硬件和接口使用
本wiki介绍了reTerminal上各种不同的硬件和接口,以及如何使用它们来扩展您的项目想法。
注意: 对于某些硬件和接口,在运行Raspberry Pi OS镜像、Buildroot镜像和Yocto镜像时,使用说明会有所不同。默认步骤适用于Raspberry Pi OS镜像。但是,如果Buildroot镜像和Yocto镜像的说明不同,会有明确的标注。
硬件概览


40引脚Raspberry Pi兼容引脚

40引脚包含26个GPIO、最多5个I2C、最多5个SPI、最多5个UART、1个PCM、1个PWM、1个SDIO接口、1个DPI(并行RGB显示)、最多3个GPCLK输出和1个USB接口。
USB接口是从Compute Module 4内部的USB 2.0接口扩展而来。因此您可以使用此接口扩展到更多USB连接器,并获得高达480 Mbit/s的速度。
您还可以使用这40个引脚连接到Raspberry Pi兼容的Hat并扩展您的项目!
点击这里探索Seeed Studio提供的各种Raspberry Pi Hat,点击这里查看更多第三方Raspberry Pi Hat!
GPIO引脚可以安全地提供最大50mA的电流。这意味着50mA分布在所有引脚上。因此,单个GPIO引脚只能安全地提供16mA电流。另一方面,其余每个引脚的最大电流消耗为2A。在将额外硬件连接到这些引脚时,请记住这一点。
原理图
提示: 点击这里查看高分辨率图像
使用方法 - GPIO
- 步骤1. 将引脚设置为GPIO
sudo -i #enable root account privileges
cd /sys/class/gpio
echo 23 > export #GPIO23 which is Pin 16
cd gpio23
- 步骤 2. 设置 GPIO 输入/输出
echo in > direction #set GPIO as input
echo out > direction #set GPIO as output
- 步骤 3. 设置 GPIO 高/低电平
echo 1 > value #set GPIO to high
echo 0 > value #set GPIO to low
- 步骤 4. 获取GPIO输入/输出状态
cat direction
- 步骤 5. 获取GPIO级别状态
cat value
- 步骤 6. 将引脚设置回默认状态
cd ..
echo 23 > unexport
在 Buildroot 镜像上的使用
- 用 su - 替换 sudo -i 来启用 root 账户权限
- 按照上述提到的其他步骤操作
在 Yocto 镜像上的使用
- 不需要 sudo -i,因为我们已经以 root 身份登录
- 按照上述提到的其他步骤操作
使用方法 - I2C
-
步骤 1. 打开 reTerminal,点击 Raspberry Pi 桌面 UI 上的 Raspberry Pi 图标,导航到
Preferences > Raspberry Pi Configuration -
步骤 2. 点击
Interfaces选项卡,然后点击 I2C 旁边的 Enabled

-
步骤 3. 点击 OK
-
步骤 4. 将 I2C 设备连接到 reTerminal
-
步骤 5. 列出所有可用的 I2C 总线
i2cdetect -l

- 步骤 6. 扫描 I2C 总线 1 (i2c-1) 上的标准地址
i2cdetect -y 1
注意 1 代表 I2C 总线编号

上图显示检测到的 I2C 设备地址为 0x20、0x51、0x45、0x19、0x29 和 0x5c
在 Buildroot 镜像上的使用
- 您无需为 Buildroot 镜像开启 I2C,因为 I2C 默认已启用
- 按照上述提到的其他步骤操作
在 Yocto 镜像上的使用
- 开启时 I2C 未启用。它仅在每次启动后使用 modprobe i2c-dev 才能工作。一旦修复此问题,将会更新。
使用方法 - SPI
-
步骤 1. 开启 reTerminal,点击 Raspberry Pi 桌面 UI 上的 Raspberry Pi 图标,导航到
Preferences > Raspberry Pi Configuration -
步骤 2. 点击
Interfaces选项卡,然后点击 SPI 旁边的 Enabled

-
步骤 3. 将 SPI 设备连接到 reTerminal
-
步骤 4. 列出所有可用的 SPI 设备
ls /dev/spi*
您将看到以下输出

- 步骤 5. 打开终端窗口并输入以下命令来下载一个 SPI 测试工具
wget https://files.seeedstudio.com/wiki/102110497/spidev_test
- 步骤 6. 更改工具的用户权限
chmod +x spidev_test
- 步骤 7. 使用跳线将 GPIO 10 (引脚 19) 和 GPIO 9 (引脚 21) 短接
注意: 这里我们短接 MOSI 和 MISO 引脚
- 步骤 8. 运行以下 SPI 测试工具
./spidev_test -D /dev/spidev0.0 -v -p hello
如果您看到以下输出,SPI 正在正常工作

在 Buildroot/ Yocto 镜像上的使用
- 要启用 SPI,通过 vi /boot/config.txt 命令打开 config.txt
- 在末尾添加 dtparam=spi=on(按 i 进入编辑模式)
- 按 ESC 退出编辑模式
- 通过输入 :wq 保存文件
- 重启
- spidev_test 工具运行时存在问题。一旦修复将会更新。
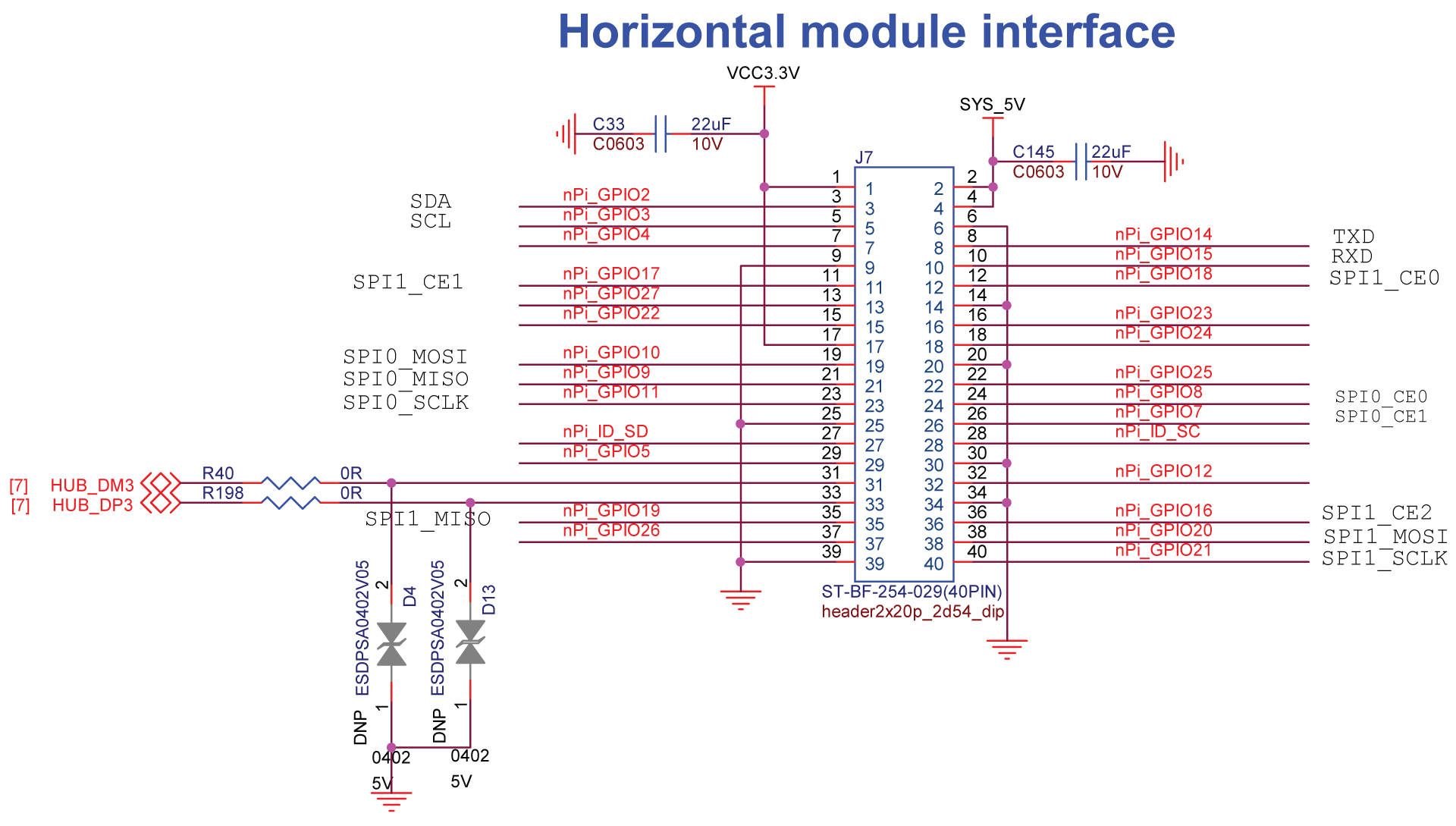
扩展模块的高速接口
reTerminal 背面有一个高速扩展接口。它包含 1 个 PCIe 1-lane Host Gen 2(支持高达 5Gbps 的速度)、1 个 USB 2.0、1 个 PoE 和 26 个 GPIO。这 26 个 GPIO 引脚可以进一步用作 2 个 I2C、2 个 SPI 和 1 个 UART。

提示: 点击这里查看更高分辨率的图像
PCIe、USB 3.0、2 x CAN-FD 和 SDIO3.0 接口是为未来产品定义的,因此目前无法使用
我们计划在未来为 reTerminal 构建扩展模块,我们已经预留了这个接口来将这些模块连接到 reTerminal。我们将发布各种模块,例如:
- 麦克风阵列和扬声器模块
- 摄像头模块
- 工业 I/O
- LoraWAN 模块
- 5G/4G 模块
- PoE 模块
- 以太网交换机

reTerminal 侧面有 2 个 M4 机械螺丝孔,有助于固定扩展模块。
CSI 摄像头接口
reTerminal 有一个 2-lane MIPI CSI 摄像头接口,这意味着您可以将多达 2 个摄像头连接到 reTerminal。一个接口有 15 个引脚,而另一个接口有 22 个引脚。因此,请确保使用与您打算使用的接口相对应的正确排线。这些摄像头接口可用于物体检测和机器学习应用。
原理图

提示: 点击这里查看更高分辨率的图像
使用方法
- 步骤 1. 将摄像头连接到 15 引脚或 22 引脚 FPC 接口

-
步骤 2. 打开 reTerminal,在 Raspberry Pi 桌面 UI 上点击 Raspberry Pi 图标,导航到
Preferences > Raspberry Pi Configuration -
步骤 3. 点击
Interfaces选项卡,点击 Camera 旁边的 Enabled

- 步骤 4. 点击 Yes 重启

- 步骤 5. 打开终端窗口,输入以下命令拍摄静态照片并保存到桌面
raspistill -o Desktop/image.jpg
注意: 您可以根据自己的偏好更改保存位置
-
步骤 6. 双击桌面上生成的文件来查看图像
-
步骤 7. 输入以下命令来录制视频并将其保存到桌面
raspivid -o Desktop/video.h264
- 步骤 8. 双击桌面上生成的文件来播放录制的视频
您可以通过访问官方树莓派文档了解更多关于摄像头使用的信息
在 Buildroot/ Yocto 镜像上的使用
- CSI 摄像头接口尚未测试。一旦测试完成,此部分将会更新。
5英寸LCD
reTerminal 内置的5英寸LCD通过载板内部的 30针DSI接口 连接。此LCD支持 5点多点触控,为了启用此功能,LCD连接到载板上的另一个 TP接口。
原理图

提示: 点击这里查看更高分辨率的图像
LCD触摸面板
使用方法
LCD的触摸面板通过 6针FPC 连接器连接。您可以使用evtest工具来测试它
- 步骤 1. 输入以下命令安装 evtest,这是一个输入设备事件监控和查询工具
sudo apt install evtest
- 步骤 2. 打开evtest工具
evtest

- 步骤 3. 输入 1,您将看到以下输出

- 步骤 4. 在 reTerminal LCD 上随意触摸,您将看到以下输出

在 Buildroot 镜像上的使用
- 您无需安装 evtest 工具,因为它已经安装好了
- 在运行 evtest 之前,您需要通过输入 su - 切换到 root 用户
- 按照上述其他步骤操作
在 Yocto 镜像上的使用
- 您无需安装 evtest 工具,因为它已经安装好了
- 按照上述其他步骤操作
通过 I2C 将其他设备连接到 FPC 连接器
触摸面板通过 I2C 通信协议连接到 reTerminal。因此,如果您愿意,可以轻松地将其他 I2C 设备连接到这个 6 针 FPC 接口。连接图如下

之后按照前面关于如何使用 I2C 的主题中的步骤操作
4 个用户可编程按钮
reTerminal 前面有 4 个用户可编程按钮。这些按钮可以通过软件轻松控制,并且可以根据您的应用程序分配来开启/关闭不同的功能!
原理图

提示: 点击这里查看更高分辨率的图像
使用方法

- 步骤 1. 打开 evtest 工具
evtest

- 步骤 2. 输入 0,您将看到以下输出

- 步骤 3. 从左到右按下按钮,您将看到以下内容

注意: 按钮默认从左到右配置为 a s d f
- 步骤 4. 如果您想要配置按钮,请输入以下内容
sudo nano /boot/config.txt
- 步骤 5. 修改文件,在末尾添加以下内容
dtoverlay=reTerminal,key0=0x100,key1=0x101,key2=0x102,key3=0x103,tp_rotate=1
注意: 这里十六进制数字 100、101、102 和 103 分别分配给 key0、key1、key2、key3
在 Buildroot 镜像上的使用
- 您不需要安装 evtest 工具,因为它已经安装了
- 在运行 evtest 之前,您需要通过输入 su - 切换到 root 用户
- 按照上面提到的其他步骤进行操作
在 Yocto 镜像上的使用
- 您不需要安装 evtest 工具,因为它已经安装了
- 按照上面提到的其他步骤进行操作
3 用户可编程 LED
reTerminal 前面有 2 个用户可编程 LED。这些 LED 可以通过软件开启/关闭,在您想要将它们用作状态 LED 来监控不同硬件功能的场景中非常有用。USR LED 可以点亮绿色,而 STA LED 可以点亮红色或绿色
原理图

提示: 点击这里查看更高分辨率的图像
使用方法

- 步骤 1. 启用 root 账户权限
sudo -i
- 步骤 2. 进入以下目录
cd /sys/class/leds
- 步骤 3. 进入以下目录以控制绿色 USR LED
cd usr_led0
- 步骤 4. 以最大亮度打开LED
echo 255 > brightness
注意: 您可以输入 1 - 255 之间的值来调节亮度级别
- 步骤 5. 关闭 LED
echo 0 > brightness
- 步骤 6. 进入以下目录以控制红色 STA LED
cd ..
cd usr_led1
-
步骤 7. 重复步骤 4 - 5 来控制 LED
-
步骤 8. 进入以下目录来控制绿色 STA LED
cd ..
cd usr_led2
- 步骤 9. 重复步骤 4 - 5 来控制 LED
在 Buildroot 镜像上的使用
- 将 sudo -i 替换为 su - 来启用 root 账户权限
- 按照上述其他步骤进行操作
在 Yocto 镜像上的使用
- 不需要 sudo -i,因为我们已经以 root 身份登录
- 按照上述其他步骤进行操作
千兆以太网端口
reTerminal 板载千兆以太网连接器 (RJ45)。该端口连接到 CM4 模块的千兆以太网 PHY,基于 Broadcom BCM54210PE。它还符合 IEEE 1588-2008 标准。
原理图

提示: 点击这里查看高分辨率图像
加密协处理器
reTerminal 具有安全功能,如Microchip ATECC608A 加密协处理器,具有安全的基于硬件的密钥存储。它还为多达 16 个密钥、证书或数据提供受保护的存储。它为对称签名、验证、密钥协商 – ECDSA 提供硬件支持。它具有对称算法、网络密钥管理和安全启动的硬件支持。
原理图
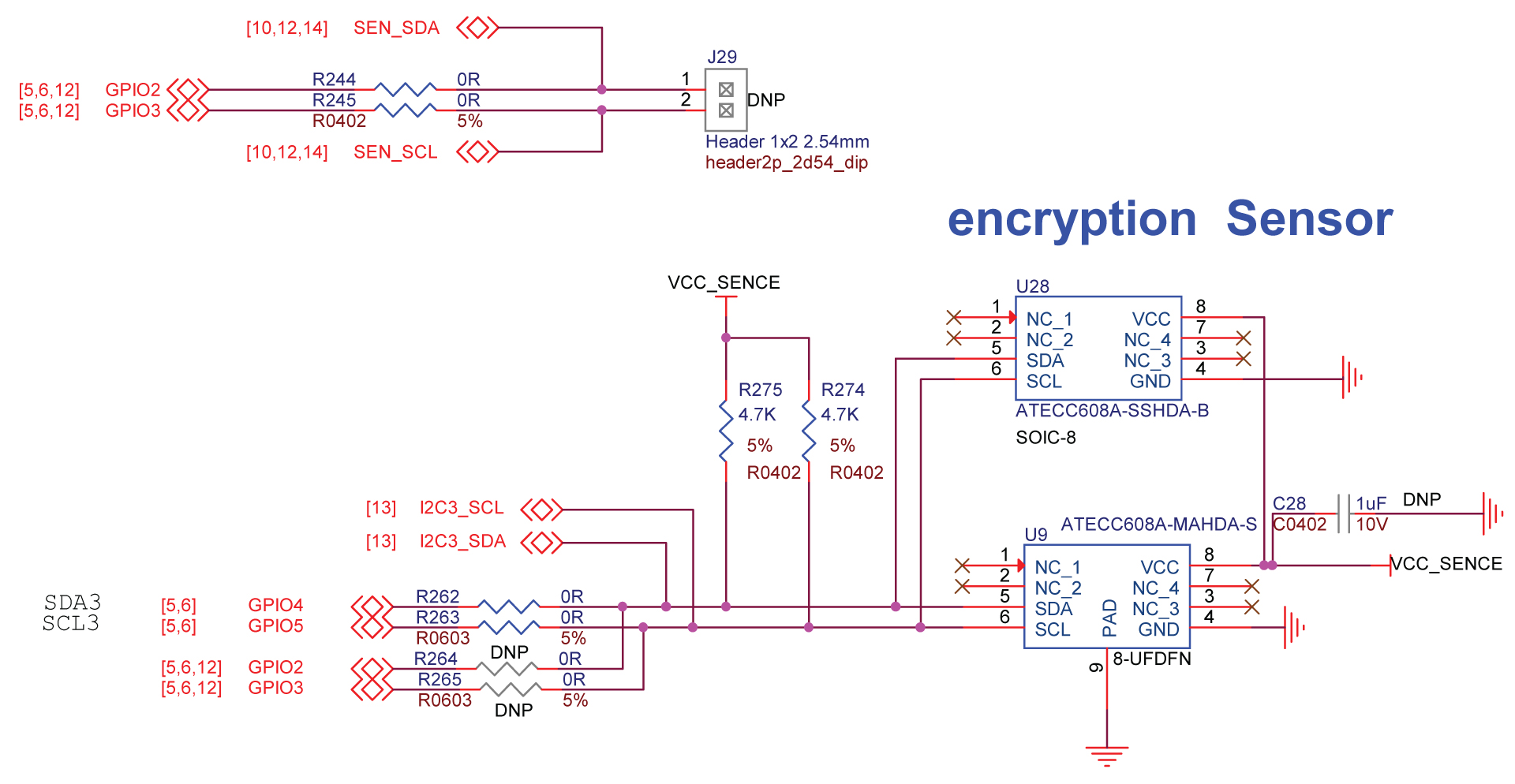
提示: 点击这里查看高分辨率图像
使用方法
- 步骤 1. 列出所有可用的 I2C 总线
i2cdetect -l
- 步骤 2. 扫描 I2C 总线 3 (i2c-3) 上的标准地址
i2cdetect -y 3

注意: 3 代表 I2C 总线编号
I2C 地址为 0x60 的设备是加密协处理器
在 Buildroot 镜像上的使用
- 使用方法如上所述
在 Yocto 镜像上的使用
- 开机时 I2C 未启用。每次启动后只有使用 modprobe i2c-dev 才能工作。一旦修复此问题,将会更新。
RTC
reTerminal 内置的 RTC 基于 NXP Semiconductors PCF8563T,使用 CR1220 电池 供电。它具有低备用电流;在 VDD = 3.0 V 和温度 = 25°C 时典型值为 0.25μA。它可用于需要实现计时功能的项目。
注意: 开箱即用已安装 CR1220 电池。
原理图

提示: 点击这里查看高分辨率图像
使用方法
输入以下命令从 RTC 获取日期和时间信息
sudo hwclock

在 Buildroot 镜像上的使用方法
- 首先输入 su - 来启用 root 账户
- 然后输入 hwclock
在 Yocto 镜像上的使用方法
- 不需要 sudo,因为我们已经以 root 身份登录
- 只需输入 hwclock
光传感器
reTerminal 配备了一个 Levelek LTR-303ALS-01 数字光传感器,它连接到 6 针 FPC 接口。它可以用来感知环境中的光照水平,也可以用于根据周围光照水平进行 LCD 背光的自动亮度调节。
原理图

提示: 点击这里查看更高分辨率的图像
使用方法
- 步骤 1. 启用 root 账户权限
sudo -i
- 步骤 2. 进入以下目录
cd /sys/bus/iio/devices/iio:device0
- 步骤 3. 输入以下内容以获取以勒克斯为单位的光强度值
cat in_illuminance_input

光传感器通过 I2C 通信协议 连接到 reTerminal。因此,如果您愿意,可以轻松地将其他 I2C 设备连接到这个 6 针 FPC 接口。连接图如下所示

之后,请按照前面主题中关于如何使用 I2C 的步骤进行操作
在 Buildroot 镜像上的使用
- 将 sudo -i 替换为 su - 以启用 root 账户权限
- 按照上述其他步骤进行操作
在 Yocto 镜像上的使用
- 不需要 sudo -i,因为我们已经以 root 身份登录
- 按照上述其他步骤进行操作
加速度计
内置的 STMicroelectronics LIS3DHTR 3 轴加速度计 可用于在 reTerminal 上实现许多不同的应用。您可以使用它在旋转 reTerminal 时自动更改屏幕方向等等。
原理图

提示: 点击 这里 查看高分辨率图像
使用方法
- 步骤 1. 打开 evtest 工具
evtest
- 步骤 2. 输入 1,您将看到 X、Y、Z 加速度值

在 Buildroot 镜像上的使用
- 您无需安装 evtest 工具,因为它已经安装了
- 在运行 evtest 之前,您需要通过输入 su - 切换到 root 用户
- 按照上述其他步骤操作
在 Yocto 镜像上的使用
- 您无需安装 evtest 工具,因为它已经安装了
- 按照上述其他步骤操作
蜂鸣器
reTerminal 内置了一个蜂鸣器。可以通过软件控制。这个蜂鸣器可以在不同应用中用作指示器。
原理图

提示: 点击这里查看高分辨率图像
使用方法
- 步骤 1. 启用 root 账户权限
sudo -i
- 步骤 2. 进入以下目录
cd /sys/class/leds/usr_buzzer
- 步骤 3. 打开蜂鸣器
echo 1 > brightness
- 步骤 4. 关闭蜂鸣器
echo 0 > brightness
在 Buildroot 镜像上的使用
- 使用 su - 替换 sudo -i 来启用 root 账户权限
- 按照上述提到的其他步骤进行操作
在 Yocto 镜像上的使用
- 不需要 sudo -i,因为我们已经以 root 身份登录
- 按照上述提到的步骤进行操作
USB 2.0 端口
Raspberry Pi CM4 已经板载了一个 USB 2.0 集线器。该集线器在 reTerminal 上扩展为 2 个 USB 2.0 端口,作为 USB HOST
原理图

提示: 点击这里查看更高分辨率的图像
使用方法
- 步骤 1. 将 USB 设备连接到 reTerminal 上的其中一个 USB 2.0 端口

- 步骤 2. 在终端窗口中输入以下命令来列出已连接的 USB 设备
lsusb

- 步骤 3. 输入以下命令来收集有关已连接 USB 设备的更多信息,如驱动器大小、分区、挂载点等
lsblk

- 步骤 4. 访问连接的 USB 设备并列出其中的所有文件
cd /media/pi/NEW VOLUME
ls -l

注意: 挂载点会因USB设备而异
Micro - SD卡插槽
reTerminal配备了一个micro-sd卡插槽。当您想要将操作系统安装到micro-SD卡上,同时使用不带eMMC的CM4模块时,这非常有用。建议使用至少8GB的卡。点击此链接了解更多!
原理图
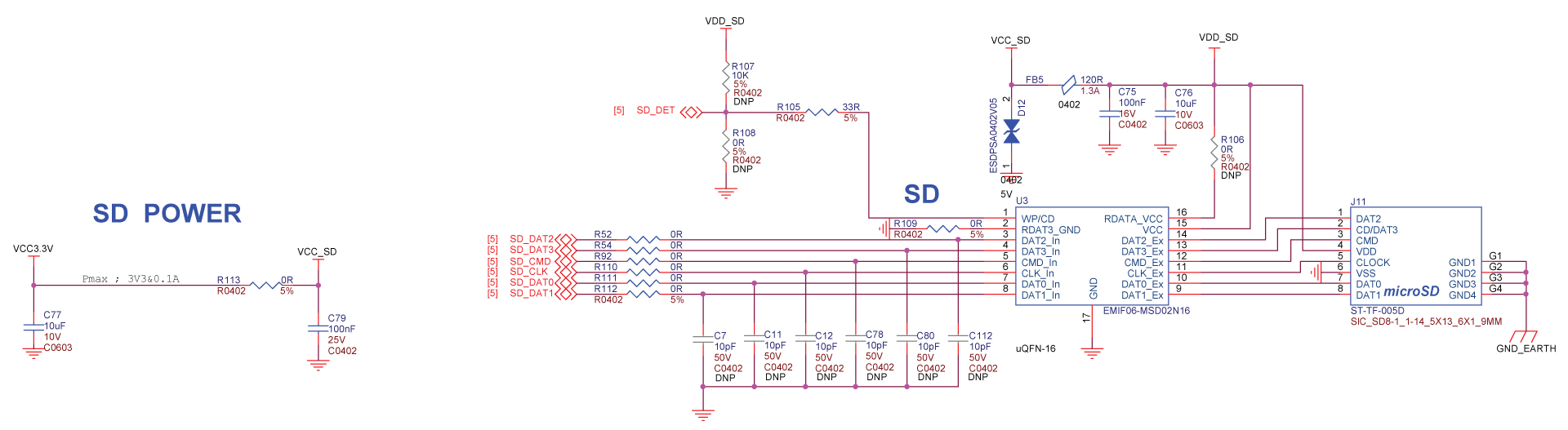
提示: 点击这里查看高分辨率图像
Micro HDMI端口
reTerminal上有一个micro HDMI端口,您可以使用它通过micro HDMI转标准HDMI线缆连接到HDMI显示器。它支持高达4K分辨率,60fps。
原理图

提示: 点击这里查看高分辨率图像
使用方法
- 步骤1. 使用micro-HDMI转标准HDMI线缆将HDMI显示器连接到reTerminal的micro-HDMI端口

- 步骤2. 打开reTerminal,您将在reTerminal LCD和连接的HDMI显示器上都看到UI输出
注意: 如果您在reTerminal开机时连接显示器,需要输入sudo service lightdm restart来在连接的HDMI显示器上显示UI。
- 步骤3. 在终端窗口中输入以下命令来安装屏幕配置实用程序
sudo apt install arandr
- 步骤 4. 点击左上角的树莓派图标,导航到
Preferences > Screen Configuration

- 步骤 5. 在 Screen Layout Editor 窗口中,导航到
Configure > Screens > HDMI-1 > Resolution并调整选择连接的 HDMI 显示器的分辨率。

注意: 您也可以更改显示器的频率和方向
- 步骤 6. 拖动两个框来更改显示器的排列。

- 步骤 7. 点击勾选标记来应用设置

在 Buildroot/ Yocto 镜像上的使用
- 热插拔目前不工作。一旦修复,这将会更新。
- 所以您需要先连接到 HDMI 显示器,然后打开 reTerminal
- 注意 arandr 包在 Buildroot 系统镜像中不可用
USB Type-C 端口
reTerminal 上的 USB Type-C 端口可以用来使用 5V/4A(推荐)为 reTerminal 供电。但是它也可以用作 USB 设备,您可以将 reTerminal 连接到主机 PC,reTerminal 将充当 USB 大容量存储设备。在这里,您将能够通过 PC 访问 reTerminal 的板载 eMMC 并将操作系统刷写到 eMMC。点击这里了解更多!

标准相机支架(1/4 英寸)
reTerminal 有一个直径为 1/4 英寸的标准相机支架。所以您可以将 reTerminal 连接到标准三脚架。

reTerminal 的 Python 库
我们准备了一个 Python 库,使您能够使用 reTerminal 上的板载硬件。目前可以使用这个 Python 库访问加速度计、用户 LED、用户按钮和蜂鸣器。
安装
在 reTerminal 上打开终端窗口并执行以下命令
sudo pip3 install seeed-python-reterminal
注意: 源代码可以在这里找到
使用方法
- 步骤 1. 创建一个新的 python 文件 并使用 nano 文本编辑器 打开
nano test.py
-
步骤 2. 输入 python 代码
-
步骤 3. 按 CTRL + X 然后按 Y 保存文件
-
步骤 4. 最后运行文件
python3 test.py
您可以按照上述步骤测试以下硬件功能。每个部分包含的Python代码可以直接输入到test.py文件中,然后执行该文件
用户LED测试
import seeed_python_reterminal.core as rt
import time
print("STA ON, USR OFF")
rt.sta_led = True
rt.usr_led = False
time.sleep(1)
print("STA OFF, USR ON")
rt.sta_led = False
rt.usr_led = True
time.sleep(1)
print("STA RED, USR OFF")
rt.sta_led_green = False
rt.sta_led_red = True
rt.usr_led = False
time.sleep(1)
print("STA OFF, USR OFF")
rt.sta_led = False
rt.usr_led = False
Buzzer Test
import seeed_python_reterminal.core as rt
import time
print("BUZZER ON")
rt.buzzer = True
time.sleep(1)
print("BUZZER OFF")
rt.buzzer = False
User Buttons Test
import seeed_python_reterminal.core as rt
import seeed_python_reterminal.button as rt_btn
device = rt.get_button_device()
while True:
for event in device.read_loop():
buttonEvent = rt_btn.ButtonEvent(event)
if buttonEvent.name != None:
print(f"name={str(buttonEvent.name)} value={buttonEvent.value}")
Accelerometer Test
import seeed_python_reterminal.core as rt
import seeed_python_reterminal.acceleration as rt_accel
device = rt.get_acceleration_device()
while True:
for event in device.read_loop():
accelEvent = rt_accel.AccelerationEvent(event)
if accelEvent.name != None:
print(f"name={str(accelEvent.name)} value={accelEvent.value}")
Accelerometer and Buttons Test
import asyncio
import seeed_python_reterminal.core as rt
import seeed_python_reterminal.acceleration as rt_accel
import seeed_python_reterminal.button as rt_btn
async def accel_coroutine(device):
async for event in device.async_read_loop():
accelEvent = rt_accel.AccelerationEvent(event)
if accelEvent.name != None:
print(f"accel name={str(accelEvent.name)} value={accelEvent.value}")
async def btn_coroutine(device):
async for event in device.async_read_loop():
buttonEvent = rt_btn.ButtonEvent(event)
if buttonEvent.name != None:
print(f"name={str(buttonEvent.name)} value={buttonEvent.value}")
accel_device = rt.get_acceleration_device()
btn_device = rt.get_button_device()
asyncio.ensure_future(accel_coroutine(accel_device))
asyncio.ensure_future(btn_coroutine(btn_device))
loop = asyncio.get_event_loop()
loop.run_forever()
在 Buildroot 镜像上的使用
- 此库稍后将添加到 Buildroot 镜像中
- 首先输入 su - 启用 root 账户
- 然后输入 pip3 install seeed-python-reterminal
- 创建 Python 文件时使用 vi 作为文本编辑器
- 加速度计 + 按钮演示存在问题。一旦修复将会更新
在 Yocto 镜像上的使用
- 尽管已安装 Python,但未安装 pip。我们稍后会将此库打包到系统镜像中
技术支持与产品讨论
感谢您选择我们的产品!我们在此为您提供不同的支持,以确保您使用我们产品的体验尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。