在 Jetson 上运行 reBot Arm B601-DM 的 GraspNet 视觉抓取
本维基说明如何在 NVIDIA Jetson 上部署 reBot Arm B601-DM 视觉抓取演示。该演示结合 RGB-D 相机、YOLO 实例分割、GraspNet 六自由度抓取姿态估计、手眼标定以及真实机器人控制,使机械臂能够在桌面上选择并抓取常见物体。
本指南 1.0 版本聚焦于可靠的单 Jetson 部署和日常操作流程。默认配置使用 Orbbec Gemini 2 作为 RGB-D 相机,使用 YOLO11n-seg TensorRT 进行目标筛选,并使用 GraspNet 生成通用的六自由度抓取姿态。

| reBot Arm B601-DM Bundle with Jetson Orin |
|---|
 |
你将构建什么
运行时流水线为:
Orbbec Gemini 2 RGB-D camera
|
YOLO instance segmentation for target filtering
|
GraspNet 6-DoF grasp pose estimation
|
Eye-in-hand calibration transform
|
reBot Arm IK trajectory and gripper force control
|
Optional base rotation and object placement
本项目提供三种实用的系统使用方式:
| 模式 | 入口脚本 | 典型用途 |
|---|---|---|
| Web UI | scripts/grasp_web.py | 实时视频、目标选择、抓取预览、真实抓取、偏移调试 |
| CLI | scripts/grasp.py | 无界面抓取或脚本化测试 |
| HTTP API | scripts/grasp_curl.sh and scripts/grasp_api_client.py | 远程控制、自动化、与其他应用集成 |
硬件与系统准备
在开始之前准备以下硬件:
- reBot Arm B601-DM
- 运行 JetPack 6.x 或 JetPack 7.x 的 NVIDIA Jetson 设备
- Orbbec Gemini 2 RGB-D 相机
- 用于机器人 CAN 总线的 USB2CAN 适配器
- 相机用 USB 3.0 线缆
- 用于手眼标定的 ArUco 标记,
DICT_4X4_50,ID0,边长 0.1 m - 一张稳定的桌子、机械臂周围足够的空隙,以及紧急断电方式
本演示会驱动真实机械臂。在所有运动测试和抓取测试期间,请将手、线缆和松散物体远离机械臂工作空间。先从 --dry-run、只读检查和小幅度点动开始,再启用完整的机器人执行。
连接硬件:
- 通过 USB 3.0 将 Gemini 2 连接到 Jetson。
- 将 USB2CAN 适配器连接到 reBot Arm 的 CAN 总线,然后连接到 Jetson。
- 给 reBot Arm 上电。
- 确认设备可见:
lsusb
ls /dev/ttyUSB* /dev/ttyACM* 2>/dev/null || true
首次上电时临时设置设备权限:
sudo chmod a+rw /dev/bus/usb/*/*
sudo chmod 666 /dev/ttyUSB0 2>/dev/null || true
sudo chmod 666 /dev/ttyACM0 2>/dev/null || true
对于串口设备,也建议将当前用户加入 dialout 组,然后注销并重新登录:
sudo usermod -aG dialout $USER
在 Jetson 上部署项目
步骤 1. 安装系统软件包和 Miniconda
sudo apt update
sudo apt install -y git wget curl build-essential cmake libusb-1.0-0-dev python3-pip
wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-aarch64.sh
bash Miniconda3-latest-Linux-aarch64.sh
source ~/.bashrc
步骤 2. 克隆项目
git clone https://github.com/jjjadand/reBot-DevArm-Grasp.git rebot_grasp-jetson
cd rebot_grasp-jetson
如果你使用的是内部软件包而不是公共仓库,请将该项目目录拷贝到 Jetson 上,并在项目根目录下运行后续命令。
步骤 3. 创建 Python 环境
在 JetPack 6.x 上使用 Python 3.10。在 JetPack 7.x / Thor 上使用 Python 3.12。
# JetPack 6.x
conda create -y -n graspnet python=3.10
# JetPack 7.x / Thor
# conda create -y -n graspnet python=3.12
conda activate graspnet
python -m pip install -U pip wheel setuptools
检查你的 JetPack 和 CUDA 版本:
cat /etc/nv_tegra_release
nvcc --version
步骤 4. 安装适用于 Jetson 的 PyTorch
不要在 Jetson 上安装通用的 PyPI CPU/GPU PyTorch 软件包。请安装与你的 JetPack、Python 和 CUDA 版本匹配的 wheel。对于 reComputer 用户,也可以参考专门的指南:Install Pytorch for reComputer Jetson。
常见的起点包括:
# JetPack 6.x, CUDA 12.x, Python 3.10
pip install --extra-index-url https://pypi.jetson-ai-lab.io/jp6/cu126 torch torchvision
# JetPack 7.x / Thor, CUDA 13.x, Python 3.12
pip install --extra-index-url https://pypi.jetson-ai-lab.io/sbsa/cu130 torch torchvision
在 Python 中验证 CUDA:
python - <<'PY'
import torch
print("torch:", torch.__version__)
print("cuda available:", torch.cuda.is_available())
print("device:", torch.cuda.get_device_name(0) if torch.cuda.is_available() else "none")
PY
在继续之前,cuda available 必须为 True。
步骤 5. 安装 Python 依赖
pip install -r requirements-graspnet-jetson.txt
步骤 6. 安装机器人、GraspNet 和 GraspNet API SDK
mkdir -p sdk
git clone https://github.com/vectorBH6/reBotArm_control_py.git sdk/reBotArm_control_py
pip install -e sdk/reBotArm_control_py
git clone https://github.com/graspnet/graspnet-baseline.git sdk/graspnet-baseline
git clone https://github.com/graspnet/graspnetAPI.git sdk/graspnetAPI
pip install -e sdk/graspnetAPI
从 GraspNet 下载页面下载 GraspNet 预训练 checkpoint,并将其放在这里:
sdk/graspnet-baseline/checkpoints/checkpoint-rs.tar
步骤 7. 设置 CUDA 路径并构建 GraspNet CUDA 算子
根据你的 JetPack 版本设置 CUDA 路径:
# JetPack 6.x example
export CUDA_HOME=/usr/local/cuda-12.6
# JetPack 7.x / Thor example
# export CUDA_HOME=/usr/local/cuda-13.0
export PATH="$CUDA_HOME/bin:$PATH"
export LD_LIBRARY_PATH="$CUDA_HOME/lib64:$LD_LIBRARY_PATH"
构建 GraspNet 使用的 CUDA 扩展:
bash scripts/install_graspnet_cuda_ops.sh
bash scripts/install_graspnet_cuda_ops.sh --check
如果之后更换了 JetPack、Python、CUDA 或 PyTorch,请使用以下命令重新构建:
bash scripts/install_graspnet_cuda_ops.sh --force
步骤 8. 安装 Orbbec 相机 SDK
本项目包含一个辅助脚本,可将 pyorbbecsdk2 安装到当前激活的 Python 环境中:
bash scripts/install_pyorbbecsdk.sh
如果你需要在本地构建 SDK,请先克隆源码树并运行源码模式:
git clone https://github.com/orbbec/pyorbbecsdk.git sdk/pyorbbecsdk
bash scripts/install_pyorbbecsdk.sh --from-source
在 SDK 源码树可用时安装 Orbbec udev 规则:
sudo bash sdk/pyorbbecsdk/scripts/env_setup/install_udev_rules.sh
sudo udevadm control --reload-rules
sudo udevadm trigger
步骤 9. 在目标 Jetson 上下载 YOLO 权重并导出 TensorRT
TensorRT 引擎文件与设备相关。务必在将要运行演示的那台 Jetson 上导出 .engine。
mkdir -p models
wget https://github.com/ultralytics/assets/releases/download/v8.3.0/yolo11n-seg.pt -O models/yolo11n-seg.pt
yolo export model=models/yolo11n-seg.pt format=engine imgsz=640 half=True device=0 workspace=4
预期输出为:
models/yolo11n-seg.engine
如果在你的平台上 FP16 导出失败,请在不使用 half=True 的情况下导出:
yolo export model=models/yolo11n-seg.pt format=engine imgsz=640 device=0 workspace=4
验证与标定
在尝试真实抓取之前,按顺序运行以下检查。
1. 检查 RGB-D 相机
conda activate graspnet
cd ~/rebot_grasp-jetson
python scripts/verify_pyorbbec_stream.py
python scripts/verify_pyorbbec_stream.py --preview --seconds 10
纯文本检查应报告 RGB 和深度帧信息。预览检查在有桌面显示时应弹出 RGB 和深度窗口。
2. 检查机器人连接
先以只读模式启动:
python scripts/verify_rebot_arm_motion.py --read-only
在确认机械臂运动路径安全后,再运行一个小幅度的关节 6 点动:
python scripts/verify_rebot_arm_motion.py --deg 5
3. 检查 GraspNet 栈
python scripts/verify_graspnet_stack.py
如果相机尚未连接,但你只想检查 Python、CUDA、GraspNet 和 YOLO 文件:
python scripts/verify_graspnet_stack.py --skip-camera
4. 执行手眼标定
本项目使用手眼标定:相机安装在末端执行器上,ArUco 标记固定在桌面上。默认配置期望使用 DICT_4X4_50、ID 0、边长 0.1 m 的标记。仓库中包含可打印的标记文件,例如 aruco100x100.pdf。
自动采集:
python scripts/collect_handeye_eih.py
带重力补偿的手动采集:
python scripts/collect_handeye_eih.py --manual
标定结果会保存在当前相机目录下:
config/calibration/orbbec_gemini2/hand_eye.npz
config/calibration/orbbec_gemini2/intrinsics.npz
验证已保存的标定结果:
python scripts/verify_handeye_calibration.py
每当相机支架、夹爪、ArUco 板尺寸或桌面几何结构发生变化时,请重新标定。
运行 Web 演示
Web UI 是推荐的首选用户界面。它提供实时 MJPEG 视频、目标选择、抓取预览、真实抓取执行、补偿调节、基座点动、夹爪控制、就绪姿态和复位操作。
先以预览模式启动。此模式不会执行真实的机器人运动:
conda activate graspnet
cd ~/rebot_grasp-jetson
python scripts/grasp_web.py \
--host 0.0.0.0 \
--port 8090 \
--num-point 12000 \
--cloud-crop-nsample 32
在浏览器中打开 Web UI:
http://<jetson_ip>:8090
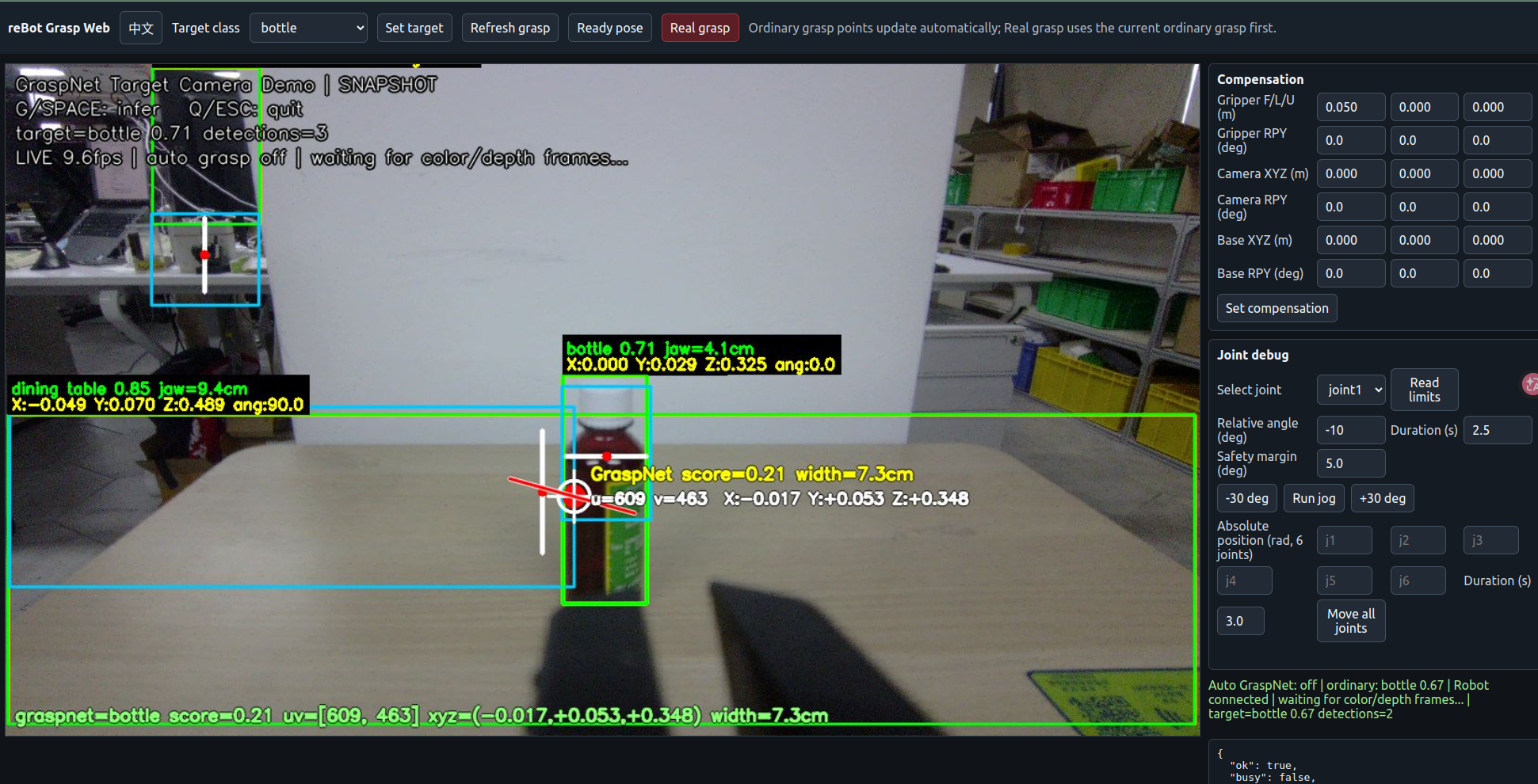
使用预览模式确认相机视频流、YOLO 检测、目标过滤和抓取点生成。在 Web UI 中点击推理或刷新控件以更新 GraspNet 预览。
当场景稳定且验证步骤通过后,开始真实机器人执行:
python scripts/grasp_web.py \
--host 0.0.0.0 \
--port 8090 \
--enable-robot \
--num-point 12000 \
--cloud-crop-nsample 32
在首次真实测试时,禁用抓取后的放置,这样机械臂只执行抓取和回收动作:
python scripts/grasp_web.py \
--host 0.0.0.0 \
--port 8090 \
--enable-robot \
--no-place-after-grasp \
--num-point 12000 \
--cloud-crop-nsample 32
有用的启动选项:
| 选项 | 作用 |
|---|---|
--enable-robot | 允许真实机械臂和夹爪运动 |
--target-class cup | 预先选择一个目标类别 |
--no-yolo | 禁用 YOLO 过滤并运行全场景 GraspNet |
--camera-type orbbec_gemini2 | 强制指定相机驱动 |
--no-place-after-grasp | 抓取后跳过基座旋转和放置 |
--num-point 12000 | 降低 GraspNet 点数以适配 Jetson 内存 |
--cloud-crop-nsample 32 | 降低 CloudCrop 采样数以适配 Jetson 内存 |
--graspnet-interval 2.0 | 设置启用时 GraspNet 自动更新间隔 |
常规 Web UI 工作流程为:
- 点击 Ready 将机械臂移动到就绪姿态。
- 选择一个目标类别,或留空以使用检测到的物体。
- 点击 Infer 或 Refresh 以计算抓取位姿。
- 检查视频中的抓取标记是否合理。
- 如有需要,调整夹爪、相机或基座补偿。
- 仅在机械臂路径无障碍时点击 Real Grasp。
- 当场景发生变化或机器人需要回到安全状态时使用 Reset。
补偿值用于修正小的机械和标定误差。在 Web UI 中调节完成后,将这些值持久化到 config/compensation.json,或将稳定的数值复制到你的部署记录中。请使用小步长,例如位置偏移为 0.005 m,旋转偏移为 1 到 2 度。
CLI 和 API 用法
对于无界面的空跑测试,请使用:
python scripts/grasp.py --dry-run --camera-type orbbec_gemini2 --target-class cup
对于不使用 YOLO 过滤的全场景 GraspNet:
python scripts/grasp.py --dry-run --camera-type orbbec_gemini2 --no-yolo
对于真实的 CLI 执行:
python scripts/grasp.py --camera-type orbbec_gemini2 --target-class cup
在 CLI 调试期间禁用放置:
python scripts/grasp.py \
--camera-type orbbec_gemini2 \
--target-class cup \
--no-place-after-grasp
若要在不执行机器人动作的情况下查看 GraspNet 实时输出:
python scripts/graspnet_camera_demo.py --auto --target-class cup
python scripts/graspnet_camera_demo.py --auto --no-yolo --no-visualizer
对于 HTTP 自动化,使用辅助脚本启动 Web 服务:
bash scripts/grasp_curl.sh serve --enable-robot --no-auto-graspnet
在另一个终端中:
bash scripts/grasp_curl.sh state
bash scripts/grasp_curl.sh ready
bash scripts/grasp_curl.sh target bottle
bash scripts/grasp_curl.sh infer
bash scripts/grasp_curl.sh grasp
bash scripts/grasp_curl.sh reset
同样的操作也可以直接通过 curl 调用:
BASE=http://127.0.0.1:8090
curl -s "$BASE/state"
curl -s -X POST "$BASE/ready" -H "Content-Type: application/json" -d "{}"
curl -s -X POST "$BASE/target" -H "Content-Type: application/json" -d '{"class_name":"bottle"}'
curl -s -X POST "$BASE/infer" -H "Content-Type: application/json" -d "{}"
curl -s -X POST "$BASE/grasp" -H "Content-Type: application/json" -d "{}"
其他有用的端点:
| 端点 | 方法 | 作用 |
|---|---|---|
/state | GET | 当前检测、抓取和 Web 运行时状态 |
/robot/state | GET | 机器人关节、TCP 位姿、夹爪状态 |
/stream.mjpg | GET | MJPEG 相机视频流 |
/compensation | POST | 设置夹爪、相机和基座补偿 |
/joint/limits | GET | 读取关节位置和限制 |
/joint/jog | POST | 点动单个关节,通常为基座测试的 joint1 |
/move/joints | POST | 将所有关节移动到绝对位置 |
/move/pose | POST | 通过 IK 或轨迹模式将 TCP 移动到目标位姿 |
/gripper | POST | 打开、关闭、释放或读取夹爪状态 |
/auto_grasp | POST | 运行后台目标搜索和抓取循环 |
配置与调优
主要配置文件为:
config/default.yaml
默认相机设置:
camera:
type: orbbec_gemini2
color_width: 1280
color_height: 720
depth_width: 1280
depth_height: 720
fps: 30
默认检测和 GraspNet 设置:
yolo:
model_name: "yolo11n-seg.engine"
device: "auto"
graspnet:
checkpoint: "checkpoint-rs.tar"
默认放置行为:
grasp_pipeline:
place:
enabled: true
base_joint: joint1
base_delta_deg: 90.0
base_direction: auto
base_rotate_duration: 2.5
base_safety_margin_deg: 5.0
return_home: false
如果夹爪持续抓偏目标,请按以下顺序调节:
| 现象 | 首要调节对象 |
|---|---|
| 夹爪在前后方向偏差过大 | grasp_forward_offset / Web 夹爪前向补偿 |
| 夹爪在左右方向抓偏 | grasp_lateral_offset 或相机 X/Y 补偿 |
| 夹爪过高或过低 | grasp_vertical_offset 或相机 Z 补偿 |
| 腕部角度错误 | 夹爪滚转、俯仰、偏航补偿 |
| 所有抓取都向同一方向偏移 | 相机或基座补偿 |
演示视频
故障排查
torch.cuda.is_available() 返回 False:请重新安装与 JetPack 匹配的 PyTorch wheel。通用 PyPI torch 不适用于 Jetson 部署。
出现 No module named pointnet2._ext 或 No module named knn_pytorch.knn_pytorch:请重新构建 GraspNet CUDA 算子:
bash scripts/install_graspnet_cuda_ops.sh --force
出现 pyorbbecsdk import failed 或相机无法打开:请重新安装 SDK 并检查 USB 权限:
bash scripts/install_pyorbbecsdk.sh
sudo chmod a+rw /dev/bus/usb/*/*
python scripts/verify_pyorbbec_stream.py
YOLO .engine 加载失败:请在同一台 Jetson 上重新导出。不同 Jetson 型号、JetPack 版本或 TensorRT 版本之间不应拷贝 engine 文件。
ArUco 标记未被检测到:请确认标记字典为 DICT_4X4_50,ID 为 0,标记边长为 0.1 m,光照稳定,且标记平整且完全可见。
机器人已连接但运动失败:运行 verify_rebot_arm_motion.py --read-only,确认 USB2CAN 设备,检查电机电源,并在重试抓取执行前测试一个小的 --deg 5 点动。
GraspNet 内存不足:请减小 --num-point,减小 --cloud-crop-nsample,关闭桌面应用程序,并避免同时运行多个高负载推理进程。
资源
- reBot Arm GraspNet 演示参考:https://github.com/EclipseaHime017/reBot-DevArm-Grasp
- reBot Arm SDK:https://github.com/vectorBH6/reBotArm_control_py
- GraspNet baseline:https://github.com/graspnet/graspnet-baseline
- GraspNet API:https://github.com/graspnet/graspnetAPI
- Orbbec pyorbbecsdk:https://github.com/orbbec/pyorbbecsdk
- 为 reComputer Jetson 安装 Pytorch:https://wiki.seeedstudio.com/cn/install_torch_on_recomputer/
技术支持与产品讨论
感谢您选择我们的产品!我们提供多种支持渠道用于提问、讨论和问题反馈。