RealSense 三维分割
设备简介
RealSense™ D405

RealSense™ D405 深度相机是一款短距离双目立体相机,专为近距离计算机视觉需求提供亚毫米级精度。其理想工作范围为 7 cm 至 50 cm,配备高分辨率全局快门传感器,并利用图像信号处理器(ISP)在无需专用 RGB 传感器的情况下生成匹配的 RGB 数据。这款紧凑型相机专为精密机器人、医疗成像和自动化检测场景优化。
RealSense™ D435i

RealSense™ D435i 深度相机是一款集深度感知与运动追踪于一体的双目立体相机,专为机器人、三维重建、SLAM 与自动化感知应用而设计。它采用主动双目深度技术,具备宽视场角、全局快门深度传感器、RGB 彩色成像以及内置 IMU,可同步输出深度、彩色与运动数据。这款紧凑型相机适用于移动机器人避障、空间建模、路径规划和实时环境感知等近中距离计算机视觉场景。
介绍
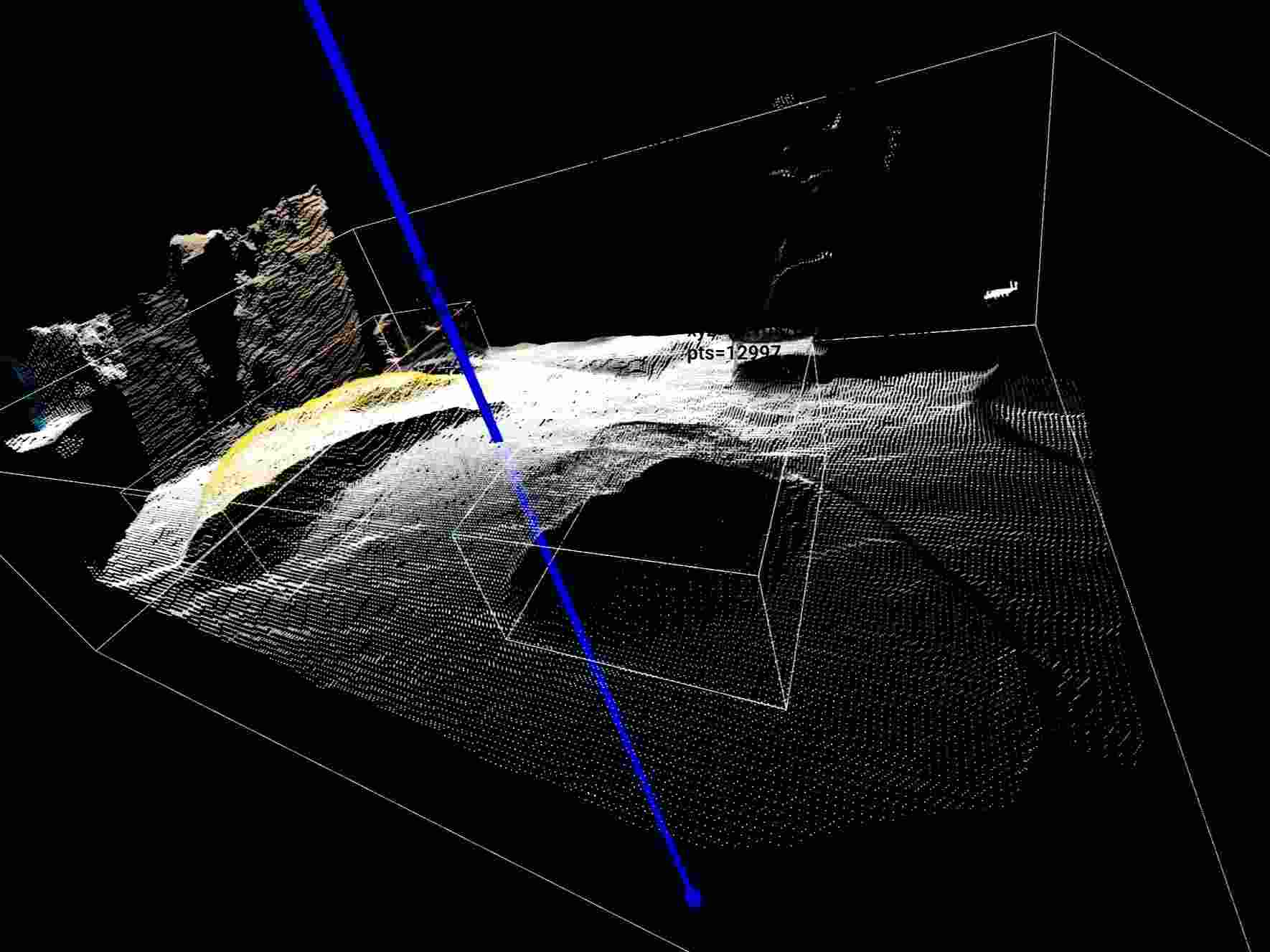
本 Demo 基于 OpenCV 分割技术,利用深度相机进行点云重建,并针对点云进行目标物体框选,输出如下信息:
-
物体类型
-
物体中心的 XYZ 坐标
-
物体框选尺寸
-
物体框的偏角
同时支持通过 Open3D 进行可视化。该方案适用于桌面抓取、目标定位、候选抓取位姿筛选等机器人感知任务,可为机械臂抓取规划与后续操作提供稳定的三维几何信息。
先决条件
- RealSense™ D435i 或 RealSense™ D405
快速开始
1. 获取项目代码
首先将项目克隆到本地,并进入项目目录:
git clone [email protected]:Miscanthus40076/TabletopSeg3D.git
cd TabletopSeg3D
说明:以下安装与运行命令默认均在项目根目录
TabletopSeg3D下执行。
2. Python 虚拟环境
建议使用独立的 Python 虚拟环境,推荐版本为 Python 3.11。
使用 conda 创建环境:
conda create -n tabletopseg3d python=3.11
conda activate tabletopseg3d
使用 venv 创建环境:
python3.11 -m venv .venv
source .venv/bin/activate
3. 系统依赖
在运行本项目之前,系统需具备 Intel RealSense SDK / librealsense 运行环境,用于支持深度相机的数据采集与驱动访问。
说明如下:
-
若仅进行代码阅读、文档编写或静态分析,可暂不安装该依赖
-
若需要实际连接深度相机运行本 Demo,则必须提前完成安装
4. Python 依赖安装
本项目提供两种推荐安装路径:
-
CPU 默认安装路径
-
GPU 加速安装路径
用户可根据本机硬件条件选择对应方案。
3.1 CPU 默认安装
执行以下命令安装项目依赖:
python -m pip install -r requirements.txt
3.2 GPU 加速
对于具备 NVIDIA GPU 且已正确配置 CUDA 环境的设备,可采用 GPU 安装方式,以提升 YOLO 分割推理效率。
在进行 GPU 安装前,请确认系统已满足以下条件:
-
已安装 NVIDIA 显卡驱动
-
已安装与驱动兼容的 CUDA 运行环境
-
计划安装与本机 CUDA 版本匹配的 GPU 版
torch与torchvision
安装与本机 CUDA 版本匹配的 GPU 版 torch 与 torchvision:
pip install torch torchvision --index-url https://download.pytorch.org/whl/cuXXX
其中:
-
cuXXX需替换为实际对应的 CUDA 版本标识 -
常见示例包括
cu121、cu124
5. 运行
5.1 获取设备序列号
python scripts/realtime_open3d_scene.py --list-devices
5.2 启动可视化模式
将序列号替换为实际设备序列号:
python scripts/realtime_open3d_scene.py \
--serial 419522072950 \
--device cpu \
--show-labels
5.3 无界面运行
若不需要 Open3D 图形界面,而是希望直接获取每帧的结构化检测结果,可使用无界面模式运行:
python scripts/realtime_open3d_scene.py \
--serial 419522072950 \
--device cpu \
--frames 10 \
--no-display
该模式下,程序将按帧输出 JSON 数据,主要包括:
-
目标类别
-
目标中心点的三维坐标
-
目标包围框尺寸
-
目标包围框偏角
yaw
5.4 D405 推荐参数
对于 D405 这类近距离深度相机,通常建议同时收紧有效深度范围,以获得更稳定的点云结果。
python scripts/realtime_open3d_scene.py \
--serial 409122273421 \
--device cpu \
--min-depth 0.02 \
--max-depth 0.50