将 MediaPipe 手势识别模型移植到 reCamera
介绍
本项目演示如何将 Google 官方的 MediaPipe 手势识别套件 完整移植到 reCamera 上,实现实时手势识别,并通过 UDP 将视频和识别结果流式传输到 PC 进行可视化。
系统可以识别 8 种手势类别(None / Closed_Fist / Open_Palm / Pointing_Up / Thumb_Down / Thumb_Up / Victory / ILoveYou),同时输出 21 个手部关键点 以及 左右手(handedness) 信息,适用于以下应用场景:
- 智能家居手势控制:通过预设手势控制灯光、窗帘和家电开关,无需语音或手机 App。
- 工业无接触交互:戴手套或双手被占用的工人可以通过简单手势向设备发送指令。
- 教育与展陈交互:在科技馆或展览馆中,参观者可通过手势触发多媒体内容,获得沉浸式体验。
- 无障碍辅助:为听力障碍或行动不便用户提供基于手势的设备控制入口。
硬件准备
要运行本演示,需要以下硬件:
- 一台 reCamera 设备(支持所有 reCamera 型号)
- 一台 PC(用于运行 Python 接收端进行可视化;必须与 reCamera 处于同一局域网)
你可以根据部署需求选择 任意版本的 reCamera:
- reCamera 2002 系列(Wi-Fi)
- reCamera Gimbal
- reCamera HQ PoE(以太网 + PoE)
注意:
PoE 版本不支持 Wi-Fi,必须通过支持 PoE 的交换机接入同一局域网。
| reCamera 2002 系列 | reCamera Gimbal | reCamera HQ PoE |
|---|---|---|
 |  |  |
工作原理
模型转换流程(TFLite → ONNX → cvimodel)
从官方 MediaPipe 仓库下载 TFLite 格式的模型,需要将其转换为 reCamera TPU 支持的 .cvimodel 格式:
MediaPipe TFLite (FLOAT16)
│ tf2onnx (--channel_format none, keep NHWC)
▼
ONNX (FLOAT32, NHWC) ← numerical reference (cos=1.0 vs TFLite)
│ tpu-mlir model_transform + model_deploy
├─ BF16
└─ INT8 (per-channel + real-data calibration)
▼
CVIMODEL (cv181x)
精度验证
转换完成后,通过三方对比(TFLite vs ONNX vs cvimodel)对模型进行验证:
| 模型 | 输出 | BF16 cos | INT8 cos |
|---|---|---|---|
| detector | scores | 1.0000 | 0.9896 |
| detector | boxes | 0.9999 | 0.9748 |
| landmark | lm63 | 1.0000 | 0.9999 |
| landmark | world63 | 0.9997 | 0.8098 |
| embedder | embedding | 1.0000 | 0.9992 |
| classifier | probs | 1.0000 | 0.9978 |
注意:INT8 量化后,
world63(世界坐标关键点)的精度有一定损失(cos=0.81),但端到端的手势分类结果与 TFLite 保持一致(类别判断可靠)。如果你的应用对世界坐标精度高度敏感,建议使用该模型的 BF16 版本。
构建示例
要构建本示例,你需要:
- 在 PC 上交叉编译 C++ 程序
- 在 reCamera 上运行编译好的可执行文件
- 在 PC 上运行 Python 接收脚本
步骤 1:编译 C++ 程序
在构建本方案之前,请确保已按照主项目文档配置好 ReCamera-OS 环境(版本 0.2.1 或更高),包括 SDK 路径和交叉编译工具链。
设置交叉编译工具链环境变量:
export PATH='current compile chain path'/host-tools/gcc/riscv64-linux-musl-x86_64/bin:$PATH
克隆仓库,并进入对应的 solution 目录进行构建:
git clone https://github.com/RobotXTeam/sscma-example-sg200x.git
cd sscma-example-sg200x/solutions/sesg-project/hand_gesture
export SG200X_SDK_PATH='current clone path'/sg2002_recamera_emmc
rm -rf build && mkdir build && cd build
cmake -DCMAKE_BUILD_TYPE=Release -DCMAKE_CXX_FLAGS="-std=c++17" ..
make -j$(nproc)
编译生成的可执行文件位于:build/hand_gesture
步骤 2:准备模型文件
本示例需要 4 个 .cvimodel 模型文件(INT8 量化版本),已在仓库中提供。如果你需要自行转换模型,请参考模型转换指南:
| 模型 | 文件名 | 说明 |
|---|---|---|
| 手掌检测 | hand_detector_cv181x_int8.cvimodel | 模型 1:SSD 手掌检测 |
| 关键点检测 | hand_landmarks_detector_cv181x_int8.cvimodel | 模型 2:21 个关键点 |
| 手势特征嵌入 | gesture_embedder_cv181x_int8.cvimodel | 模型 3:128 维特征嵌入 |
| 手势分类 | canned_gesture_classifier_cv181x_int8.cvimodel | 模型 4:8 类手势分类 |
将编译好的可执行文件和模型文件上传到 reCamera 的 /home/recamera/ 目录:
scp hand_gesture hand_detector_cv181x_int8.cvimodel hand_landmarks_detector_cv181x_int8.cvimodel \
gesture_embedder_cv181x_int8.cvimodel canned_gesture_classifier_cv181x_int8.cvimodel \
recamera@<reCamera_IP>:/home/recamera/ # Make sure the PC and reCamera are on the same network segment, then replace <reCamera_IP> with the corresponding IP address
步骤 3:配置 reCamera
在运行 C++ 程序之前,必须先停止默认的 Node-RED 服务,因为它们会占用相机资源。请通过 SSH 运行以下命令:
sudo /etc/init.d/S03node-red stop
sudo /etc/init.d/S91sscma-node stop
sudo /etc/init.d/S93sscma-supervisor stop
步骤 4:在 reCamera 上运行可执行文件
通过 SSH 登录 reCamera,授予执行权限并运行:
cd /home/recamera/
chmod +x hand_gesture
参数说明
| 参数 | 说明 | 默认值 |
|---|---|---|
palm_model | 手掌检测模型(必选) | - |
landmark_model | 关键点检测模型(必选) | - |
embedder_model | 手势特征嵌入模型(必选) | - |
classifier_model | 手势分类模型(必选) | - |
min_score | 手掌检测阈值 | 0.5 |
udp_ip | PC 的 IP 地址(启用 UDP 流式传输) | - |
udp_port | UDP 端口号 | - |
jpeg_w | JPEG 流视频帧宽度 | 320 |
jpeg_h | JPEG 流视频帧高度 | 240 |
jpeg_fps | JPEG 流视频帧率 | 10 |
skip_multi | 多手(≥2)时,每 N 帧运行一次推理 | 3 |
skip_single | 单手时,每帧运行一次推理 | 1 |
示例命令
基础用法(无 UDP 流,仅本地推理):
sudo ./hand_gesture \
hand_detector_cv181x_int8.cvimodel \
hand_landmarks_detector_cv181x_int8.cvimodel \
gesture_embedder_cv181x_int8.cvimodel \
canned_gesture_classifier_cv181x_int8.cvimodel
完整用法(UDP 流式传输 + 自定义参数):
sudo ./hand_gesture \
hand_detector_cv181x_int8.cvimodel \
hand_landmarks_detector_cv181x_int8.cvimodel \
gesture_embedder_cv181x_int8.cvimodel \
canned_gesture_classifier_cv181x_int8.cvimodel \
0.5 \
192.168.XX.XX 5001 \
320 240 10 \
3 1
- 请将
192.168.XX.XX替换为与你的 reCamera 处于同一网络的 PC 实际 IP 地址。只有同时提供udp_ip和udp_port时才会启用 UDP 流式传输。 - 如果程序显示 “[Heartbeat] Before the first retrieveFrame(RGB888) call...” 后卡住,请重启 reCamera。
步骤 5:在 PC 上运行 Python 接收端
在 PC 上,确保已安装所需的 Python 库:
pip install opencv-python numpy
进入解决方案目录并运行接收端脚本:
cd sscma-example-sg200x/solutions/sesg-project/hand_gesture
python3 tools/udp_receiver.py 5001
PC 端会显示一个实时视频窗口,包括:
- JPEG 视频流
- 手掌检测框(蓝色矩形)
- 21 个手部关键点(红点 + 连接骨架)
- 手势分类标签(左上角显示手势名称和置信度)
- 左右手信息
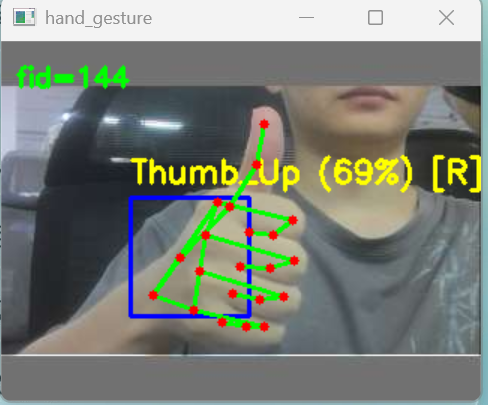
PC 端实时手势识别结果
预期输出
在 reCamera 终端上
程序运行后,会显示推理性能日志:
[Perf] FPS=5.88 (inference=2.94) | palm=120.7ms | landmark=169.1ms | gesture=0.6ms | total=290.4ms | avg_hands=1.00
[Gesture] Open_Palm (70%) [R] palm=(0.43,0.34,0.69,0.69) score=0.85
[LB-DIAG] #2 warpAffine sx=0.3000 sy=0.3000 tx=0.0 ty=24.0
[LB-DIAG] #2 canvas 192x192: nonzero=82944 min=0 max=255 mean=80.7
[DET-DIAG] setInput ret=0, run ret=0
[Gesture] Open_Palm (70%) [R] palm=(0.45,0.36,0.72,0.73) score=0.85
[Gesture] Open_Palm (70%) [R] palm=(0.45,0.36,0.72,0.73) score=0.85
[LB-DIAG] #2 warpAffine sx=0.3000 sy=0.3000 tx=0.0 ty=24.0
[LB-DIAG] #2 canvas 192x192: nonzero=82944 min=0 max=255 mean=82.0
[DET-DIAG] setInput ret=0, run ret=0
[Gesture] Open_Palm (60%) [R] palm=(0.45,0.41,0.72,0.77) score=0.88
[Gesture] Open_Palm (60%) [R] palm=(0.45,0.41,0.72,0.77) score=0.88
[LB-DIAG] #2 warpAffine sx=0.3000 sy=0.3000 tx=0.0 ty=24.0
[LB-DIAG] #2 canvas 192x192: nonzero=82944 min=0 max=255 mean=81.9
[DET-DIAG] setInput ret=0, run ret=0
[Gesture] Open_Palm (60%) [R] palm=(0.47,0.42,0.73,0.76) score=0.81
[Perf] FPS=5.93 (inference=2.97) | palm=120.6ms | landmark=177.2ms | gesture=0.6ms | total=298.4ms | avg_hands=1.00
[Gesture] Open_Palm (60%) [R] palm=(0.47,0.42,0.73,0.76) score=0.81
[LB-DIAG] #2 warpAffine sx=0.3000 sy=0.3000 tx=0.0 ty=24.0
[LB-DIAG] #2 canvas 192x192: nonzero=82944 min=0 max=255 mean=81.8
注意:手掌模型需要 192×192 的输入,这低于 VPSS 的最小缩放分辨率。因此,CH0 使用 640×480(VPSS 支持),模型在内部通过软件 letterbox 将其缩放到 192×192。
摄像头访问错误
如果你看到 "No camera" 或 "Camera device not found" 错误:
- 确保 Node-RED 服务已停止(参见步骤 3)
- 检查摄像头连接
UDP 连接失败
如果 PC 未接收到数据:
- 确认 PC 和 reCamera 在同一网络中
- 检查 PC 上的防火墙设置
- 确保 UDP 端口未被阻塞
- 使用
ping测试设备之间的连通性
手势识别置信度异常
如果识别出的手势置信度明显不对:
- 确认分类器模型之后的 C++ softmax 补丁 已正确实现
- 检查是否错误地使用了包含 Softmax 的 ONNX 输出,而不是使用 cvimodel 输出(logits)
C++ 代码结构
hand_gesture/
├── main/
│ ├── main.cpp # Entry: get frame → mmap → inference → UDP push
│ ├── hand_detector.{h,cpp} # Model 1: palm detection (SSD post-processing + NMS)
│ ├── hand_landmarker.{h,cpp} # Model 2: 21 landmarks (ROI warpAffine)
│ ├── gesture_recognizer.{h,cpp}# Model 3+4: embedder + classifier (with softmax patch)
│ ├── gesture_math.{h,cpp} # letterbox / math utilities
│ ├── engine_utils.h # tensor packing helpers
│ └── hand_types.h # data structures + UDP POD protocol
├── tools/udp_receiver.py # Python host receiver
└── CMakeLists.txt
技术支持与产品讨论
感谢你选择我们的产品!我们将为你提供多种支持,确保你在使用我们产品的过程中尽可能顺利。我们提供多种沟通渠道,以满足不同的偏好和需求。