在reComputer上实现Ethercat通信

EtherCAT(用于控制自动化技术的以太网)是一种高性能、开源的工业以太网协议,专为自动化、机器人和运动系统中的实时自动化控制而设计。本wiki将向您展示如何在reComputer Jetson系列上进行EtherCat通信。
先决条件
- reComputer(预装Jetpack 6.2)
- 以太网电缆
- EtherCAT从设备
实时性能验证
在实现EtherCAT通信之前,验证您的reComputer系统是否满足工业自动化的实时性能要求至关重要。
安装实时测试工具
# Install rt-tests package for real-time latency measurement
sudo apt update
sudo apt install rt-tests -y
Run Cyclictest
# Run cyclictest with 6 threads and priority 80
sudo cyclictest -t 6 -p 80
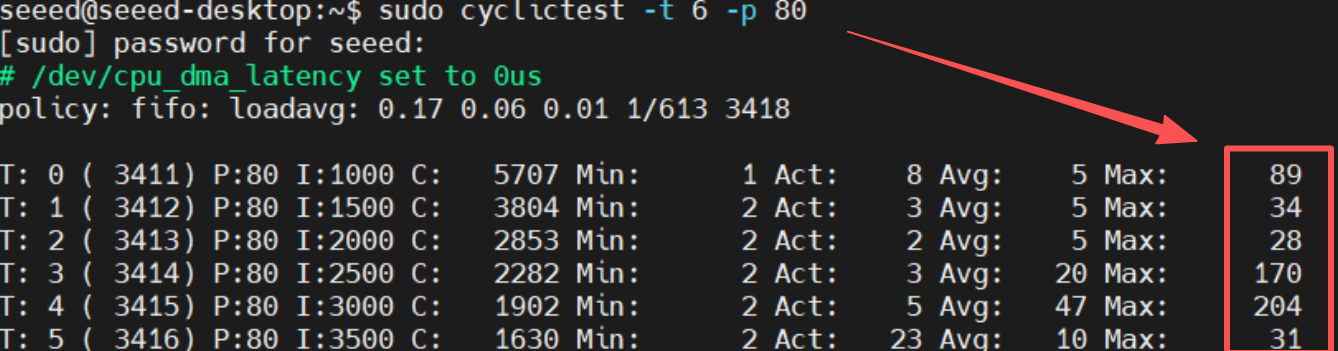
在启用 jetson_clocks 之前,您可以观察到某些线程的延迟相对较高。因此,我们需要通过以下命令启用 jetson_clocks:
sudo jetson_clocks
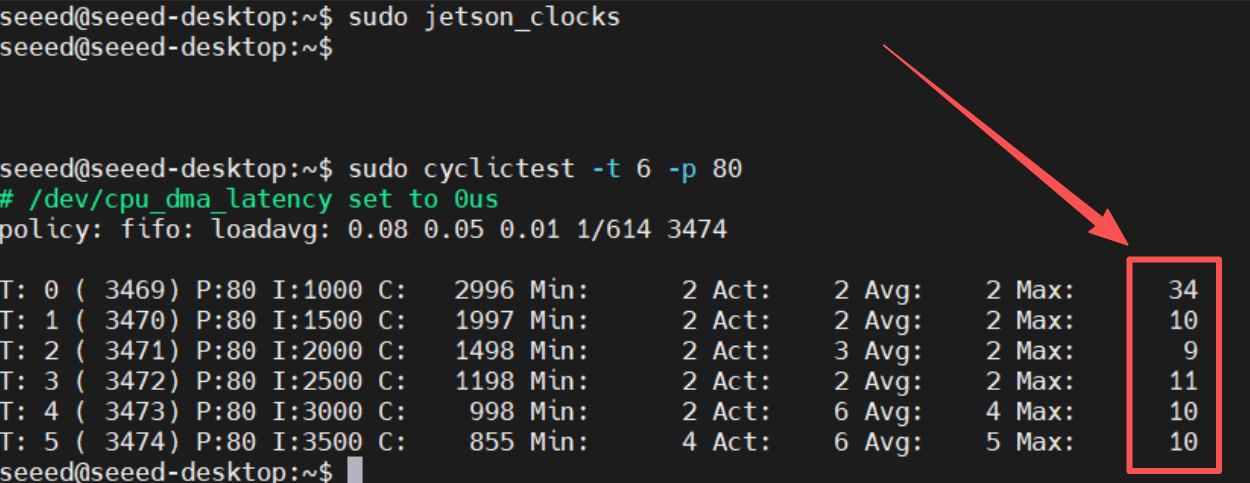
实时性能分析:
- 最大延迟:34 微秒
- 平均延迟:2-6 微秒
- 所有 6 个测试线程显示稳定的延迟在 9-34 微秒范围内
- 系统负载:0.00
- 延迟分布均匀且一致
此性能满足低于 100 微秒的硬实时应用要求,适用于机器人控制和工业自动化应用。
SOEM 库概述
SOEM(Simple Open EtherCAT Master)是一个轻量级的开源 EtherCAT 主站库,为开发者提供了一种便携且灵活的方式来建立实时 EtherCAT 通信。虽然 NVIDIA Jetson 没有原生的 EtherCAT 硬件接口,但 SOEM 能够通过标准网络接口使用原始以太网帧完全在软件中实现 EtherCAT 通信。
主要特性
- 基于软件的实现 - 无需特殊硬件
- 实时能力 - 针对低延迟通信进行优化
- 跨平台 - 适用于 Linux、Windows 和嵌入式系统
- 开源 - 免费使用和修改
- 多从站支持 - 可以控制众多 EtherCAT 设备
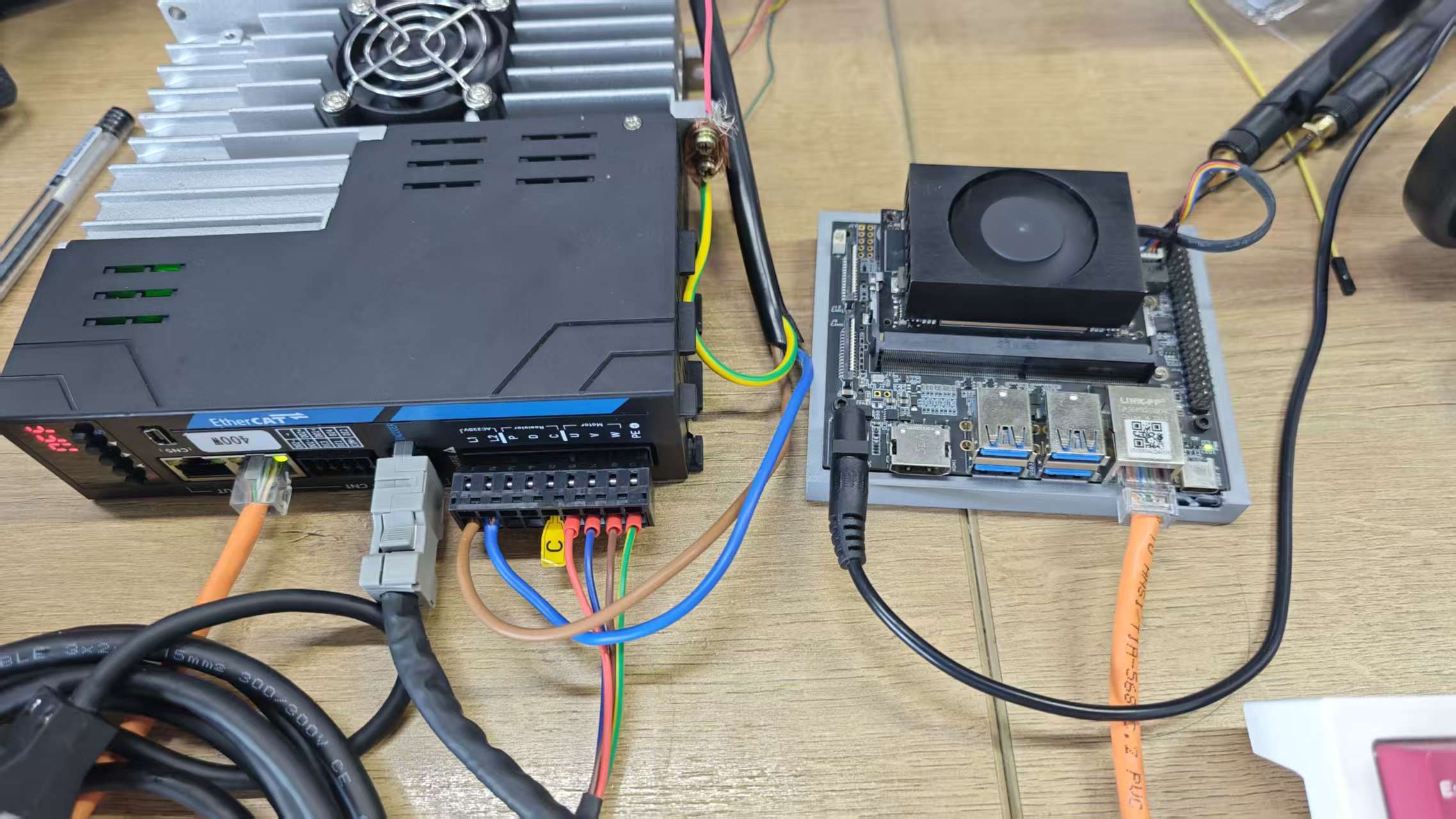
硬件连接
使用以下设置连接您的 EtherCAT 网络:
- 使用标准以太网电缆(推荐 Cat5e 或更高规格)
- 连接 reComputer(主站) 到 EtherCAT 从站设备
安装 SOEM 库
步骤 1. 克隆 SOEM 仓库
# Clone the SOEM library from GitHub
git clone https://github.com/OpenEtherCATsociety/SOEM
cd SOEM
步骤 2. 构建并安装
# Create build directory
mkdir build
cd build
# Configure with CMake
cmake ..
# Compile with 4 parallel jobs
make -j4
# Install system-wide
sudo make install
测试 EtherCAT 通信
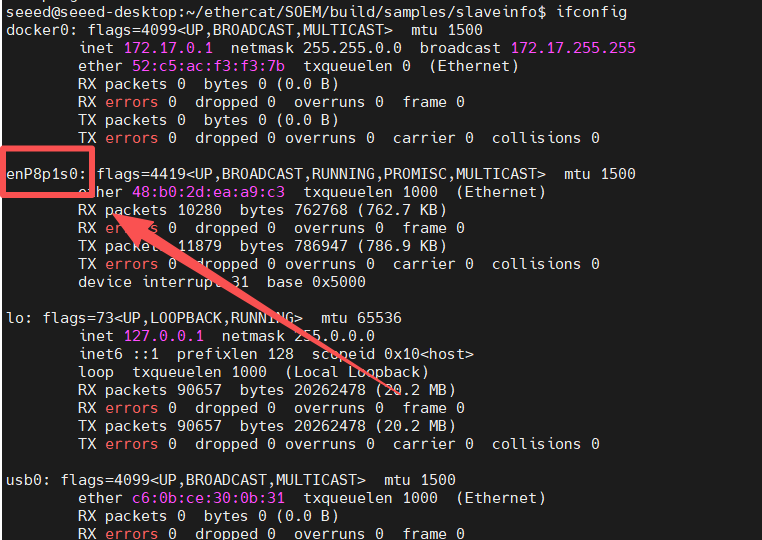
步骤 1. 确认网络接口:
# Check available network interfaces
ifconfig
步骤 2. 导航到 slaveinfo 示例并运行检测程序:
# Navigate to slaveinfo sample
cd /path/to/SOEM/build/samples/slaveinfo
# Run slave detection (replace enP8p1s0 with your interface name)
sudo ./slaveinfo enP8p1s0
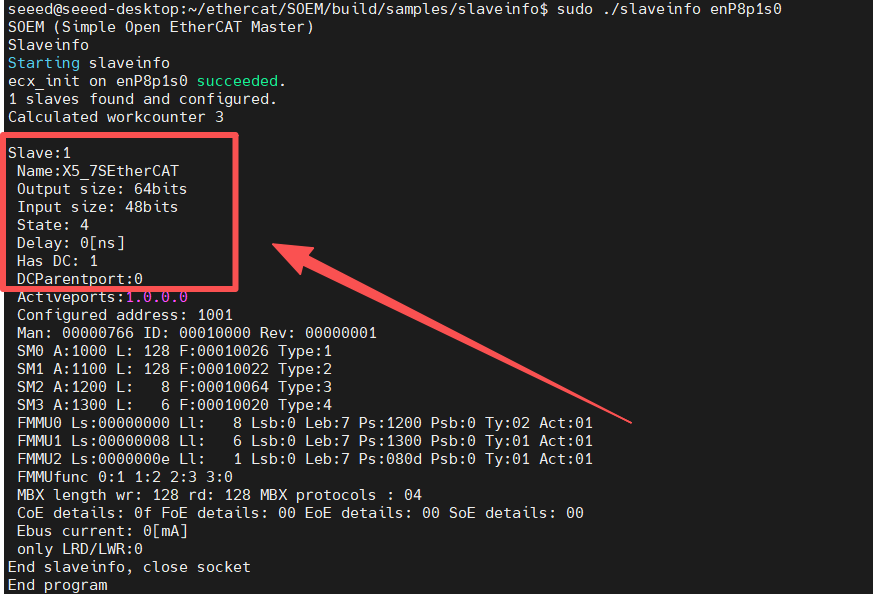
验证成功: 如果您在输出中看到"slave found",这确认了:
- SOEM 软件栈正常工作
- EtherCAT 从站设备正确连接
- 通信链路已建立
基本通信示例
C 示例
创建一个简单的 C 程序来演示基本的 EtherCAT 通信:
ethercat_communication_test.c
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
#include <stdint.h>
#include <sys/time.h>
// EtherCAT includes
# include "ethercat.h"
// Function prototypes
void print_state_info(const char* state_name, int success);
void set_control_mode(int mode);
void read_control_mode(void);
void set_servo_parameters(void);
void configure_pdo_mapping(void);
void sleep_ms(int milliseconds);
int main(int argc, char *argv[])
{
int ret;
char*ifname = "enP8p1s0"; // Network interface name
printf("EtherCAT Communication Test - C Version\n");
printf("=======================================\n\n");
// Initialize EtherCAT communication
printf("Initializing EtherCAT communication...\n");
// Initialize EtherCAT master
if (ec_init(ifname)) {
printf("✅ EtherCAT master initialized successfully\n");
} else {
printf("❌ Failed to initialize EtherCAT master\n");
return -1;
}
// Find and configure slaves
if (ec_config_init(FALSE) > 0) {
printf("✅ Found %d slaves\n", ec_slavecount);
} else {
printf("❌ No slaves found\n");
ec_close();
return -1;
}
// Print slave information
printf("Found slave: %s, state: %d\n",
ec_slave[1].name, ec_slave[1].state);
// Enter PRE-OP state (SDO communication allowed)
printf("\n📡 Entering PRE-OP state (SDO communication allowed)...\n");
ec_statecheck(0, EC_STATE_PRE_OP, EC_TIMEOUTSTATE);
ret = ec_writestate(0);
if (ret == EK_OK) {
print_state_info("PRE-OP", 1);
} else {
print_state_info("PRE-OP", 0);
}
// Enter SAFE-OP state (safe PDO communication allowed)
printf("\n📡 Entering SAFE-OP state (safe PDO communication allowed)...\n");
ec_statecheck(0, EC_STATE_SAFE_OP, EC_TIMEOUTSTATE);
ret = ec_writestate(0);
if (ret == EK_OK) {
print_state_info("SAFE-OP", 1);
} else {
print_state_info("SAFE-OP", 0);
}
// Enter OP state (full PDO communication allowed)
printf("\n📡 Entering OP state (full PDO communication allowed)...\n");
ec_statecheck(0, EC_STATE_OPERATIONAL, EC_TIMEOUTSTATE);
ret = ec_writestate(0);
if (ret == EK_OK) {
print_state_info("OP", 1);
} else {
print_state_info("OP", 0);
}
// Switch between different control modes
printf("\n=== Control Mode Testing ===\n");
set_control_mode(1); // Position control
set_control_mode(3); // Velocity control
set_control_mode(4); // Torque control
set_control_mode(6); // Homing
set_control_mode(7); // Interpolated position mode
set_control_mode(8); // Cyclic synchronous position mode
set_control_mode(0); // No mode
// Set servo parameters
printf("\n=== Setting Servo Parameters ===\n");
set_servo_parameters();
// Configure PDO mapping
printf("\n=== Configuring PDO Mapping ===\n");
configure_pdo_mapping();
// Print final slave state
printf("\nSlave state: %d\n", ec_slave[1].state);
printf("\nEtherCAT communication test completed\n");
// Cleanup
ec_close();
return 0;
}
void print_state_info(const char* state_name, int success)
{
if (success) {
printf("📡 Successfully entered %s state\n", state_name);
} else {
printf("📡 Failed to enter %s state\n", state_name);
}
}
void set_control_mode(int mode)
{
uint8_t mode_data = (uint8_t)mode;
int ret;
// Write control mode to object 0x6060
ret = ec_SDOwrite(1, 0x6060, 0, FALSE, sizeof(mode_data), &mode_data, EC_TIMEOUTRXM);
if (ret > 0) {
switch(mode) {
case 1:
printf("✅ Successfully set position control mode\n");
break;
case 3:
printf("✅ Successfully set velocity control mode\n");
break;
case 4:
printf("✅ Successfully set torque control mode\n");
break;
case 6:
printf("✅ Successfully set homing mode\n");
break;
case 7:
printf("✅ Successfully set interpolated position mode\n");
break;
case 8:
printf("✅ Successfully set cyclic synchronous position mode\n");
break;
case 0:
printf("✅ Successfully set no mode\n");
break;
default:
printf("✅ Successfully set mode %d\n", mode);
break;
}
} else {
printf("❌ Failed to set control mode %d\n", mode);
}
// Read back the current mode
read_control_mode();
sleep_ms(1000);
}
void read_control_mode(void)
{
int ret;
uint8_t mode_data;
int wkc;
ret = ec_SDOread(1, 0x6060, 0, FALSE, &wkc, &mode_data, sizeof(mode_data), EC_TIMEOUTRXM);
if (ret > 0) {
printf("Current mode: %d\n", mode_data);
} else {
printf("Failed to read current mode\n");
}
}
void set_servo_parameters(void)
{
int ret;
uint32_t param_value;
int wkc;
// Set maximum position range (0x607F)
param_value = 1000000;
ret = ec_SDOwrite(1, 0x607F, 0, FALSE, sizeof(param_value), ¶m_value, EC_TIMEOUTRXM);
if (ret > 0) {
printf("✅ Set maximum position range: %u\n", param_value);
} else {
printf("❌ Failed to set position range\n");
}
// Read back position range
ret = ec_SDOread(1, 0x607F, 0, FALSE, &wkc, ¶m_value, sizeof(param_value), EC_TIMEOUTRXM);
if (ret > 0) {
printf("Position range: %u\n", param_value);
}
// Set maximum velocity (0x6081)
param_value = 1000000;
ret = ec_SDOwrite(1, 0x6081, 0, FALSE, sizeof(param_value), ¶m_value, EC_TIMEOUTRXM);
if (ret > 0) {
printf("✅ Set maximum velocity: %u\n", param_value);
} else {
printf("❌ Failed to set velocity\n");
}
// Read back velocity
ret = ec_SDOread(1, 0x6081, 0, FALSE, &wkc, ¶m_value, sizeof(param_value), EC_TIMEOUTRXM);
if (ret > 0) {
printf("Maximum velocity: %u\n", param_value);
}
// Set maximum acceleration (0x6083)
param_value = 1000;
ret = ec_SDOwrite(1, 0x6083, 0, FALSE, sizeof(param_value), ¶m_value, EC_TIMEOUTRXM);
if (ret > 0) {
printf("✅ Set maximum acceleration: %u\n", param_value);
} else {
printf("❌ Failed to set acceleration\n");
}
// Read back acceleration
ret = ec_SDOread(1, 0x6083, 0, FALSE, &wkc, ¶m_value, sizeof(param_value), EC_TIMEOUTRXM);
if (ret > 0) {
printf("Maximum acceleration: %u\n", param_value);
}
printf("✅ Successfully set servo parameters\n");
}
void configure_pdo_mapping(void)
{
int ret;
uint8_t mapping_count;
uint32_t mapping_data;
int wkc;
// Configure receive PDO mapping (1600h) - Master to slave
printf("Configuring receive PDO mapping (1600h)...\n");
// Clear existing mapping
mapping_count = 0;
ret = ec_SDOwrite(1, 0x1600, 0, FALSE, sizeof(mapping_count), &mapping_count, EC_TIMEOUTRXM);
// Set control word mapping (6040h, 16-bit)
mapping_data = 0x60400010;
ret = ec_SDOwrite(1, 0x1600, 1, FALSE, sizeof(mapping_data), &mapping_data, EC_TIMEOUTRXM);
// Set target position mapping (607Ah, 32-bit)
mapping_data = 0x607A0020;
ret = ec_SDOwrite(1, 0x1600, 2, FALSE, sizeof(mapping_data), &mapping_data, EC_TIMEOUTRXM);
// Set mapping count
mapping_count = 2;
ret = ec_SDOwrite(1, 0x1600, 0, FALSE, sizeof(mapping_count), &mapping_count, EC_TIMEOUTRXM);
if (ret > 0) {
printf("✅ Receive PDO mapping configured\n");
} else {
printf("❌ Failed to configure receive PDO mapping\n");
}
// Configure transmit PDO mapping (1A00h) - Slave to master
printf("Configuring transmit PDO mapping (1A00h)...\n");
// Clear existing mapping
mapping_count = 0;
ret = ec_SDOwrite(1, 0x1A00, 0, FALSE, sizeof(mapping_count), &mapping_count, EC_TIMEOUTRXM);
// Set status word mapping (6041h, 16-bit)
mapping_data = 0x60410010;
ret = ec_SDOwrite(1, 0x1A00, 1, FALSE, sizeof(mapping_data), &mapping_data, EC_TIMEOUTRXM);
// Set actual position mapping (6064h, 32-bit)
mapping_data = 0x60640020;
ret = ec_SDOwrite(1, 0x1A00, 2, FALSE, sizeof(mapping_data), &mapping_data, EC_TIMEOUTRXM);
// Set mapping count
mapping_count = 2;
ret = ec_SDOwrite(1, 0x1A00, 0, FALSE, sizeof(mapping_count), &mapping_count, EC_TIMEOUTRXM);
if (ret > 0) {
printf("✅ Transmit PDO mapping configured\n");
} else {
printf("❌ Failed to configure transmit PDO mapping\n");
}
printf("✅ PDO mapping configuration completed\n");
}
void sleep_ms(int milliseconds)
{
usleep(milliseconds * 1000);
}
创建一个 Makefile 文件来编译这个程序:
将 SOEM_PATH 替换为您自己的安装路径!
Makefile
# Makefile for EtherCAT Communication Test with Local SOEM Library
# Compiler and flags
CC = gcc
CFLAGS = -Wall -Wextra -std=c99 -O2
LDFLAGS = -lrt -lpthread
# Local SOEM library paths
SOEM_PATH = /home/seeed/ethercat/SOEM
INCLUDES = -I$(SOEM_PATH)/build/install/include
LIBS = -L$(SOEM_PATH)/build -lsoem
# Target executables
TARGET_FULL = ethercat_communication_test
TARGET_SIMPLE = ethercat_simple_test
# Source files
SOURCES_FULL = ethercat_communication_test.c
SOURCES_SIMPLE = ethercat_simple_test.c
# Object files
OBJECTS_FULL = $(SOURCES_FULL:.c=.o)
OBJECTS_SIMPLE = $(SOURCES_SIMPLE:.c=.o)
# Default target
all: $(TARGET_SIMPLE)
# Build the simple version (recommended)
simple: $(TARGET_SIMPLE)
# Build the full version
full: $(TARGET_FULL)
# Build the simple executable
$(TARGET_SIMPLE): $(OBJECTS_SIMPLE)
$(CC) $(OBJECTS_SIMPLE) -o $(TARGET_SIMPLE) $(LIBS) $(LDFLAGS)
@echo "✅ Simple version build completed successfully!"
@echo "Run with: sudo ./$(TARGET_SIMPLE)"
# Build the full executable
$(TARGET_FULL): $(OBJECTS_FULL)
$(CC) $(OBJECTS_FULL) -o $(TARGET_FULL) $(LIBS) $(LDFLAGS)
@echo "✅ Full version build completed successfully!"
@echo "Run with: sudo ./$(TARGET_FULL)"
# Compile source files
%.o: %.c
$(CC) $(CFLAGS) $(INCLUDES) -c $< -o $@
# Clean build files
clean:
rm -f $(OBJECTS_FULL) $(OBJECTS_SIMPLE) $(TARGET_FULL) $(TARGET_SIMPLE)
@echo "🧹 Cleaned build files"
# Check local SOEM installation
check-soem:
@echo "Checking local SOEM installation..."
@if [ -f "$(SOEM_PATH)/build/install/include/soem/soem.h" ]; then \
echo "✅ SOEM headers found at $(SOEM_PATH)/build/install/include/soem/soem.h"; \
else \
echo "❌ SOEM headers not found"; \
fi
@if [ -f "$(SOEM_PATH)/build/libsoem.a" ]; then \
echo "✅ SOEM library found at $(SOEM_PATH)/build/libsoem.a"; \
else \
echo "❌ SOEM library not found"; \
fi
# Test compilation
test-compile: check-soem
@echo "Testing compilation..."
@make clean
@make simple
@echo "✅ Compilation test successful!"
# Manual compilation commands for reference
manual-compile:
@echo "Manual compilation commands:"
@echo "Simple version:"
@echo " gcc -Wall -Wextra -std=c99 -O2 \\"
@echo " -I$(SOEM_PATH)/build/install/include \\"
@echo " ethercat_simple_test.c \\"
@echo " -o ethercat_simple_test \\"
@echo " -L$(SOEM_PATH)/build -lsoem -lrt -lpthread"
@echo ""
@echo "Full version:"
@echo " gcc -Wall -Wextra -std=c99 -O2 \\"
@echo " -I$(SOEM_PATH)/build/install/include \\"
@echo " ethercat_communication_test.c \\"
@echo " -o ethercat_communication_test \\"
@echo " -L$(SOEM_PATH)/build -lsoem -lrt -lpthread"
# Help target
help:
@echo "Available targets:"
@echo " all - Build the simple version (default)"
@echo " simple - Build the simple version"
@echo " full - Build the full version"
@echo " clean - Remove build files"
@echo " check-soem - Check local SOEM installation"
@echo " test-compile - Test compilation"
@echo " manual-compile - Show manual compilation commands"
@echo " help - Show this help message"
@echo ""
@echo "Quick start:"
@echo " make # Build the program"
@echo " sudo ./ethercat_simple_test # Run the program"
@echo ""
@echo "SOEM library location: $(SOEM_PATH)"
编译并运行程序:
make gcc -Wall -Wextra -std=c99 -O2 -I/home/seeed/ethercat/SOEM/build/install/include -c ethercat_simple_test.c -o ethercat_simple_test.o
sudo ./ethercat_simple_test
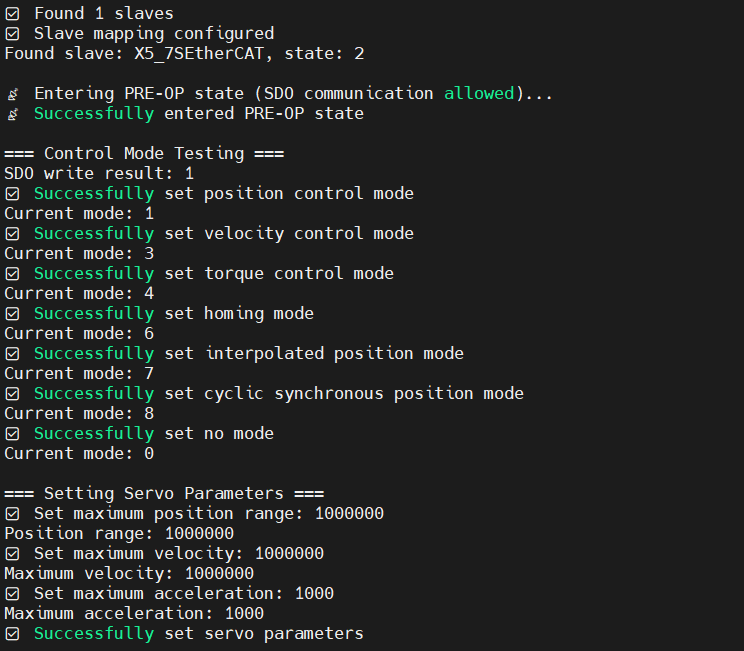
如上所示,成功的 EtherCat 通信将修改从站的驱动模式,并且能够正常读取从站的状态信息。
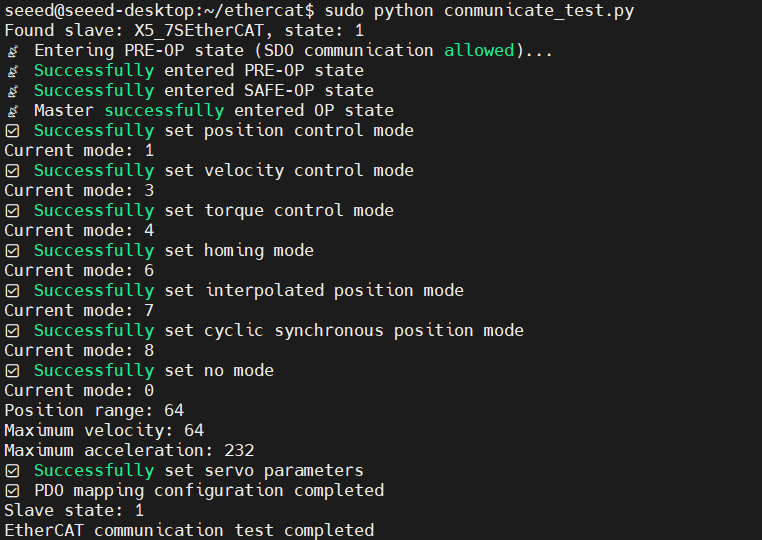
Python 示例
对于基于 Python 的应用程序,您可以使用 pysoem 库:
conmunicate_test.py
import pysoem
import time
import struct
# Initialize EtherCAT communication
# Network interface name
interface_name = "enP8p1s0"
# Create EtherCAT master object
master = pysoem.Master()
# Open EtherCAT master connection
master.open(interface_name)
# Initialize slaves
master.config_init()
slaver = master.slaves[0]
print(f"Found slave: {slaver.name}, state: {slaver.state}")
print("📡 Entering PRE-OP state (SDO communication allowed)...")
# Set master state to PREOP_STATE
master.state = pysoem.PREOP_STATE
# Write state to EtherCAT network
master.write_state()
# Check if entered successfully
if master.state == pysoem.PREOP_STATE:
print("📡 Successfully entered PRE-OP state")
else:
print("📡 Failed to enter PRE-OP state")
# Enter SAFE-OP state (safe PDO communication allowed)
master.state = pysoem.SAFEOP_STATE
master.write_state()
# Check if entered successfully
if master.state == pysoem.SAFEOP_STATE:
print("📡 Successfully entered SAFE-OP state")
else:
print("📡 Failed to enter SAFE-OP state")
# Enter OP state (full PDO communication allowed)
master.state = pysoem.OP_STATE
master.write_state()
# Check if entered successfully
if master.state == pysoem.OP_STATE:
print("📡 Master successfully entered OP state")
else:
print("📡 Failed to enter OP state")
# Switch between different control modes
slaver.sdo_write(0x6060, 0, struct.pack('<B', 1)) # Set mode to position control
print("✅ Successfully set position control mode")
print(f"Current mode: {struct.unpack('<b', slaver.sdo_read(0x6060, 0))[0]}")
time.sleep(1)
slaver.sdo_write(0x6060, 0, struct.pack('<B', 3)) # Set mode to velocity control
print("✅ Successfully set velocity control mode")
print(f"Current mode: {struct.unpack('<b', slaver.sdo_read(0x6060, 0))[0]}")
time.sleep(1)
slaver.sdo_write(0x6060, 0, struct.pack('<B', 4)) # Set mode to torque control
print("✅ Successfully set torque control mode")
print(f"Current mode: {struct.unpack('<b', slaver.sdo_read(0x6060, 0))[0]}")
time.sleep(1)
slaver.sdo_write(0x6060, 0, struct.pack('<B', 6)) # Set mode to homing
print("✅ Successfully set homing mode")
print(f"Current mode: {struct.unpack('<b', slaver.sdo_read(0x6060, 0))[0]}")
time.sleep(1)
slaver.sdo_write(0x6060, 0, struct.pack('<B', 7)) # Set mode to interpolated position mode
print("✅ Successfully set interpolated position mode")
print(f"Current mode: {struct.unpack('<b', slaver.sdo_read(0x6060, 0))[0]}")
time.sleep(1)
slaver.sdo_write(0x6060, 0, struct.pack('<B', 8)) # Set mode to cyclic synchronous position mode
print("✅ Successfully set cyclic synchronous position mode")
print(f"Current mode: {struct.unpack('<b', slaver.sdo_read(0x6060, 0))[0]}")
time.sleep(1)
slaver.sdo_write(0x6060, 0, struct.pack('<B', 0)) # Set mode to no mode
print("✅ Successfully set no mode")
print(f"Current mode: {struct.unpack('<b', slaver.sdo_read(0x6060, 0))[0]}")
time.sleep(1)
# Set necessary parameters for control configuration
slaver.sdo_write(0x607F, 0, struct.pack('<I', 1000000)) # Maximum position range
print(f"Position range: {slaver.sdo_read[0x607F, 0](0)}")
slaver.sdo_write(0x6081, 0, struct.pack('<I', 1000000)) # Maximum velocity
print(f"Maximum velocity: {slaver.sdo_read[0x6081, 0](0)}")
slaver.sdo_write(0x6083, 0, struct.pack('<I', 1000)) # Maximum acceleration
print(f"Maximum acceleration: {slaver.sdo_read[0x6083, 0](0)}")
print("✅ Successfully set servo parameters")
# Configure receive PDO mapping (1600h) - Master to slave
slaver.sdo_write(0x1600, 0, struct.pack('<B', 0)) # Clear existing mapping
slaver.sdo_write(0x1600, 1, struct.pack('<I', 0x60400010)) # Control word (6040h, 16-bit)
slaver.sdo_write(0x1600, 2, struct.pack('<I', 0x607A0020)) # Target position (607Ah, 32-bit)
slaver.sdo_write(0x1600, 0, struct.pack('<B', 2)) # Set mapping count
# Configure transmit PDO mapping (1A00h) - Slave to master
slaver.sdo_write(0x1A00, 0, struct.pack('<B', 0)) # Clear existing mapping
slaver.sdo_write(0x1A00, 1, struct.pack('<I', 0x60410010)) # Status word (6041h, 16-bit)
slaver.sdo_write(0x1A00, 2, struct.pack('<I', 0x60640020)) # Actual position (6064h, 32-bit)
slaver.sdo_write(0x1A00, 0, struct.pack('<B', 2)) # Set mapping count
print("✅ PDO mapping configuration completed")
print(f"Slave state: {slaver.state}")
print("EtherCAT communication test completed")
在运行 Python 脚本之前,您需要安装 pysoem 库:
pip3 install pysoem
# Run Python example with sudo
sudo python3 ethercat_python.py
技术支持与产品讨论
感谢您选择我们的产品!我们在这里为您提供不同的支持,以确保您使用我们产品的体验尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。