reBot Arm B601-DM 快速入门

![]()
![]()
![]()
![]()
6-DOF Robotic Arm · Multi-Motor Support · Kinematics Solver · Trajectory Planning · Fully Open Source
reBot Arm项目已经在github上开源了,本文将带领你快速入门B601-DM,从组装到使用。 本文的内容正在光速赶来,各位敬请期待。
如果你购入的是已组装的成品套件,请直接跳到文章末尾 第三步 的教程视频,按照视频教程使用,无需给电机写入ID和校准零位
已验证虚拟机的性能不足以支撑 demo 运行且存在配置问题,建议优先使用 ubuntu 物理机来控制机械臂
购买选项
reBot Arm B601-DM 提供多种配置选项,以满足不同用户的需求。
选项对比
| 配置 | 本体 | 夹爪 | 电机 | 结构件 | 购买链接 |
|---|---|---|---|---|---|
| 完整套装 | ✅ | ✅ | ✅ | ✅ | |
| 仅夹爪 | ❌ | ✅ | ❌ | ❌ | |
| 仅本体 (结构) | ✅ | ❌ | ❌ | ✅ | |
| 仅本体 (电机) | ✅ | ❌ | ✅ | ❌ |
风险告知及免责声明
关于电源
- 机械臂在发货时并未配备电源/默认情况下不带电源。您可自行连接电池,或选购一款我们开源的24V 14.6A MeanWell电源电源适配器, 或者在京东购买,切勿使用杂牌和不安全的渠道购买电源,造成风险后果均由个人承担。 如果你的家庭电压是220V,请把电源侧面拨码调至230V,如果你的家庭电压是110V,请把你电源的拨码调至115V。
| 220V | 110V |
|---|---|
 |  |

- 选择我们开源的24V14.6AMeanWell电源外壳进行自组装,文字步骤和BOM在github仓库中开源(只推荐有过相关电源组装经验的开发者使用) 组装参考视频:
第一步:组装机械臂
-
开始组装前,请您务必仔细阅读以下内容。为确保您顺利完成组装并获得完整的动手体验,组装过程中请保持耐心与专注,并时刻遵循以下要点:
- 本套件包含大量螺丝与结构件,部分零件外观相近。组装时请耐心核对螺丝规格与零件型号,确认安装方向无误后再进行固定。
- 视频为四月初拍摄,后续或许会有零件微调和改动,但是不影响跟随本视频的安装效果,最终零件以出货为准。
- 为方便大家拧螺丝和取下螺丝,开源BOM中所选用的是普通螺丝,但是正式出货螺丝涂了防松胶,您也可使用自备的顺手工具或电动螺丝刀(强烈推荐准备好电动螺丝刀)。若使用电动工具,务必将扭力调至中低档(3~6kgf.cm),避免扭力过大导致螺丝滑丝,造成部件无法取下的不可逆损失。有任何滑丝的可能就立刻更换螺丝或者对准后重新拧,防松螺丝滑丝无法用滑丝取出器取出,会报废整个零件。所以务必小心谨慎。
- 组装过程中请务必注意安全,防止夹手、砸伤,儿童请在家长或监护人陪同下完成该项目。
tip提醒:组装视频中5号电机和6号电机之间的 D4 * 7 不需要进行安装,是视频介绍错误,如果您购买的是散件版本的 reBot Arm B601-DM ,7颗 D4 * 7 足够您来完成组装
第二步:写入电机ID及零点
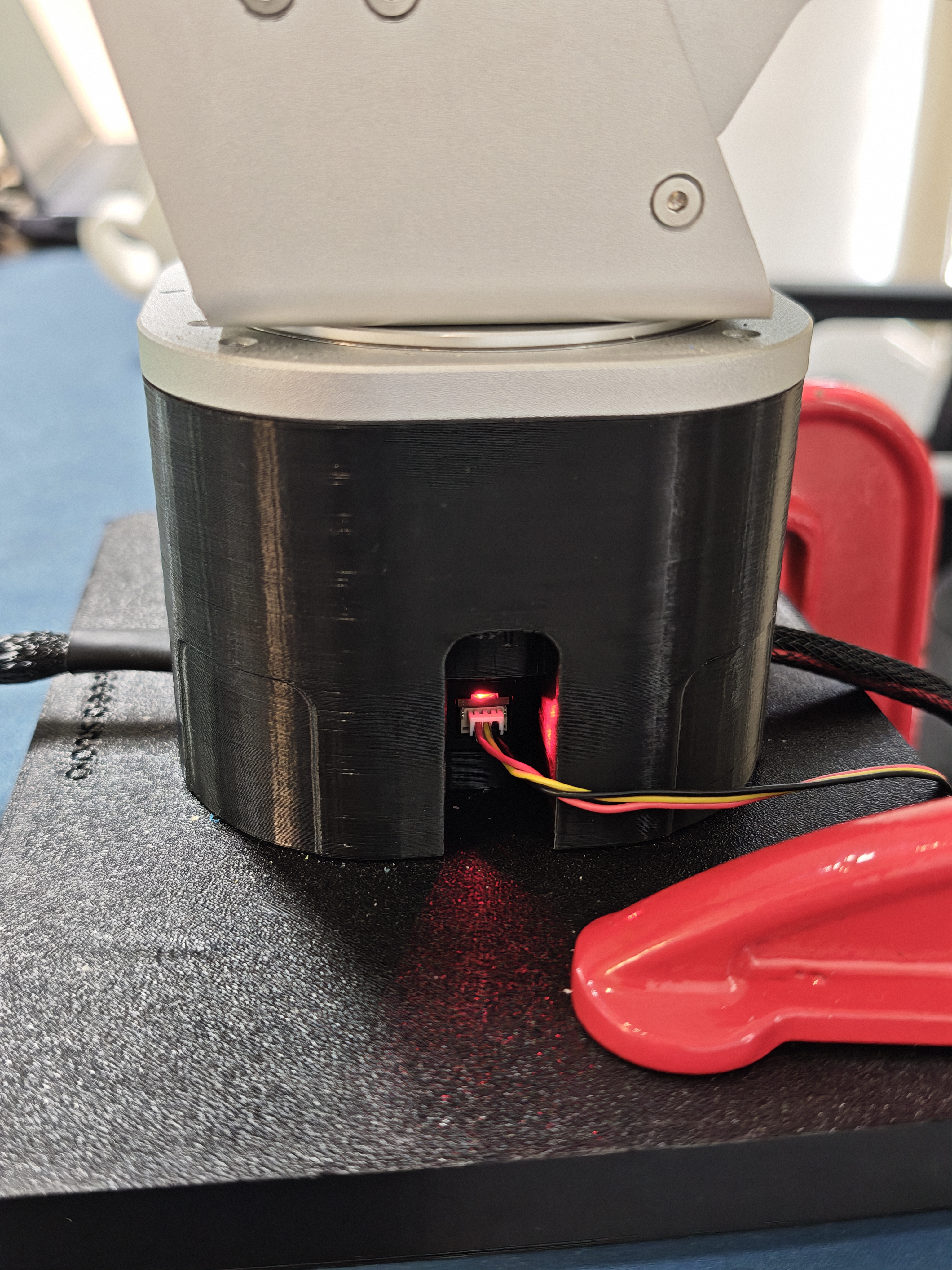
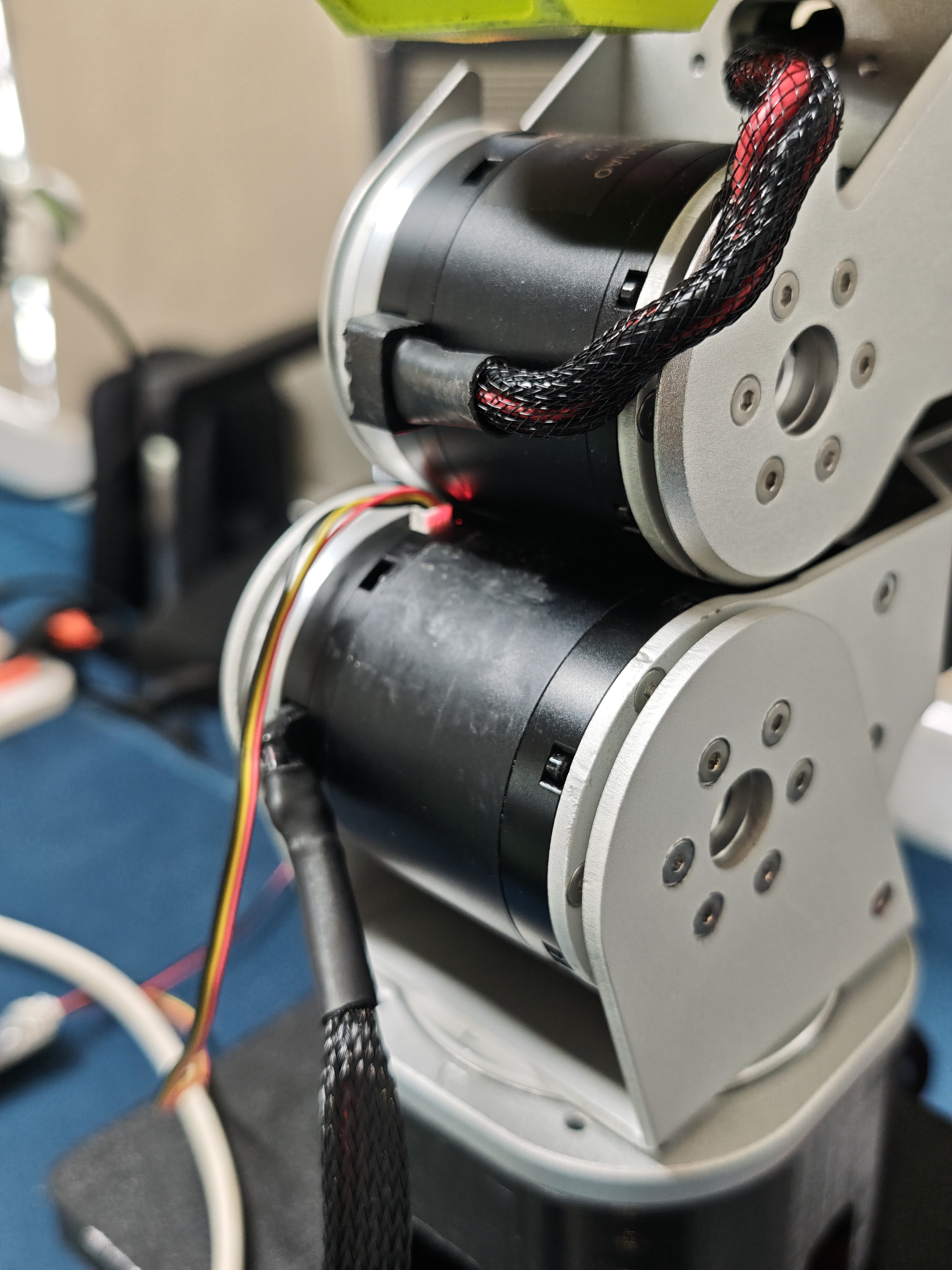
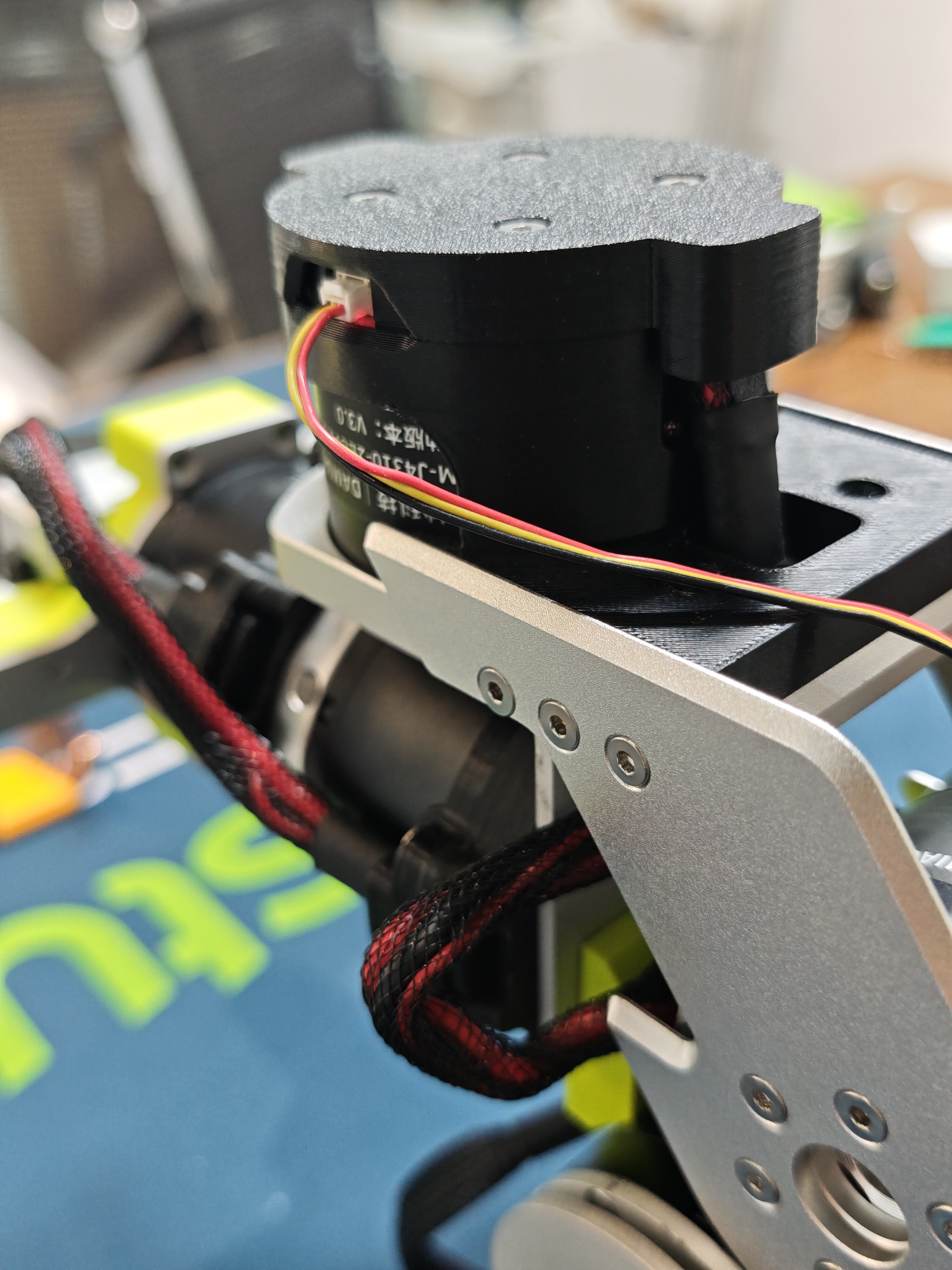
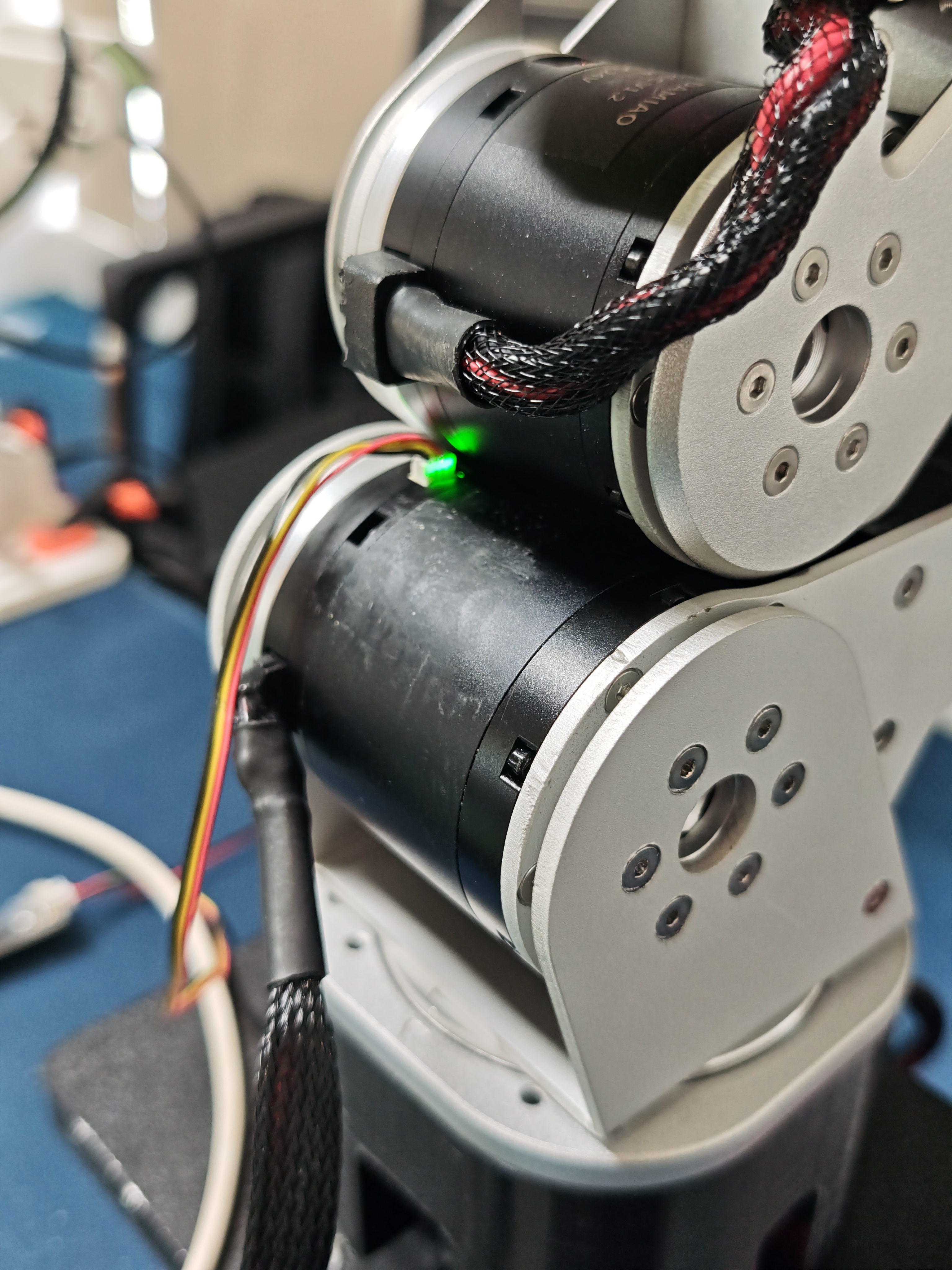
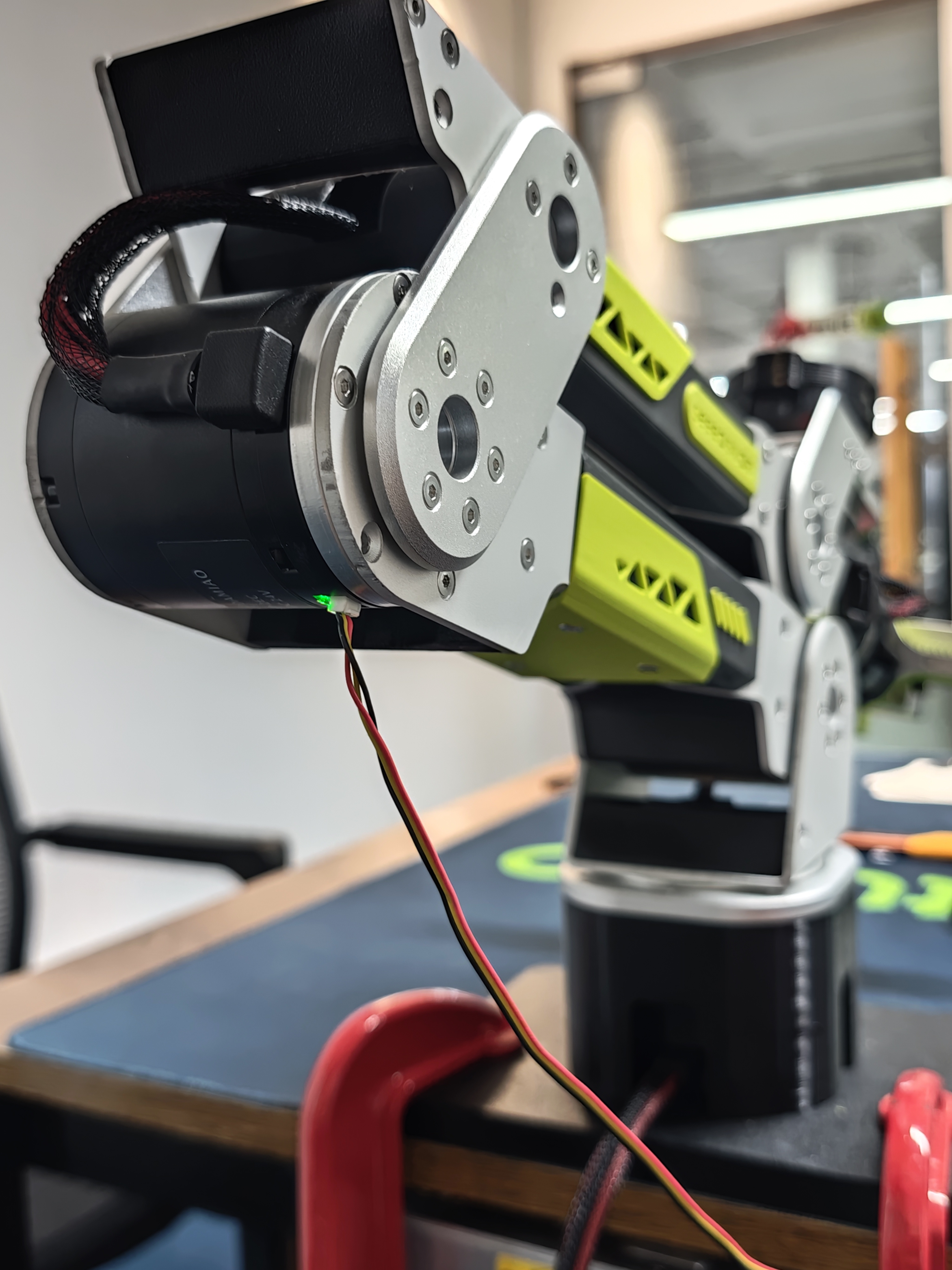
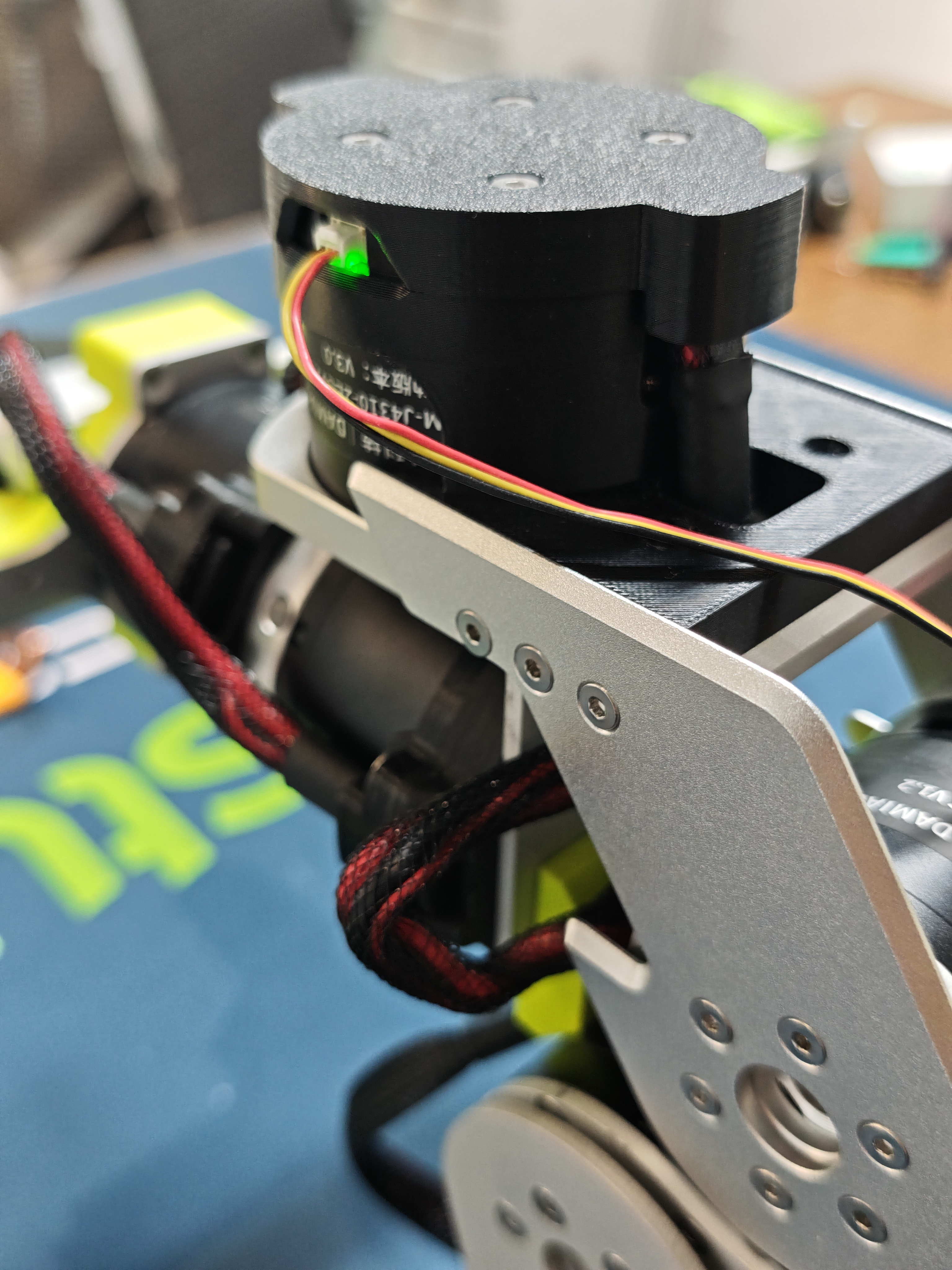
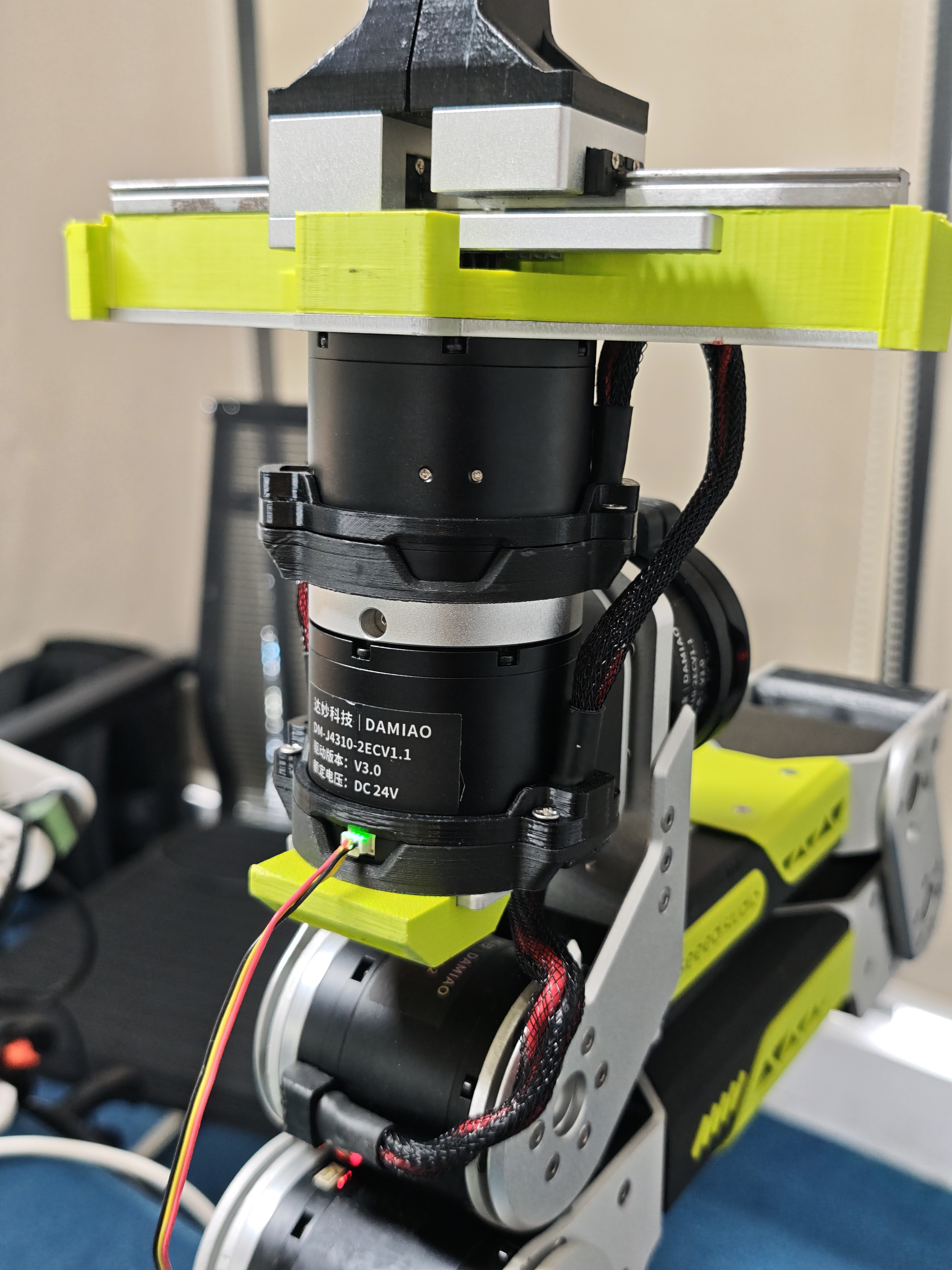
组装机械臂时,请不要忘记连接电机1到2之间的这根线束,具体位置如下图高亮处所示。接线时,请务必先让当前电机失能并断开电源,避免热插拔或误操作导致电机参数异常。

AI AGNET
该部分内容处于测试阶段,请在使用过程中注意安全操作,并且AI如果给出的提示与本文内容不符,请以本文为准,并向我们的工程师取得帮助
尝试让AI AGENT来协助你完成这一过程,将下方提示词复制给你的 AI 助手
请参考 AGENTS.md(https://github.com/Welt-liu/reBot-B601-RS-Skills/blob/main/zh/AGENTS.md)中的流程,帮助用户完成新机械臂的初始化。
电机复位前须知
在进行电机参数配置前,请留意以下准备事项与安全规范:
- 自备2个工装夹具(尺寸≥3英寸)以及一台24V 15A、XT30输出开关电源(请选用正规品牌产品,严禁使用劣质电源)。
- 调试与操作过程中,请保持至少1米安全距离。
- 禁止电机热插拔;插拔XT30 2+2接口前必须断开电源。
- 禁止电机超载、超速运行;设备启动前检查线路接线与紧固件;请勿在潮湿、高温、多尘环境下使用。
- 需设置合理的程序参数与急停功能,防止设备失控。
- 请严格遵守以上规范。因违规操作、人为失误造成的一切风险与损失,卖家不承担任何责任。
准备清单
硬件设备
- reBot Arm B601 DM 机械臂 × 1
- USB-CAN 转接板 × 1
- 信号电源隔离板 × 1
- 木工夹具 × 2
- USB-C 数据线 × 1
- 24V 15A 电源(XT30 输出)× 1
- 美规电源线 \ 欧规电源线
电脑配置要求
- 双系统个人电脑(Windows + Ubuntu / macOS)
所需软件
写入电机ID并测试使能
按照表格中的参数设置各关节电机对应的 CAN ID 与 Master ID
| 电机编号 | CAN ID | Master ID |
|---|---|---|
| 1号电机 | 0x01 | 0x11 |
| 2号电机 | 0x02 | 0x12 |
| 3号电机 | 0x03 | 0x13 |
| 4号电机 | 0x04 | 0x14 |
| 5号电机 | 0x05 | 0x15 |
| 6号电机 | 0x06 | 0x16 |
| 7号电机 | 0x07 | 0x17 |
下面以1号电机作为操作示例,注意各关节电机的 CAN ID 与 Master ID 一定要根据上面的表格设置正确参数
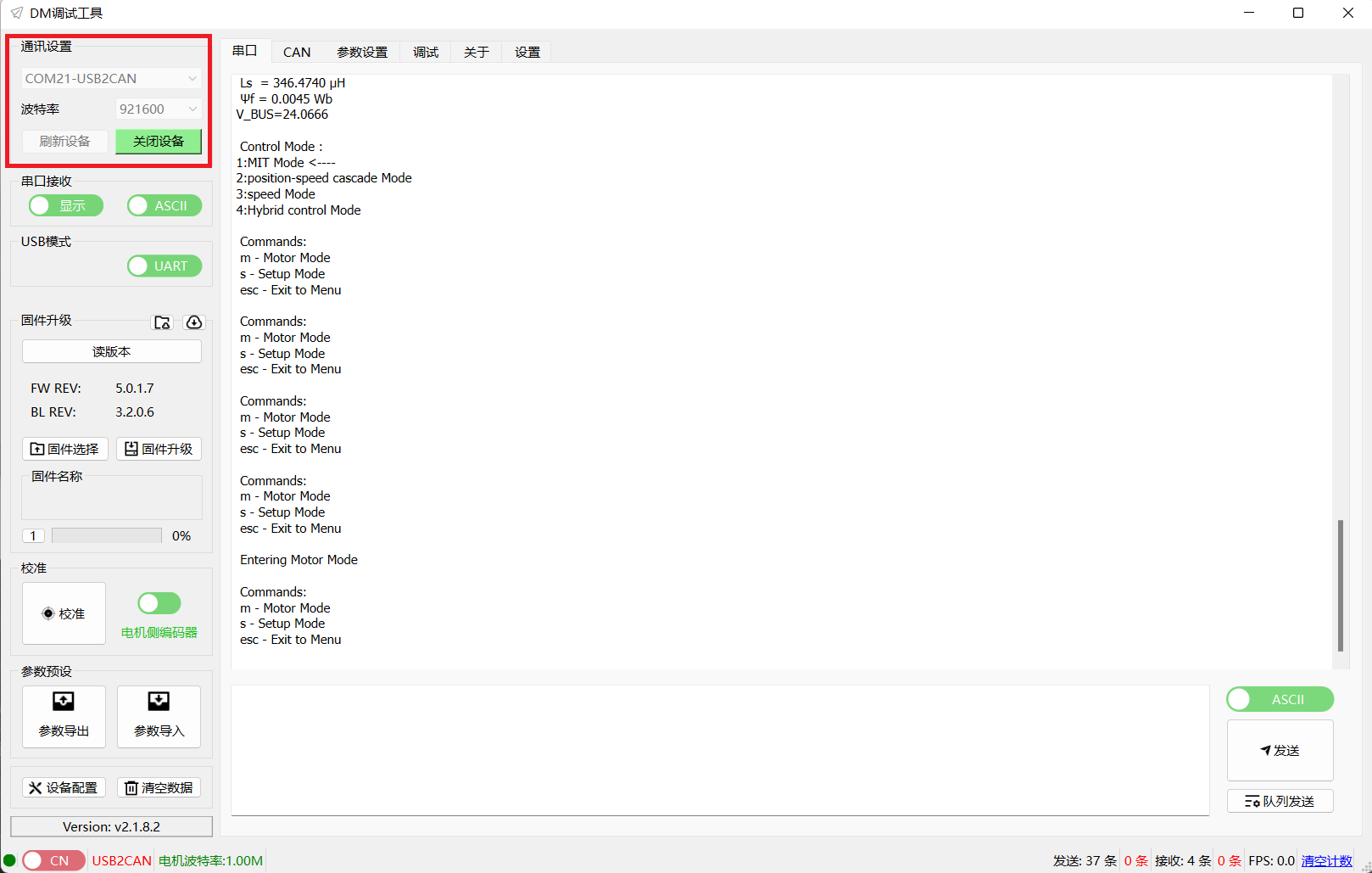
1、打开 DM_Tools 上位机软件,选择 USB 对应的 COM 串口号,波特率设置为 921600 ,连接成功后 串口 界面会有信息打印。
2、使用 3pin 线将 1 号电机与 USB-CAN 转接板连接
3、连接完成后进入 参数设置界面 ,点击 读参数 将 CAN ID 设置为 0x01 ,Master ID 设置为 0x11
4、设置完成后点击 写参数 完成参数写入
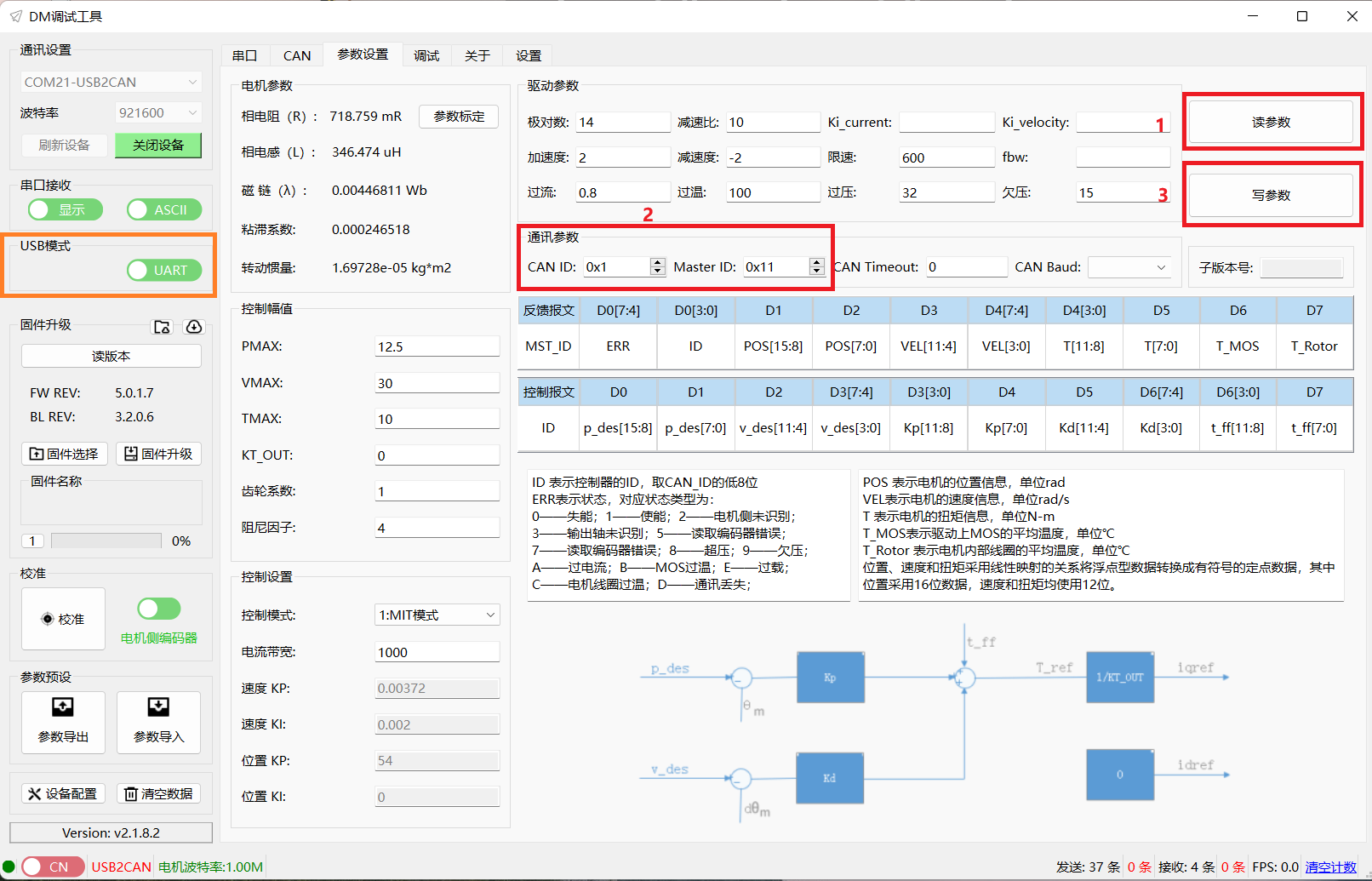
左侧橙色框中的USB模式代表了当前参数设置页面读写电机参数时使用的方式
5、进入到 调试 界面确保 CAN ID 与 Master ID 设置无误后点击 电机使能 ,此时电机指示灯绿灯常亮进入使能状态,1号电机测试完成。
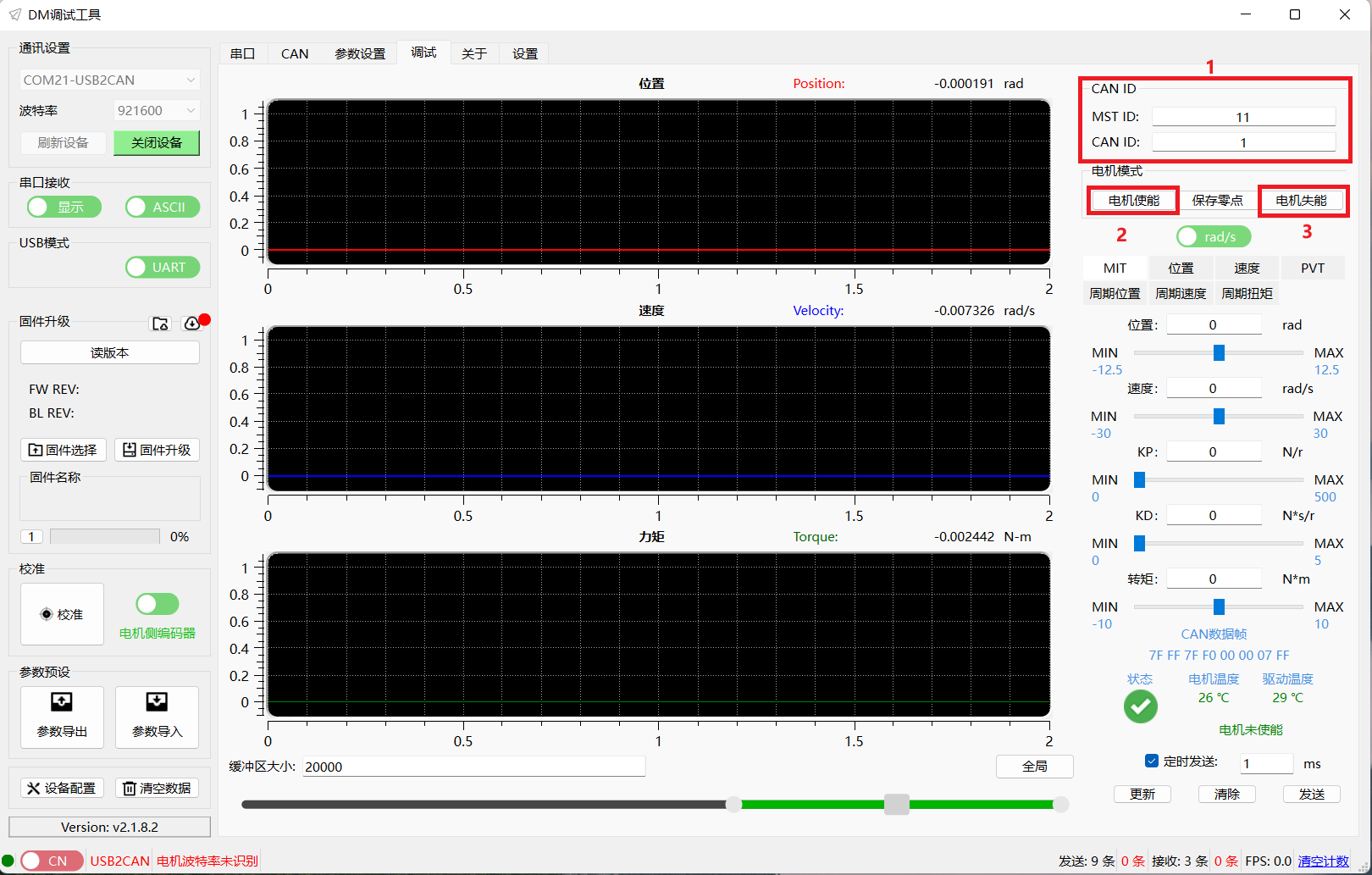
测试完成后注意点击 电机失能 退出使能状态。
各电机编号时 3pin 线连接位置与使能效果
| 1号电机接线图 | 2号电机接线图 | 3号电机接线图 | 4号电机接线图 | 5号电机接线图 | 6号电机接线图 | 7号电机接线图 |
|---|---|---|---|---|---|---|
 |  |  | 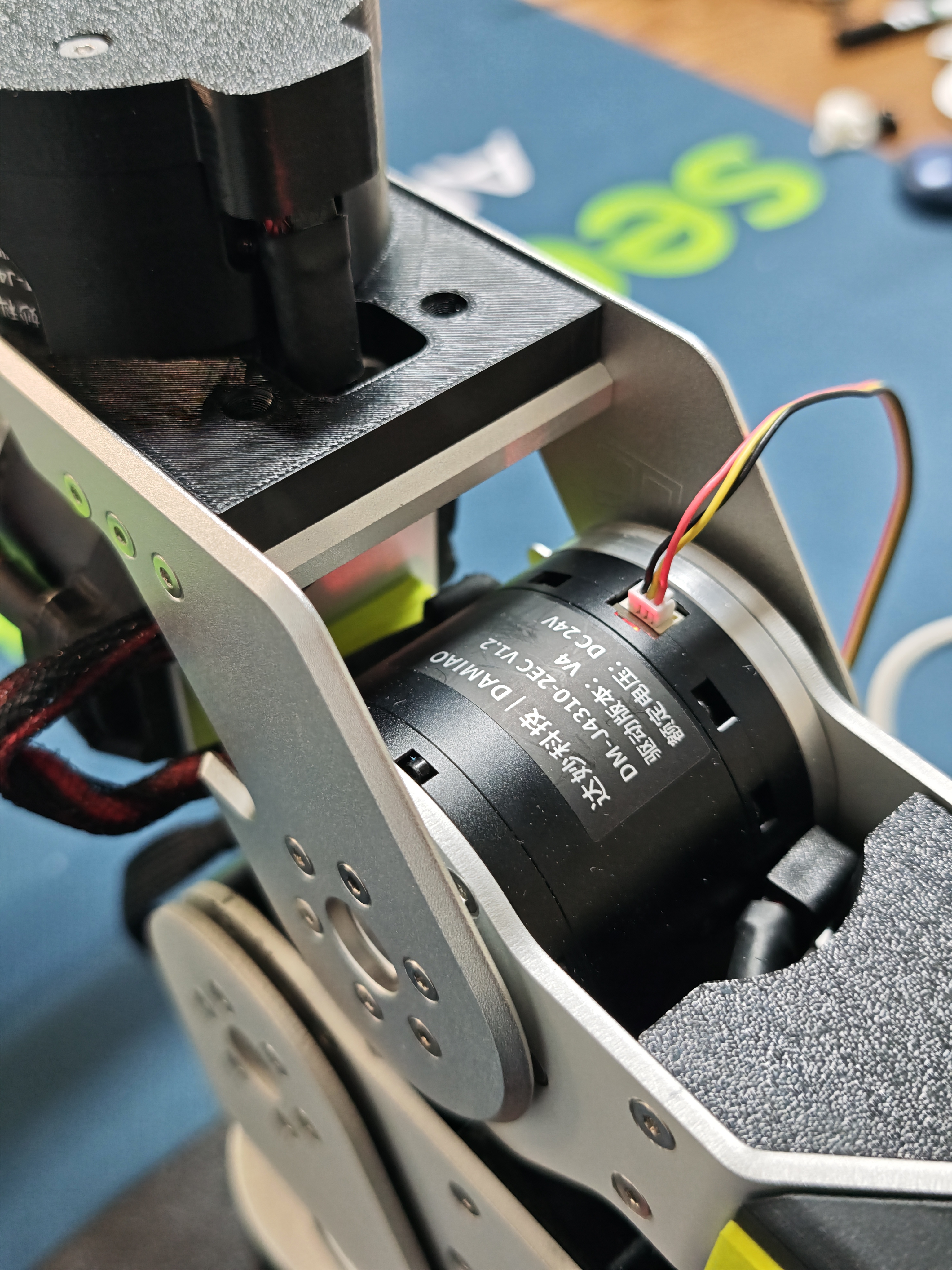 |  |  |  |
| 1号电机使能效果 | 2号电机使能效果 | 3号电机使能效果 | 4号电机使能效果 | 5号电机使能效果 | 6号电机使能效果 | 7号电机使能效果 |
|---|---|---|---|---|---|---|
 |  |  |  |  |  |  |
第三步:校准机械臂及上手初体验
相信你已经跟随视频完成了机械臂组装、零点初始化、电机ID配置等全部前期准备工作。现在你可以正式开始体验我们提供的一系列教程与工具。
使用请参考视频和文字教程,在控制机械臂运动之前,需要重新设置一次零点。
-
探索我们的 MotorBridge 平台。该平台为一站式综合解决方案,支持电机种类持续扩充,涵盖达妙电机、Robstride电机、高擎电机、脉塔电机、Hexfellow 等多款电机,同时兼容 reBot 等持续更新迭代的机械臂产品。平台面向入门用户友好易用,同时也为开发者提供功能完全一致的 Python SDK。
-
体验专为 reBot 机械臂适配的 MotorBridge 全新功能与细节,包含一键零点校准、参数写入、界面拖拽式电机控制,以及内置模型可视化界面。
-
本工具全面兼容 Windows、Ubuntu、macOS 操作系统。
步骤 1:安装 Miniforge(支持 Windows\Ubuntu\macOS\Jetson\树莓派)
1.安装miniforge,创建虚拟环境,避免其他环境包的干扰导致demo运行失败。
Ubuntu\Jetson\树莓派:
wget "https://github.com/conda-forge/miniforge/releases/latest/download/Miniforge3-$(uname)-$(uname -m).sh"
bash Miniforge3-$(uname)-$(uname -m).sh
or macOS:
curl -L -O "https://github.com/conda-forge/miniforge/releases/latest/download/Miniforge3-MacOSX-$(uname -m).sh"
bash Miniforge3-MacOSX-$(uname -m).sh
or windows:
在浏览器中打开 Miniforge 的 Release 页面,找到最新版本的 Miniforge3-Windows-x86_64.exe 点击下载:
https://github.com/conda-forge/miniforge/releases
步骤 2:环境配置
创建 Python 3.12 版本虚拟环境:
conda create -y -n rebot python=3.12
随后激活虚拟环境。每次打开终端使用 reBot 相关功能时,都需要重新执行该激活命令:
conda activate rebot
步骤 3:安装 motorbridge
提示 macOS 用户注意: 如果您在 macOS 上遥操时帧率偏低,可能是沁恒(WCH)CH34x 驱动版本过旧导致。对于 macOS 10.14 及以上版本,系统已内置 AppleUSBCHC0M 驱动,您可以先卸载旧版驱动,改用 macOS 内置驱动,通常能有效提升帧率。
激活 reBot 虚拟环境后,执行以下命令安装 motorbridge:
pip install motorbridge
步骤 4:连接机械臂
使用 USB 数据线将机械臂连接至电脑并接通电源后,需要为串口配置 666 权限。(Windows系统不需要配置权限,跳过此步骤即可)
sudo chmod 666 /dev/ttyACM*
步骤 5:启动 MotorBridge
在浏览器中打开地址 https://motorbridge.github.io/motorbridge-studio/,点击帮助选项,根据你的操作系统与所用驱动板复制对应指令,核对 IP 地址与端口号后,在终端中按下回车运行。
以 Windows 系统为例:
motorbridge-gateway -- --bind 127.0.0.1:9002 --vendor damiao --transport dm-serial --serial-port COM3 --serial-baud 921600 --model 4340P --motor-id 0x01 --feedback-id 0x11 --dt-ms 20

常见问题
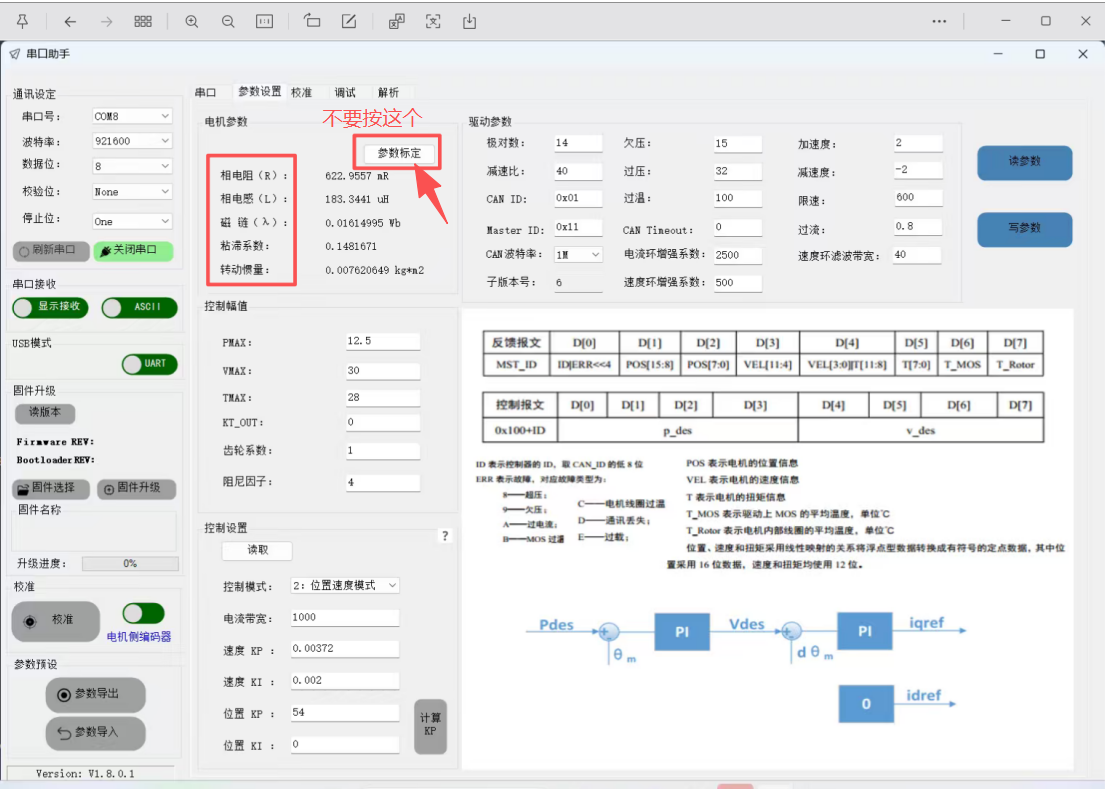
- 电机一启动就有很大声的异响?
- 可能是在写入ID的过程中不小心点了参数标定,这会导致电机原本出厂的转动惯量等参数被破坏。你可以用DM_Tools_v.1.8.0.1.exe(仅支持 Windows 系统)上位机将同型号正常的电机参数导出,然后再导入到异常的电机后,修改相应的CANID,点击写入参数后继续执行零点校准的流程。
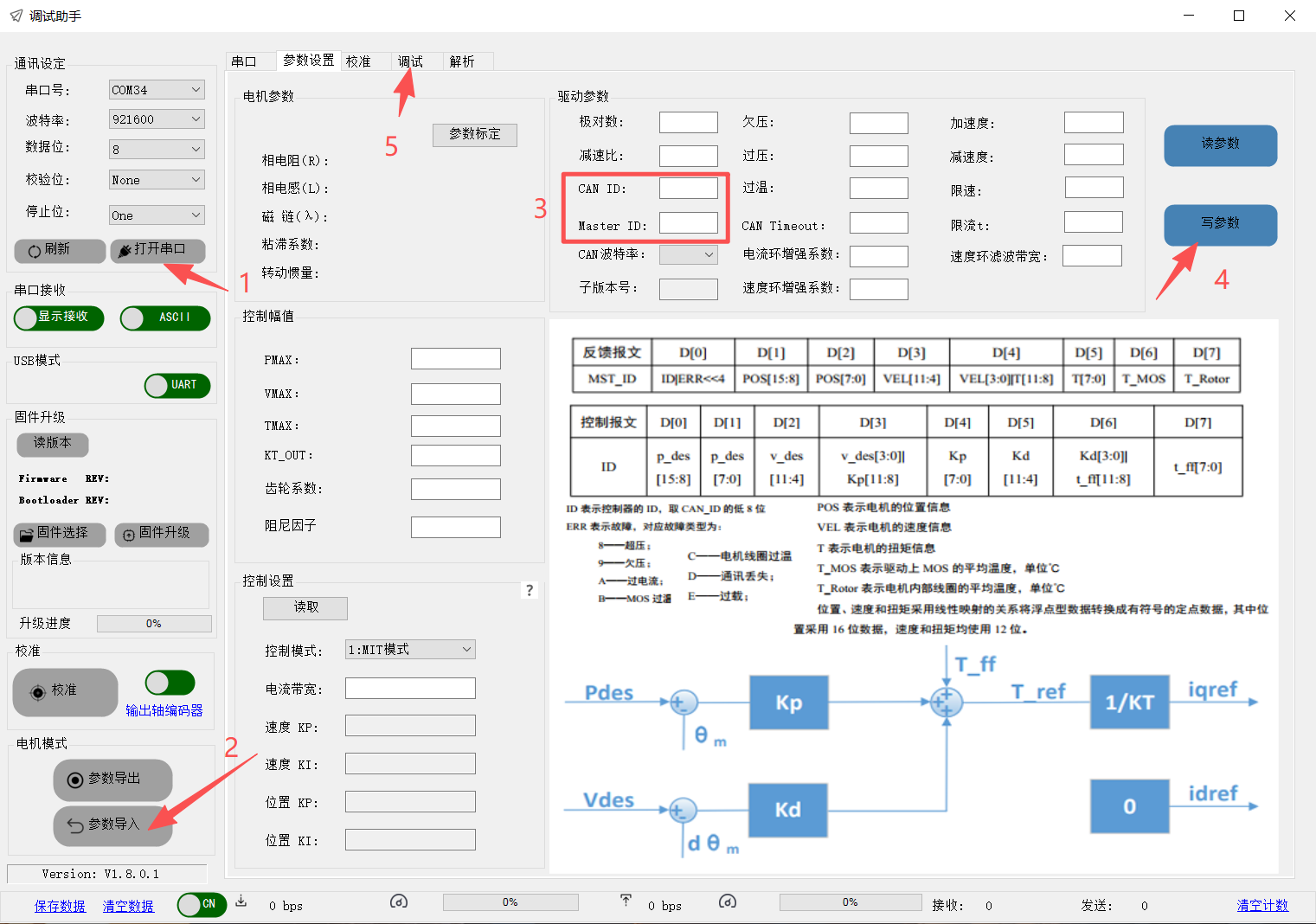
- 电机所有CANID变成了一样?
- 在用DM_Tools_v.1.8.0.1.exe(仅支持 Windows 系统)校准零点的时候千完别点CANID旁边的读取和设置两个按钮,调试的页面是通过CAN通讯链路完成的,如果点了设置,会把CANBUS上所有的电机设置成同一个CAN