reBot Arm B601 × NVIDIA Jetson 入门指南
介绍
面向物理 AI 新时代的一体化具身智能开发平台。 随着生成式 AI 从简单的“理解世界”发展到主动“与世界交互”,机器人开发正迈入一个全新的时代:物理 AI。 为了帮助开发者、研究人员和教育工作者加速踏入具身智能领域,Seeed Studio 将完全开源的 reBot Arm B601 与前沿的 NVIDIA Jetson 开发套件相结合,打造出一款强大的下一代机器人开发套装。
该套装不仅提供高精度的机器人操作能力,还具备运行多模态 AI 模型、视觉语言模型(VLM)以及在边缘本地进行实时机器人推理所需的强大 AI 计算能力。 它是一个完整的平台,可用于构建新一代智能机器人——从学习与研究到快速原型开发与部署。
| reBot Arm B601 DM | reBot Arm B601 RS |
|---|---|
 |  |
| NVIDIA® Jetson AGX Thor™ Developer Kit | reComputer Classic J3011 |
 |  |
danger
在这里,我们以 NVIDIA Jetson Thor 为例,演示如何使用 Jetson 快速控制 reBot Arm B601 机械臂。你也可以根据自己的具体需求选择其他 Jetson 设备。
为什么选择这个套装?
一个完整的具身智能开发平台
传统的机器人开发通常存在以下几个限制:
- 封闭的硬件生态
- 不足的 AI 计算能力
- 支离破碎的软件栈
- 较高的开发门槛
- 难以验证真实世界的物理 AI 场景
reBot Arm × Jetson 套装正是为了解决这些挑战而设计的。
通过这个套装,你将获得:
- 一个完全开源的 6+1 自由度机械臂平台
- 由 GPU 提供算力的 NVIDIA 旗舰边缘 AI 计算平台
- 对 ROS1、ROS2、Isaac Sim 和 LeRobot 的原生支持
- 对多模态 AI 和生成式 AI 工作流的即开即用支持
- 一个统一的环境,用于教育、研究和 AI 机器人原型开发
入门指南
硬件连接
- 参考本指南组装机械臂。
- 使用 USB 转 CAN 适配器,通过 Type-C 接口将机械臂连接到 NVIDIA Jetson。
一键安装机械臂驱动
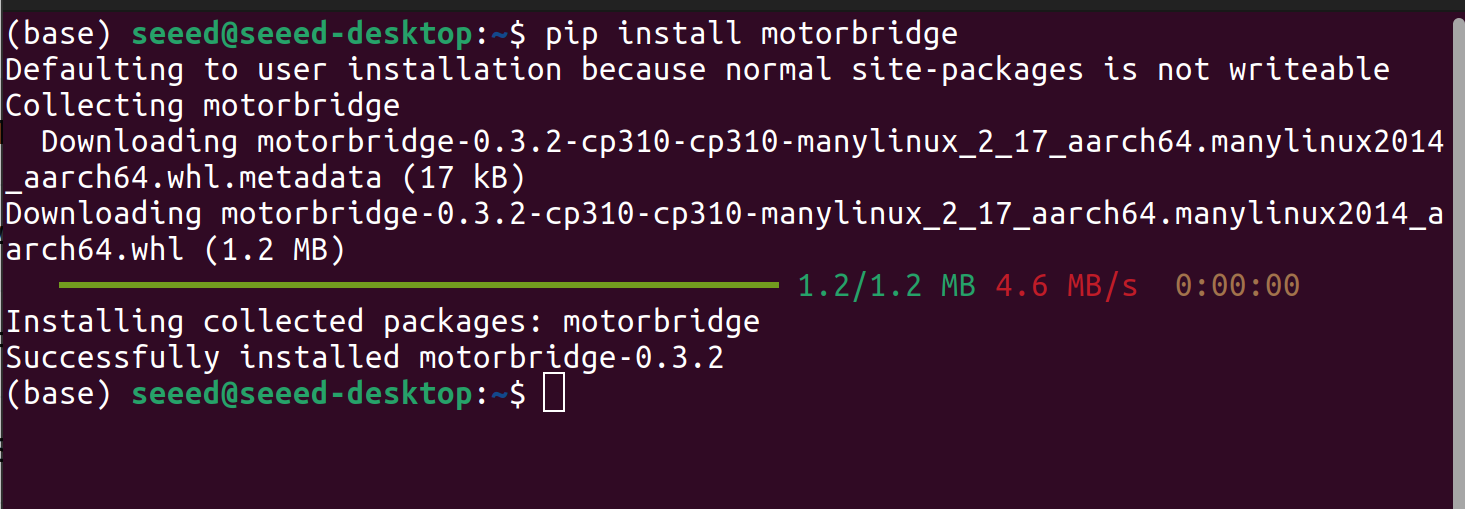
在 Jetson 上打开终端窗口并运行以下命令。
uv pip install motorbridge
WebUI
在 Nvidia Jetson 上运行以下命令:
motorbridge-gateway --bind 127.0.0.1:9002 --vendor damiao --transport dm-serial --serial-port /dev/ttyACM0 --serial-baud 921600 --dt-ms 20
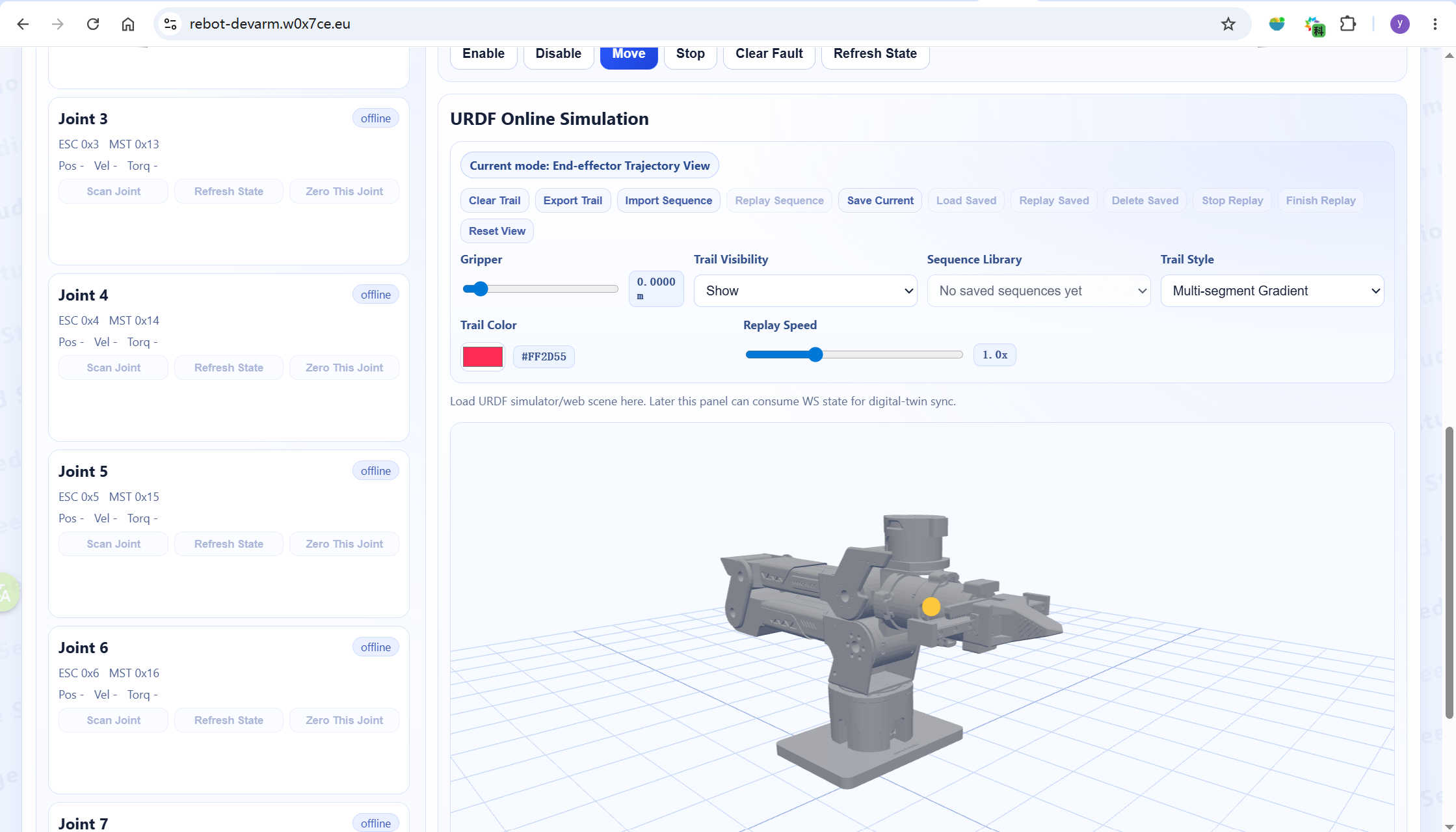
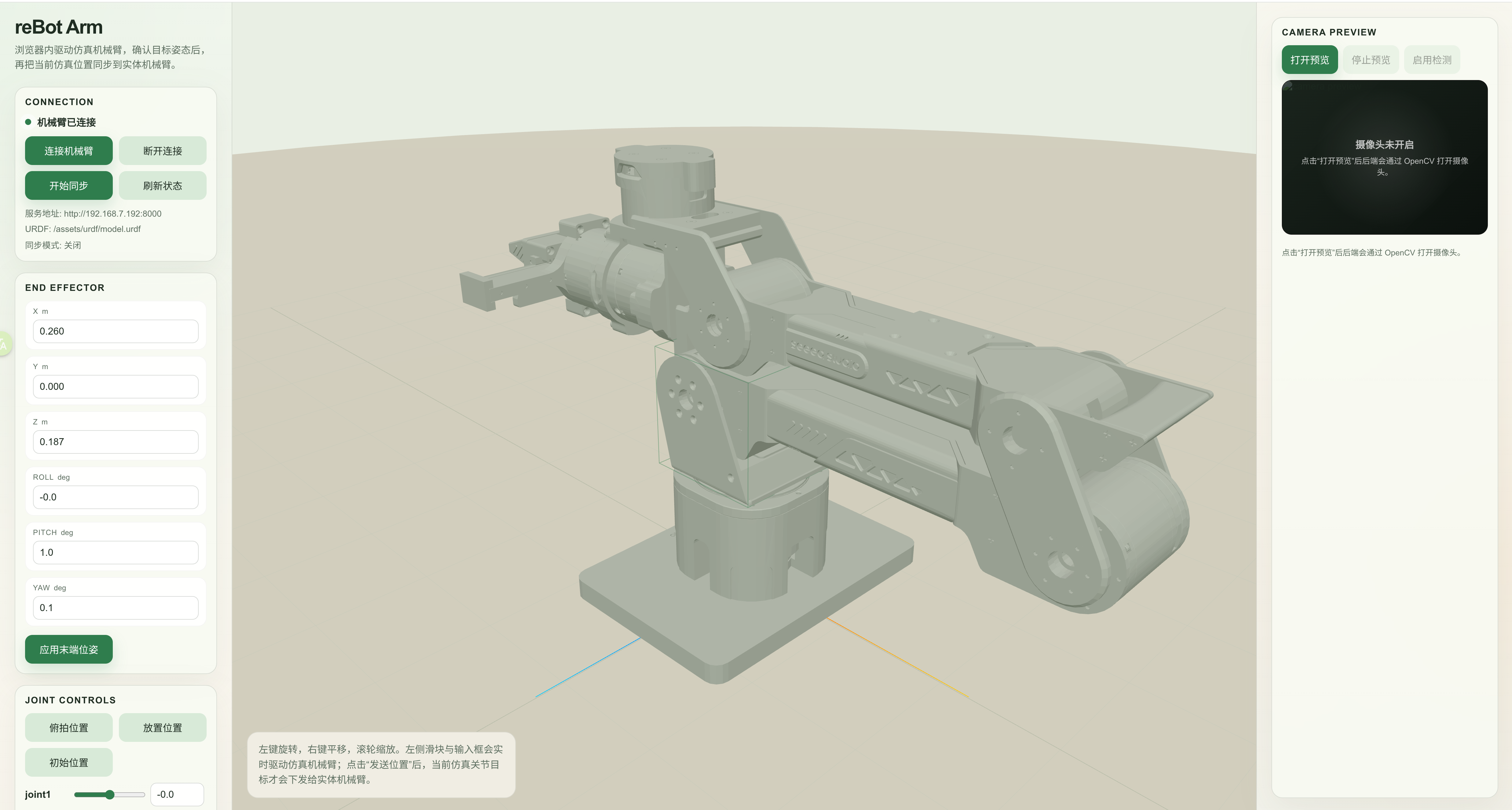
然后,在浏览器中打开 https://motorbridge.github.io/motorbridge-studio/,你将看到如下页面。通过该界面,你可以调整电机参数、查看机械臂状态以及执行其他操作。
应用

技术支持与产品讨论
感谢您选择我们的产品!我们将为您提供多种支持,确保您在使用我们产品的过程中尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。