J401B接口使用
介绍

本wiki介绍了reComputer J401B上的各种不同硬件和接口,以及如何使用它们来扩展您的项目想法。
Mini-PCIe
reComputer J401B配备了一个支持4G的mini PCIe连接器。
支持的4G模块
- LTE Cat 4 EC25-AFXGA
- LTE Cat 4 EC25-EUX
- LTE Cat 4 EC25-AUXGR
- LTE Cat 4 EC25-EFA
- LTE Cat 4 EC25-EMGA
- LTE Cat 4 EC25-JFA
连接概述
- 步骤1. 安装4G模块
- 步骤2. 连接天线
- 步骤3. 插入SIM卡
使用方法
-
步骤1. 打开移动宽带并根据4G SIM卡的规格配置网络连接。
设置-->网络-->移动宽带 -
步骤2. 打开浏览器测试4G网络是否正常工作。
260针SODIMM
260针SODIMM的主要功能是将您的载板与**NVIDIA Jetson Orin Nano 4GB/NVIDIA Jetson Orin Nano 8GB、NVIDIA Jetson Orin NX 8GB/NVIDIA Jetson Orin NX 16GB**连接。
连接概述
如果连接正确,当您连接电源适配器时,您将看到电源指示灯亮起。
M.2 Key M
M.2 Key M 是一种 M.2 连接器物理和电气布局的规范,支持使用 PCIe(外围组件互连快速)接口进行高速数据传输。M.2 Key M 连接器通常用于将固态硬盘(SSD)和其他高性能扩展卡连接到主板或其他主机设备。"Key M"标识指的是 M.2 连接器的特定引脚配置和键控,这决定了可以连接到它的设备类型。
支持的 SSD 如下
- 128GB NVMe M.2 PCle Gen3x4 2280 内置 SSD
- 256GB NVMe M.2 PCle Gen3x4 2280 内置 SSD
- 512GB NVMe M.2 PCle Gen3x4 2280 内置 SSD
- 1TB NVMe M.2 PCle Gen3x4 2280 内置 SSD
- 2TB NVMe M.2 PCle Gen3x4 2280 内置 SSD
连接概述
如果您想要移除附带的 SSD 并安装新的 SSD,可以按照以下步骤操作。
使用方法
我们将解释如何对连接的 SSD 进行简单的基准测试。
- 步骤 1: 通过执行以下命令检查写入速度。
sudo dd if=/dev/zero of=/home/nvidia/test bs=1M count=512 conv=fdatasync
- 步骤 2: 通过执行以下命令检查读取速度。确保在执行上述写入速度命令后再执行此命令。
sudo sh -c "sync && echo 3 > /proc/sys/vm/drop_caches"
sudo dd if=/home/nvidia/test of=/dev/null bs=1M count=512
M.2 Key E
M.2 Key E 是一种 M.2 连接器的物理和电气布局规范,支持无线通信模块,如 Wi-Fi 和蓝牙卡。"Key E" 指的是 M.2 连接器的特定引脚配置和键控,专为无线网络设备优化。M.2 Key E 连接器通常出现在主板和其他需要无线连接选项的设备上。这里我们推荐 Intel wifi/bluetooth 模块。
连接概述
使用方法
安装 wifi/bluetooth 模块后,您可以在右上角看到 wifi/bluetooth 图标。
Wi-Fi 测试
ifconfig

蓝牙测试
bluetoothctl
power on #open bluetooth
agent on #registe agent
scan on #search other bluetooths
connect xx:xx:xx:xx #connect target bluetooth
paired-devices #show all paired devices

CSI 摄像头
CSI 代表摄像头串行接口。它是一种规范,描述了用于将视频数据从图像传感器传输到主处理器的串行通信接口。CSI 通常用于移动设备、摄像头和嵌入式系统中,以实现图像和视频数据的高速高效传输,用于处理和分析。
支持的摄像头如下
-
IMX219 摄像头
-
IMX477 摄像头
连接概述
这里的 2 个 CSI 摄像头连接器标记为 CAM0 和 CAM1。您可以将一个摄像头连接到 2 个连接器中的任意一个,或者同时将 2 个摄像头连接到两个连接器上。
使用方法
打开您的终端(Ctrl+Alt+T)并输入如下命令:
sudo /opt/nvidia/jetson-io/jetson-io.py
- 方法 1
- Method 2
对于 CAM0 端口
nvgstcapture-1.0 sensor-id=0
For CAM1 port
nvgstcapture-1.0 sensor-id=1
如果您想进一步更改相机的设置,可以输入 "nvgstcapture-1.0 --help" 来访问所有可用的可配置选项。
对于 CAM0 端口
gst-launch-1.0 nvarguscamerasrc sensor-id=0 sensor-mode=0 ! 'video/x-raw(memory:NVMM),width=1920, height=1080, framerate=20/1, format=NV12' ! nvvidconv ! xvimagesink
For CAM1 port
gst-launch-1.0 nvarguscamerasrc sensor-id=1 sensor-mode=0 ! 'video/x-raw(memory:NVMM),width=1920, height=1080, framerate=20/1, format=NV12' ! nvvidconv ! xvimagesink
如果您想进一步更改相机设置,可以更新参数,如 width、height、framerate、format 等。
RTC
RTC 代表实时时钟。它是一个独立于主系统时钟跟踪当前时间和日期的时钟。RTC 通常用于计算机、嵌入式系统和其他电子设备中,即使在设备断电时也能保持准确的计时。它们通常由小电池供电,以确保连续运行并在电源循环期间保留时间和日期信息。
连接概述
- 方法 1
- 方法 2
将 3V CR1220 纽扣电池 连接到板上的 RTC 插座,如下所示。确保电池的 正极 (+) 端朝上。
将 带 JST 连接器的 3V CR2302 纽扣电池 连接到板上的 2 针 1.25mm JST 插座,如下所示:
使用方法
-
步骤 1: 按照上述方法连接 RTC 电池。
-
步骤 2: 打开 reComputer Industrial。
-
步骤 3: 在 Ubuntu 桌面上,点击右上角的下拉菜单,导航到
Settings > Date & Time,通过以太网电缆连接到网络并选择 Automatic Date & Time 以自动获取日期/时间。

如果您没有通过以太网连接到互联网,可以在此处手动设置日期/时间。
- 步骤 4: 打开终端窗口,执行以下命令检查硬件时钟时间。
sudo hwclock
您将看到如下所示的输出,这不是正确的日期/时间。

- 步骤 5: 通过输入以下命令将硬件时钟时间更改为当前系统时钟时间。
sudo hwclock --systohc
- 步骤 6: 移除任何连接的以太网电缆,确保它不会从互联网获取时间,然后重启开发板。
sudo reboot
-
步骤 7: 检查硬件时钟时间,以验证即使设备断电,日期/时间也保持不变。
-
步骤 8: 使用您偏好的任何文本编辑器创建一个新的 shell 脚本。这里我们使用 vi 文本编辑器。
sudo vi /usr/bin/hwtosys.sh
- 步骤 9: 按下 i 进入插入模式,复制并粘贴以下内容到文件中。
#!/bin/bash
sudo hwclock --hctosys
- 步骤 10: 使脚本可执行。
sudo chmod +x /usr/bin/hwtosys.sh
- 步骤 11: 创建一个 systemd 文件。
sudo nano /lib/systemd/system/hwtosys.service
- 步骤 12: 在文件内添加以下内容。
[Unit]
Description=Change system clock from hardware clock
[Service]
ExecStart=/usr/bin/hwtosys.sh
[Install]
WantedBy=multi-user.target
- 步骤 13: 重新加载 systemctl 守护进程。
sudo systemctl daemon-reload
- 步骤 14: 启用新创建的服务在系统启动时自动启动,并立即启动该服务。
sudo systemctl enable hwtosys.service
sudo systemctl start hwtosys.service
- 步骤 15: 验证脚本作为 systemd 服务正在运行。
sudo systemctl status hwtosys.service
- 步骤 16: 重启开发板,您将看到系统时钟现在与硬件时钟同步。
风扇控制
nvfancontrol 是一个用户空间风扇转速控制守护进程。它基于 nvfancontrol 配置文件中的温度到风扇转速映射表来管理风扇转速。
nvfancontrol 服务中有一些基本元素,包括 Tmargin、启动 PWM、风扇配置文件、风扇控制和风扇调节器。所有这些都可以根据用户的偏好通过配置文件进行编程。本章将在以下部分中解释每一个元素。
如果您想要更改 nvfancontrol.conf,请确保您已经阅读了它
使用方法
- Method 1
- Method 2
- 步骤 1: 停止 nvfancontrol systemd 服务。
sudo systemctl stop nvfancontrol
- 步骤 2: 修改 nvfancontrol.conf。
vi /etc/nvfancontrol.conf
更改 nvfancontrol.conf 后,输入 Ese 和 :q 退出
- 步骤 3: 删除状态文件。
sudo rm /var/lib/nvfancontrol/status
- 步骤 4: 重启 nvfancontrol systemd 服务。
sudo systemctl restart nvfancontrol
- 步骤 1: 进入 root 模式。
sudo -i
- 步骤 2: 停止 nvfancontrol systemd 服务。
sudo systemctl stop nvfancontrol
- 步骤 3: 修改 PWM 值。
echo 100 > /sys/devices/platform/pwm-fan/hwmon/hwmon3/pwm1
数值越大,风扇转速越快。PWM 值应在 0 到 255 之间,可能 hwmon3 不是您的路径,请检查您自己的路径
- 步骤 4: 检查转速。
cat /sys/class/hwmon/hwmon0/rpm
GPIO
40针接头的详细信息如下所示:
| 接头引脚 | 模块引脚名称 | 模块引脚 | SoC 引脚名称 | 默认用途 | 备用功能 |
|---|---|---|---|---|---|
| 1 | - | - | - | 主 3.3V 电源 | - |
| 2 | - | - | - | 主 5.0V 电源 | - |
| 3 | I2C1_SDA | 191 | DP_AUX_CH3_N | I2C #1 数据 | - |
| 4 | - | - | - | 主 5.0V 电源 | - |
| 5 | I2C1_SCL | 189 | DP_AUX_CH3_P | I2C #1 时钟 | - |
| 6 | - | - | - | 接地 | - |
| 7 | GPIO09 | 211 | AUD_MCLK | GPIO | 音频主时钟 |
| 8 | UART1_TXD | 203 | UART1_TX | UART #1 发送 | GPIO |
| 9 | - | - | - | 接地 | - |
| 10 | UART1_RXD | 205 | UART1_RX | UART #1 接收 | GPIO |
| 11 | UART1_RTS* | 207 | UART1_RTS | GPIO | UART #2 请求发送 |
| 12 | I2S0_SCLK | 199 | DAP5_SCLK | GPIO | 音频 I2S #0 时钟 |
| 13 | SPI1_SCK | 106 | SPI3_SCK | GPIO | SPI #1 移位时钟 |
| 14 | - | - | - | 接地 | - |
| 15 | GPIO12 | 218 | TOUCH_CLK | GPIO | - |
| 16 | SPI1_CSI1* | 112 | SPI3_CS1 | GPIO | SPI #1 片选 #1 |
| 17 | - | - | - | GPIO | - |
| 18 | SPI1_CSI0* | 110 | SPI3_CS0 | GPIO | SPI #0 片选 #0 |
| 19 | SPI0_MOSI | 89 | SPI1_MOSI | GPIO | SPI #0 主出/从入 |
| 20 | - | - | - | 接地 | - |
| 21 | SPI0_MISO | 93 | SPI1_MISO | GPIO | SPI #0 主入/从出 |
| 22 | SPI1_MISO | 108 | SPI3_MISO | GPIO | SPI #1 主入/从出 |
| 23 | SPI0_SCK | 91 | SPI1_SCK | GPIO | SPI #0 移位时钟 |
| 24 | SPI0_CS0* | 95 | SPI1_CS0 | GPIO | SPI #0 片选 #0 |
| 25 | - | - | - | 接地 | - |
| 26 | SPI0_CS1* | 97 | SPI1_CS1 | GPIO | SPI #0 片选 #1 |
| 27 | I2C0_SDA | 187 | GEN2_I2C_SDA | I2C #0 数据 | GPIO |
| 28 | I2C0_SCL | 185 | GEN2_I2C_SCL | I2C #0 时钟 | GPIO |
| 29 | GPIO01 | 118 | SOC_GPIO41 | GPIO | 通用时钟 #0 |
| 30 | - | - | - | 接地 | - |
| 31 | GPIO11 | 216 | SOC_GPIO42 | GPIO | 通用时钟 #1 |
| 32 | GPIO07 | 206 | SOC_GPIO44 | GPIO | PWM |
| 33 | GPIO13 | 228 | SOC_GPIO54 | GPIO | PWM |
| 34 | - | - | - | 接地 | - |
| 35 | I2S0_FS | 197 | DAP5_FS | GPIO | 音频 I2S #0 字段选择 |
| 36 | UART1_CTS* | 209 | UART1_CTS | GPIO | UART #1 清除发送 |
| 37 | SPI1_MOSI | 104 | SPI3_MOSI | GPIO | SPI #1 主出/从入 |
| 38 | I2S0_DIN | 195 | DAP5_DIN | GPIO | 音频 I2S #0 数据输入 |
| 39 | - | - | - | 接地 | - |
| 40 | I2S0_DOUT | 193 | DAP5_DOUT | GPIO | 音频 I2S #0 数据输出 |
UART
UART 代表通用异步收发器。它是一种用于两个设备之间串行通信的通信协议。UART 通信涉及两个引脚:一个用于发送数据(TX),一个用于接收数据(RX)。它是异步的,意味着数据传输时设备之间不需要共享时钟信号。UART 常用于各种应用,如微控制器、传感器以及不同电子设备之间的通信。
连接概述
UART 接口使用下面的引脚,或者您可以在 J401 上使用另一个 UART 接口:
| 排针引脚 | 模块引脚名称 | 模块引脚 | SoC 引脚名称 | 默认用途 | 备用功能 |
|---|---|---|---|---|---|
| 6 | - | - | - | 接地 | - |
| 8 | UART1_TXD | 203 | UART1_TX | UART #1 发送 | GPIO |
| 10 | UART1_RXD | 205 | UART1_RX | UART #1 接收 | GPIO |
按照以下方式将 J401 与 TTL 通过 UART 连接:
| J401 接头引脚 | 用途 | USB 转 TTL | 用途 |
|---|---|---|---|
| 6 | 地线 | GND | 地线 |
| 8 | UART1_TXD | U_RX | UART_RX |
| 10 | UART1_RXD | U_TX | UART_TX |
使用方法
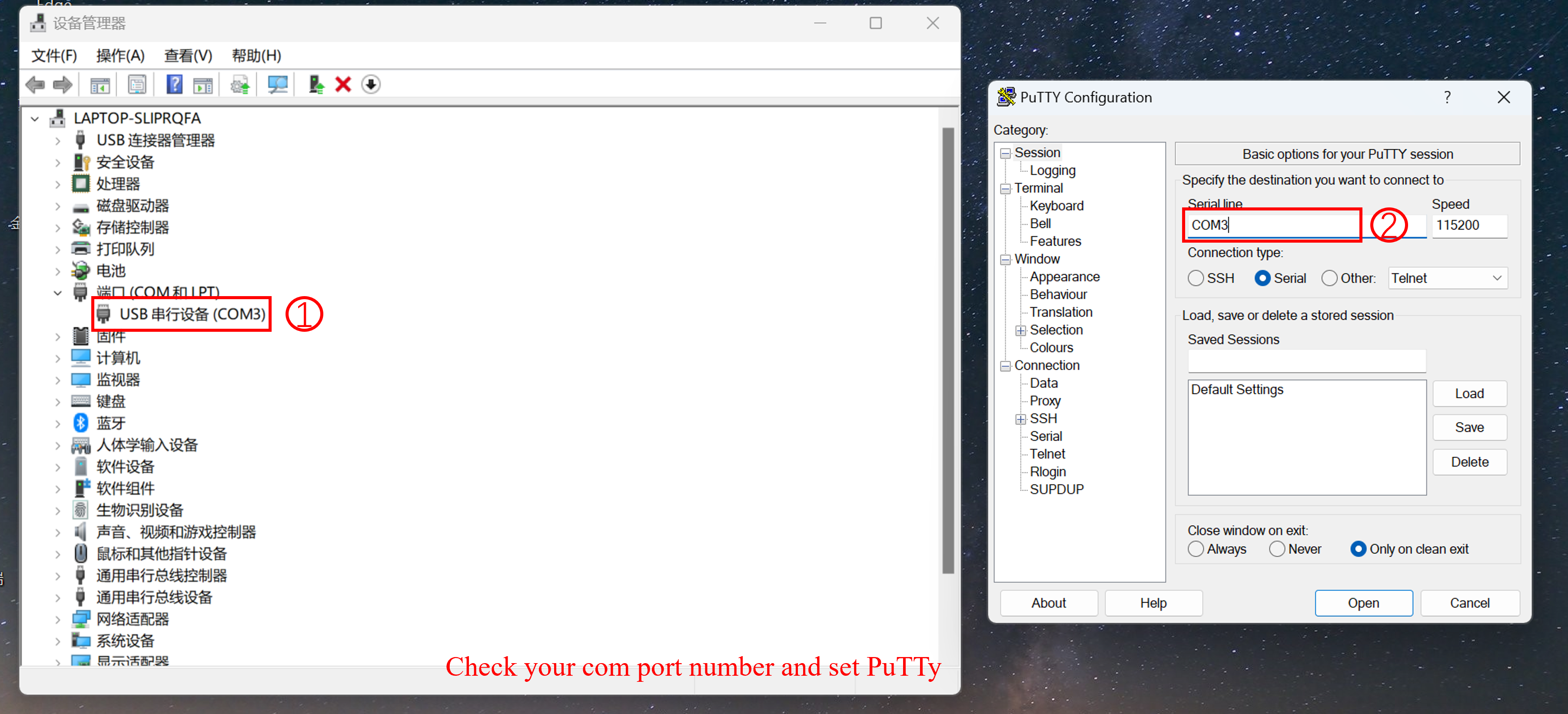
- 步骤 1: 在您的 Windows 笔记本电脑上安装 PuTTy,并按如下设置 PuTTy:
- 步骤 2: 在 Jetson 上安装 PuTTy,打开您的终端(ALT+Ctrl+T)并输入以下命令。
sudo apt install putty
- 步骤 3: 在 Windows 上使用 PuTTy 向 Jetson 发送 'hello linux',在 Jetson 上使用 PuTTy 向 Windows 发送 'hello windows'。
确保您的波特率已设置为 115200。
结果如下所示:
I2C
I2C 代表集成电路间通信。它是一种广泛使用的串行通信协议,能够在系统中的多个集成电路之间进行通信。I2C 使用两条双向线路:一条用于数据(SDA),一条用于时钟(SCL)。连接在 I2C 总线上的设备可以充当主设备或从设备,允许多个设备相互通信。I2C 因其简单性、灵活性以及能够在嵌入式系统和电子设备中连接各种设备(如传感器、存储芯片和其他外设)而广受欢迎。
连接概述
I2C 接口使用如下引脚,或者您可以在 J401 上使用其他 I2C 接口:
| 排针引脚 | 模块引脚名称 | 模块引脚 | SoC 引脚名称 | 默认用途 | 备用功能 |
|---|---|---|---|---|---|
| 2 | - | - | - | 主 5.0V 供电 | - |
| 3 | I2C1_SDA | 191 | DP_AUX_CH3_N | I2C #1 数据 | - |
| 5 | I2C1_SCL | 189 | DP_AUX_CH3_P | I2C #1 时钟 | - |
| 6 | - | - | - | 接地 | - |
将 J401 连接到 Grove-3-Axis Digital Accelerometer,使用 I2C 连接如下:
| J401 | 用途 | Grove-3-Axis Digital Accelerometer | 用途 |
|---|---|---|---|
| 2 | 5V 供电 | Vcc | - |
| 3 | I2C1_SDA | SDA | I2C_SDA |
| 5 | I2C1_SCL | SCL | I2C_SCL |
| 6 | 接地 | GND | 接地 |
测试
打开您的终端(ALT+Ctrl+T)并输入以下命令:
i2cdetect -y -r 7
在命令 i2cdetect -y -r x 中,您的通道可能与我的不同。
您将看到如下结果,在连接到 I2C 之前,通道 7 上没有检测到 I2C 设备,但之后检测到了地址为 0x19 的 I2C 设备:

如果您想使用通用 IO 引脚进行逻辑控制,请参考此 wiki。
技术支持与产品讨论
感谢您选择我们的产品!我们在这里为您提供不同的支持,以确保您使用我们产品的体验尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。