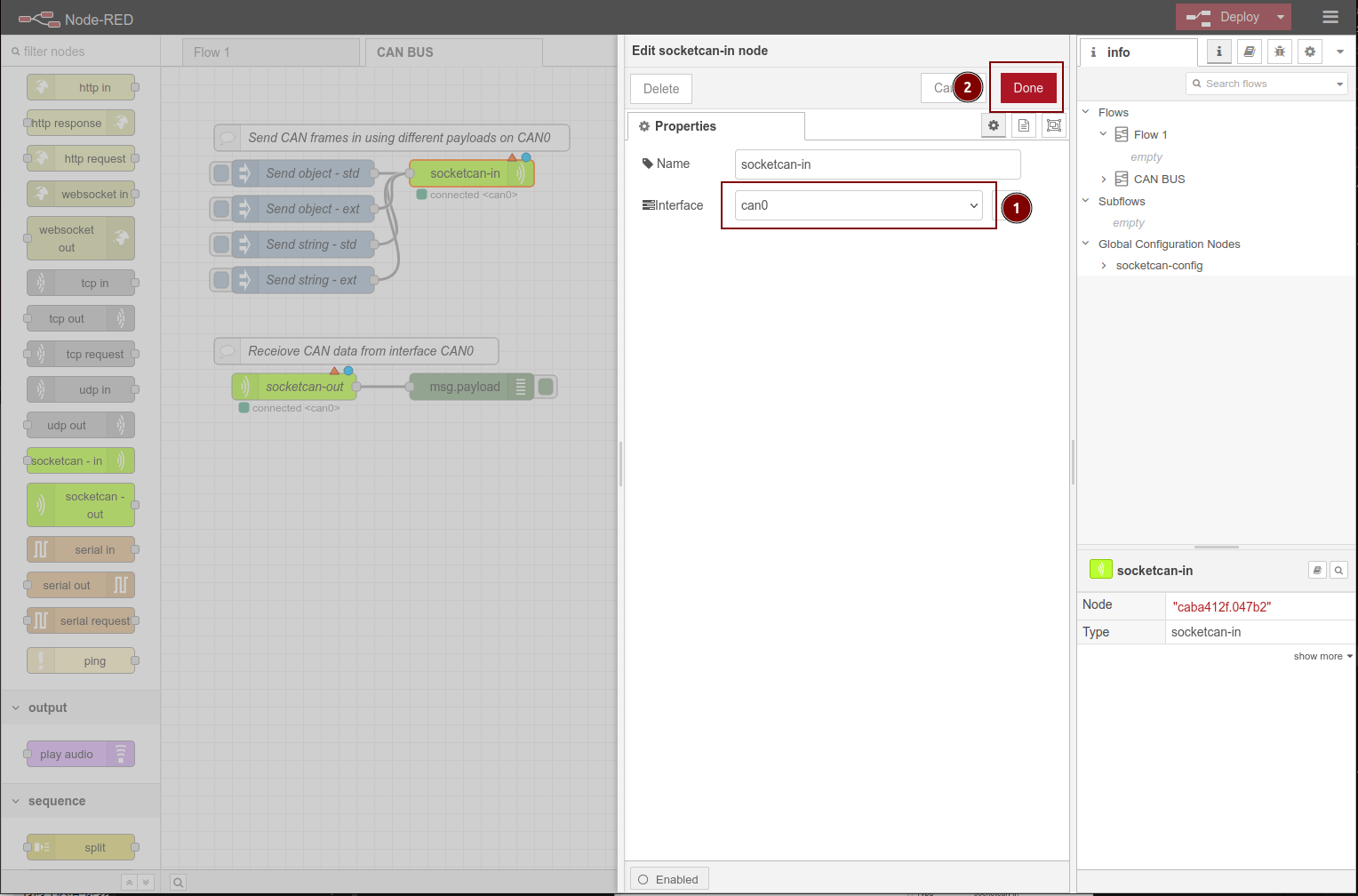
步骤 5:要设置 can 接口,您需要双击 socketcan-in node 以打开 edit node 窗口。
确保您已完成 在 reTerminal DM 上配置 CAN BUS 部分 中的步骤,在 reTerminal DM 上创建 can0 接口设备
步骤 6:在 Edit socketcan-in node 窗口中,点击 interface 选项处的 铅笔 图标以打开 Add new socketcan-config config node 窗口
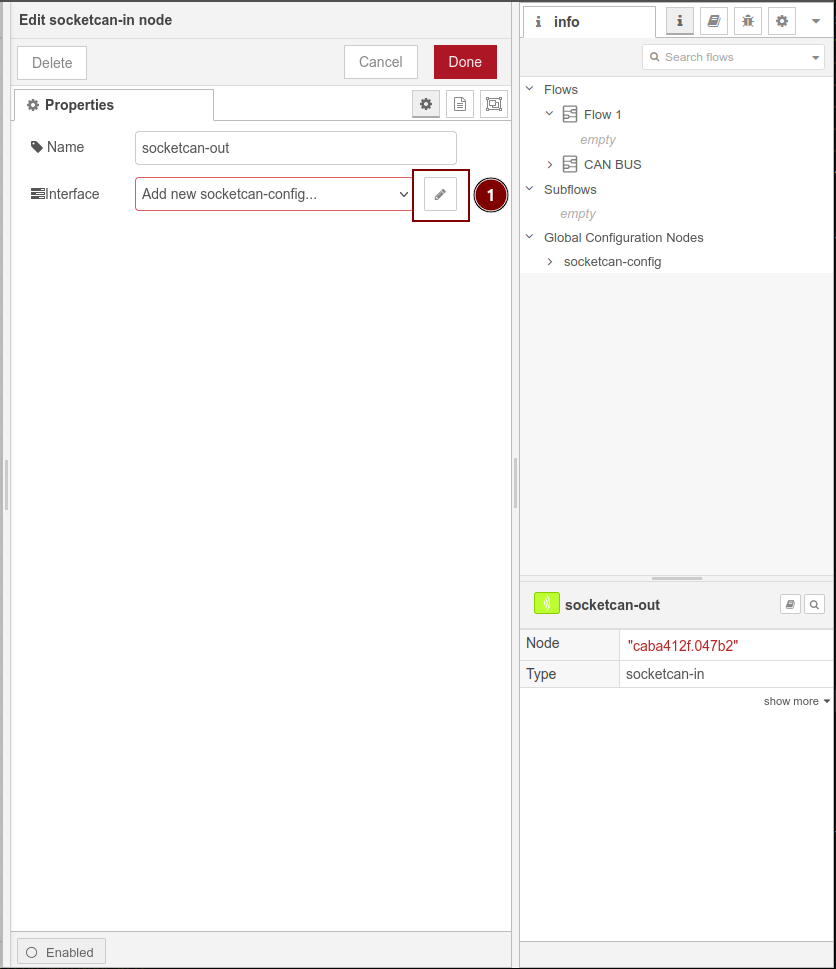
步骤 7:在 Add new socketcan-config config node 窗口中,请在接口对话框中输入 can0
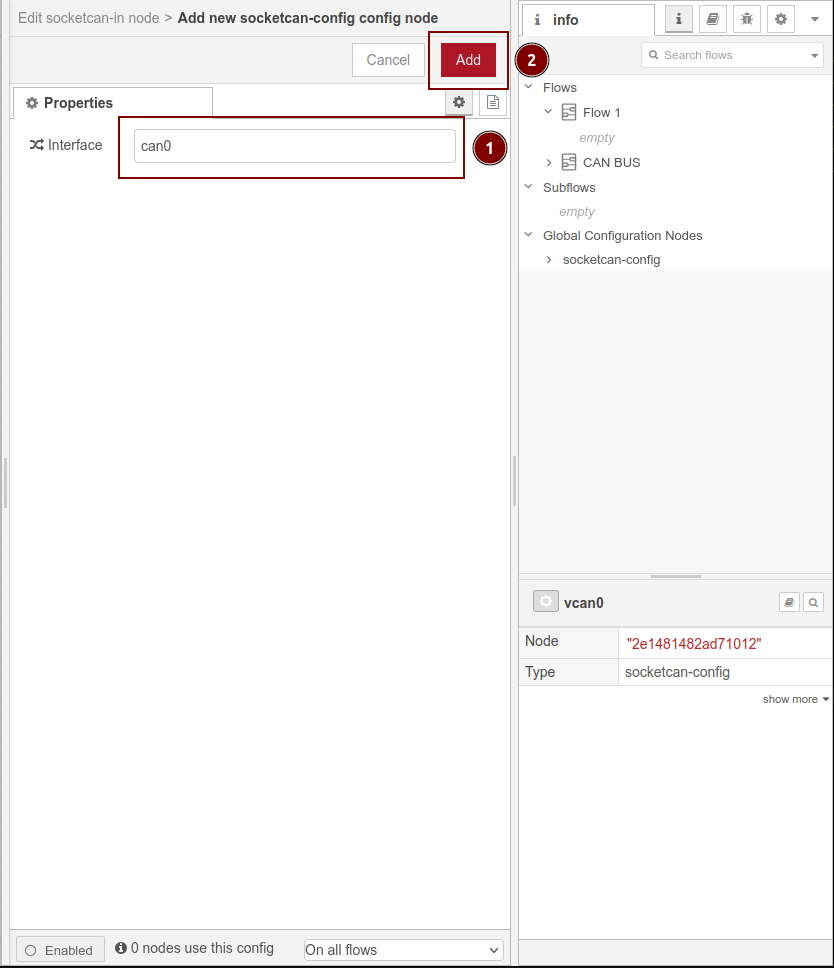
步骤 8:从上述步骤中点击 Add 按钮后,您应该看到 interface 设置为 can0,然后点击 Done 应用。
步骤 9:为 socketcan-out 设置 CAN Bus 接口,只需双击 scoketcan-out 节点并为 Config 选择 can0,然后点击 Done
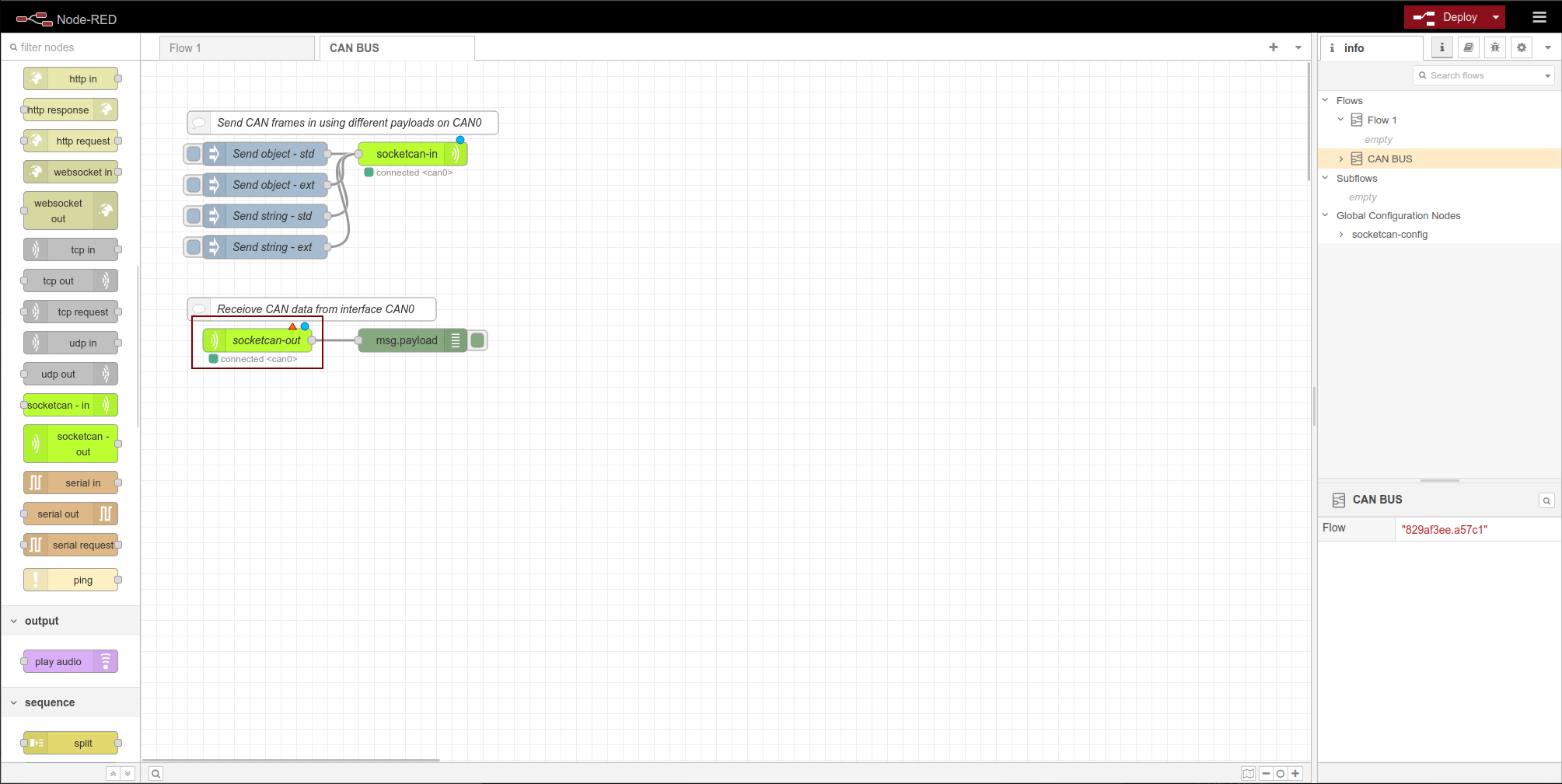
步骤 10:现在请点击 Deploy
最终测试和结果
恭喜,您已成功体验并学会了如何在 reTerminal DM 和 node-RED 中使用 CAN Bus 协议,您的最终结果应该与下图所示类似
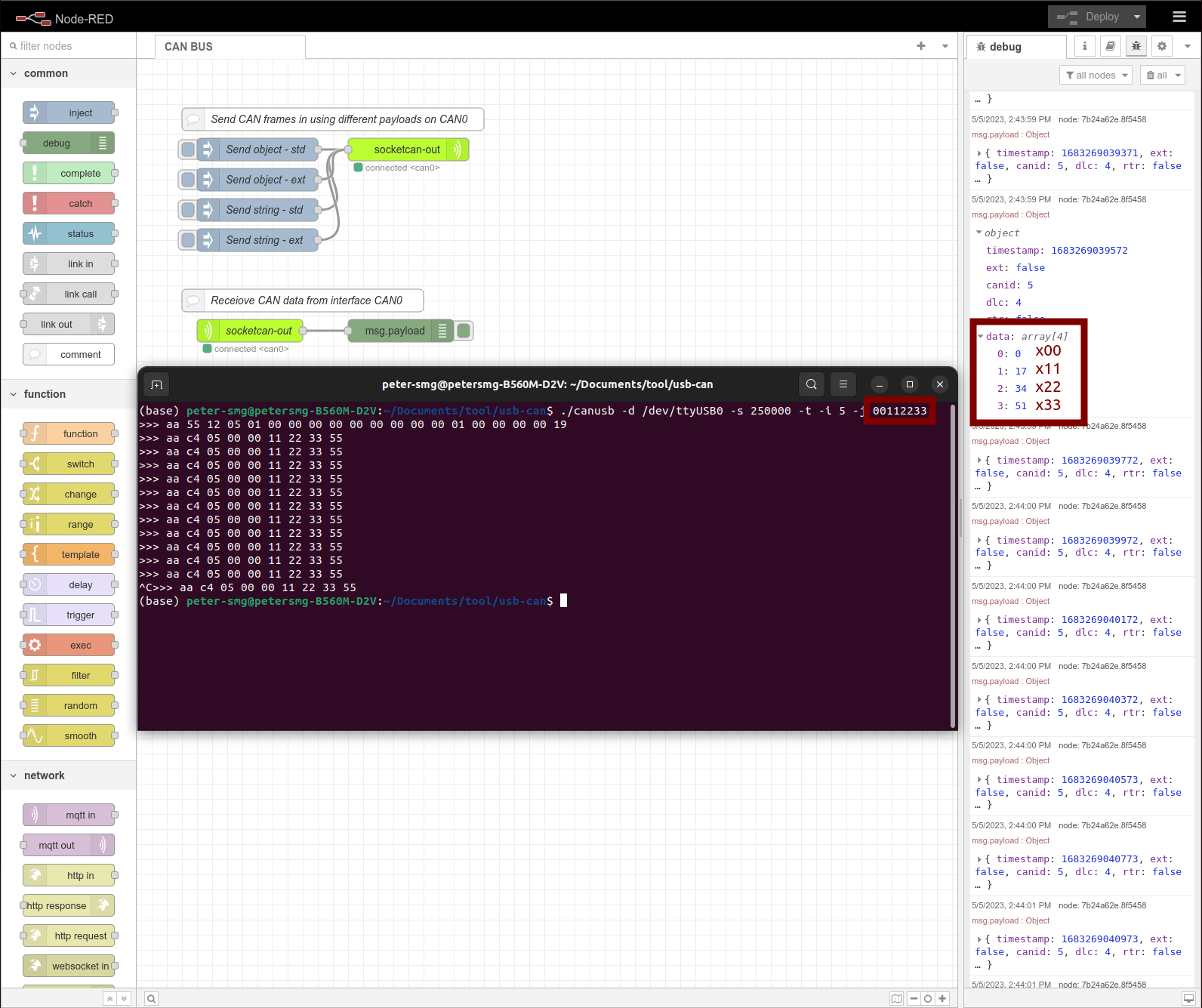
对于主机发送 CAN Bus 数据和 reTerminal DM 接收:
- 因此,从主机终端窗口您可以执行
./canusb -d /dev/ttyUSB0 -s 250000 -t -i 5 -j 00112233命令向 reTerminal DM 发送00112233(十六进制),从 reTerminal DM 调试窗口您可以看到数据是
0: 0
1: 17
2: 34
3: 51
其中是 x00 x11 x22 x33 十六进制数据集的二进制表示。
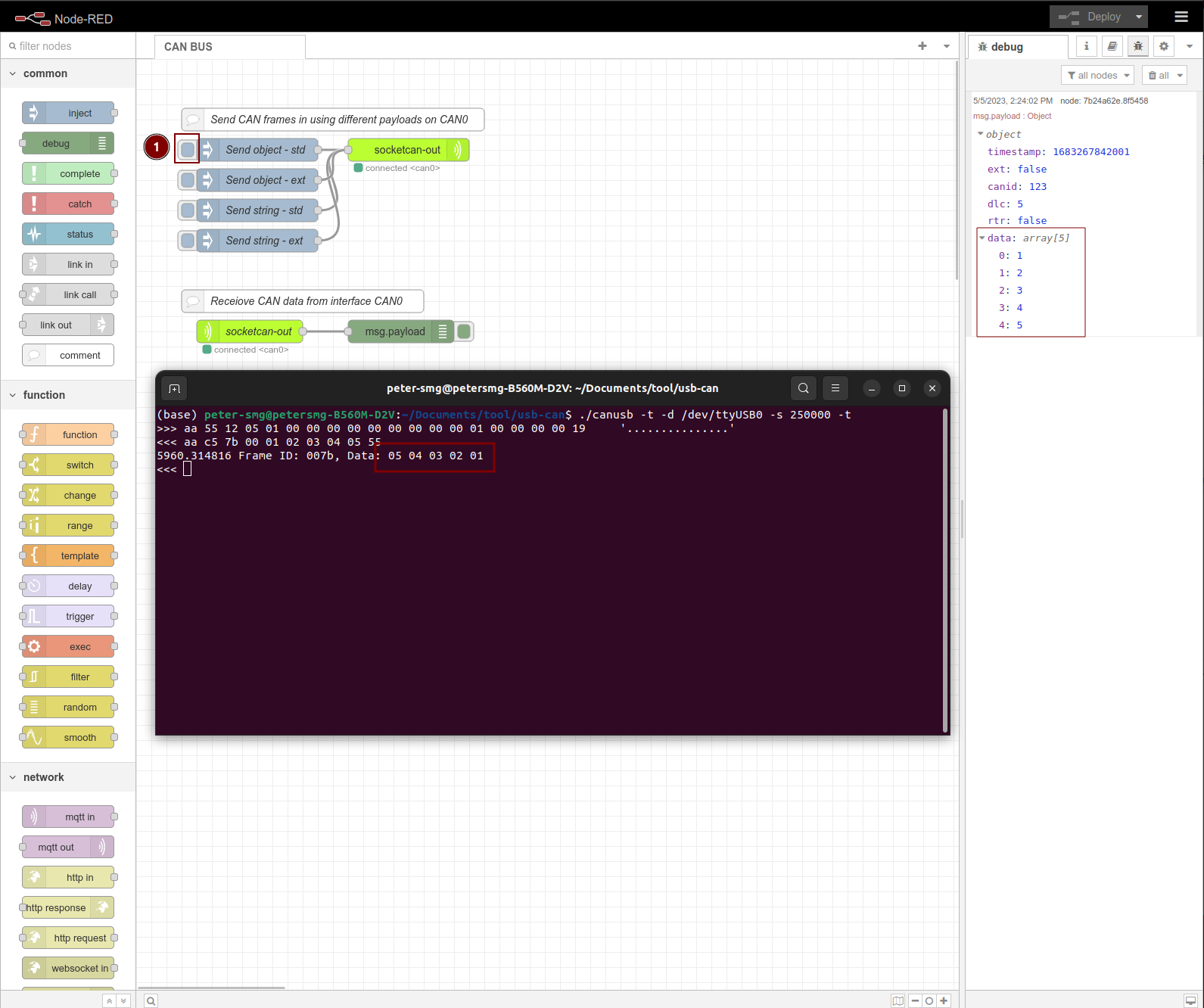
对于主机接收 CAN 总线数据和 reTerminal DM 发送:
- 您需要点击 reTerminal DM Node-Red 中的
inject按钮,如下图所示,向主机发送数据01 02 03 04 05,正如您在主机终端窗口中看到的,接收命令是./canusb -t -d /dev/ttyUSB0 -s 250000 -t,接收到的数据是05 04 03 02 01,因为它是按先进先出的顺序:
在 reTerminal DM 上使用 Node-RED 探索更多节点
技术支持与产品讨论
感谢您选择我们的产品!我们在这里为您提供不同的支持,以确保您使用我们产品的体验尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。