reBot Arm B601-DM 的 Pinocchio 与 MeshCat 入门指南

本文环境
本教程测试环境如下:
| 项目 | 要求 |
|---|---|
| 发行商 ID | Ubuntu |
| 描述 | Ubuntu 22.04.5 LTS |
| 版本 | 22.04 |
| 开发代号 | Jammy |
reBotArm_control 仓库克隆
cd ~/
git clone https://github.com/vectorBH6/reBotArm_control/tree/main
cd reBotArm_control
git switch robotpkg-ver
# main默认为本地编译版本,切换到robotpkg_dev分支以使用以下robotpkg&uv安装教程
安装 Pinocchio
tip
TODO
安装 Pinocchio
通过以下命令安装 Pinocchio 及其依赖:
TODO
uv pip install pin
安装 uv
MeshCat 是一个基于 Web 的 3D 可视化工具,常用于机器人学的可视化展示。
安装 uv(如果您之前没有安装,已安装可跳过)
curl -LsSf https://astral.sh/uv/install.sh | sh
使用 Python 3.10 创建虚拟环境,并安装包:
uv venv --python 3.10 --system-site-packages
source .venv/bin/activate
安装 MeshCat numpy
uv pip install meshcat
uv pip install "numpy<2"
构建目录 + 配置 + 编译
mkdir -p build && cd build
cmake ..
make
运行程序
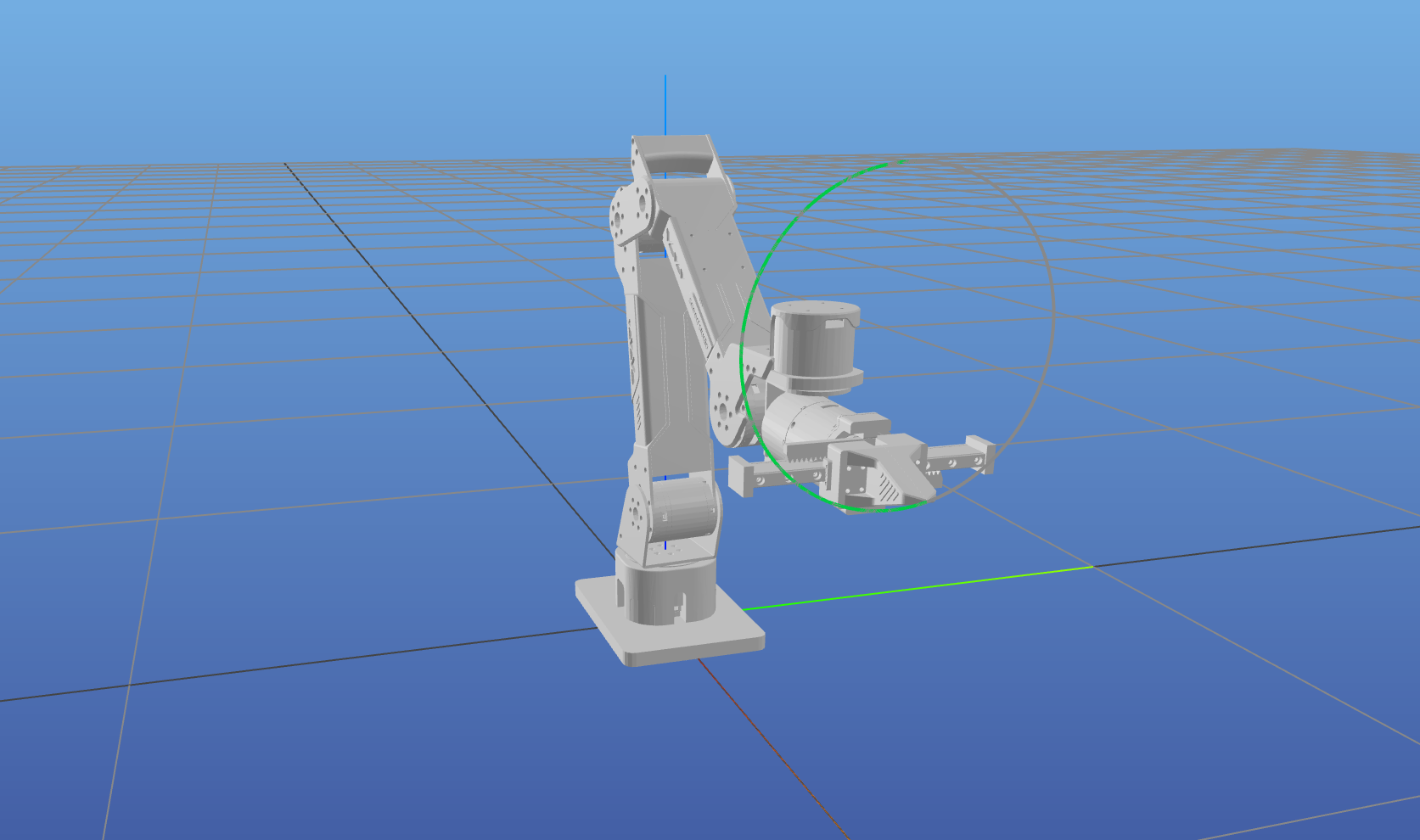
仿真机械臂末端画圆进行
./traj_sim_circle
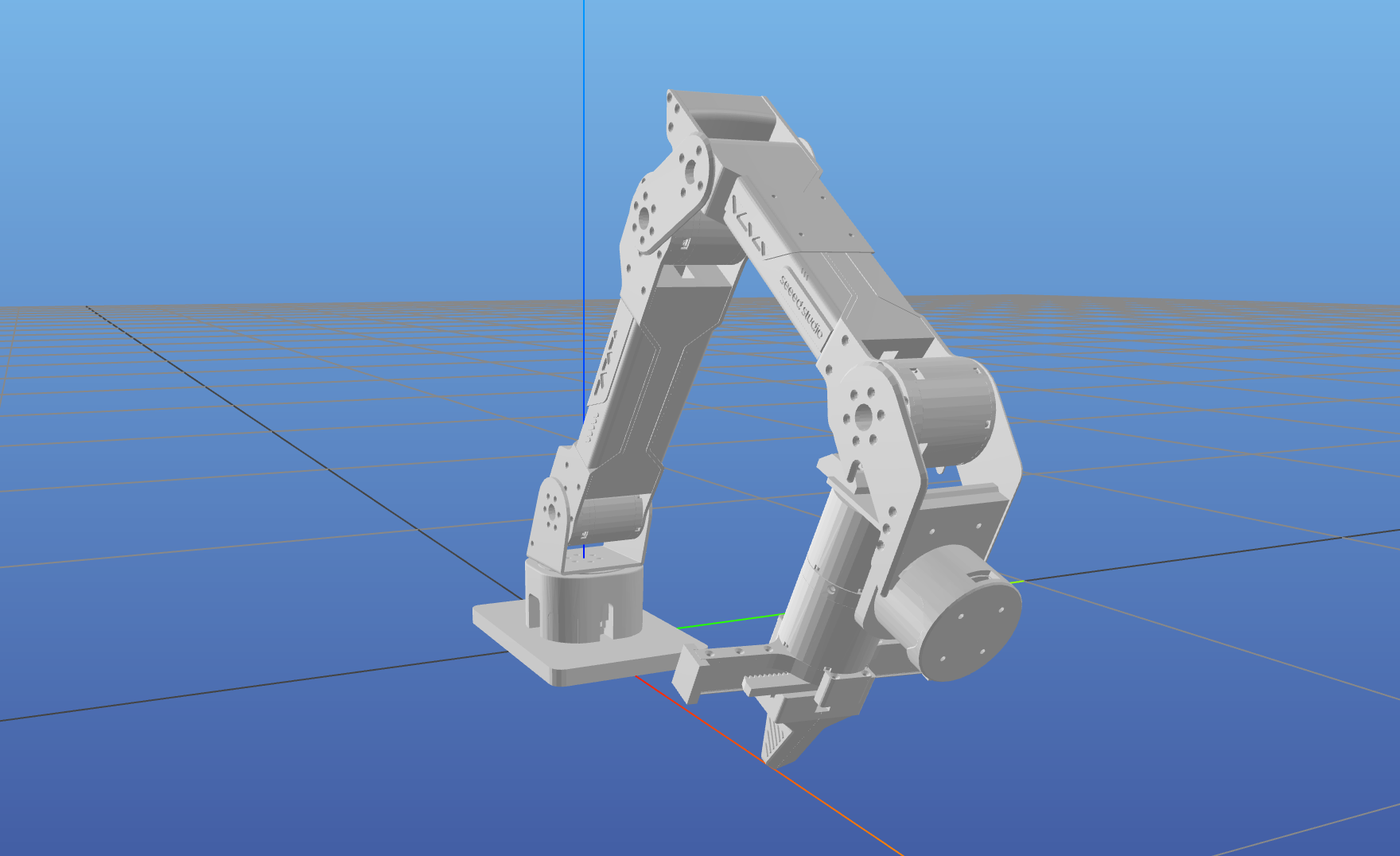
仿真机械臂末端沿圆锥形轨迹运动
./traj_sim_cone
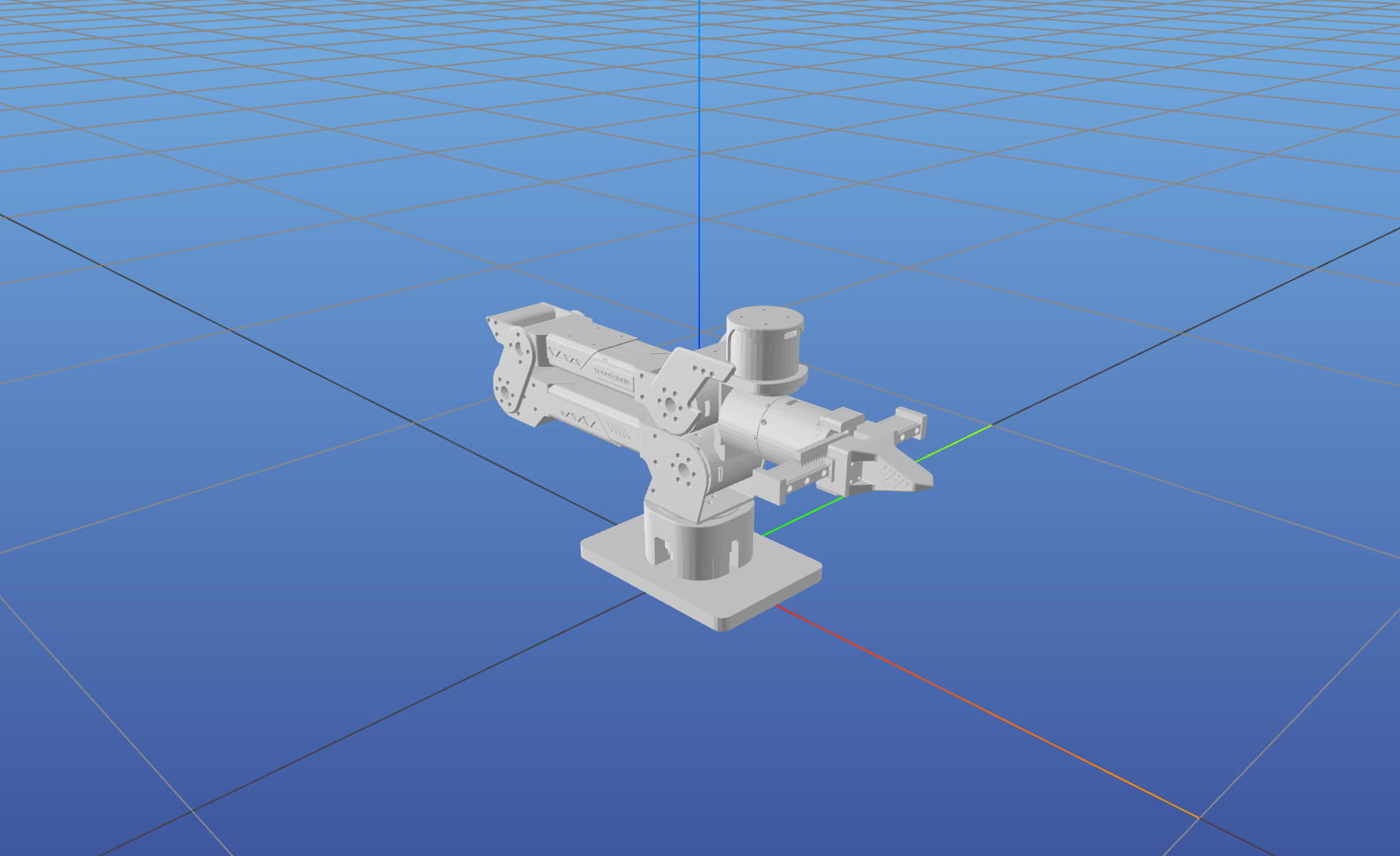
在终端交互式输入目标位置
./traj_sim_geodesic