reCamera Gimbal 入门指南

介绍
欢迎使用 reCamera Gimbal!reCamera gimbal 2002 系列是首款开源相机控制系统,由一个微型 AI 相机 - reCamera 2002w 8GB/64GB 和一个兼容的 2 轴云台底座(配备 2 个无刷电机)组成。它由 RISC-V SoC 驱动,提供 1 TOPS AI 性能,支持 5MP @ 30 FPS 视频编码。它提供乐高式自组装包装,集成了 Sensecraft AI 平台和 Node-RED 平台,用于流畅的图形化编程和管道构建,能够快速自训练、模型转换和部署 AI 模型,如 Yolo v5/v8/11。
本指南将帮助您快速设置设备并开始使用它来解锁强大的 AI 视觉功能。无论您是初学者还是经验丰富的用户,这个分步演练都将指导您完成安装、配置和首次使用。
先决条件
- reCamera Gimbal
- 用户手册(包装盒内)
- 12V DC 电源适配器转 5521 DC 插头(购买链接)
- USB Type C(购买链接)
- Wi-Fi 连接
- 电动螺丝刀(可选,用于更好的组装体验)
开箱
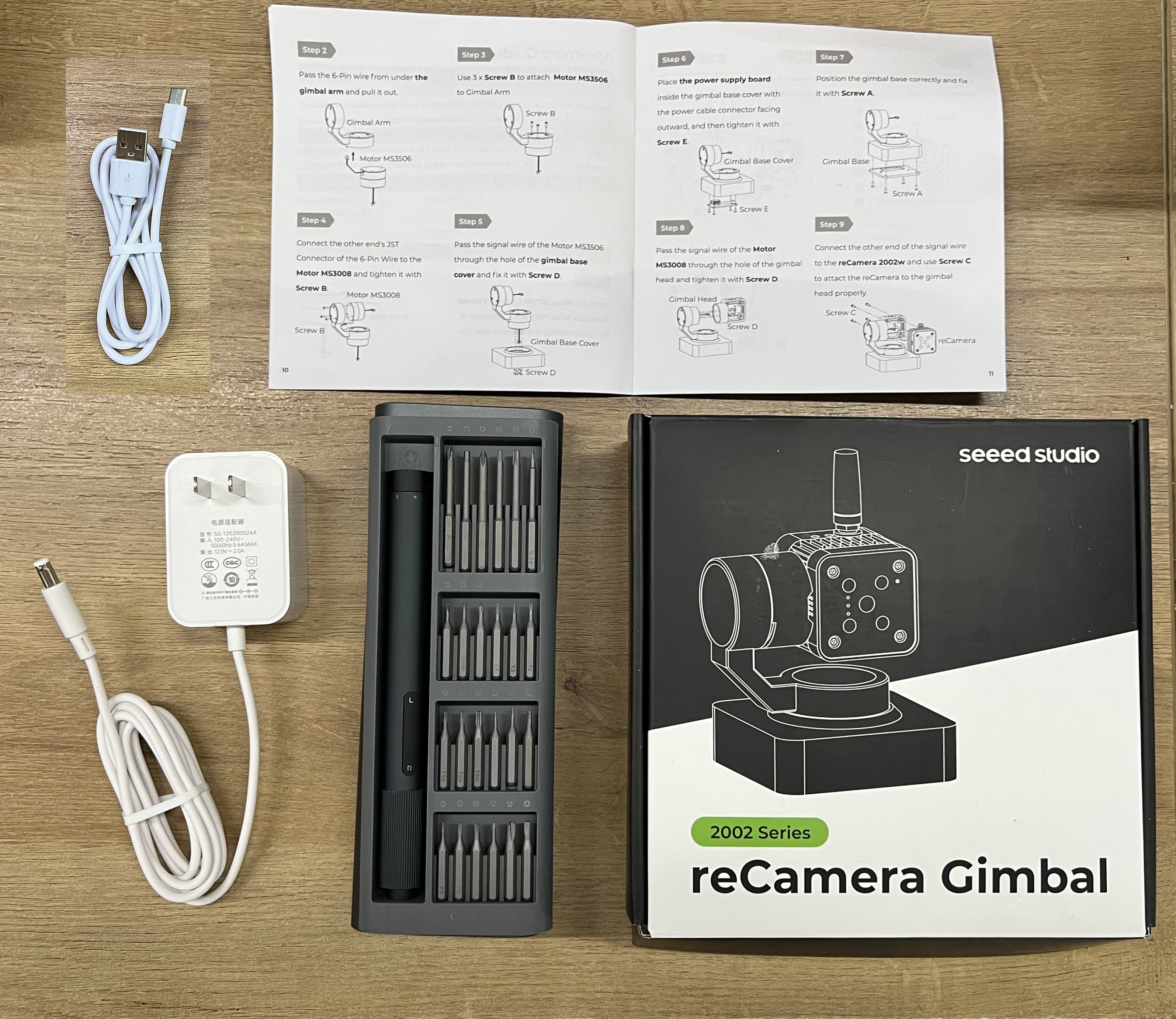
首先拆开您的 reCamera Gimbal 包装。包装盒内应包含:
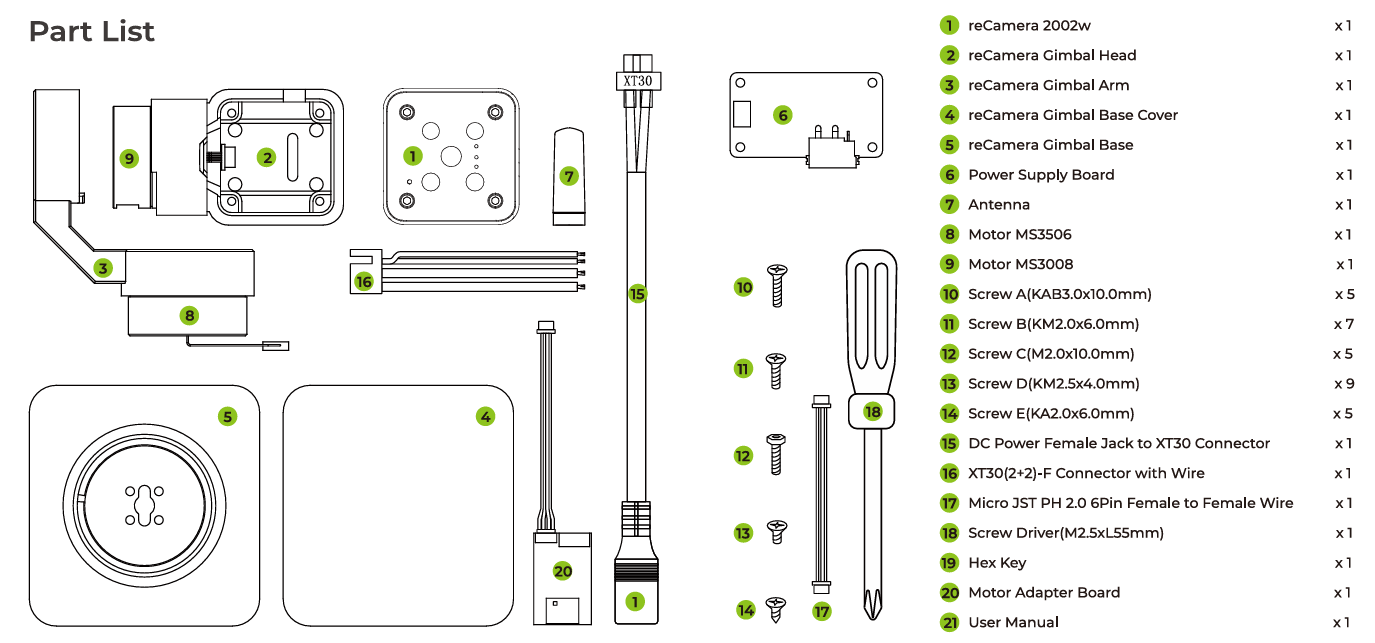
确保所有部件都已包含。
硬件组装
根据包装盒上的组装说明或用户手册组装 reCamera Gimbal。
请确保所有螺丝都已拧紧,否则会影响电机的运行。
设置设备并登录
步骤1: 组装云台后,将 USB 线从 reCamera Gimbal 连接到您的 PC。在网站上导航到 192.168.42.1 并更改默认密码。如果您使用的是 WiFi AP 设置模式,请导航到 192.168.16.1
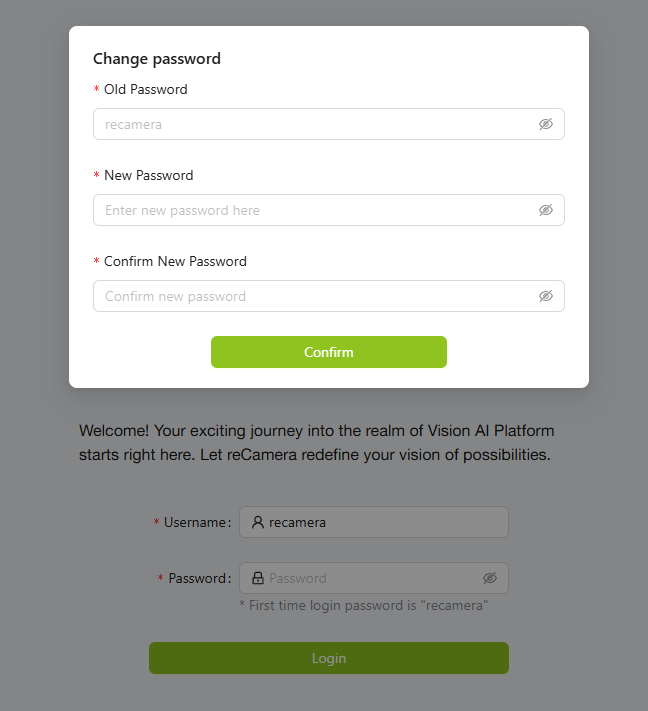
请记住您的密码,否则所有日志将被清除以重置您的设备。如果您忘记密码,请恢复出厂设置您的设备。
默认用户名和密码都是 recamera。如果您执行恢复出厂设置或使用新的(未配置的)设备,这些是要使用的用户名和密码。
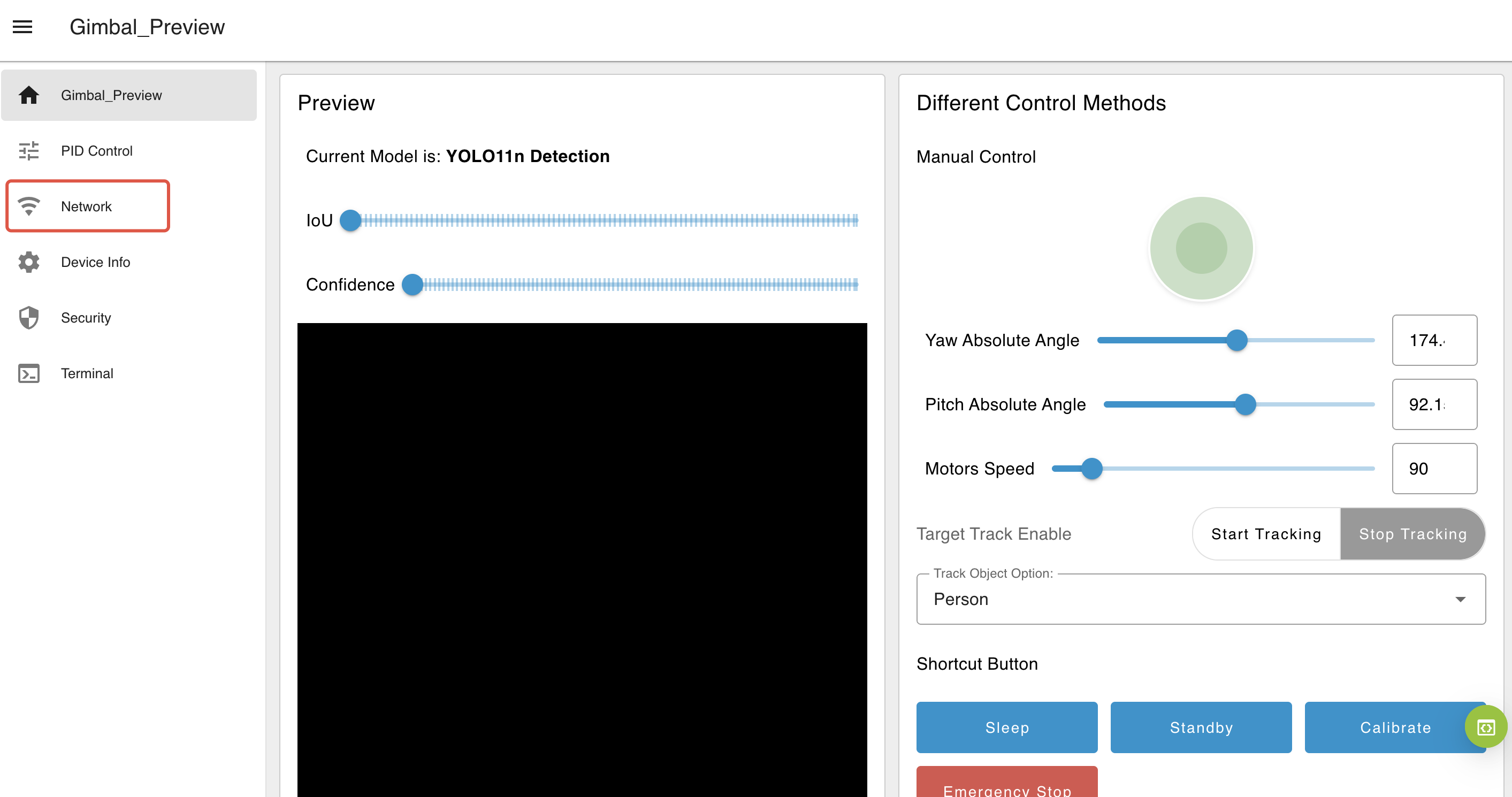
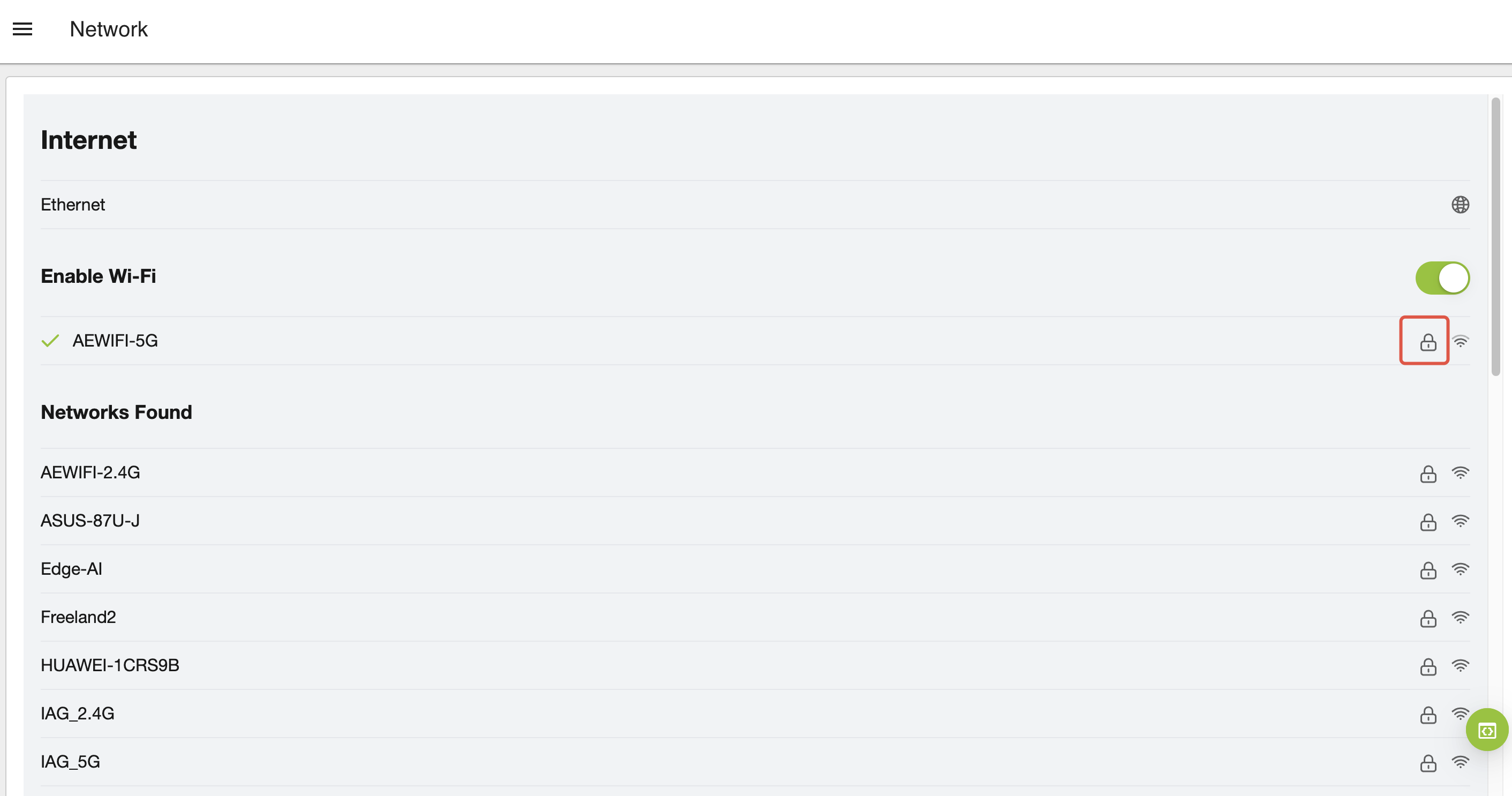
步骤2: 您将被带到云台预览仪表板。在使用仪表板上的控件体验一些电机运动之前,请转到 Network 设置 Wi-Fi。
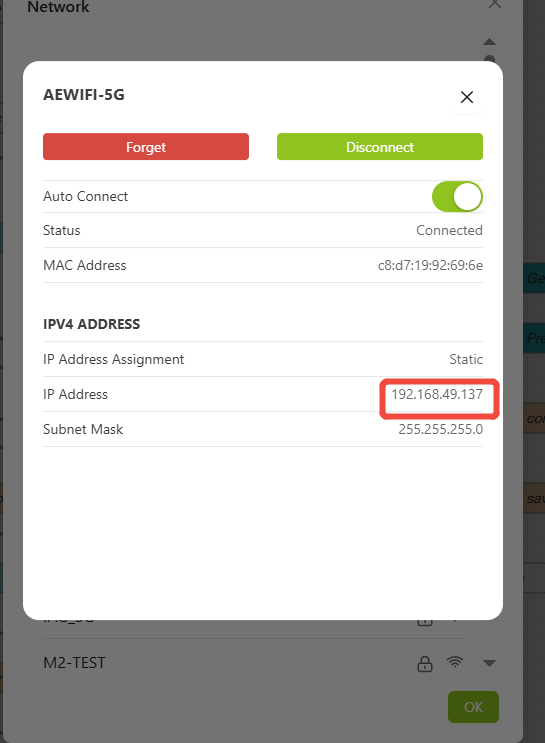
步骤3: 连接到您的 Wi-Fi。成功连接到 Wi-Fi 后,点击锁图标查看设备 IP 地址。
步骤4: 打开新的浏览器标签页,使用此 IP 地址访问设备。
步骤6: 首先将电源连接到底座,然后拔掉 USB Type C 线缆以获得最佳的电机运动效果。
应连接电压为 12V 的电源适配器。

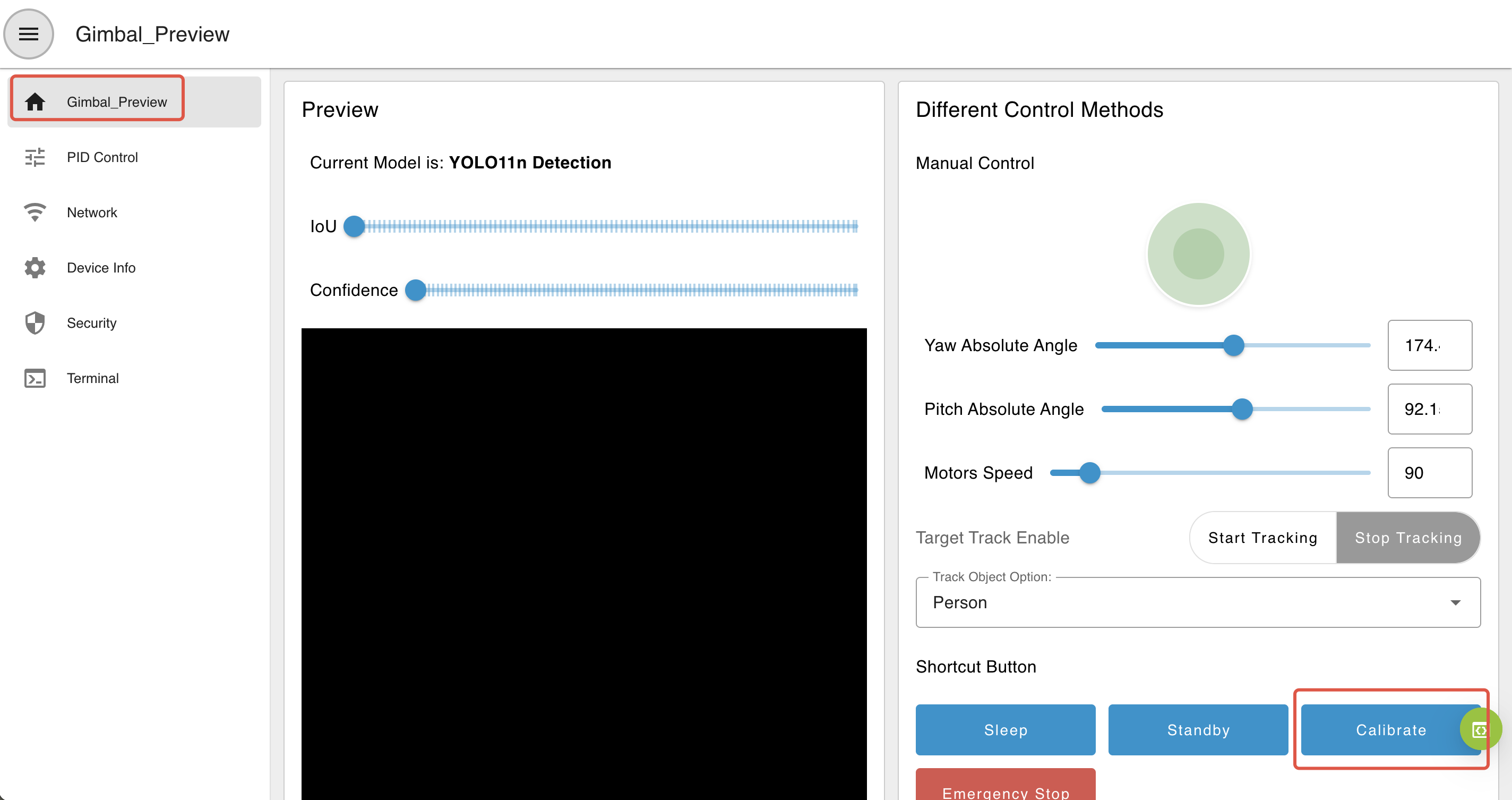
步骤7: 返回您的 ip 地址 浏览器访问仪表板,然后点击右侧的校准按钮让您的云台自行校准。
在校准过程中,避免干扰设备的操作,因为这可能导致校准失败。每次云台通电时都会自动执行校准。
校准行为
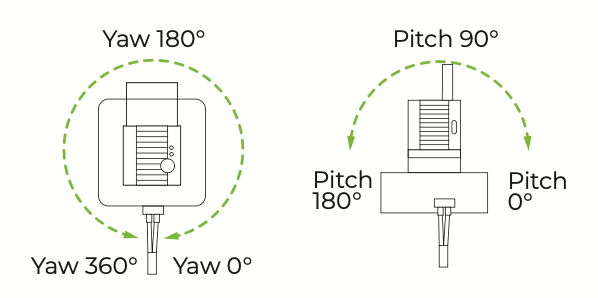
偏航轴的运动范围为 0–360°,尽管由于结构限制,实际机械范围限制在大约 345°。但是,视觉覆盖范围仍为 360°。俯仰轴支持 0–180° 的运动范围。
通电后,云台将开始其自动校准序列:
-
偏航轴:云台将首先顺时针旋转到其机械极限(位于电源线上方),然后逆时针旋转到相对极限。到达两端后,它将返回到中心位置。
-
俯仰轴:云台将向上倾斜到 0° 位置,然后向下到达 180° 极限,最后返回到中心。

此序列完成云台的自校准过程。
您也可以通过在终端中输入此命令进行校准
gimbal cali
校准问题故障排除
如果云台没有正确执行校准序列,可能有几个潜在原因:
-
验证机械限制:手动检查云台,确保运动范围没有被阻挡或错误限制。
-
检查3D打印部件的阻力:感受电机移动时是否有阻力。如果阻力过大,您可能需要调整电机的PID设置以增加电机力量。您可以查看如何调整PID。或者,通过打磨任何部件或稍微松开螺丝来减少摩擦以改善运动。
基本Web访问
Web网址:
-
预览页面:
ip_address/#/dashboard -
主页:
ip_address/#/init -
工作区:
ip_address/#/workspace -
网络配置:
ip_address/#/network -
安全:
ip_address/#/security -
终端:
ip_address/#/terminal -
系统:
ip_address/#/system -
电源:
ip_address/#/power -
原始Node-RED:
ip_address:1880
云台仪表板快速入门
电机控制
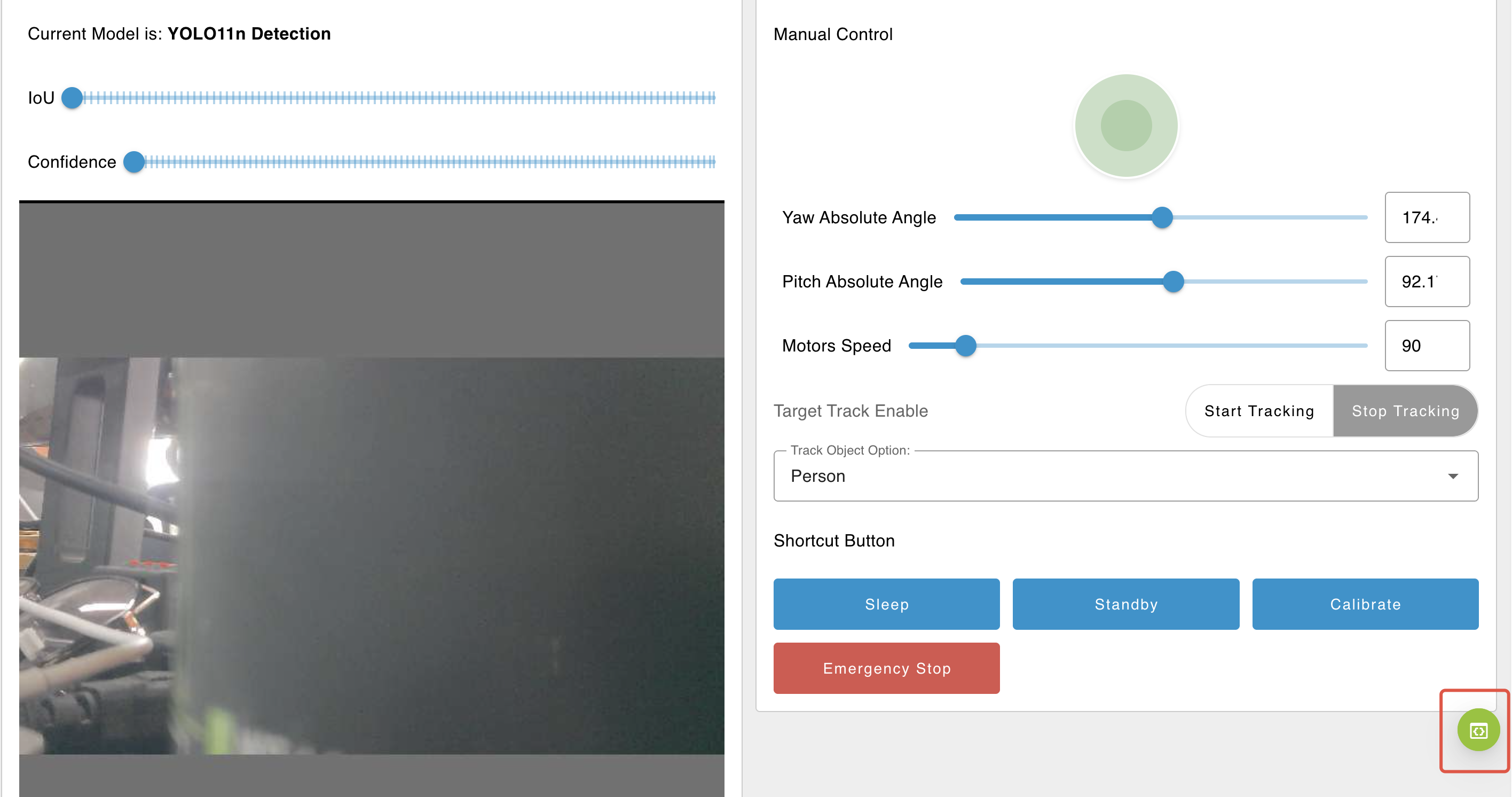
设置和校准完成后,您可以使用仪表板中的可用选项控制云台。访问ip_address/#/dashboard或ip_address来访问使用Node-RED节点制作的云台预览仪表板:
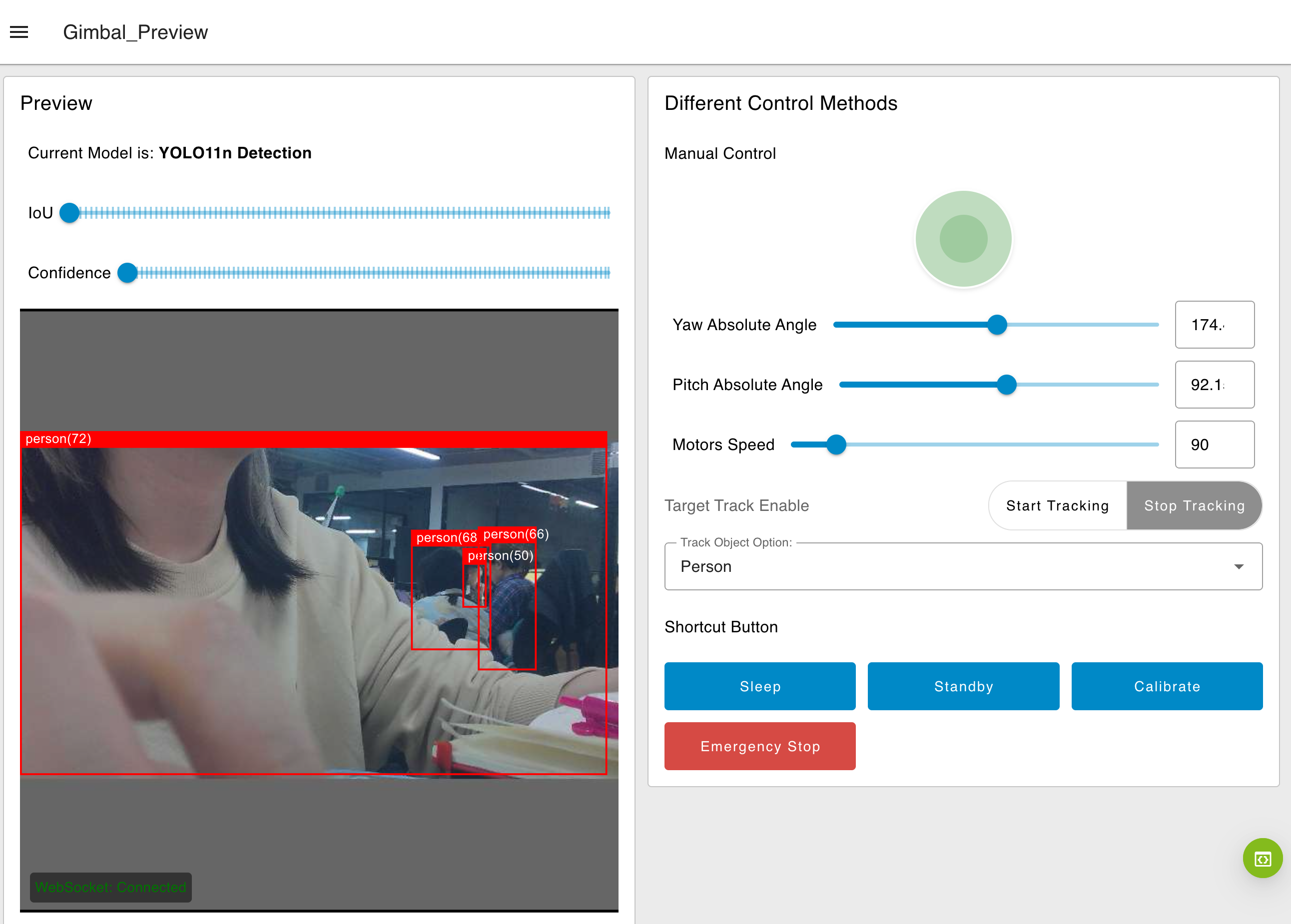
- 摇杆:控制相机视角的方向。例如,将摇杆向右拖动会使图像相应地向右移动。
- 滑块:
-
偏航和俯仰滑块:将云台移动到指定的绝对角度。
偏航范围:0–360°
俯仰范围:0–180°
-
由于结构限制,偏航范围限制为0–345°,俯仰范围限制为0–180°。任何输入超出这些范围的值都将调整到最接近的边界。例如,如果您为偏航输入360°,系统将自动执行345°的移动。
-
速度滑块:同时调整两个电机的速度。
速度范围:0–720°/s(度每秒)
-
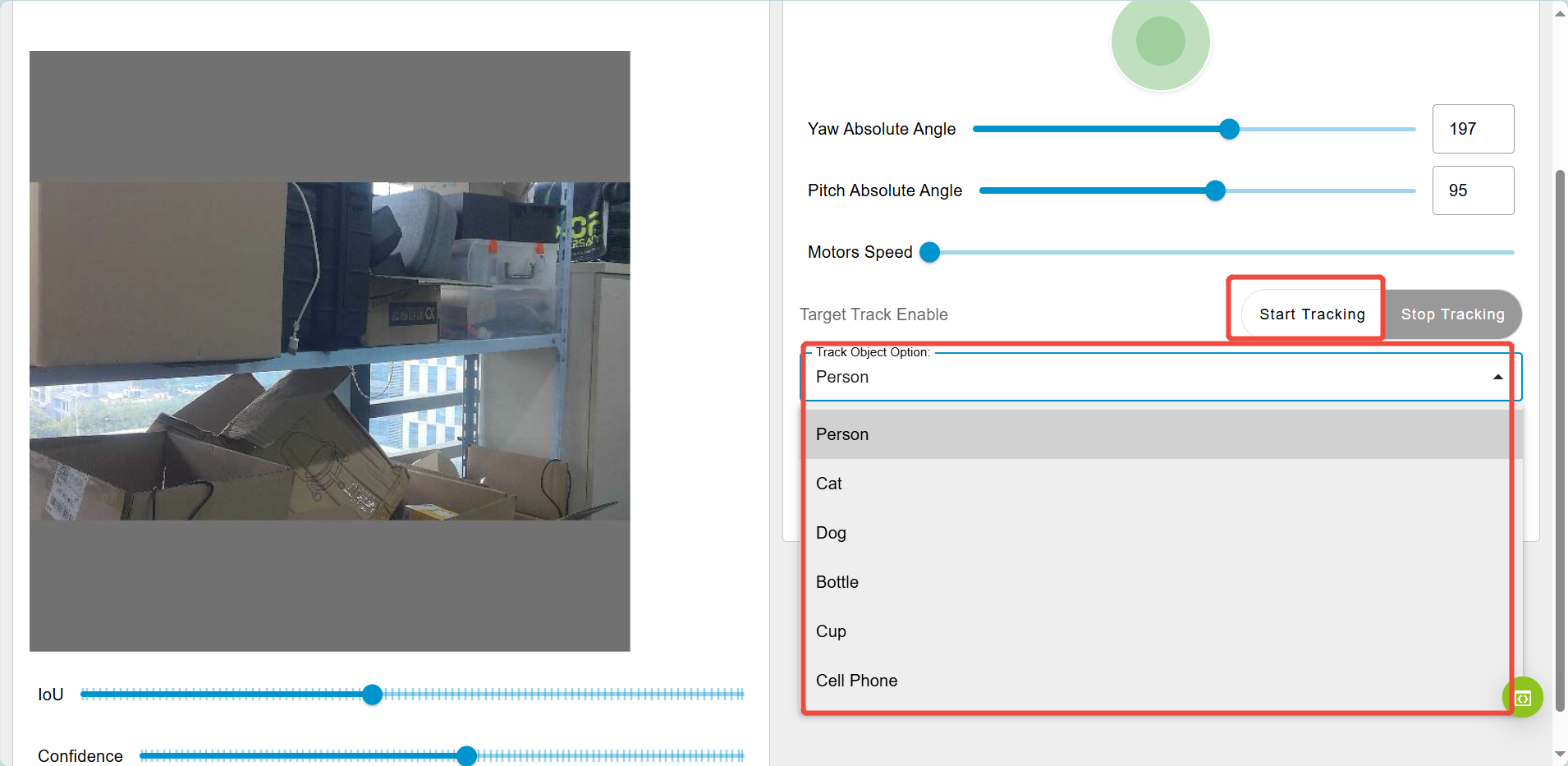
自动跟踪:从下拉菜单中选择目标对象(例如,人、汽车、猫、狗、瓶子),然后点击
开始跟踪来启动自动对象跟踪。点击停止跟踪来结束跟踪。
- 睡眠按钮:将云台移动到绝对位置(偏航:180°,俯仰:180°)。
睡眠按钮不会激活低功耗睡眠模式。它只是将相机重新定位为向下朝向。
-
待机按钮:将云台移动到绝对位置(偏航:180°,俯仰:90°)。
-
校准按钮:启动云台校准过程。
-
紧急停止按钮:在运动期间立即禁用两个电机。
⚠️ 注意:这不会中断校准过程。
AI模型参数
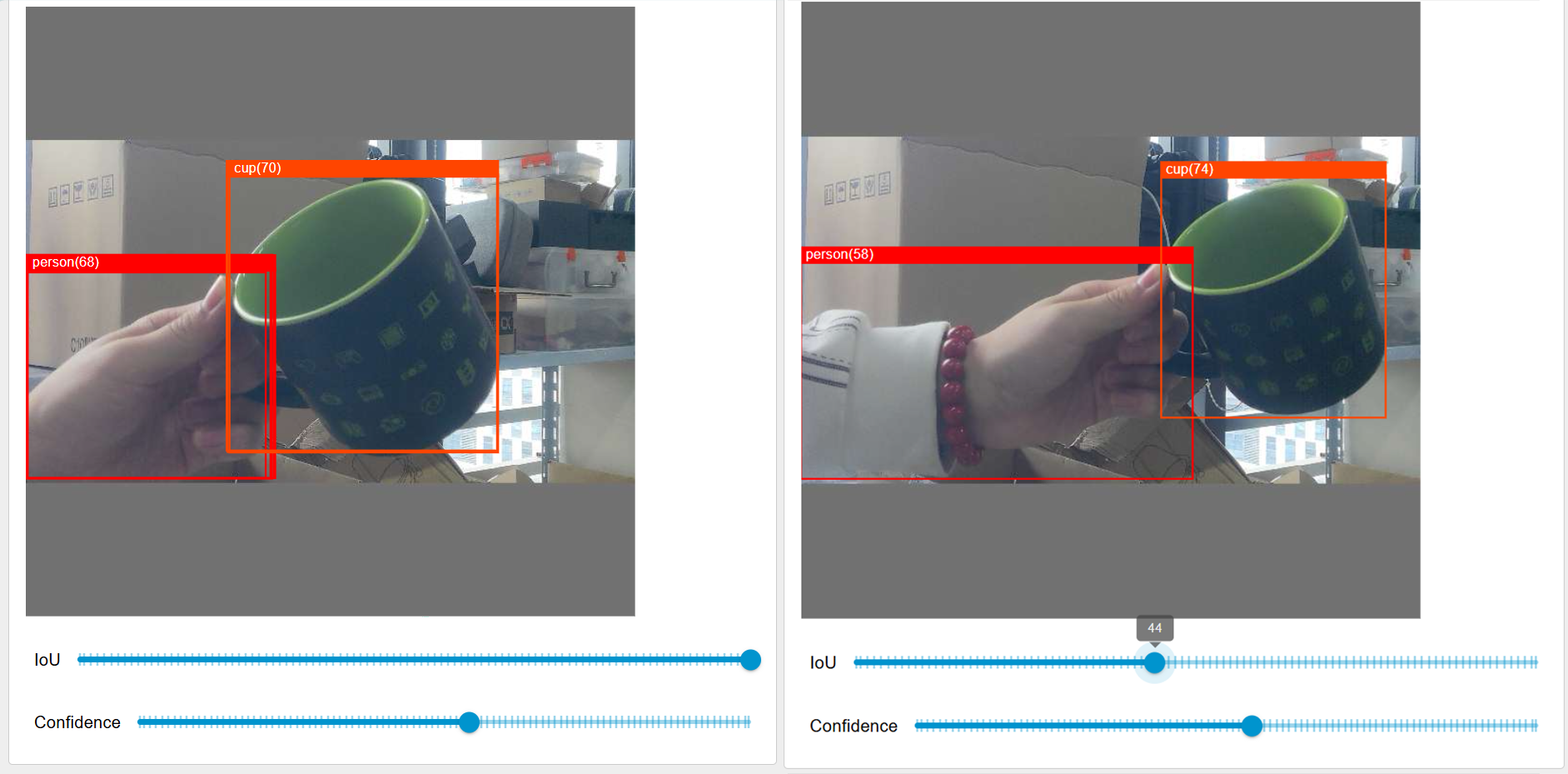
置信度:YOLO模型中的置信度表示预测边界框包含对象的概率以及预测的准确性。它是0到100之间的值。
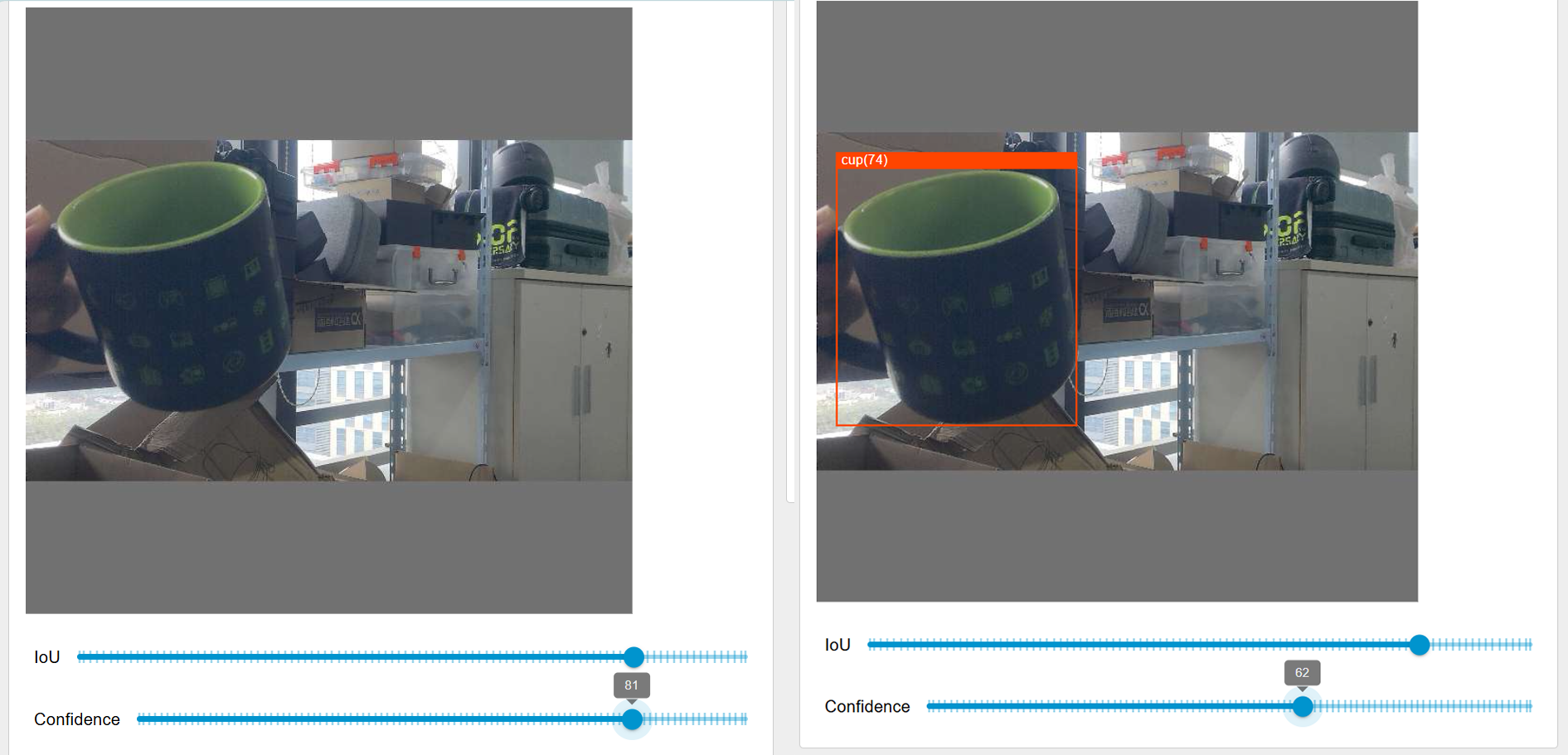
交并比(IoU):IoU是用于评估预测边界框与真实边界框之间重叠的指标。它计算为两个框的交集面积与两个框的并集面积的比率。IoU的值通常在0到1的范围内。我们将其标准化为0-100的比例,IoU值为0表示预测框与真实框之间没有重叠。值为100表示完美匹配,意味着两个框完全重叠。
云台仪表板流程快速入门
如果您想了解仪表板是如何使用Node-RED节点制作的,请点击右下角或访问ip_address/#/workspace来访问云台的Node-RED工作区
然后您将看到默认的云台仪表板流程,您可以双击每个节点来查看节点的详细信息。仪表板流程将如下所示:
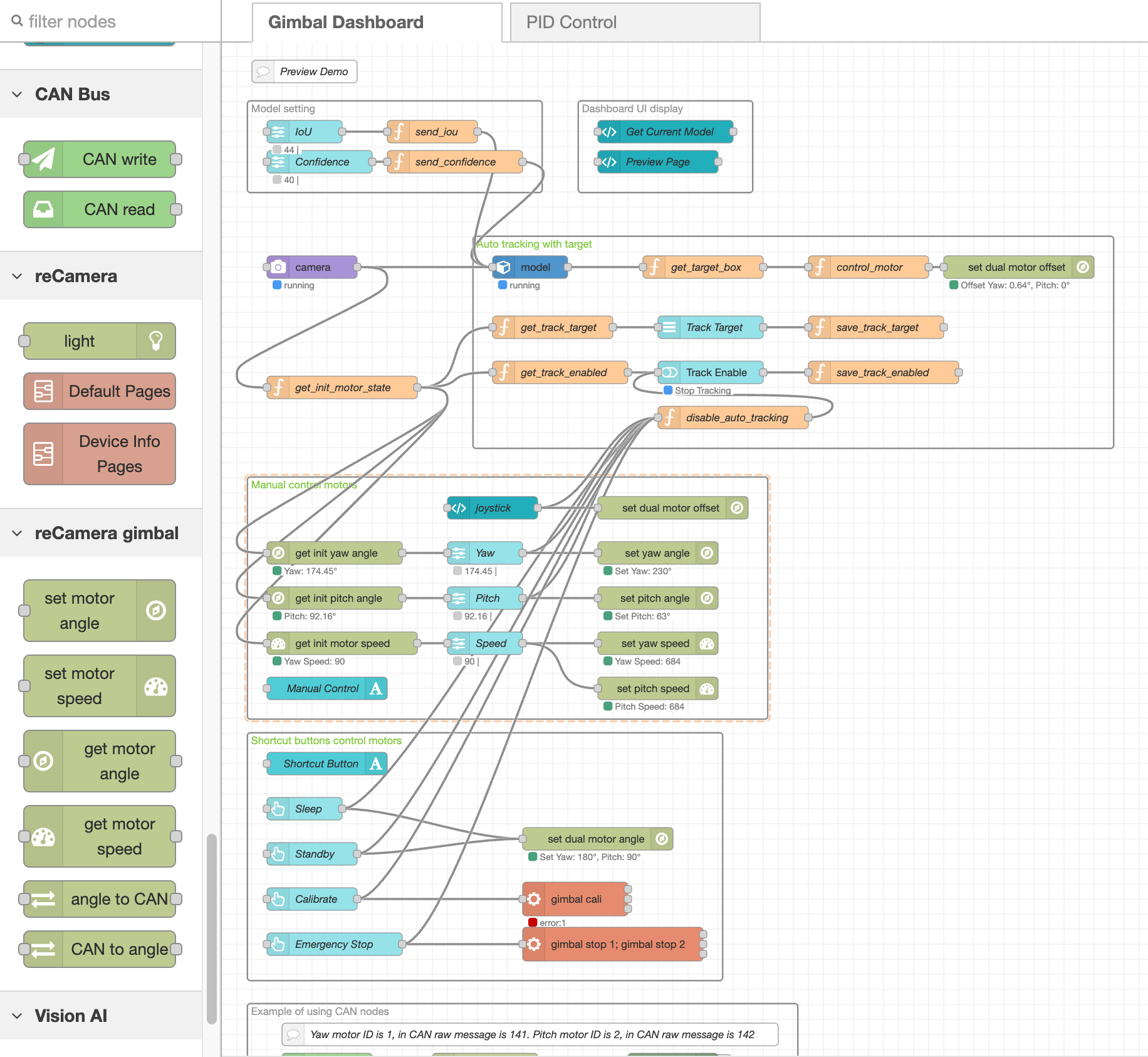
模型设置:
- 滑块节点允许您调整YOLO AI模型的IoU(交并比)和置信度阈值。
仪表板UI显示:
- UI模板节点显示显示当前模型设置的文本。
- 它还渲染来自相机的base64图像,包括YOLO识别的对象的检测框。
目标自动跟踪:
-
功能节点检索目标对象的信息(例如,宽度、高度、坐标)并使用跟踪算法处理这些数据。
-
算法功能节点计算目标框中心相对于视觉中心的偏移,并将此偏移发送到设置电机角度节点以将云台移动到所需位置。
手动电机控制:
-
使用滑块节点手动设置电机角度,将云台移动特定度数。
-
或者,摇杆UI节点允许通过小增量(逐偏移)调整云台位置进行手动控制。
快捷按钮:
-
按钮UI节点向设置电机角度节点发送特定位置,触发睡眠或待机等行为。
-
这些按钮还可以触发运行bash脚本的exec节点,如用于校准的
gimbal cali或用于紧急停止的gimbal stop 1; gimbal stop 2。
基本Web Iframe子流程:
-
iframe 子流显示基本的网页,如网络设置、系统信息和设备信息。
-
请注意,这些可能会消耗 CPU 资源,因为它会渲染包含多个节点的页面。如果不需要,可以删除。
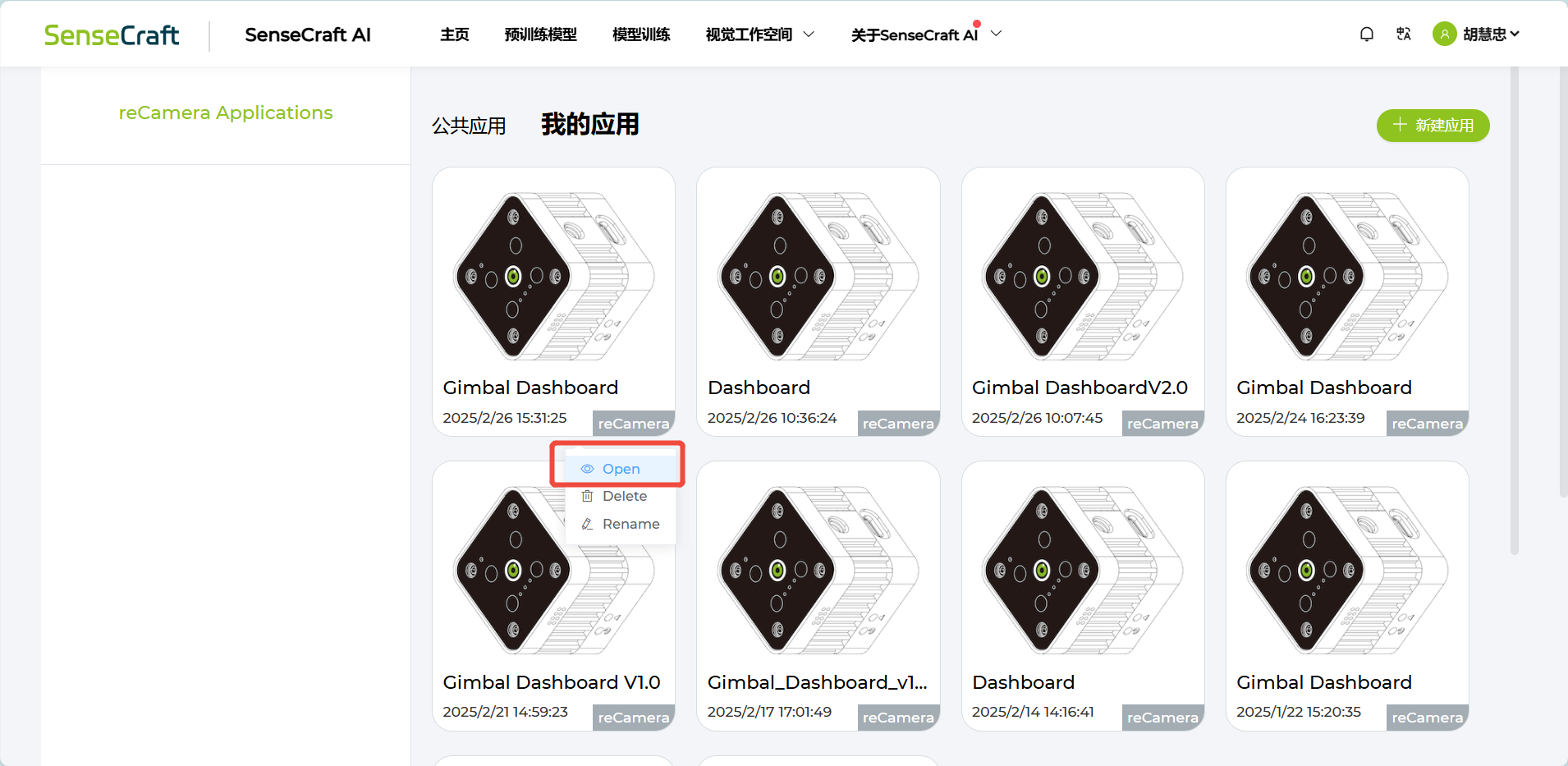
应用云管理和备份
如果您想创建新应用程序或将应用程序保存到 SenseCraft 云服务,您可以在左下角登录 sensecraft 账户,然后点击 + 图标来添加新应用程序。然后您就可以开始处理您的流程。
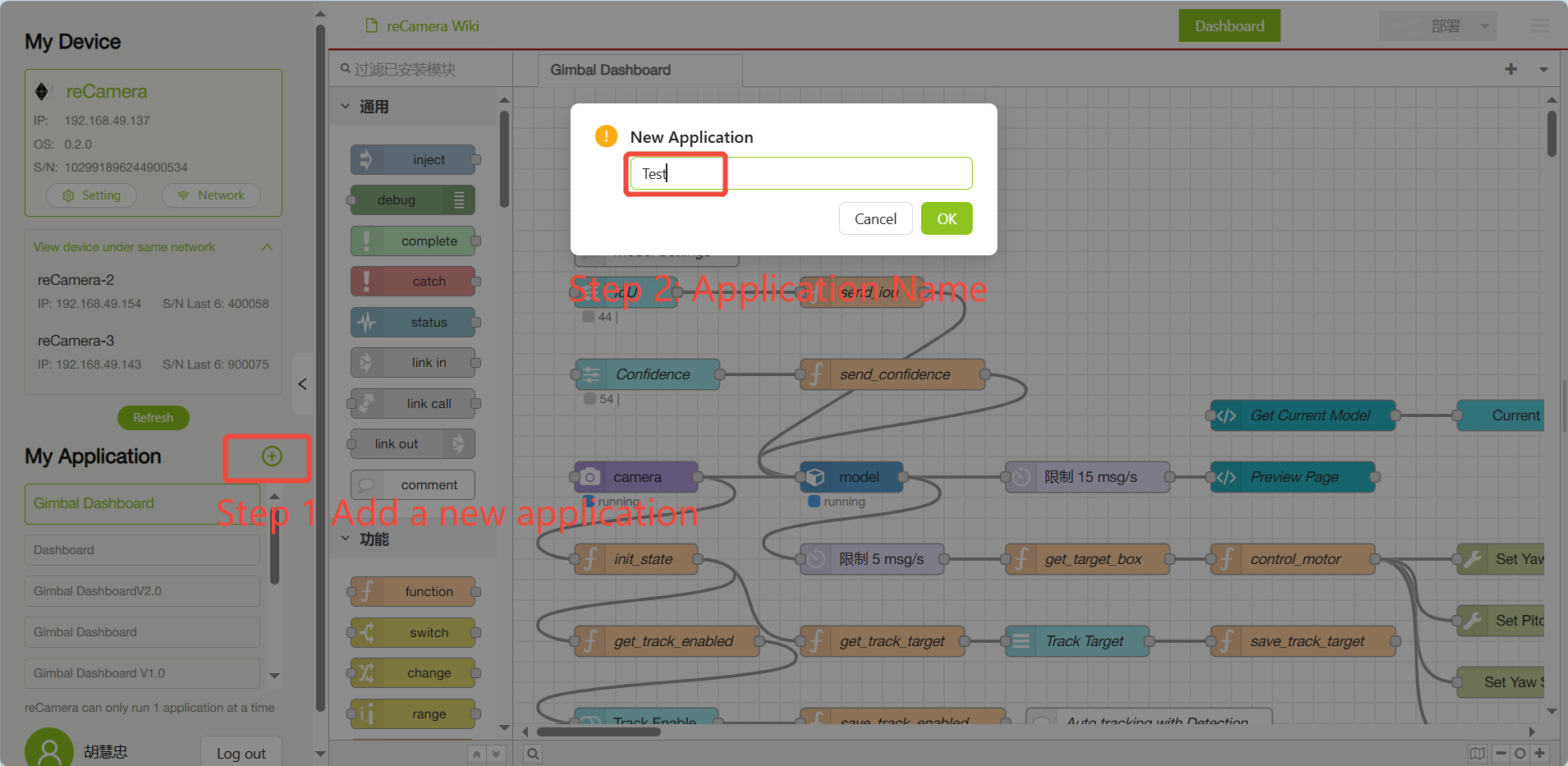
您可以在 reCamera - SenseCraft AI 查看和管理您的应用程序。
您需要先注册账户,然后才能通过平台登录来同步您的应用程序。
端口列表
以下列出了 reCamera Gimbal 使用的端口:
- 端口 22:用于远程 SSH 登录,处于开放状态。
- 端口 53:与 DNS 域名解析相关,对于网页重定向至关重要。默认开放。
- 端口 80:作为 Node-RED 应用程序 HTTP 显示的网页仪表板界面。
- 端口 554:用于 RTSP 视频流传输。
- 端口 9090:用于网页终端访问,需要密码登录。
- 端口 1880:专用于 Node-RED 操作。
OTA 系统升级
请参考 OTA 升级说明。
恢复出厂设置
如果您想重置设备(例如忘记设备密码),您可以长按 User 按钮,然后连接设备电源。当设备的 红灯 常亮 而不是闪烁时,松开 User 按钮。
资源
技术支持与产品讨论
感谢您选择我们的产品!我们在这里为您提供不同的支持,以确保您使用我们产品的体验尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。