云台的 Node-RED 介绍
本 wiki 提供了如何使用 Node-RED 节点来操作和控制云台上电机的分步指导。设备上的默认流程是一个更全面的示例,展示了如何将 UI 节点与云台节点结合使用,但我们将逐个分解节点来解释如何使用它们。
如果您是 Node-RED 的新手,或者您有兴趣学习如何将视觉 AI 与云台控制集成,请参考此页面。
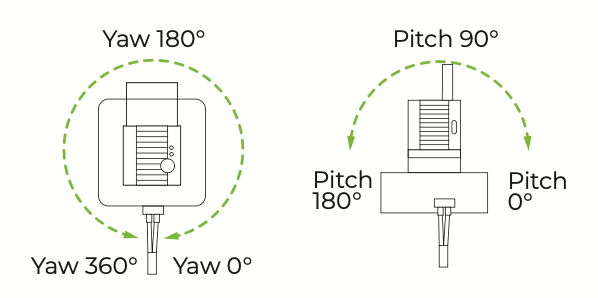
请同时注意云台的轴范围,如下图所示:
节点
设置电机角度
此节点允许您通过传入电机的目标值将云台设置到特定角度。当提供角度时,云台将相应移动以执行所需的定位。
示例:使用注入节点将偏航电机移动到 50°

配置
- Name:节点的自定义命名。
- Input:通过 msg、flow 或 global 变量自由解析角度值。
- Unit:输入值格式:
- Input in decimal:输入值为十进制度数(例如,180.23°)
- Input in integer:输入值为整数格式,表示百分之一度(例如,18023 = 180.23°)
- Motor Selection:选择要控制的电机和控制模式:
-
Yaw Axis (Left and Right):水平移动
-
Pitch Axis (Up and Down):垂直移动
-
Absolute Position:将电机设置到特定角度
-
Relative Offset:按相对量移动电机
-
- Set dual axis at the same time:使用单个命令控制两个电机
- Absolute Position:将两个电机设置到特定角度
- Relative Offset:按相对量移动两个电机
输入
对于单轴控制,输入是表示角度值的数字。
对于双轴控制,输入应该是具有以下结构的 JSON 对象:
{
"yaw_angle": value, // Horizontal angle in degrees
"yaw_speed": speed_value, // Optional: 0-720
"pitch_angle": value, // Vertical angle in degrees
"pitch_speed": speed_value // Optional: 0-720
}
输出
此节点不产生任何输出消息。它只设置电机角度并更新其状态显示以反映操作结果。
状态显示
节点在其状态中显示当前操作:
- 处理中:发送命令时显示蓝点和
Processing文本 - 成功:成功完成时显示绿点和操作详情:
- 单轴示例:
Set Yaw: 90°或Offset Pitch: 10° - 双轴示例:
Set Yaw: 90°, Pitch: 45°或Offset Yaw: 5°, Pitch: 10°
- 单轴示例:
- 错误:设置失败时显示红环和错误消息
- 忙碌:节点正在处理命令时显示黄环和
Busy文本
设置电机速度
该节点为偏航(水平)或俯仰(垂直)电机设置速度值。此速度设置存储在全局上下文中,并在其他电机控制节点使用 SocketCAN 发送移动命令时使用。
示例:使用滑块节点创建 UI 滑块来调整偏航电机速度。

仪表板由以下流程构成:

在此示例中,我们要确保将范围设置为 1-720,这是电机速度范围。还必须确保您传递给下一个节点的消息类型。这里我们选择 msg.topic。

由于在滑块节点中我们选择了 msg.topic,我们必须确保从 msg.topic 接收以响应滑块。

配置
您可以指定从何处获取输入值:
- msg:传入消息的属性(例如,payload)
- flow:流上下文变量
- global:全局上下文变量
电机选择:
- 偏航轴(左右):设置水平移动电机的速度
- 俯仰轴(上下):设置垂直移动电机的速度
输入
输入应为表示所需电机速度的数值。如果未设置自定义速度,默认速度值为 90。值可以以下列格式提供:
- 数字:90
- 包含数字的字符串:"45"
速度单位:速度值以 dps/LSB(度每秒/最低有效位)为单位测量,这是电机速度控制的分辨率。有效范围为 0 到 65535,云台的典型值在 50 到 720 之间。
速度参考值:
- 慢速移动:1-120
- 中速移动:120-360
- 快速移动:360-720
输出
此节点不产生任何输出消息。它只更新以下全局上下文变量:
- 偏航电机:can$$currentYawSpeed
- 俯仰电机:can$$currentPitchSpeed
速度值以十六进制格式(例如,速度 90 为 5A.00)存储在全局上下文中。
电机控制节点在通过 CAN 总线发送命令时检索这些值。
状态显示
节点在其状态中显示当前速度设置:
-
成功设置时显示绿点和
Yaw Speed: X或Pitch Speed: X -
设置失败时显示红环和错误消息。节点将在以下情况下报告错误:
- 无效输入值(非数字)
- 空输入值
获取电机角度
该节点检索偏航(水平)或俯仰(垂直)电机的当前位置并输出角度。这对于监控相机的当前方向或在流程中实现基于位置的逻辑很有用。
示例:使用按钮获取当前偏航电机角度位置

仪表板由以下流程构成:
按钮 UI 节点将触发获取电机角度节点,然后将结果解析给文本 UI 节点。
您也可以将下面的 json 导入到空流程中以获得此示例:
[{"id":"24bca102bda2cc7b","type":"ui-button","z":"4c965edca3cbeb30","group":"e339fda5d481fc57","name":"","label":"Get Angle","order":0,"width":0,"height":0,"emulateClick":false,"tooltip":"","color":"","bgcolor":"","className":"","icon":"","iconPosition":"left","payload":"","payloadType":"str","topic":"topic","topicType":"msg","buttonColor":"","textColor":"","iconColor":"","enableClick":true,"enablePointerdown":false,"pointerdownPayload":"","pointerdownPayloadType":"str","enablePointerup":false,"pointerupPayload":"","pointerupPayloadType":"str","x":180,"y":200,"wires":[["254d3292e774ea35"]]},{"id":"e339fda5d481fc57","type":"ui-group","name":"get angle","page":"d682a21c64a5b02a","width":"6","height":"1","order":1,"showTitle":true,"className":"","visible":"true","disabled":"false","groupType":"default"},{"id":"d682a21c64a5b02a","type":"ui-page","name":"Page 1","ui":"a6b81038728cf4fb","path":"/page1","icon":"home","layout":"grid","theme":"d7858d0ba6eee558","breakpoints":[{"name":"Default","px":0,"cols":3},{"name":"Tablet","px":576,"cols":6},{"name":"Small Desktop","px":768,"cols":9},{"name":"Desktop","px":1024,"cols":12}],"order":1,"className":"","visible":"true","disabled":"false"},{"id":"a6b81038728cf4fb","type":"ui-base","name":"My Dashboard","path":"/dashboard","appIcon":"","includeClientData":true,"acceptsClientConfig":["ui-notification","ui-control"],"showPathInSidebar":false,"headerContent":"page","navigationStyle":"default","titleBarStyle":"default","showReconnectNotification":true,"notificationDisplayTime":1,"showDisconnectNotification":true},{"id":"d7858d0ba6eee558","type":"ui-theme","name":"Default Theme","colors":{"surface":"#ffffff","primary":"#0094CE","bgPage":"#eeeeee","groupBg":"#ffffff","groupOutline":"#cccccc"},"sizes":{"density":"default","pagePadding":"12px","groupGap":"12px","groupBorderRadius":"4px","widgetGap":"12px"}}]
配置

电机选择:
- 偏航轴(左右):获取水平运动电机的角度
- 俯仰轴(上下):获取垂直运动电机的角度
单位:
- 以小数输出:以十进制度数输出角度值(例如,180.23°)
- 以整数输出:以表示百分之一度的整数格式输出角度值(例如,18023 = 180.23°)
输入
任何输入消息都会触发节点读取当前电机角度。输入消息的内容不会被使用。
输出
节点在 msg.payload 属性中输出当前角度值:
// With "Output in decimal" selected
{
"payload": 90.5
}
// With "Output in integer" selected
{
"payload": 9050
}
单位:
- 原始整数值:电机单位(百分之一度,偏航为 0-36000,俯仰为 0-18000)
- 转换后的十进制值:度数(偏航为 0° 到 360°,俯仰为 0° 到 180°)
状态显示
节点在其状态中显示当前角度:
- 查询电机时显示蓝点和
Reading - 成功获取时显示绿点和
Yaw: X°或Pitch: X° - 如果另一个查询已在进行中,显示黄色环和
Busy - 如果获取失败,显示红色环和错误消息
- 与电机的通信错误
- 来自电机的无效响应
- 并发请求(将显示
Busy状态)
获取电机速度
该节点读取存储在全局上下文中的偏航(水平)或俯仰(垂直)电机的当前速度值。此速度值在其他电机控制节点使用 SocketCAN 发送移动命令时使用。
示例:使用 injection node 获取电机速度并解析到调试窗口

通过点击注入节点,您将在调试窗口中看到当前偏航电机速度。
配置
- 偏航轴(左右):获取水平移动电机的速度设置
- 俯仰轴(上下):获取垂直移动电机的速度设置
- 速度值以
dps/LSB(度每秒/最低有效位)为单位测量,这是电机速度控制的分辨率。有效范围为 0 到 65535,云台的典型值在 50 到 720 之间。
输入
任何输入消息都会触发节点从全局上下文中读取当前电机速度。输入消息的内容不被使用。
输出
节点在 msg.payload 属性中输出当前速度值:
{
"payload": 90
}
状态显示
节点在其状态中显示当前速度值:
- 成功获取时显示绿点和
Speed: X - 获取失败时显示红环和错误消息
角度转 CAN
该节点接收数字角度值作为输入,并生成可直接发送到 CAN 总线接口或 CAN 写入节点的 CAN 消息对象。
示例:使用 inject 节点 让偏航轴顺时针或逆时针旋转 30 度。angle to CAN 节点将数字转换为 CAN 命令,并使用 CAN Write 执行命令。

您可以在 inject 节点中设置消息载荷如下:


并为相对偏移设置 angle to CAN 节点:

对于 CAN write,只需添加默认客户端并选择客户端。
配置
- 电机选择:选择要控制的电机和控制模式:
-
偏航轴(左右):水平移动
-
俯仰轴(上下):垂直移动
-
绝对位置:将电机设置到特定角度
-
相对偏移:按相对量移动电机
-
- 单位:输入值格式:
- 十进制输入:输入值为十进制度数(例如,180.23°)
- 整数输入:输入值为整数格式,表示百分之一度(例如,18023 = 180.23°)
输入
指定角度值的来源:
- msg.xxx:使用 msg 中的值
- flow.xxx:使用流上下文中的值
- global.xxx:使用全局上下文中的值
输入应为表示目标角度(用于绝对定位)或角度偏移(用于相对角度移动)的数值。
示例:
90.5 - 移动到 90.5 度(使用十进制度数时) 9050 - 移动到 90.5 度(使用电机单位时) -10 - 逆时针移动 10 度(使用相对偏移时) 10 - 顺时针移动 10 度(使用相对偏移时)
输出
该节点输出可直接发送到 CAN 总线的 CAN 消息对象:

{
"payload": {
"id": 0x141, // Motor ID in hex format (0x141 for Yaw, 0x142 for Pitch)
"data": [0xA4, 0x00, 0x5A, 0x00, 0x10, 0x27, 0x00, 0x00] // Command data as byte array
}
}
注意:321 是偏航电机(ID 141)的十六进制格式,322 是俯仰电机(ID 142)的十六进制格式。
命令格式
输出的 CAN 消息遵循此格式,详细信息请访问最新电机手册:
绝对位置命令
- 字节 0:命令类型(0xA4)
- 字节 1:方向(0x00)
- 字节 2-3:速度(2 字节,小端序)
- 字节 4-7:角度(4 字节,小端序)
相对偏移命令
- 字节 0:命令类型(0xA8)
- 字节 1:方向(0x00)
- 字节 2-3:速度(2 字节,小端序)
- 字节 4-7:偏移量(4 字节,小端序)
角度限制
- 偏航:-180° 到 +180°
- 俯仰:-90° 到 +90°
超出这些范围的值将自动限制在允许的范围内。
状态显示
节点在其状态中显示当前角度:
- 绿点显示
命令 ID+电机 ID+移动度数
Can Write
CAN Write 节点允许您向 CAN 总线设备发送命令帧并接收其响应帧。它特别适用于查询设备状态、发送控制命令和监控来自 CAN 总线设备的响应。
使用示例如上面的 angle to CAN 节点所示。
配置
- 名称:节点的可选名称
- 客户端:选择要使用的 CAN 总线配置(必须在 CAN-config 节点中配置)
输入
输入支持两种格式:
格式 1:字符串格式(推荐)
格式为 ID#DATA 的字符串,其中 ID 是十六进制的 CAN 标识符,DATA 是点分隔的十六进制字节。
示例:141#c1.0a.64.00.00.00.00.00
格式 2:对象格式
具有以下结构的对象:
{
"id": "141",
"data": ["A4", "00", "2C", "01", "50", "46", "00", "00"]
}
其中:
- id:CAN 标识符,以字符串形式表示(十六进制格式,不带 0x 前缀)
- data:十六进制数据字节数组(不带 0x 前缀)
输出
节点输出具有以下结构的对象:(有关每个 CAN 命令的详细信息,请访问最新电机手册)
{
"payload": "141#90.00.AB.02.3C.4C.91.49",
"details": {
"id": "141",
"data": ["90", "00", "AB", "02", "3C", "4C", "91", "49"],
"raw": "90.00.AB.02.3C.4C.91.49"
},
"timestamp": 1632048172456,
"topic": "can-response"
}
其中:
- payload:格式为
ID#DATA的字符串 - details:包含详细信息的对象:
- ID:CAN 标识符(与请求相同)
- data:十六进制响应字节数组
- raw:响应字节的点分隔字符串
- timestamp:接收响应的时间
- topic:设置为 "can-response"
示例
请求(输入字符串):
141#90.00.00.00.00.00.00.00
响应(输出):
{
"payload": "141#90.00.AB.02.3C.4C.91.49",
"details": {
"id": "141",
"data": ["90", "00", "AB", "02", "3C", "4C", "91", "49"],
"raw": "90.00.AB.02.3C.4C.91.49"
},
"timestamp": 1632048172456,
"topic": "can-response"
}
响应处理
节点等待来自 CAN 设备的响应,并自动过滤响应帧,以确保您收到针对特定命令的相关响应。
超时
如果在配置的超时时间内未收到响应,节点将输出错误消息。
错误处理
节点将在以下情况下报告错误:
- 无效的输入格式
- CAN 总线通信错误
- 响应超时
CAN to Angle
该节点接收 CAN 消息对象作为输入,并提取电机 ID、命令类型和角度/偏移值。它支持绝对位置命令 (A4)、相对偏移命令 (A8) 和状态查询命令 (94)。

配置
输入字段允许您指定包含 CAN 消息对象的消息属性、流上下文或全局上下文变量。默认情况下,它使用 msg.payload。
输入
输入应该是具有以下结构的 CAN 消息对象:
{
"id": 0x141, // Motor ID in hex format (0x141 for Yaw, 0x142 for Pitch)
"data": [...] // Byte array containing the command data (8 bytes)
}
Example:
{
"id": 0x141,
"data": [0xA4, 0x00, 0x5A, 0x00, 0x10, 0x27, 0x00, 0x00]
}
命令验证
该节点包含高级验证功能,确保只处理有意义的数据命令:
- 94 命令:剩余字节不能全部为零(这表示查询而非响应)
- A4/A6 命令:第二个字节必须是 0x00 或 0x01 才被认为有效(排除像 0x2F 这样的 ACK 响应)
- A8 命令:第二个字节必须是 0x00 才被认为有效
这些验证规则防止处理 ACK 响应和查询命令,避免产生错误的角度计算。
单位
- 十进制输出:以十进制度数输出角度值(例如,180.23°)
- 整数输出:以表示百分之一度的整数格式输出角度值(例如,18023 = 180.23°)
输出
该节点输出包含解码信息的 JSON 对象:
对于选择了"十进制输出"的绝对位置命令 (A4):
{
"payload": {
"motorId": 0x141,
"angle": 90.5
}
}
对于选择了"以整数输出"的绝对位置命令(A4):
{
"payload": {
"motorId": 0x141,
"angle": 9050
}
}
对于相对偏移命令(A8),选择"以十进制输出"时:
{
"payload": {
"motorId": 0x142,
"offset": 5.0
}
}
对于选择了"以十进制输出"的状态查询命令(94):
{
"payload": {
"motorId": 0x141,
"status": true,
"angle": 90.5
}
}
电机 ID
- 偏航电机(水平):
0x141 - 俯仰电机(垂直):
0x142
命令类型
0xA4:绝对位置命令0xA8:相对偏移命令0x94:状态查询命令
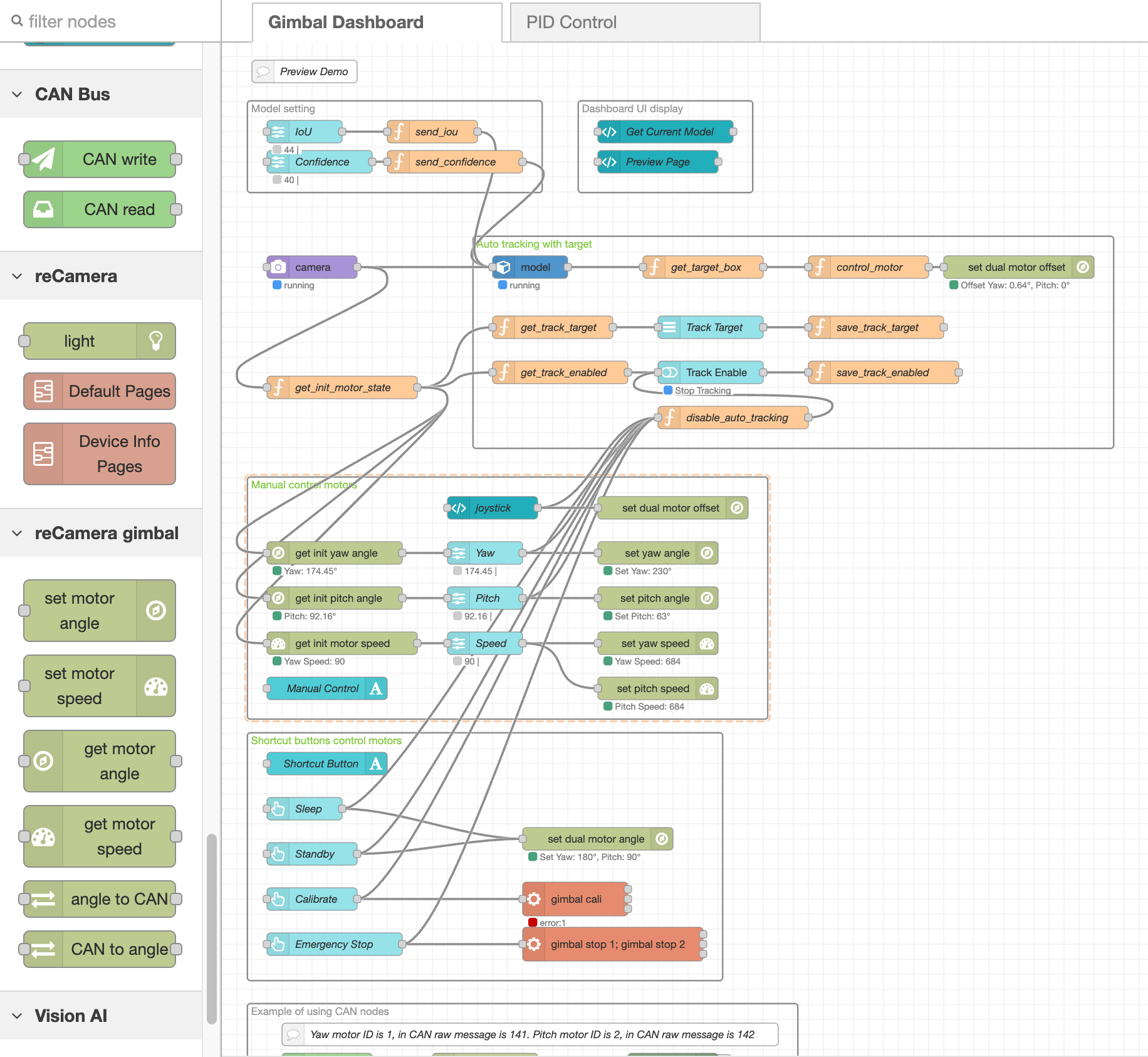
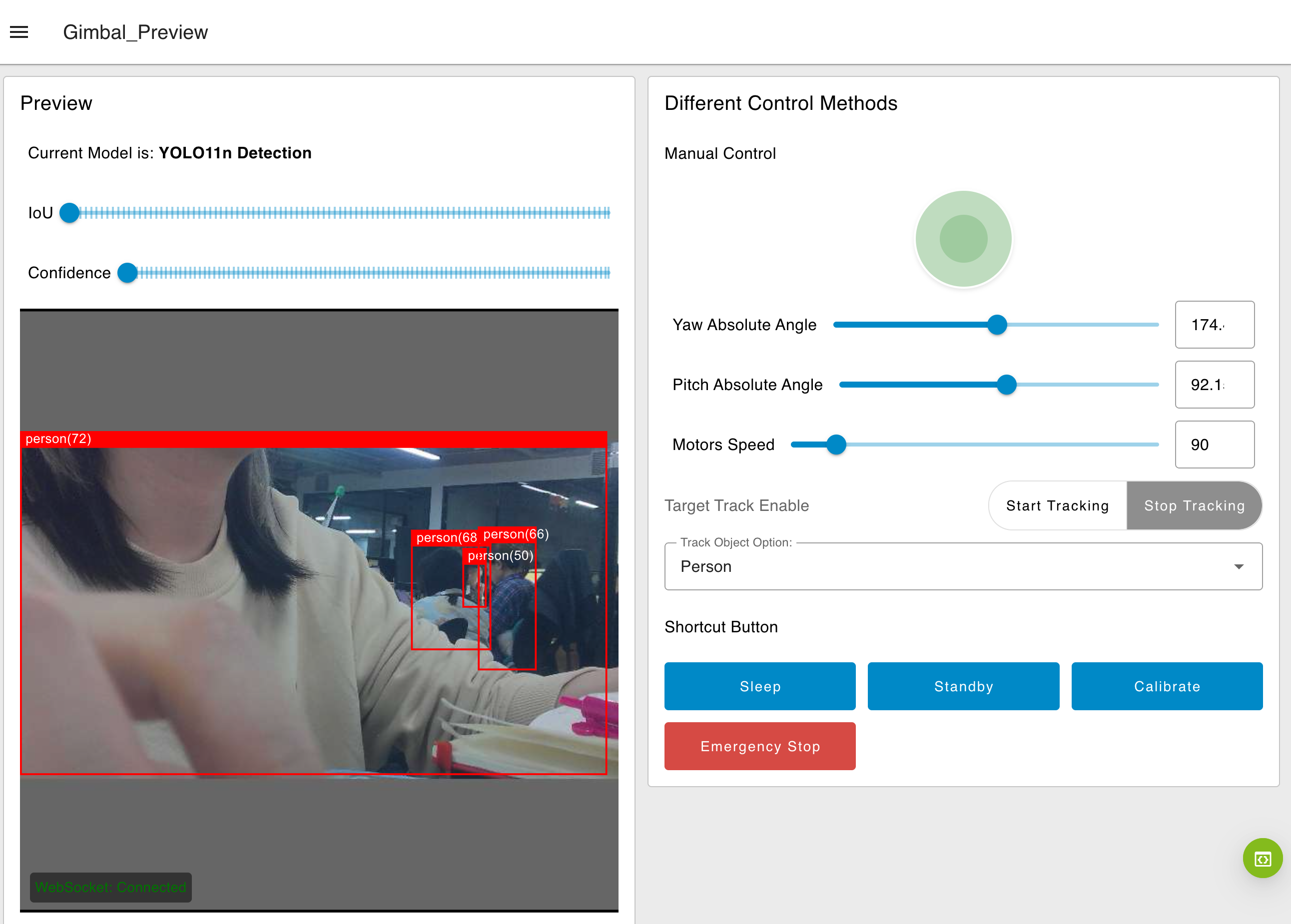
默认流程说明
默认流程是一个示例,展示了如何使用仪表板 UI 调色板、视觉 AI 调色板和 reCamera 调色板来构建一个可以预览摄像头、跟踪特定对象并控制电机的仪表板。仪表板如下所示:
我们将分解每个单独的功能,帮助您更好地理解这个流程。
自动跟踪
流程的这一部分处理自动跟踪功能。
-
模型节点:运行 YOLO 模型并输出检测结果,如检测框的 x、y、w、h、对象 ID。 -
函数 get_target_box 节点:函数节点仅提取所需对象的边界框信息。算法选择最大的边界框,通常是最近或最相关的跟踪目标。 -
函数 control_motor 节点:计算此边界框中心与摄像头帧中心之间的偏移量。 -
设置电机偏移节点:接收偏移值,然后解析 CAN 命令到电机,以保持目标在帧中居中。 -
函数 get_track_target 节点:将 Yolo 算法中的对象 ID 与实际对象名称匹配,并更新全局变量trackTarget。 -
下拉列表 UI 节点:在仪表板中提供下拉列表 UI。用户可以实时选择 TrackTarget。 -
函数 save_track_target 节点:从下拉列表交互中更新 TrackTarget。 -
函数 get_track_enable 节点:获取全局变量trackEnabled的状态。 -
跟踪启用按钮组节点:在仪表板中提供切换按钮 UI,供用户启用或禁用自动跟踪。 -
函数 save_track_enabled 节点:更新全局变量trackEnabled是否启用。
手动控制
手动控制流程允许用户通过与 UI 滑块交互来移动云台电机。

-
摇杆节点:使用模板 UI 节点绘制交互式摇杆,将运动数据解析到下一个节点。 -
设置双电机角度节点:选择同时设置双轴配置。使用从摇杆解析的 json 同时控制电机运动。请注意,这控制的是图像的运动,而不是物理云台的实际方向。 -
获取电机角度节点:在设备上电时检索偏航和俯仰电机的初始位置,并与滑块 UI 节点同步。 -
获取电机速度节点:在设备上电时检索偏航电机的初始速度,并与滑块 UI 节点同步。 -
滑块 UI 节点:在仪表板上提供滑块 UI 供用户与电机交互。注意我们这里只使用一个速度滑块来同时控制两个电机的速度。您可以使用 2 个节点为两个电机分配不同的速度。 -
设置电机角度节点:从滑块 UI 节点接收数据,并解析 CAN 命令执行电机到特定位置。 -
设置电机速度节点:从滑块 UI 节点接收数据,并更新电机速度的全局变量,准备与位置命令一起发送。
快捷按钮

按钮 UI 节点:在仪表板上提供按钮 UI 供用户与云台交互。点击时,节点将发送分配的值:-
休眠:
{"yaw_angle":180, "yaw_speed":360, "pitch_angle":175, "pitch_speed":360} -
待机:
{"yaw_angle":180, "yaw_speed":360,"pitch_angle":90, "pitch_speed":360} -
校准:触发执行节点
-
紧急停止:触发执行节点
-
通过点击这些按钮,trackEnabled 也会被更新为禁用状态以停止自动跟踪(如果它是开启的)。
执行节点:运行系统命令并返回其输出。您可以为云台执行任何 bash 脚本:-
校准:
gimbal cali -
紧急停止:
gimbal stop 1; gimbal stop 2如果您在终端中输入
gimbal,可以查看所有可用的脚本。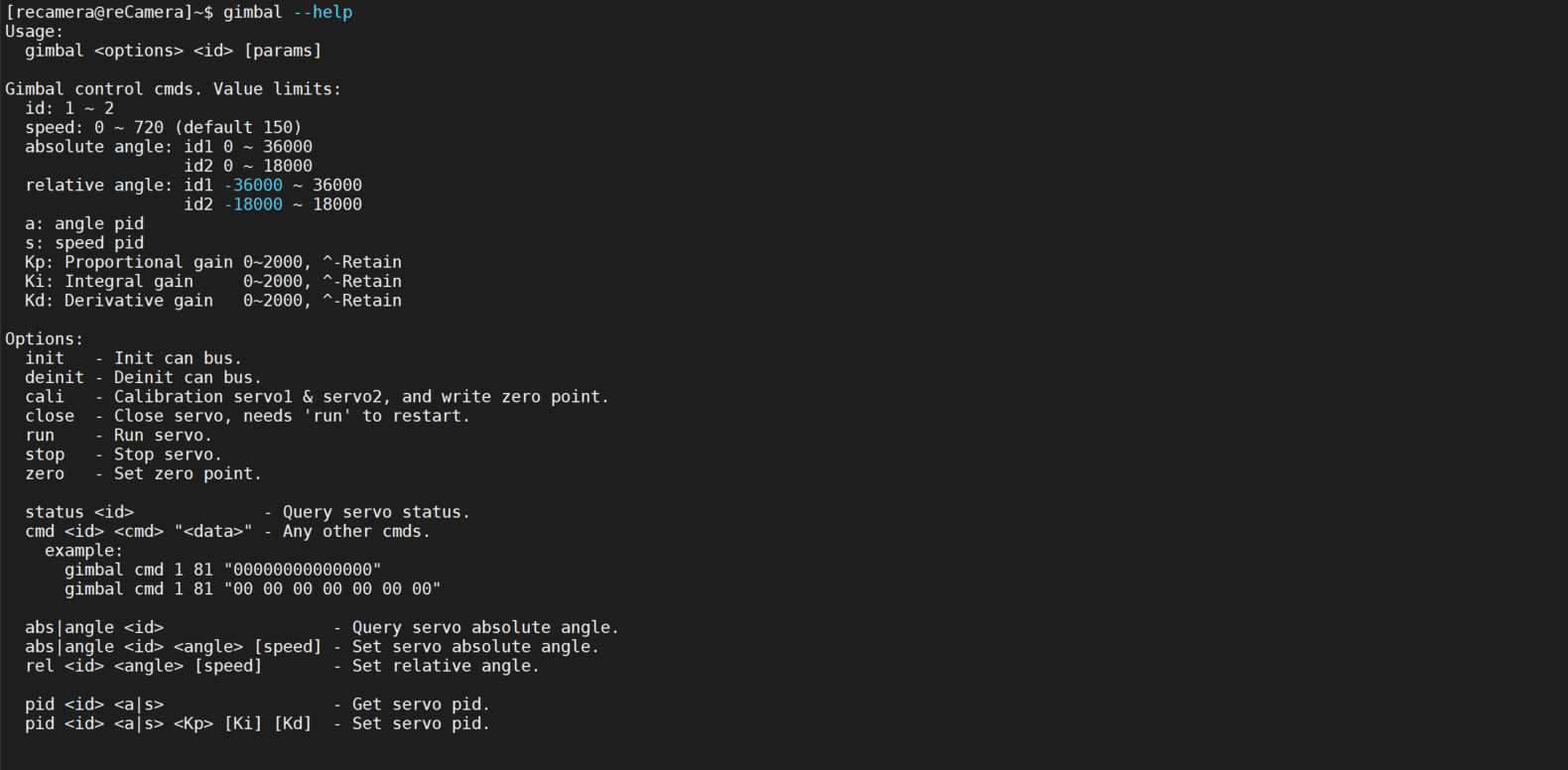
-
CAN 节点
此示例未显示在仪表板上,因为它没有任何 UI 节点。这是工作区中的一个示例,演示如何使用以下节点。

-
CAN 读取节点:持续监听配置接口上的 CAN 消息,并以标准化格式输出它们。 -
CAN 转角度:解码并将从 CAN 总线读取的原始数据转换为角度值。 -
注入节点:为角度转 CAN节点解析30度来移动电机。 -
角度转 CAN:接受数字角度值(在此情况下为 30)作为输入,并生成可直接发送到 CAN 总线接口或 CAN 写入节点的 CAN 消息对象。 -
CAN 写入:向 CAN 总线设备发送命令帧并接收其响应帧。在这种情况下,它将解析"payload": {
"id": 0x141, // 十六进制格式的电机 ID(偏航为 0x141,俯仰为 0x142)
"data": [0xA8, 0x00, 0x5A, 0x00, 0xb8, 0xb, 0x00, 0x00] // 字节数组形式的命令数据
}到 CAN 命令以逆时针旋转 30 度。
PID 控制
请查看此处关于PID节点的文档。
技术支持与产品讨论
感谢您选择我们的产品!我们在这里为您提供不同的支持,以确保您使用我们产品的体验尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。