在reCamera上本地部署龙虾
1.介绍
相信很多人都会遇到想在reCamera上实现自己的想法,但是苦于不会编写相应的程序导致诸多想法无法实现,虽然我们有对新手及其友好的node-red供其使用,但是其功能相对简单,无法满足复杂的需求。所以为了满足这些需求,我们提供了在reCamera上本地部署龙虾的案例。有了龙虾你就可以让龙虾帮你写代码和调试设备,完全不需要自己动手。当然它不仅仅能帮你写代码,还能直接控制板载的硬件模块。有更多的玩法去等待你的开发!!
2.硬件准备
- 一台 reCamera Gimbal
- 一台电脑
| reCamera Gimbal |
|---|
 |
3.效果演示
3.1 让Gimbal环顾周围环境
3.2 通过自然语言控制板载硬件--控制LED灯
3.3 让Agent自己写脚本并且运行
4.部署教程
由于 openclaw 运行所需要的内存较大(>=2GB),所以我们选择部署一款轻量的龙虾,即 picoclaw,仅需10MB内存就能运行,所以十分适合本项目使用。
4.1 下载picoclaw的源码的源码
点击链接下载picoclaw的源码压缩包(支持riscv64架构的reCamera):picoclaw的源码压缩包
4.2 SSH连接到reCamera
连接到reCamera后输入如下命令接入 userdata 目录,创建一个文件夹存放picoclaw的源码。
ssh recamera@reCamera的ip地址
cd /userdata
mkdir picoclaw
4.3 上传源码压缩包到reCamera
上传picoclaw的源码压缩包到reCamera的 /userdata/picoclaw/ 文件夹下。
scp picoclaw_Linux_riscv64.tar.gz recamera@reCamera的ip地址:/userdata/picoclaw
4.4 解压源码压缩包
在reCamera上输入如下命令解压picoclaw的源码压缩包。
tar -axvf picoclaw_Linux_riscv64.tar.gz
4.5 启动picoclaw的web ui端
在reCamera上输入如下命令启动picoclaw的web ui端。
./picoclaw-launcher -no-browser -public
在服务启动后,打开浏览器访问 http://reCamera的ip地址:18800 即可,如下图所示。
5.配置picoclaw大模型
在web ui端设置好密码后,按照如下步骤去配置picoclaw的大模型。
5.1 左侧边栏找到 模型 选项,点击进入。
5.2 下滑找到 deepseek-chat 模型,点击 编辑 按钮,如下图所示。
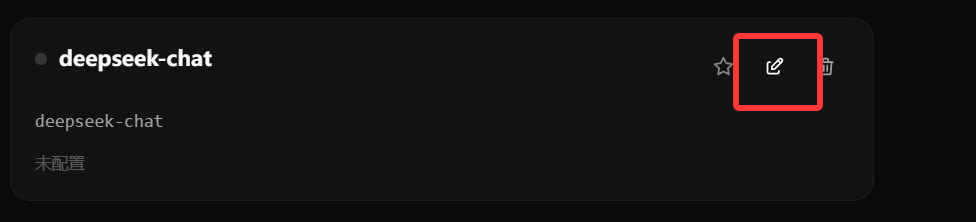
5.3 在API-KEY输入框中输入你的API Key,点击 保存 按钮,保存配置。
5.4 配置成功后,点击右上角的启动服务按钮即可启动模型。

5.5 点击左侧的对话选项,即可与模型进行对话。
6.接入QQ机器人
在web ui端设置好密码后,按照如下步骤去接入QQ机器人。
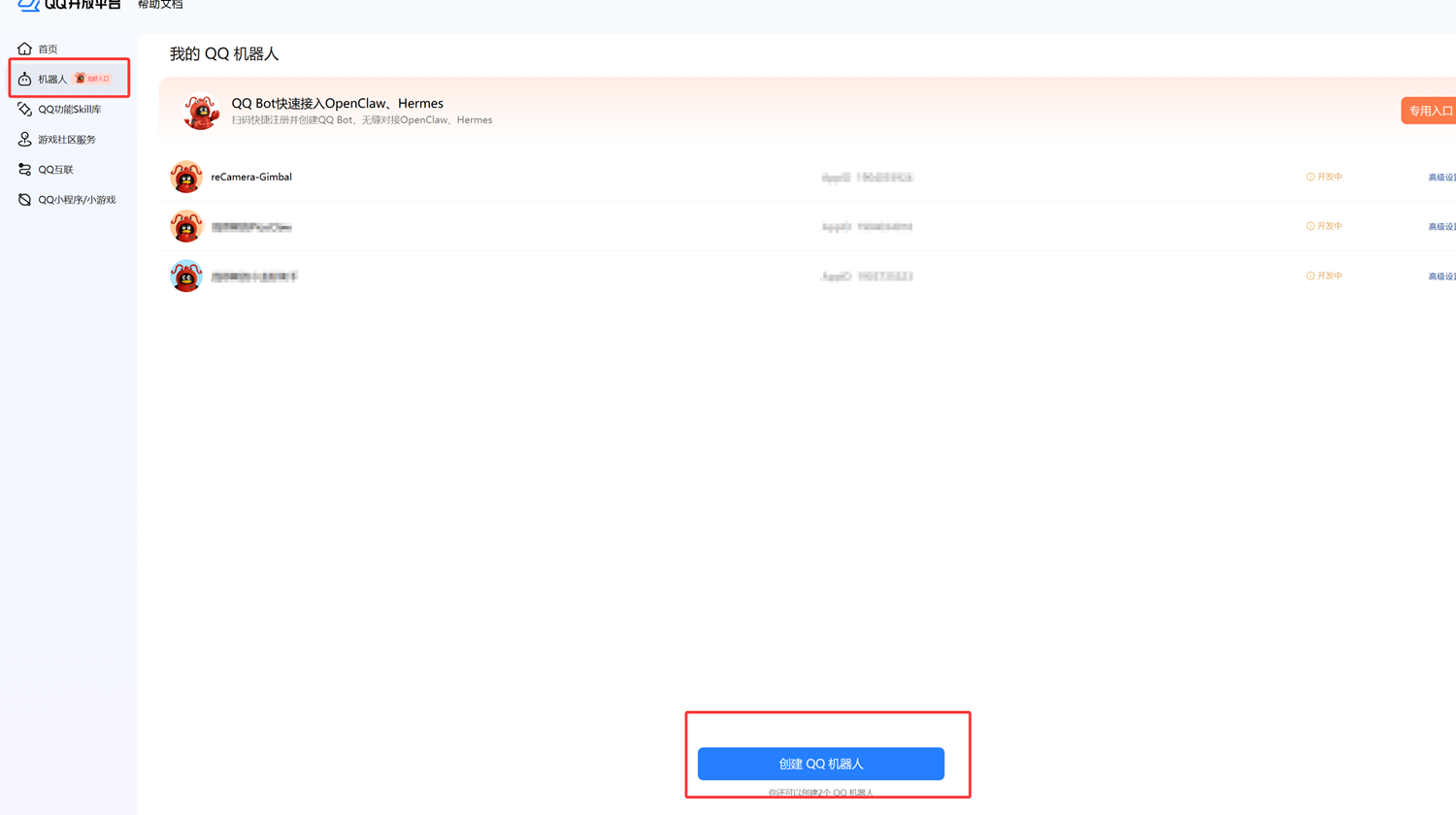
6.1 首先去QQ开放平台,然后登录你自己的QQ账号。
6.2 点击左侧的机器人选项,点击 创建机器人 按钮,如下图所示。
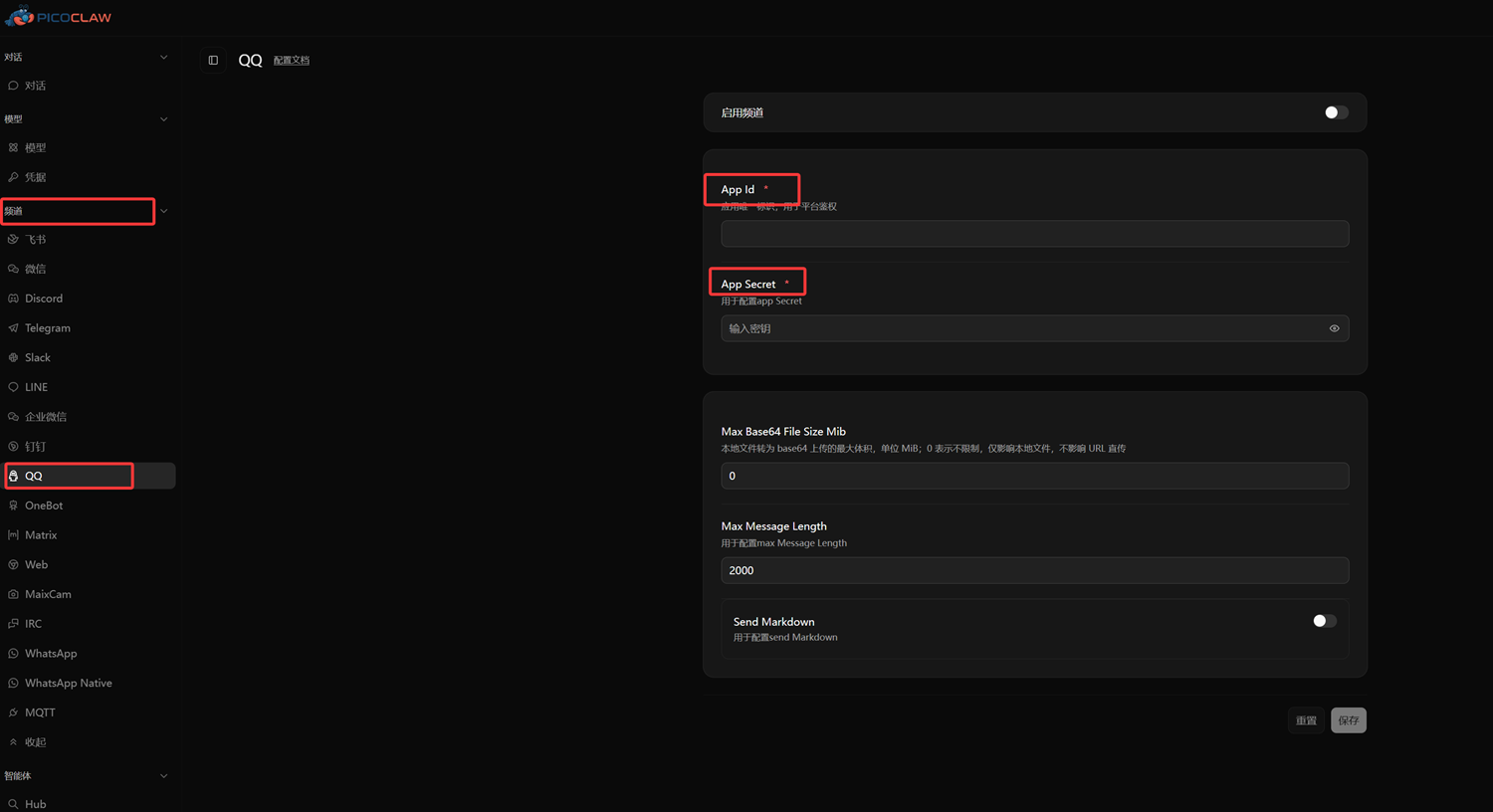
6.3 创建完毕机器人后,按照教程配置好机器人并且获取到对应的机器人ID和密钥后,回到web ui端,找到左侧的频道选项,下拉找到QQ,然后点击接入填写ID和密钥点击保存即可。
7.创建自己的skill
在/home/recamera目录下面,你可以找到 .picoclaw 这个文件夹,进入文件夹后,你可以找到 workspace 然后里面有一个skill 文件夹,这个文件夹就是你创建自己的skill的地方。
7.1 创建 skill格式
skill-name/
├── SKILL.md # 必需 - 技能主文件
├── scripts/ # 可选 - 可执行脚本
├── references/ # 可选 - 参考文档(按需加载)
└── assets/ # 可选 - 输出用资源文件(模板、图片等)
8.导入reCamera的skill
我们做了几个简单的skill,专门用来适配reCamera--->skill链接
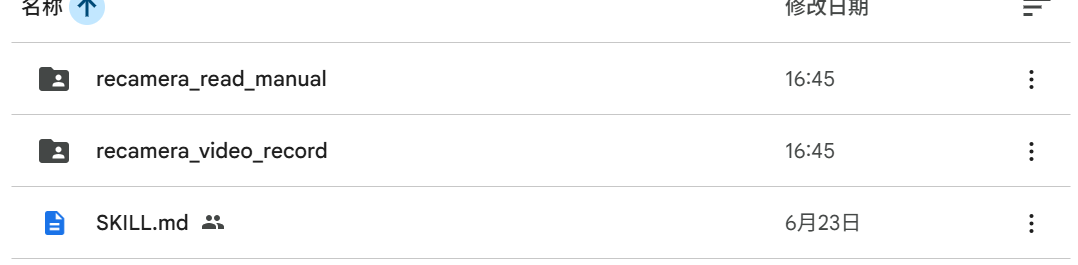
你会看到有下图的三个文件:
-
recamera_read_manual 读取reCamera硬件资源,类似于reCamera的知识库,这个放到skill文件夹下即可。
-
recamera_video_record 一个可以拍视频和拍图片的skill(基于node-red实现),这个放到skill文件夹下即可。
-
SKILL.md 主文件,描述reCamera Gimbal整体硬件资源,这个放到***/skill/hardware***下面覆盖原文件即可
技术支持与产品讨论
感谢你选择我们的产品!我们为你提供多种支持方式,以确保你在使用我们产品的过程中尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。