转换和量化 AI 模型

reCamera 的 AI 模型转换工具目前支持 PyTorch、ONNX、TFLite 和 Caffe 等框架。来自其他框架的模型需要转换为 ONNX 格式。有关如何将其他深度学习架构的模型转换为 ONNX 的说明,您可以参考 ONNX 官方网站:https://github.com/onnx/tutorials。
在 reCamera 上部署 AI 模型的流程图如下所示。
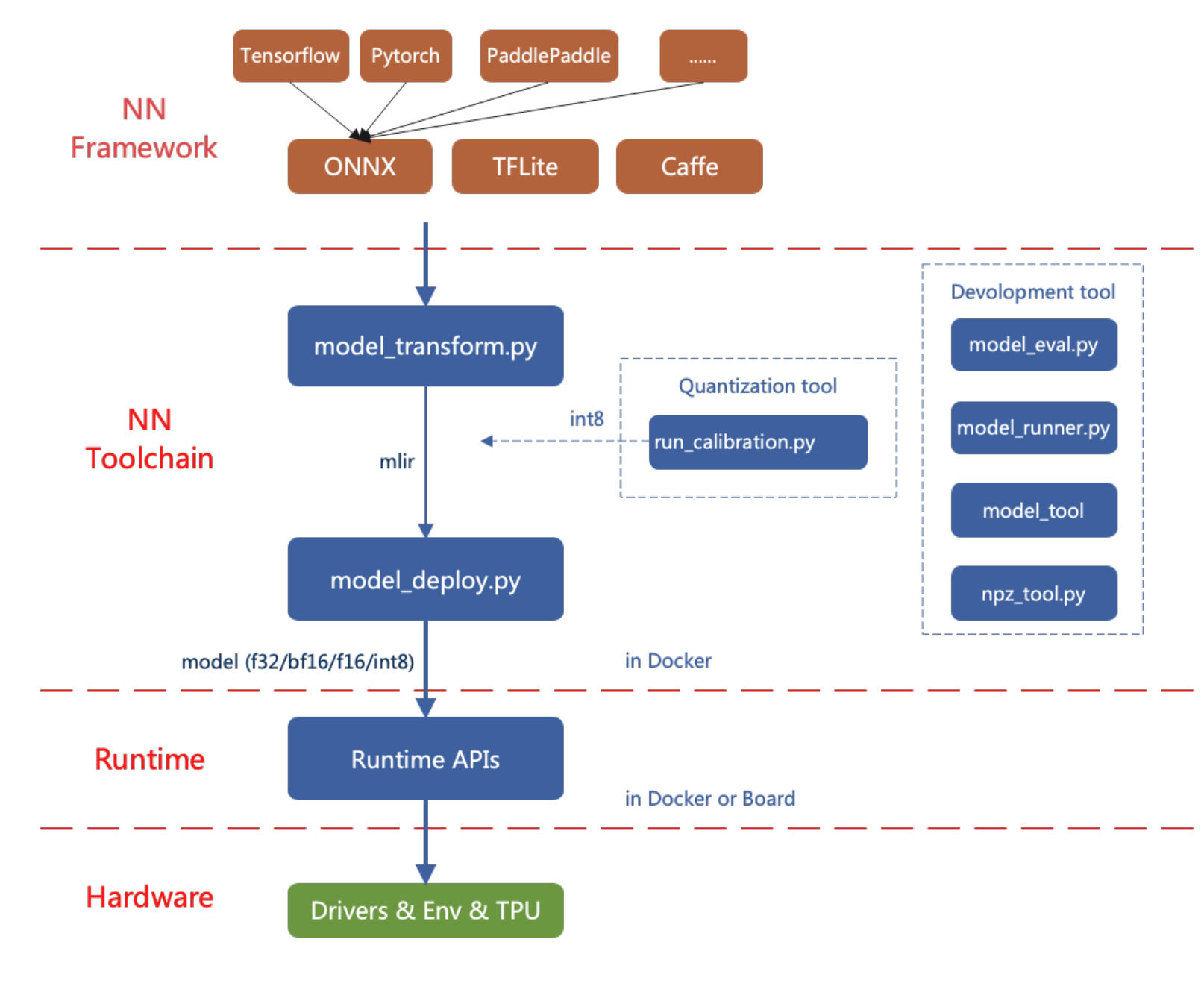
本文通过简单的示例介绍如何使用 reCamera 的 AI 模型转换工具。
设置工作环境
方法 1:在 Docker 镜像中安装(推荐)
从 DockerHub(点击这里) 下载所需的镜像,我们推荐使用 版本 3.1:
docker pull sophgo/tpuc_dev:v3.1
如果您是第一次使用 Docker,可以运行以下命令进行安装和配置(仅在首次设置时需要):
sudo apt install docker.io
sudo systemctl start docker
sudo systemctl enable docker
sudo groupadd docker
sudo usermod -aG docker $USER
newgrp docker
然后在当前目录下按如下方式创建一个容器:
docker run --privileged --name MyName -v $PWD:/workspace -it sophgo/tpuc_dev:v3.1
** 将 "MyName" 替换为您容器所需的名称*
在 Docker 容器内使用 pip 安装 tpu_mlir,就像在 方法 1 中一样:
pip install tpu_mlir[all]==1.7
方法 2:本地安装
首先检查当前系统环境是否满足:
如果不满足或安装失败,选择方法 2来安装模型转换工具。
使用pip安装tpu_mlir:
pip install tpu_mlir==1.7
tpu_mlir 所需的依赖项在处理来自不同框架的模型时会有所不同。对于由 ONNX 或 Torch 生成的模型文件,请使用以下命令安装额外的依赖项:
pip install tpu_mlir[onnx]==1.7
pip install tpu_mlir[torch]==1.7
目前支持五种配置:onnx、torch、tensorflow、caffe 和 paddle。或者您可以使用以下命令安装所有依赖项:
pip install tpu_mlir[all]==1.7
当本地已经存在 tpu_mlir-{version}.whl 文件时,您也可以使用以下命令进行安装:
pip install path/to/tpu_mlir-{version}.whl[all]
将 AI 模型转换和量化为 cvimodel 格式
准备 ONNX
reCamera 已经适配了 YOLO 系列进行本地推理。因此,本节使用 yolo11n.onnx 作为示例来演示如何将 ONNX 模型转换为 cvimodel。
cvimodel 是 reCamera 上用于本地推理的 AI 模型格式。
转换和量化 PyTorch、TFLite 和 Caffe 模型的方法与本节相同。
这里是 yolo11n.onnx 的下载链接。您可以点击链接下载模型并将其复制到您的 Workspace 中以供进一步使用。
下载模型: 下载 yolo11n.onnx 此 ONNX 文件可以直接用于以下章节的示例,无需修改 IR 版本或 Opset 版本。
目前,本 wiki 中的 ONNX 基于 IR 版本 8 和 Opset 版本 17。如果您的 ONNX 文件是在 2024 年 12 月之后由 Ultralytics 示例转换而来,它可能会在后续过程中由于版本过高而出现问题。
您可以使用 Netron 查看 ONNX 文件的信息:
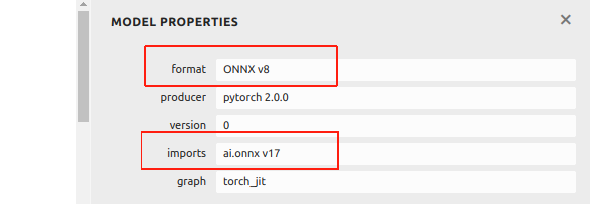
如果您的 ONNX 文件高于 IR v8 和 Opset v17,我们在这里提供一个示例来帮助您降级它。 首先,通过 pip 安装 onnx:
pip install onnx
从 GitHub 拉取用于修改 ONNX 文件版本的程序:
git clone https://github.com/jjjadand/ONNX_Downgrade.git
cd ONNX_Downgrade/
通过在命令行参数中提供输入和输出模型文件路径来运行该脚本:
python downgrade_onnx.py <input_model_path> <output_model_path> --target_ir_version <IR_version> --target_opset_version <Opset_version>
<input_model_path>:您想要降级的原始 ONNX 模型的路径。<output_model_path>:降级后的模型将保存的路径。- --target_ir_version
<IR_version>:可选。要降级到的目标 IR 版本。默认为 8。 - --target_opset_version
<Opset_version>:可选。要降级到的目标 Opset 版本。默认为 17。
例如,使用默认版本(IR v8,Opset v17):
python downgrade_onnx.py model_v12.onnx model_v8.onnx
这将加载 model_v12.onnx,将其降级到 IR 版本 8,设置 opset 版本 17,验证,并将新模型保存为 model_v8.onnx。
使用自定义版本(IR v9,Opset v11):
python downgrade_onnx.py model_v12.onnx model_v9.onnx --target_ir_version 9 --target_opset_version 11
这将加载 model_v12.onnx,将其降级到 IR 版本 9,设置 opset 版本 11,验证并将新模型保存为 model_v9.onnx。
- 为避免错误,我们建议使用 IR v8 和 Opset v17 的 ONNX。
准备工作空间
在与 tpu-mlir 相同级别创建 model_yolo11n 目录。图像文件通常是模型训练数据集的一部分,用于后续量化过程中的校准。
在终端中输入以下命令:
git clone -b v1.7 --depth 1 https://github.com/sophgo/tpu-mlir.git
cd tpu-mlir
source ./envsetup.sh
./build.sh
mkdir model_yolo11n && cd model_yolo11n
cp -rf ${REGRESSION_PATH}/dataset/COCO2017 .
cp -rf ${REGRESSION_PATH}/image .
mkdir Workspace && cd Workspace
获得可用的 ONNX 文件后,将其放置在您创建的 Workspace 目录中。目录结构如下:
model_yolo11n
├── COCO2017
├── image
└── Workspace
└──yolo11n.onnx
后续步骤将在您的 Workspace 中执行。
ONNX 转 MLIR
从 ONNX 转换到 MLIR 是模型转换过程中的中间步骤。在获得适合在 reCamera 上推理的模型之前,您需要首先将 ONNX 模型转换为 MLIR 格式。这个 MLIR 文件作为桥梁,用于生成针对 reCamera 推理引擎优化的最终模型。
如果输入是图像,我们需要在转换之前了解模型的预处理。如果模型使用预处理的 npz 文件作为输入,则无需考虑预处理。预处理过程的公式如下(x 表示输入):
y = (x − mean) × scale
yolo11 的归一化范围是 [0, 1],官方 yolo11 的图像是 RGB 格式。每个值都会乘以 1/255,在转换为 mean 和 scale 时分别对应 0.0, 0.0, 0.0 和 0.0039216, 0.0039216, 0.0039216。mean 和 scale 的参数因模型而异,因为它们由每个特定模型使用的归一化方法决定。
您可以参考以下在终端中的模型转换命令:
model_transform \
--model_name yolo11n \
--model_def yolo11n.onnx \
--input_shapes "[[1,3,640,640]]" \
--mean "0.0,0.0,0.0" \
--scale "0.0039216,0.0039216,0.0039216" \
--keep_aspect_ratio \
--pixel_format rgb \
--output_names "/model.23/cv2.0/cv2.0.2/Conv_output_0,/model.23/cv3.0/cv3.0.2/Conv_output_0,/model.23/cv2.1/cv2.1.2/Conv_output_0,/model.23/cv3.1/cv3.1.2/Conv_output_0,/model.23/cv2.2/cv2.2.2/Conv_output_0,/model.23/cv3.2/cv3.2.2/Conv_output_0" \
--test_input ../image/dog.jpg \
--test_result yolo11n_top_outputs.npz \
--mlir yolo11n.mlir
转换为 mlir 文件后,将生成一个 ${model_name}_in_f32.npz 文件,这是后续模型的输入文件。
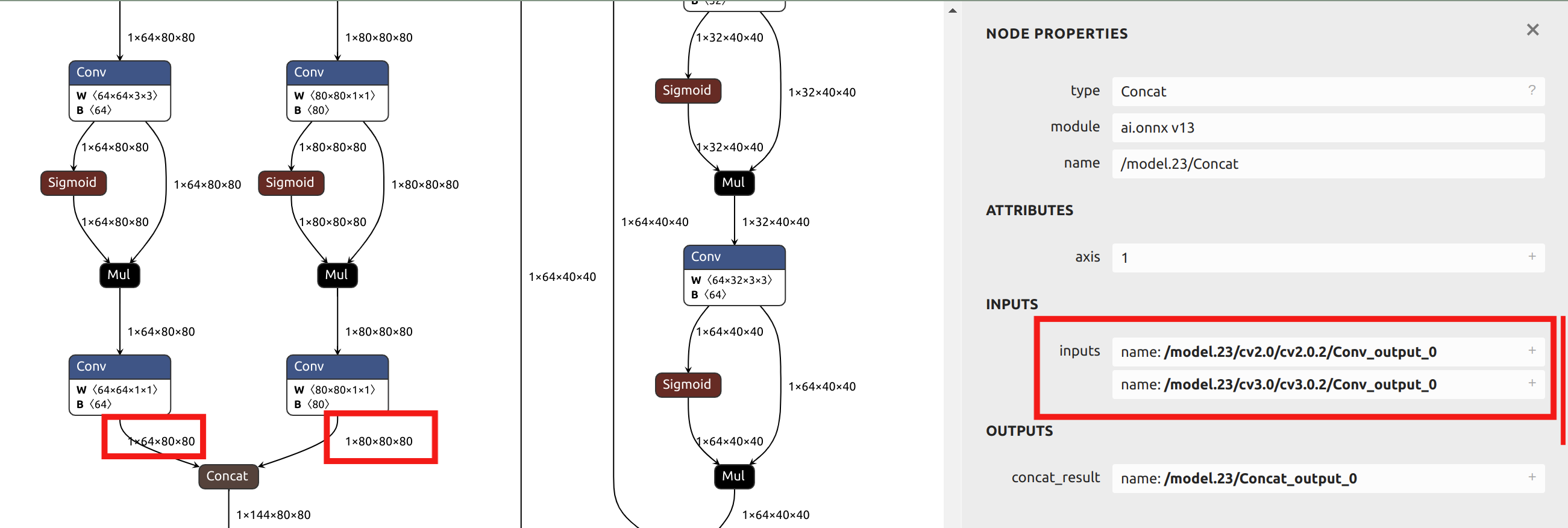
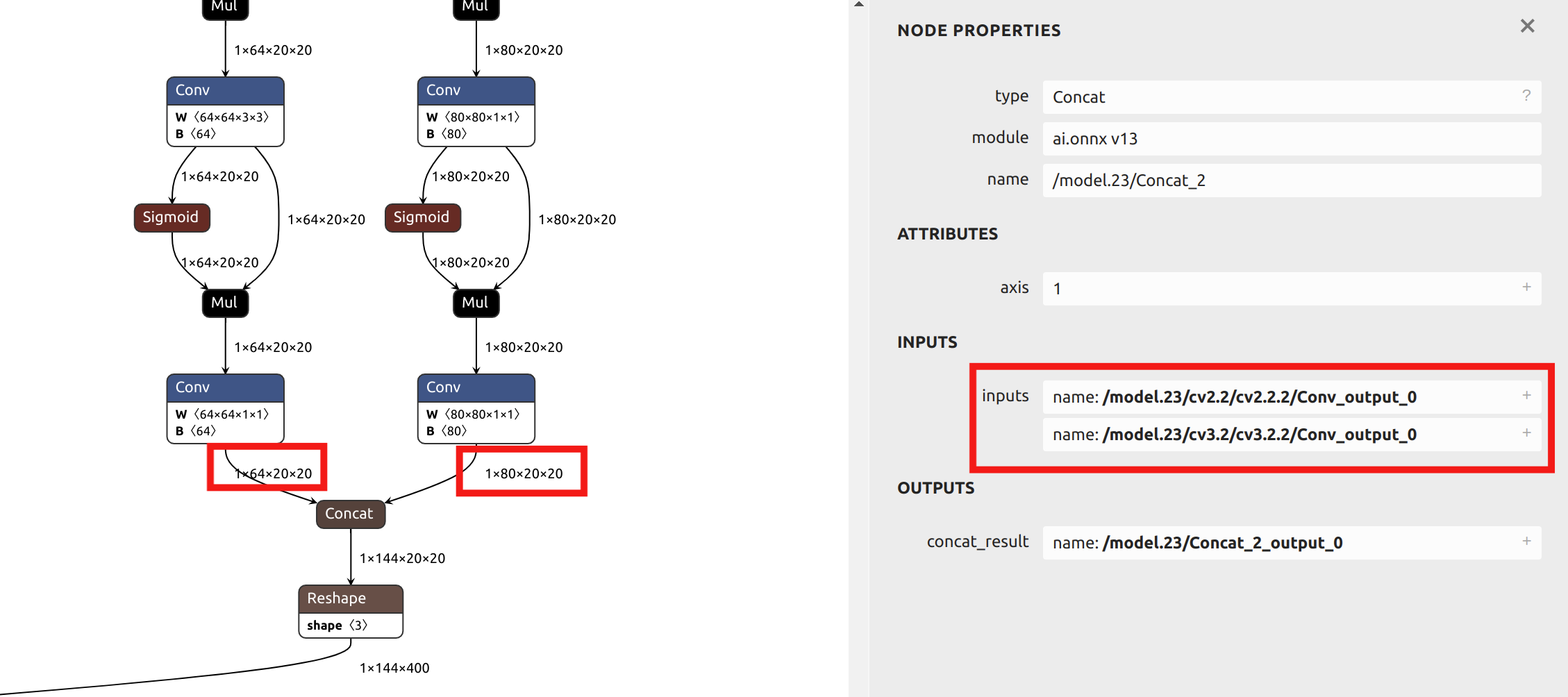
关于 --output_names 参数的选择,本示例中的 YOLO11 模型转换没有选择名为 output0 的最终输出。相反,它选择了模型头部之前的六个输出作为参数。您可以将 ONNX 文件导入 Netron 来查看模型结构。
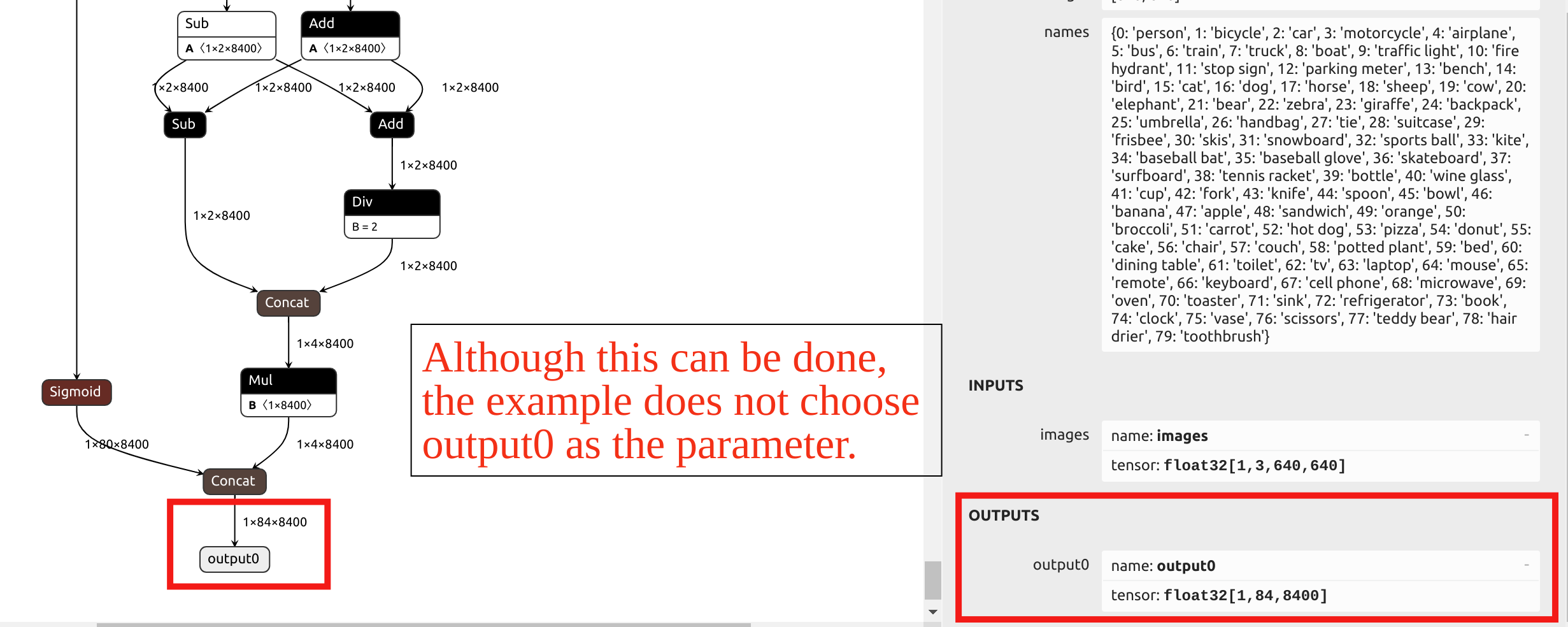
YOLO 头部 中的算子在 INT8 量化后精度非常低。如果选择最末端的 output0 作为参数,则需要混合精度量化。
由于本文后续章节将提供混合精度量化的示例,而本节使用单一量化精度作为示例,因此选择 头部 之前的输出作为参数。通过在 Netron 中可视化 ONNX 模型,您可以看到六个输出名称的位置:
model_transform 主要参数说明:
| 参数名称 | 是否必需? | 描述 |
|---|---|---|
| model_name | 是 | 指定模型名称。 |
| model_def | 是 | 指定模型定义文件,如 '.onnx'、'.tflite' 或 '.prototxt'。 |
| input_shapes | 否 | 指定输入形状,例如 [[1,3,640,640]]。一个二维数组,可以支持多个输入。 |
| input_types | 否 | 指定输入类型,如 int32。使用逗号分隔多个输入。默认为 float32。 |
| resize_dims | 否 | 指定原始图像应调整到的尺寸。如果未指定,将调整到模型的输入尺寸。 |
| keep_aspect_ratio | 否 | 调整尺寸时是否保持纵横比。默认为 false;如果为 true,缺失区域将使用零填充。 |
| mean | 否 | 图像每个通道的均值。默认为 0,0,0,0。 |
| scale | 否 | 图像每个通道的缩放值。默认为 1.0,1.0,1.0。 |
| pixel_format | 否 | 图像类型,可以是 'rgb'、'bgr'、'gray' 或 'rgbd' 之一。默认为 'bgr'。 |
| channel_format | 否 | 图像输入的通道类型,可以是 'nhwc' 或 'nchw'。对于非图像输入,使用 'none'。默认为 'nchw'。 |
| output_names | 否 | 指定输出名称。如果未指定,使用模型的默认输出名称。 |
| test_input | 否 | 指定用于验证的输入文件,如图像、npy 或 npz 文件。如果未指定,不执行精度验证。 |
| test_result | 否 | 指定验证结果的输出文件。 |
| excepts | 否 | 指定要从验证中排除的网络层,用逗号分隔。 |
| mlir | 是 | 指定输出 MLIR 文件名和路径。 |
MLIR 转 F16 cvimodel
如果您想从 mlir 转换为 F16 精度的 cvimodel,可以在终端中输入以下参考命令:
model_deploy \
--mlir yolo11n.mlir \
--quant_input \
--quantize F16 \
--customization_format RGB_PACKED \
--processor cv181x \
--test_input ../image/dog.jpg \
--test_reference yolo11n_top_outputs.npz \
--fuse_preprocess \
--tolerance 0.99,0.9 \
--model yolo11n_1684x_f16.cvimodel
转换成功后,您将获得一个FP16精度的cvimodel文件,可以直接用于推理。如果您需要INT8精度或混合精度的cvimodel文件,请参考以下文章后续章节的内容。
model_deploy主要参数说明:
| 参数名称 | 是否必需? | 描述 |
|---|---|---|
| mlir | 是 | MLIR文件 |
| quantize | 是 | 量化类型(F32/F16/BF16/INT8) |
| processor | 是 | 取决于所使用的平台。2024版本的reCamera选择"cv181x"作为参数。 |
| calibration_table | 否 | 校准表路径。INT8量化时必需 |
| tolerance | 否 | MLIR量化和MLIR fp32推理结果之间最小相似度的容差 |
| test_input | 否 | 用于验证的输入文件,可以是图像、npy或npz。如果未指定,将不进行验证 |
| test_reference | 否 | 用于验证mlir容差的参考数据(npz格式)。它是每个算子的结果 |
| compare_all | 否 | 如果设置,比较所有张量 |
| excepts | 否 | 需要从验证中排除的网络层名称。用逗号分隔 |
| op_divide | 否 | 尝试将较大的op分割成多个较小的op以达到节省ion内存的目的,适用于少数特定模型 |
| model | 是 | 输出模型文件名称(包括路径) |
| skip_validation | 否 | 跳过cvimodel正确性验证以提高部署效率;默认开启cvimodel验证 |
编译后,会生成一个名为 yolo11n_1684x_f16.cvimodel 的文件。量化模型可能会有轻微的精度损失,但会更加轻量化并具有更快的推理速度。
MLIR 转 INT8 cvimodel
校准表生成
在转换为 INT8 模型之前,您需要运行校准以获取校准表。
输入数据的数量根据情况约为 100 到 1000 个。
然后使用校准表生成对称或非对称的 cvimodel。如果对称模型已经满足要求,通常不建议使用非对称模型,因为非对称模型的性能会比对称模型稍差。
以下是使用来自 COCO2017 的现有 100 张图像进行校准的示例:
run_calibration \
yolo11n.mlir \
--dataset ../COCO2017 \
--input_num 100 \
-o yolo11n_calib_table
运行上述命令后,将生成一个名为 yolo11n_calib_table 的文件,该文件用作后续编译 INT8 模型的输入文件。
run_calibration 主要参数说明:
| 参数 | 是否必需? | 描述 |
|---|---|---|
| N/A | 是 | 指定 MLIR 文件 |
| dataset | 否 | 指定输入样本目录,路径中包含对应的图像、npz 或 npy 文件 |
| data_list | 否 | 指定样本列表;dataset 或 data_list 必须选择其中一个 |
| input_num | 否 | 指定校准样本数量;如果设置为 0,则使用所有样本 |
| tune_num | 否 | 指定调优样本数量;默认为 10 |
| histogram_bin_num | 否 | 直方图的 bin 数量;默认为 2048 |
| o | 是 | 输出校准表文件 |
编译为 INT8 对称量化 cvimodel
获得 yolo11n_cali_table 文件后,运行以下命令将其转换为 INT8 对称量化模型:
model_deploy \
--mlir yolo11n.mlir \
--quantize INT8 \
--quant_input \
--processor cv181x \
--calibration_table yolo11n_calib_table \
--test_input ../image/dog.jpg \
--test_reference yolo11n_top_outputs.npz \
--customization_format RGB_PACKED \
--fuse_preprocess \
--aligned_input \
--model yolo11n_1684x_int8_sym.cvimodel
编译后,会生成一个名为 yolo11n_1684x_int8_sym.cvimodel 的文件。量化为 INT8 的模型相比量化为 F16/BF16 的模型更加轻量,推理速度也更快。
快速测试
您可以使用 reCamera 上的 Node-RED 进行可视化,快速验证转换后的 yolo11n_1684x_int8_sym.cvimodel。只需设置几个节点,如下面的示例视频所示:
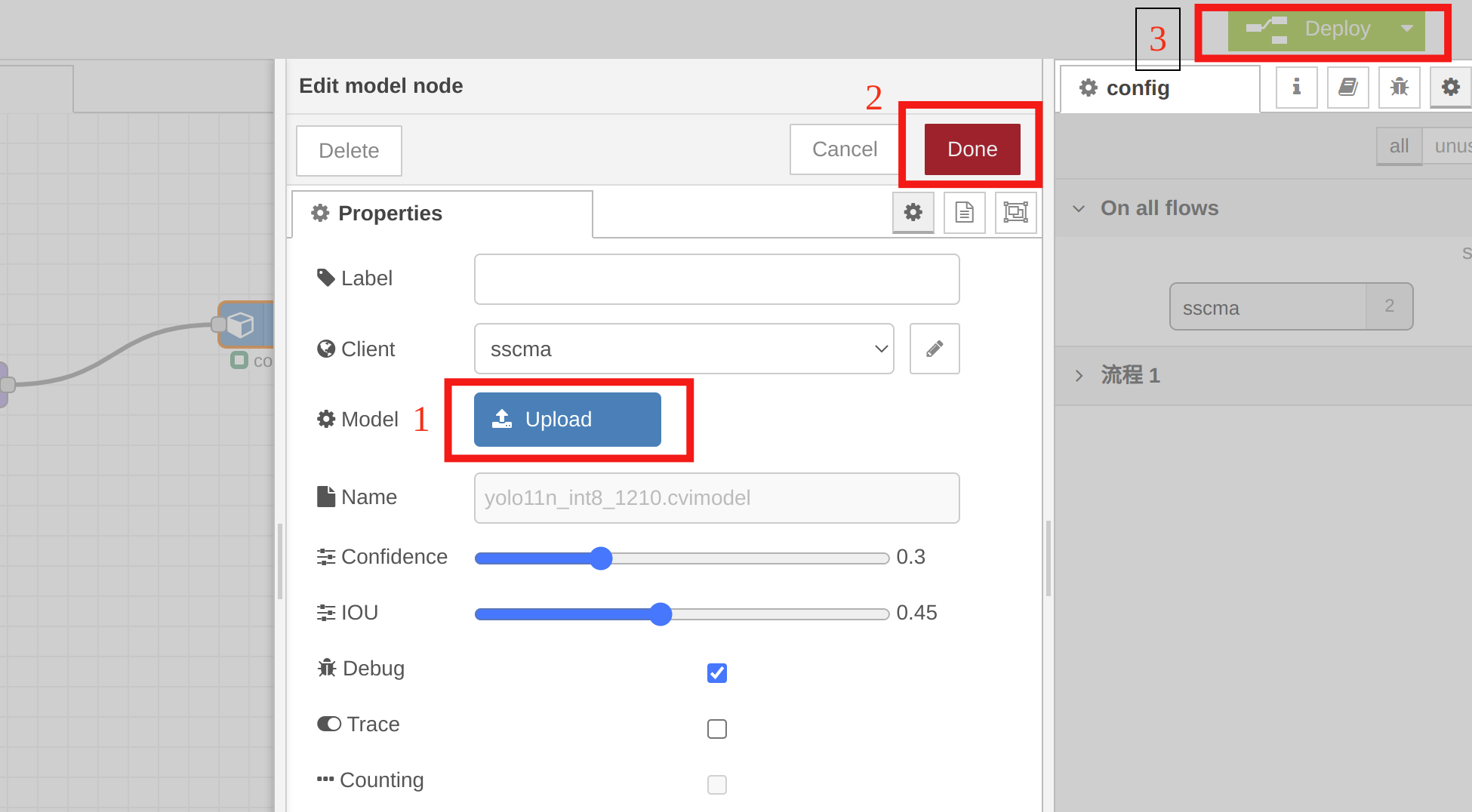
您需要在 model 节点中选择 yolo11n_1684x_int8_sym.cvimodel 进行快速验证。双击模型节点,点击 "Upload" 导入量化模型,然后点击 "Done",最后点击 "Deploy"。
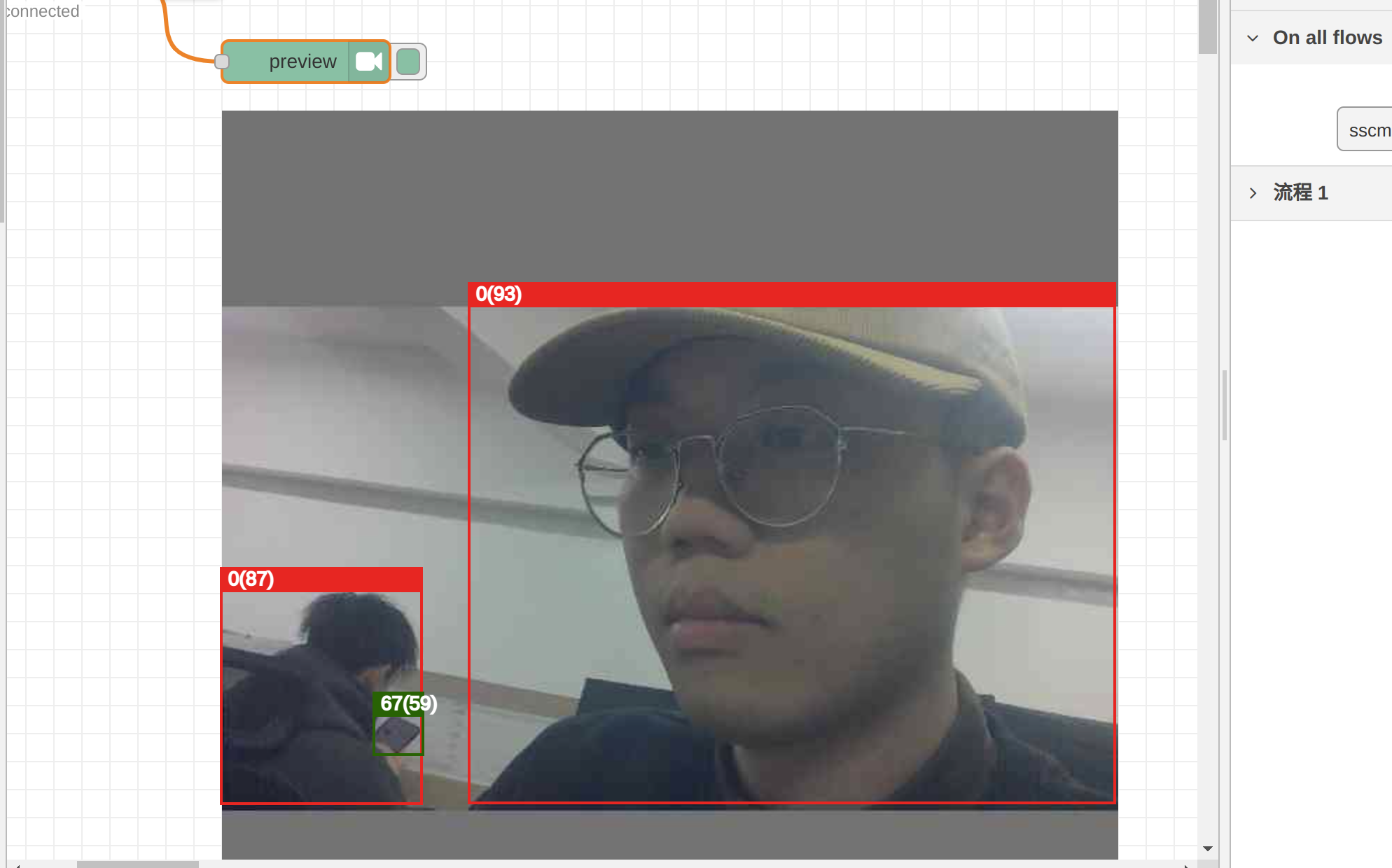
我们可以在 preview 节点中查看 INT8 量化模型的推理结果。通过正确的转换和量化方法获得的 cvimodel 仍然是可靠的:
目前,reCamera 的 Node-RED 仅支持有限数量模型的预览测试。未来我们将适配更多模型。如果您将自定义模型导入 Node-RED 或未按照我们示例中所示设置指定的输出张量,Node-RED 的后端不支持预览测试,即使您的 cvimodel 是正确的。
我们将发布各种模型的预处理和后处理教程,这样您就可以编写自己的代码来推理您的自定义 cvimodel。
混合精度量化
当模型中某些层的精度容易受到量化影响,但我们仍然需要更快的推理速度时,单一精度量化可能不再适用。在这种情况下,混合精度量化可以更好地解决这种情况。对于对量化更敏感的层,我们可以选择 F16/BF16 量化,而对于精度损失最小的层,我们可以使用 INT8。
接下来,我们将以 yolov5s.onnx 为例,演示如何快速转换和量化模型为混合精度 cvimodel。在阅读本节之前,请确保您已经阅读了文章的前面部分,因为本节的操作建立在之前内容的基础上。
这里是 yolov5s.onnx 的下载链接。您可以点击链接下载模型并将其复制到您的工作空间以供进一步使用。
下载模型: 下载 yolov5s.onnx
下载模型后,请将其放入您的 workspace 中以进行下一步操作。
mkdir model_yolov5s && cd model_yolov5s
cp -rf ${REGRESSION_PATH}/dataset/COCO2017 .
cp -rf ${REGRESSION_PATH}/image .
mkdir workspace && cd workspace
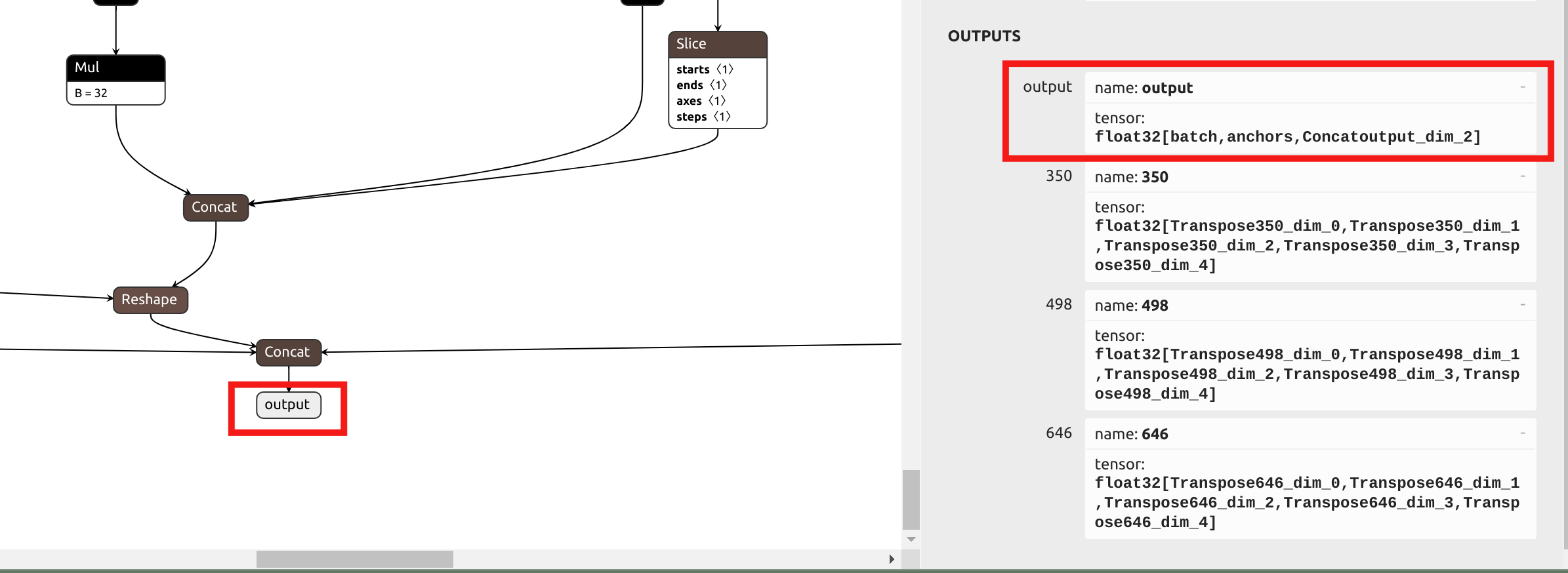
第一步仍然是将模型转换为 .mlir 文件。由于在使用混合精度量化时,YOLO 的 head 中的精度损失很小,与之前的方法不同,我们将在 --output_names 参数中选择最终输出名称,而不是 head 之前的输出。在 Netron 中可视化 ONNx:
由于 yolov5 的归一化参数与 yolo11 的相同,我们可以获得以下 model_transform 命令:
model_transform \
--model_name yolov5s \
--model_def yolov5s.onnx \
--input_shapes [[1,3,640,640]] \
--mean 0.0,0.0,0.0 \
--scale "0.0039216,0.0039216,0.0039216" \
--keep_aspect_ratio \
--pixel_format rgb \
--output_names output \
--test_input ../image/dog.jpg \
--test_result yolov5s_top_outputs.npz \
--mlir yolov5s.mlir
然后我们还需要生成校准表,这一步与前一部分中的步骤相同:
run_calibration \
yolov5s.mlir \
--dataset ../COCO2017 \
--input_num 100 \
-o yolov5s_calib_table
与我们转换 int8 对称量化 yolo11 模型的部分不同,在执行 model_deploy 之前,我们需要生成一个混合精度量化表。参考命令如下:
run_qtable \
yolov5s.mlir \
--dataset ../COCO2017 \
--calibration_table yolov5s_calib_table \
--processor cv181x \
--min_layer_cos 0.99 \
--expected_cos 0.999 \
-o yolov5s_qtable
run_qtable 的参数描述如下表所示:
| 参数 | 是否必需? | 描述 |
|---|---|---|
| N/A | 是 | 指定 MLIR 文件 |
| dataset | 否 | 指定输入样本目录,包含图像、npz 或 npy 文件 |
| data_list | 否 | 指定样本列表;必须选择 dataset 或 data_list 中的一个 |
| calibration_table | 是 | 输入校准表 |
| processor | 是 | 取决于所使用的平台。2024 版本的 reCamera 选择 "cv181x" 作为参数。 |
| fp_type | 否 | 指定混合精度的浮点精度类型,支持 auto、F16、F32、BF16;默认为 auto |
| input_num | 否 | 指定输入样本数量;默认为 10 |
| expected_cos | 否 | 指定最终网络输出层的最小期望余弦相似度;默认为 0.99 |
| min_layer_cos | 否 | 指定每层输出的最小余弦相似度;低于此阈值的值将使用浮点计算;默认为 0.99 |
| debug_cmd | 否 | 指定用于开发的调试命令字符串;默认为空 |
| global_compare_layers | 否 | 指定用于最终输出比较的替换层,例如 'layer1,layer2' 或 'layer1:0.3,layer2:0.7' |
| loss_table | 否 | 指定保存所有层量化为浮点类型的损失值的文件名;默认为 full_loss_table.txt |
在每一层的前驱层基于其 cos 转换为相应的浮点模式后,会检查该层计算的 cos 值。如果 cos 仍然小于 min_layer_cos 参数,当前层及其直接后继层将被设置为使用浮点运算。
run_qtable 在将每对相邻层设置为使用浮点计算后,重新计算整个网络输出的 cos。如果 cos 超过指定的 expected_cos 参数,搜索将终止。因此,设置更大的 expected_cos 将导致更多层尝试浮点运算。
最后,运行 model_deploy 以获得混合精度 cvimodel:
model_deploy \
--mlir yolov5s.mlir \
--quantize INT8 \
--quantize_table yolov5s_qtable \
--calibration_table yolov5s_calib_table \
--customization_format RGB_PACKED \
--fuse_preprocess \
--aligned_input \
--processor cv181x \
--model yolov5s_mix-precision.cvimodel
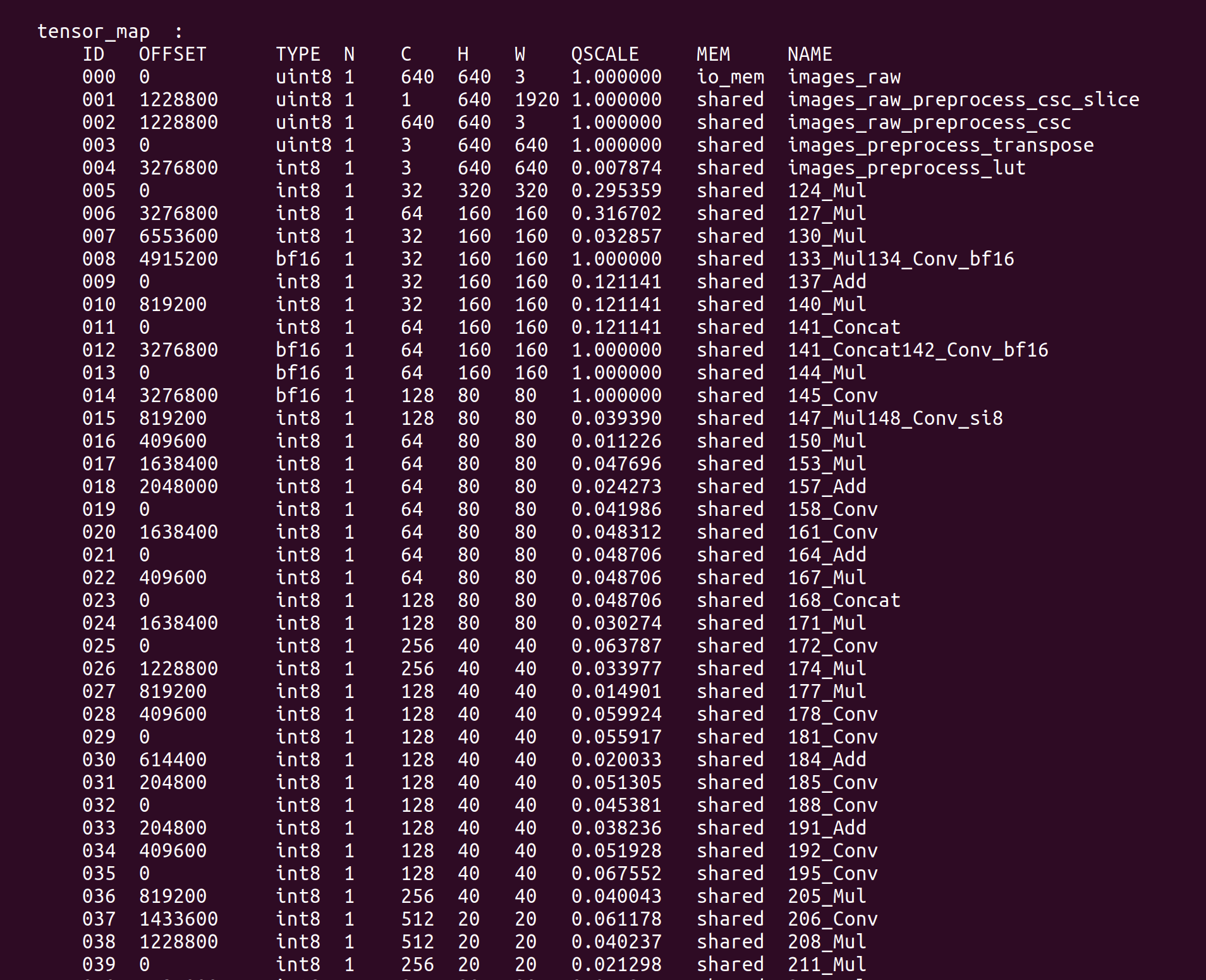
在获得 yolov5s_mix-precision.cvimodel 后,我们可以使用 model_tool 查看该模型的详细信息:
model_tool --info yolov5s_mix-precision.cvimodel
关键信息如 TensorMap 和 WeightMap 将被打印到终端:
我们可以在 reCamera 中运行一个示例来验证混合精度量化的 YOLOv5 模型。拉取编译的测试示例:
git clone https://github.com/jjjadand/yolov5_Test_reCamera.git
使用 FileZilla 等软件将编译好的示例和 yolov5s_mix-precision.cvimodel 复制到 reCamera。(您可以查看 reCamera 入门指南)
复制完成后,在 recamera 终端中运行命令:
cp /path/to/yolov5s_mix-precision.cvimodel /path/to/yolov5_Test_reCamera/solutions/sscma-model/build/
cd yolov5_Test_reCamera/solutions/sscma-model/build/
sudo ./sscma-model yolov5s_mix-precision.cvimodel Dog.jpg Out.jpg
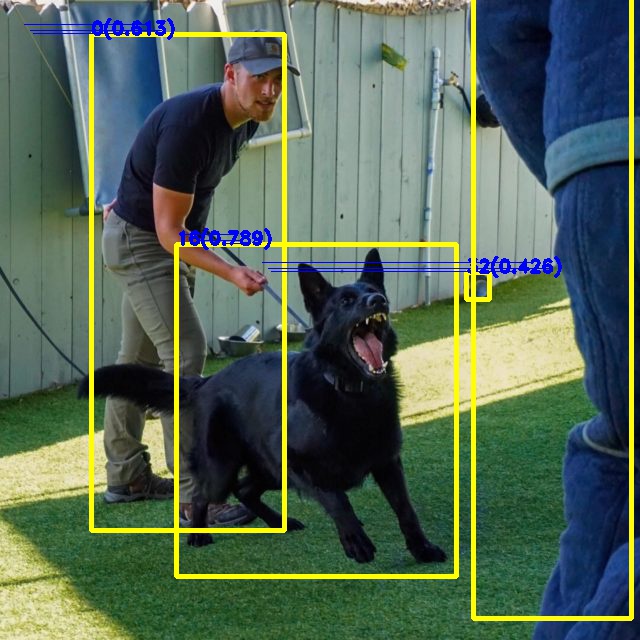
预览 Out.jog,mixed-precision 量化的 yolov5 模型推理结果如下:
资源
技术支持与产品讨论
感谢您选择我们的产品!我们在这里为您提供不同的支持,以确保您使用我们产品的体验尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。