高级媒体控制
本页面描述了微调摄像头和声音系统的高级设置。
摄像头
Raspberry Pi摄像头可以使用以下命令检测:
rpicam-hello --list
# 可用摄像头
# -----------------
# 0 : imx708_wide [4608x2592 10-bit RGGB] (/base/soc/i2c0mux/i2c@0/imx708@1a)
# Modes: 'SRGGB10_CSI2P' : 1536x864 [120.13 fps - (768, 432)/3072x1728 crop]
# 2304x1296 [56.03 fps - (0, 0)/4608x2592 crop]
# 4608x2592 [14.35 fps - (0, 0)/4608x2592 crop]
使用Reachy Mini拍照:
rpicam-still -t 1 -r -o test.jpg --width 4608 --height 2592
# 将图片复制到您的电脑
# scp [email protected]:/home/pollen/test.jpg .
所有摄像头控件都在官方文档中详细说明。例如,您可以更改自动对焦设置:
rpicam-still -t 1 -r -o test.jpg --width 4608 --height 2592 --autofocus-mode manual --lens-position 0
rpicam-still -t 1 -r -o test.jpg --width 4608 --height 2592 --autofocus-mode manual --lens-position 1000
在SDK级别,摄像头通过libcamerasrc组件由GStreamer控制。您可以使用以下命令查看可用参数:
gst-inspect-1.0 libcamerasrc
然后,代码可以如下调整:
def _configure_video(
self, cam_path: str, pipeline: Gst.Pipeline, webrtcsink: Gst.Element
) -> None:
self._logger.debug(f"Configuring video {cam_path}")
camerasrc = Gst.ElementFactory.make("libcamerasrc")
# camerasrc.set_property("af-mode", "manual")
# camerasrc.set_property("lens-position", 1000)
麦克风和扬声器
4麦克风阵列基于Seeed的reSpeaker XMOS XVF3800。它还提供音频输出。默认情况下,音频处理器执行声学回声消除(AEC),因此扬声器的输出会在麦克风输入中被消除。这样机器人就不会听到自己。
它在系统中显示为Pollen Robotics Reachy Mini Audio。音量控制可以通过alsamixer调整。按F6选择声卡,F5可视化输入和输出音量。建议将所有内容保持在100%,除了PCM(输出音量),您可以根据需要进行调整。
AEC和其他音频过滤可以通过XMOS XVF3800进行调整。高级用户可以参考官方文档以更好地理解声音处理。参数的摘要列在此页面上。
要访问这些参数,请使用我们的助手Python脚本audio_control_utils.py:
# 读取参数
python src/reachy_mini/media/audio_control_utils.py PP_MIN_NS
# 输出:
# PP_MIN_NS: (0.15000000596046448,)
# 写入参数
python src/reachy_mini/media/audio_control_utils.py PP_MIN_NS --values 0
# 输出:
# Writing to PP_MIN_NS with values: [0.0]
# Write operation completed successfully
麦克风阵列输出立体声通道,因此无法同时获取所有4个麦克风的原始输出。但是,您可以一次输出两个原始麦克风:
# 麦克风0 - 左通道
python audio_control_utils.py AUDIO_MGR_OP_L --values 3 0
# 麦克风1 - 右通道
python audio_control_utils.py AUDIO_MGR_OP_R --values 3 1
# 麦克风2 - 左通道
python audio_control_utils.py AUDIO_MGR_OP_L --values 3 2
# 麦克风3 - 右通道
python audio_control_utils.py AUDIO_MGR_OP_R --values 3 3
线性阵列的布局如下:
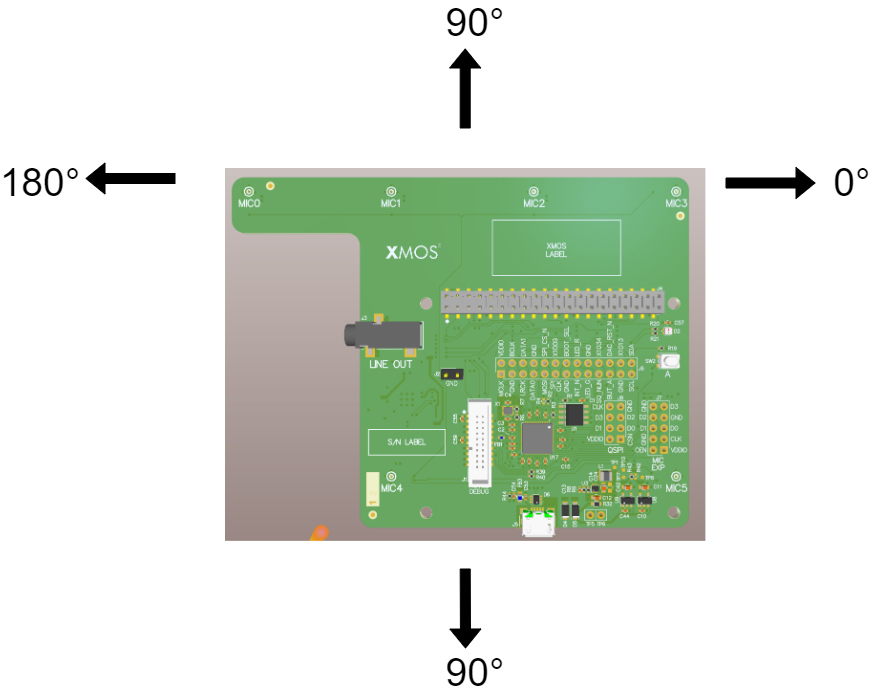
Reachy Mini的右天线靠近麦克风0,而左天线靠近麦克风3。
声音到达方向
多亏了4个麦克风,系统可以估计声音的到达方向(DoA)。方向根据上面的布局给出。
python src/reachy_mini/media/audio_control_utils.py DOA_VALUE
# 输出
# DOA_VALUE: [0, 133, 0, 0, 0, 1, 0, 0, 0]
python src/reachy_mini/media/audio_control_utils.py DOA_VALUE_RADIANS
# 输出
# DOA_VALUE_RADIANS: (0.5410520434379578, 1.0)
此功能也可以直接从SDK获得。