Robotics J501 载板硬件与快速上手
Robotics J501 Mini 载板是一款紧凑型、高性能的边缘 AI 载板,专为高级机器人应用设计。它兼容 NVIDIA Jetson AGX Orin 模块(32GB/64GB),在 MAXN 模式下可提供高达 275 TOPS 的 AI 性能。板载丰富的连接选项——包括双千兆以太网接口、用于 5G 和 Wi-Fi/BT 模块的 M.2 插槽、2 个 USB 3.2 接口、CAN、GMSL2(通过可选扩展)、I2C 和 UART——使其成为能够处理多种传感器复杂数据的强大机器人“大脑”。预装 JetPack 6.2.1 和 Linux BSP,确保系统可无缝部署。
支持 NVIDIA Isaac ROS、Hugging Face、PyTorch 和 ROS 2/1 等框架,Robotics J501 Mini 将大语言模型驱动的决策能力与实际机器人控制(如运动规划和传感器融合)连接起来。非常适合用于自主机器人快速开发,通过即用型接口和优化的 AI 框架,加速产品上市进程。

reComputer Jetson Robotics J501-Mini 载板概览
| 顶视图 |
|---|
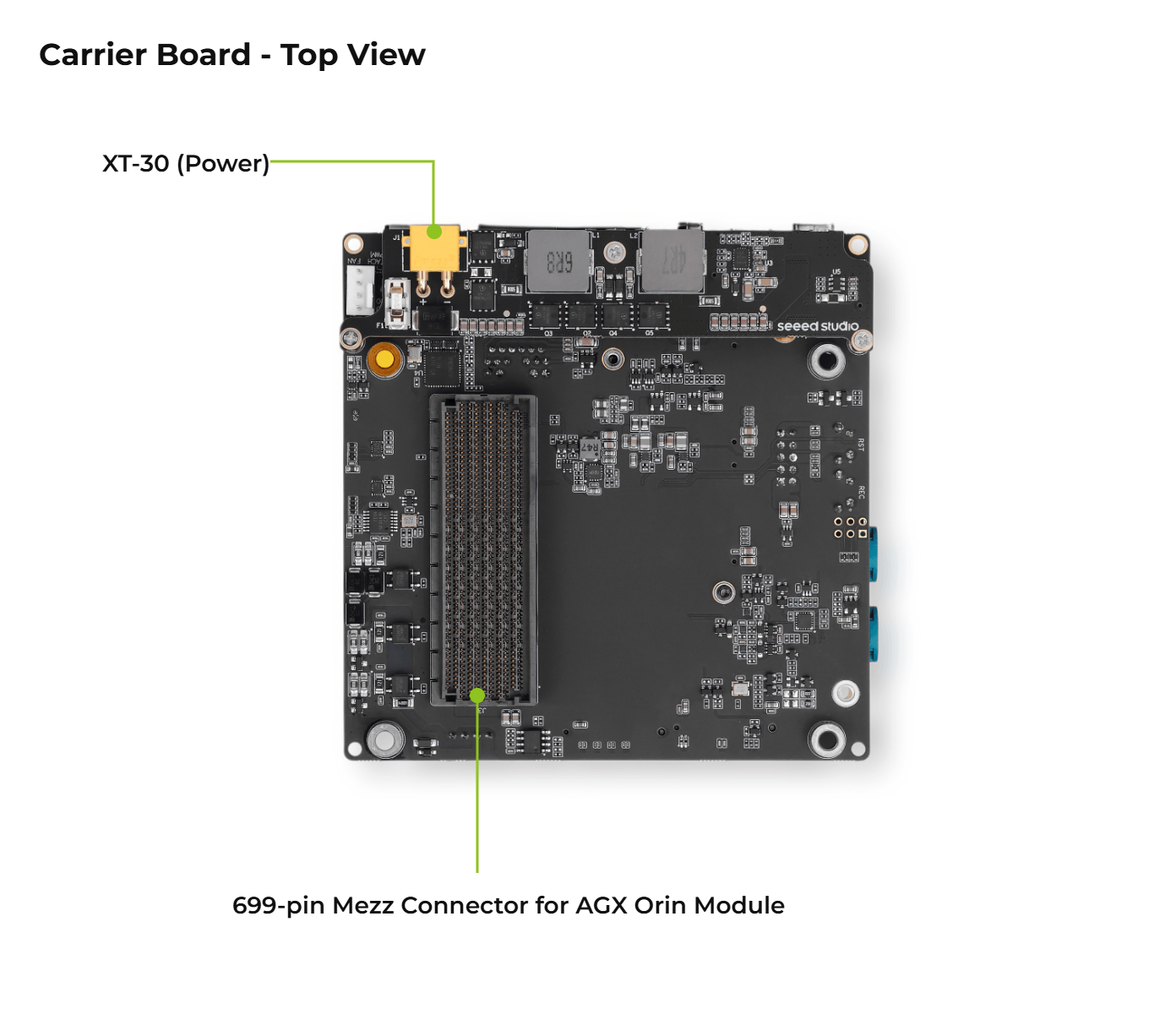 |
| 侧视图 |
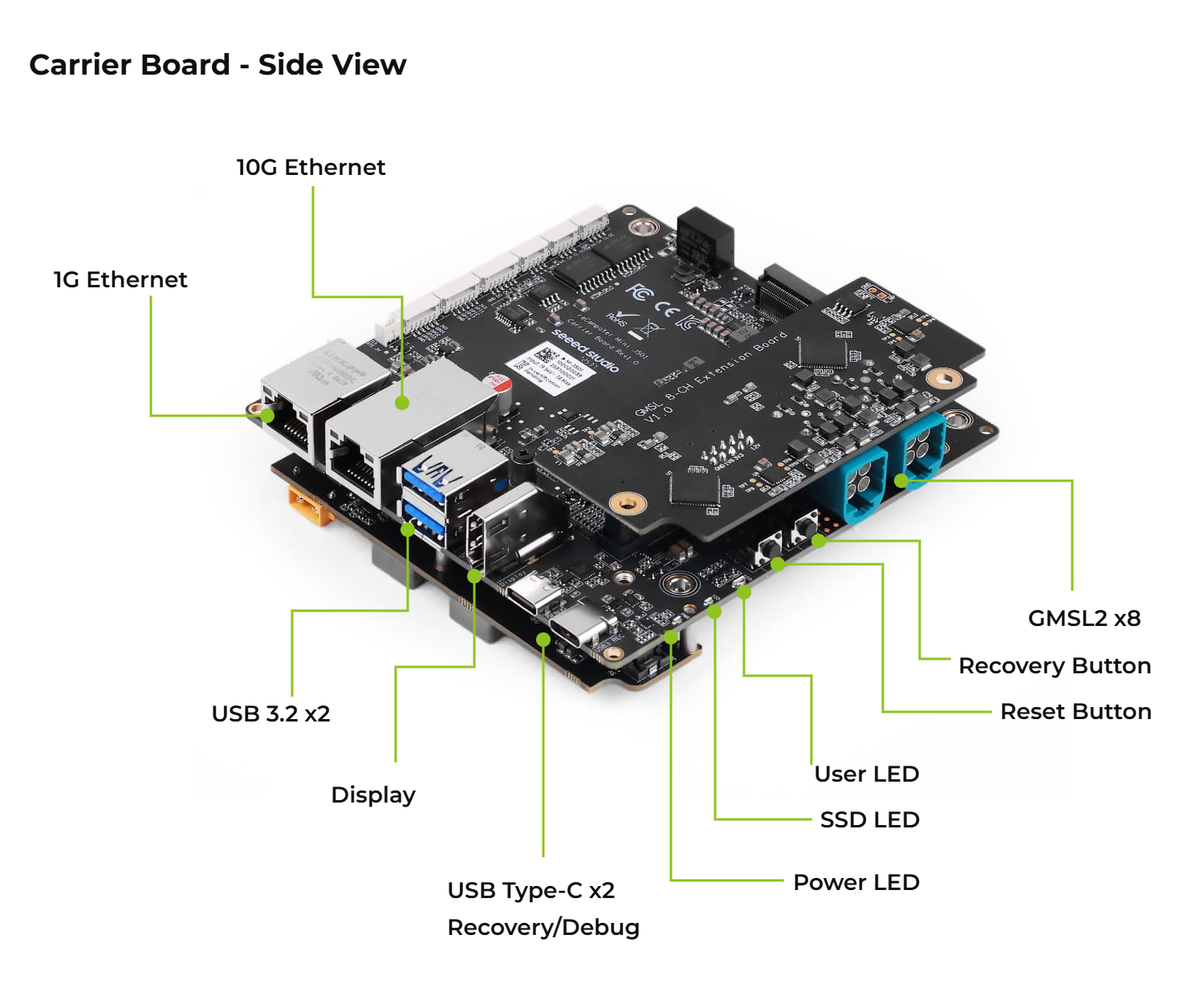 |
| 底视图 |
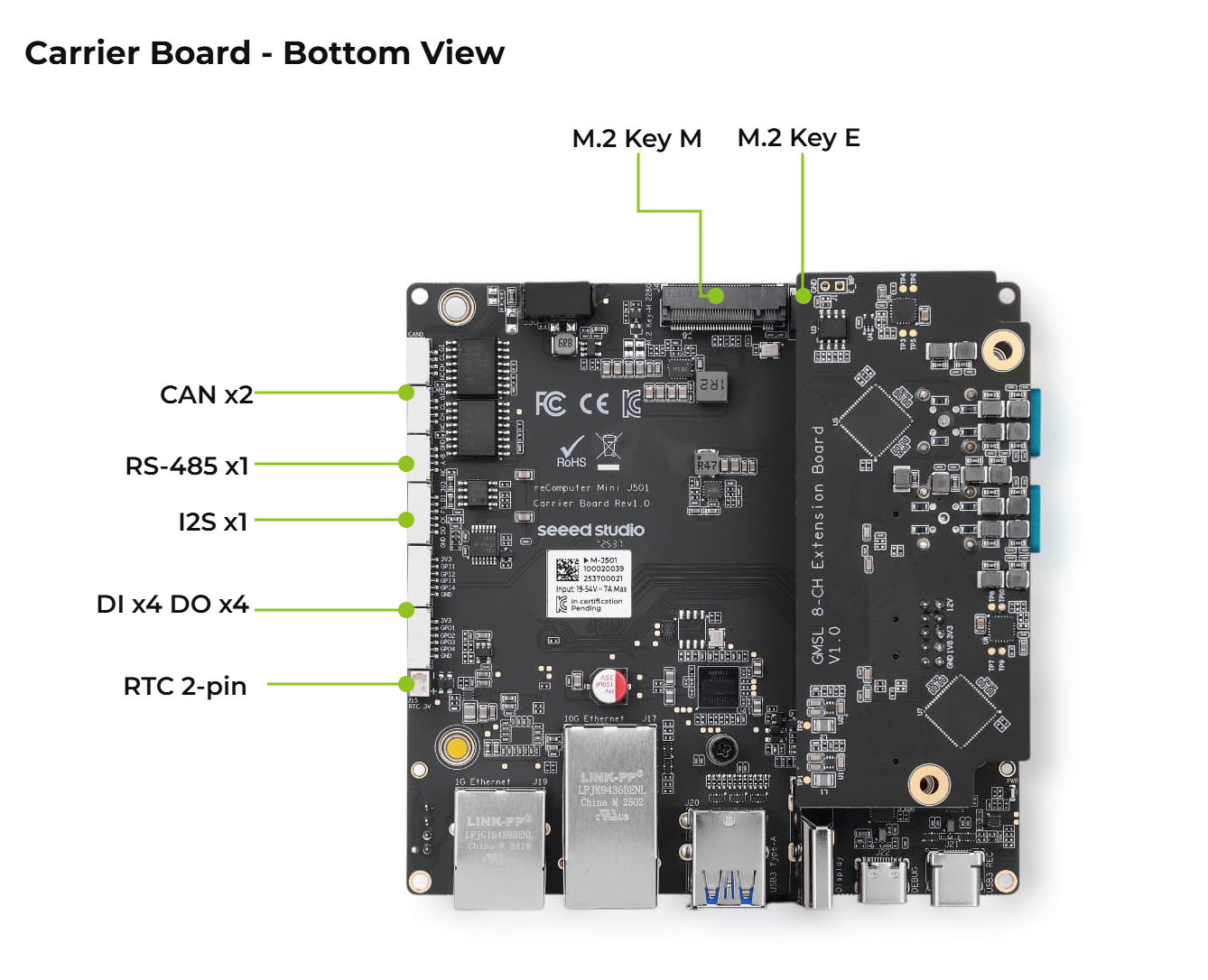 |
📝 清单
- Robotics J501-Mini 载板 x 1
- 电源和 JST 扩展板 x 1
- XT30 转 DC 线缆 x 1
- USB 线缆,Type A 转 Type C x 1
- 扩展板散热片 x 1
- 支柱(M3*30) x 5
- M3 六角螺母 x 5
- Jetson 模块和 M.2 Key M 用螺丝(CM2.5*L.4) x3
- M.2 Key E 用螺丝(CM2*3.0) x1
- M.2 Key B 用支柱(M2*2.0) x1
- M.2 Key B 用螺丝(CM3*4.0) x1
- 用户手册 x 1
1.在高电压供电和高工作温度下,请根据热设计指南设计可靠的散热方案。 2.请为模块安装散热片以获得更佳性能。 3.在高电压输入和高负载运行期间,请勿触摸散热片,以防烫伤。 4.验证阶段电源适配器推荐,请使用 Seeed 官方网站推荐的电源适配器。
- 19V/4.74A 5525 圆孔电源适配器
- 确保满足最大功耗需求。 2.AC 电源线兼容性
- 请根据所在地区购买对应规格的三叶草 AC 电源线。 3.配件兼容性
- 仅使用官方推荐的配件(如无线模块、摄像头、外设),以获得最佳性能和兼容性。
🔍 规格
载板规格
| 类别 | 项目 | 详情 |
|---|---|---|
| 存储 | M.2 KEY M PCIe | 1x M.2 KEY M PCIe(M.2 NVMe 2280 SSD) |
| 网络 | M.2 KEY E | 1x M.2 Key E,用于 WiFi/Bluetooth 模块 |
| 以太网 | 1x RJ45 10GbE && 1x RJ45 1GbE | |
| I/O | USB | 2x USB 3.2 Type-A(10Gbps); 1x USB 2.0 Type C(调试); 1x USB 3.0 Type C(恢复/调试) |
| 摄像头 | 2x 4 合 1 GMSL2 Mini-Fakra 接口(可选); | |
| CAN | 2x CAN JST 4-Pin 接口(GH 1.25); | |
| DI/DO | 1x DI JST 6-Pin 接口(GH 1.25); 1x DO JST 5-Pin 接口(GH 1.25); | |
| I2S | 1x I2S JST 6-Pin 接口(GH 1.25) | |
| RS485 | 1x RS-485 JST 4-Pin 接口(GH 1.25) | |
| UART | 1x UART JST 6-Pin 接口(与 DO 复用) | |
| 显示 | 1x HDMI 2.1 | |
| 风扇 | 1x 4 Pin 风扇接口(12V PWM) | |
| 扩展接口 | 2x 摄像头扩展排针(用于 GMSL2 板) | |
| RTC | 1x RTC 2-pin; | |
| LED | 1x PWR LED,绿色; 1x SSD LED,绿色; 1x USR LED,RGB | |
| 按键 | 1x Recovery 按键; 1x RESET 按键 | |
| 电源 | 19-48V XT30(附带 XT30 转 5525 DC 插孔线缆) | |
| Jetpack 版本 | Jetpack 6.2.1 | |
| 机械特性 | 尺寸 (W x D x H) | 110mm x 110mm x 38mm |
| 重量 | 200g | |
| 安装方式 | 桌面、壁挂 | |
| 工作温度 | -20℃~60℃(25W 模式); -20℃~55℃(MAXN 模式); (搭配 reComputer Robotics 带风扇散热片) | |
| 质保 | 2 年 | |
| 认证 | RoHS, REACH, CE, FCC, UKCA, KC | |
📦 刷写 JetPack OS
支持的模块
前置准备
- Ubuntu 主机 PC
- Robotics J501 Mini 载板
- NVIDIA® Jetson AGX Orin 模块
- Nano/NX 模块主动散热风扇
- NVMe M.2 2280 内置 SSD
- USB Type-C 数据传输线缆
我们建议使用物理 Ubuntu 主机设备,而不是虚拟机。 请参考下表准备主机设备。
| JetPack 版本 | Ubuntu 版本(主机) | ||
| 18.04 | 20.04 | 22.04 | |
| JetPack 6.x | ✅ | ✅ | |
准备 Jetpack 镜像
在这里,我们需要根据所使用的 Jetson 模块,在 Ubuntu PC 上下载对应的系统镜像:
| Jetpack 版本 | Jetson 模块 | GMSL | 下载链接 1 | SHA256 |
|---|---|---|---|---|
| 6.2.1 | AGX Orin 64GB | ✅ | 下载 | f0efee5f265dbaef49dc14d517b269e 7f6582ff9977d9193d377966f36408ec3 |
| AGX Orin 32GB | ✅ | 下载 | 0a97cbb6d708776bd97608594c60c3 4208b5d5dc6efbfc5553edd9c5a95802f6 |
Jetpack6 镜像文件大小约为 14.2GB,下载大约需要 60 分钟,请耐心等待下载完成。
要验证下载固件的完整性,可以对比 SHA256 哈希值。
在 Ubuntu 主机上打开终端,运行命令 sha256sum <File> 获取下载文件的 SHA256 哈希值。如果结果与本维基中提供的 SHA256 值一致,则说明你下载的固件是完整且未损坏的。
⚙️ SEEED Jetson 载板的所有 .dts 文件及其他源代码可从此处下载: Linux_for_Tegra
进入强制恢复模式
在继续安装步骤之前,我们需要确保载板已进入强制恢复模式。
分步操作
步骤 1. 按住按键进入 RESET 模式。

步骤 2. 连接电源线为载板上电,然后松开 REC 按键。
步骤 3. 使用 USB Type-C 数据传输线缆将载板连接到 Ubuntu 主机 PC。
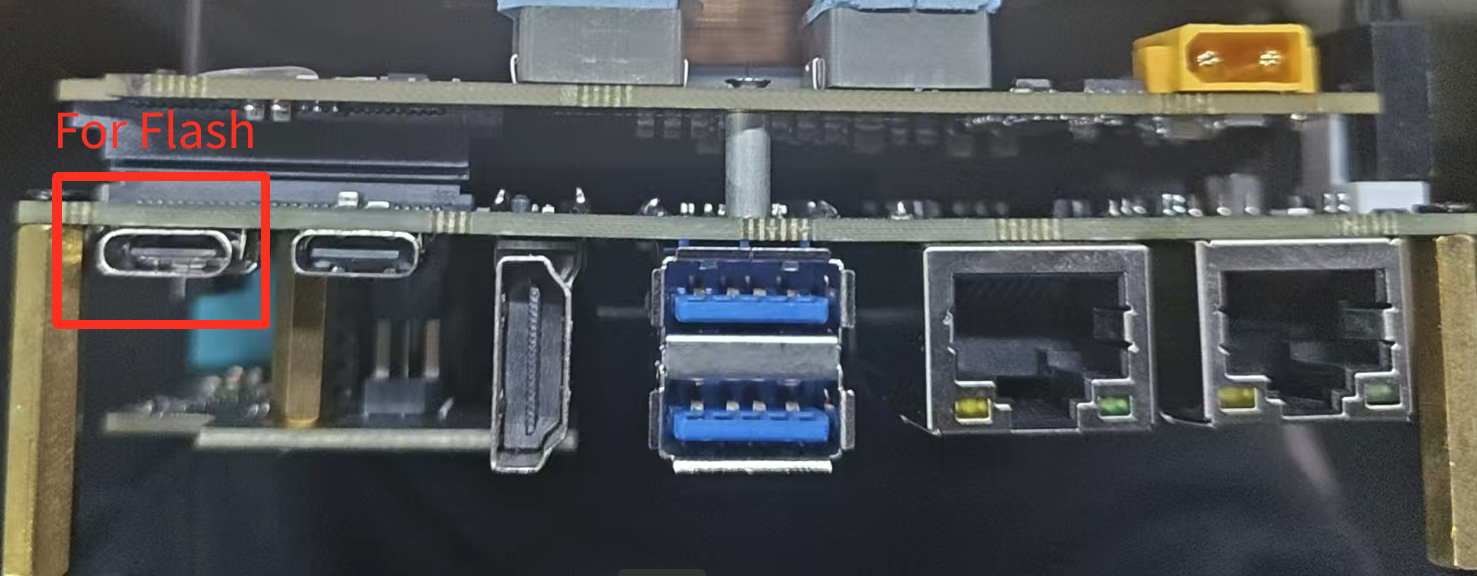
步骤 4. 在 Linux 主机 PC 上打开终端窗口,输入命令 lsusb。如果返回内容中根据你所使用的 Jetson SoM 出现以下任一输出,则说明载板已进入强制恢复模式。
- 对于 AGX Orin 32GB:0955:7223 NVidia Corp
- 对于 AGX Orin 64GB:0955:7023 NVidia Corp
下图适用于 AGX Orin 32GB:

刷写到 Jetson
步骤 1: 解压下载的镜像文件:
cd <path-to-image>
sudo tar xpf mfi_xxxx.tar.gz
# For example: sudo tar xpf mfi_recomputer-mini-agx-orin-32g-j501-6.2.1-36.4.4-2026-02-11.tar.gz
步骤 2: 执行以下命令,将 jetpack 系统刷写到 NVMe SSD:
cd mfi_xxxx
# For example: cd mfi_recomputer-orin-robotics-j501
sudo ./tools/kernel_flash/l4t_initrd_flash.sh --flash-only --massflash 1 --network usb0 --showlogs
如果刷写过程成功,你将看到如下输出

刷写命令可能运行 2-10 分钟。
步骤 3: 将 Robotics J501-Mini 连接到显示器,使用 PD 转 HDMI 转接器连接到支持 HDMI 输入的显示器,或者使用 PD 线缆直接连接到支持 PD 输入的显示器,并完成初始配置设置:

请根据你的需求完成 系统配置。
🔌 接口使用
下面将介绍 Robotics j501-Mini 板上的各类接口以及如何使用它们。
M.2 Key M
M.2 Key M 专为高速 NVMe SSD 设计,为机器人应用提供超高速数据传输。
支持的 SSD 如下
- 128GB NVMe M.2 PCle Gen3x4 2280 Internal SSD
- 256GB NVMe M.2 PCle Gen3x4 2280 Internal SSD
- 512GB NVMe M.2 PCle Gen3x4 2280 Internal SSD
- 1TB NVMe M.2 PCle Gen3x4 2280 Internal SSD
- 2TB NVMe M.2 PCle Gen3x4 2280 Internal SSD
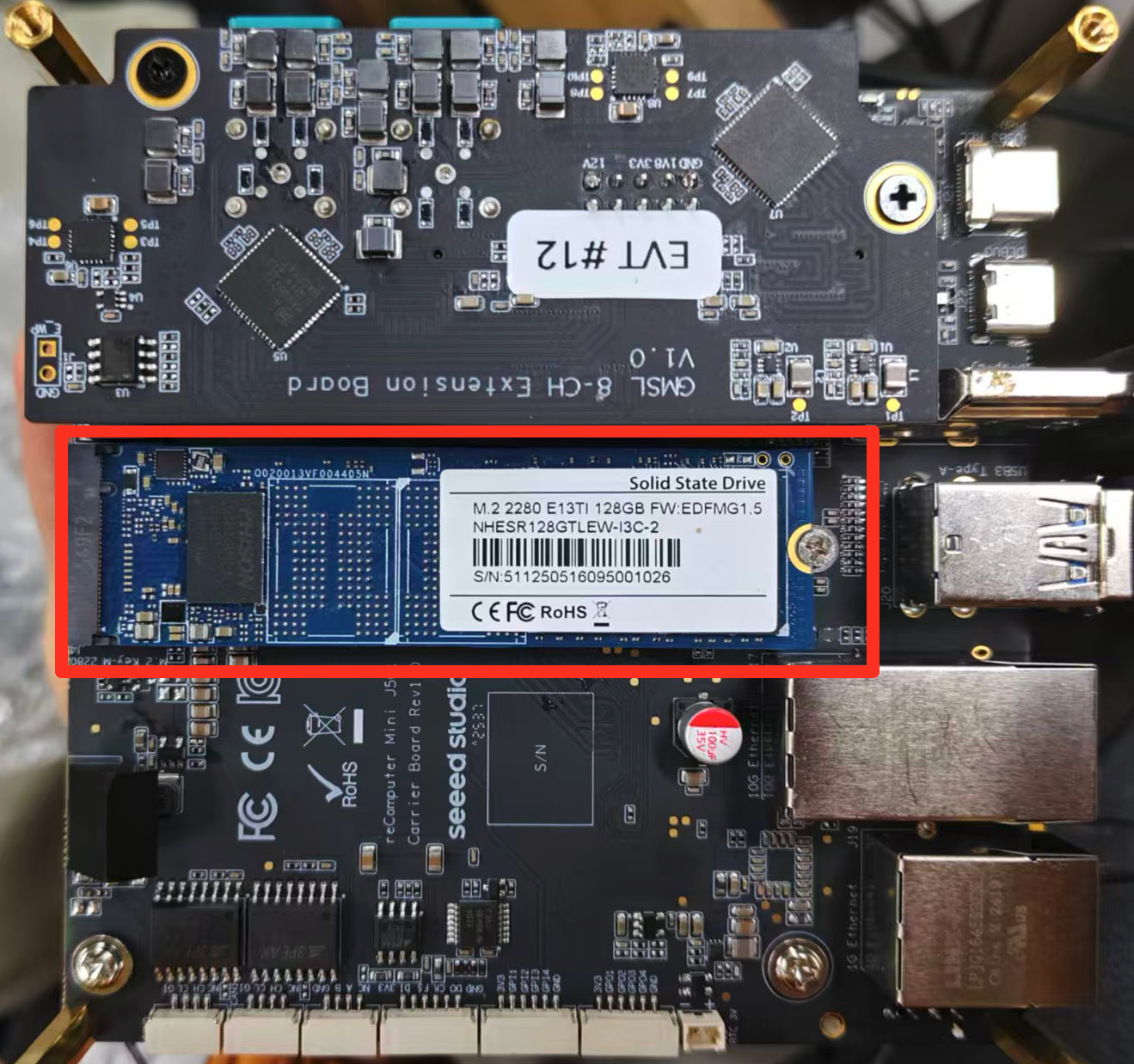
硬件连接
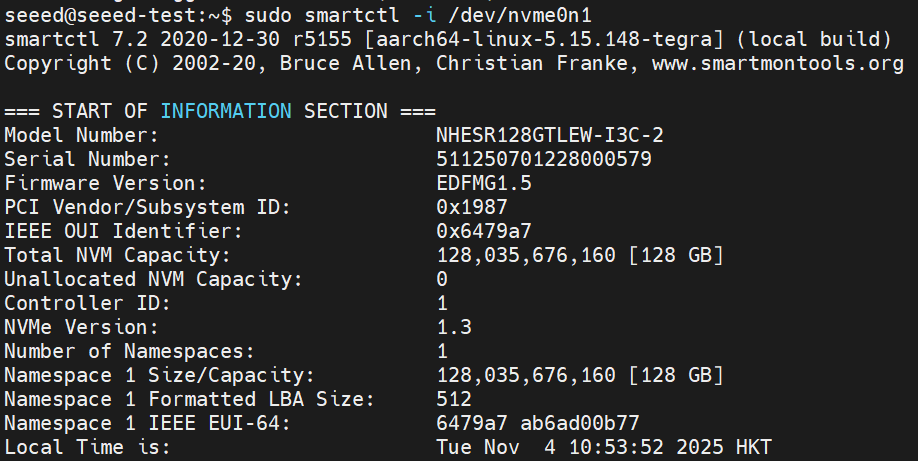
使用说明
在测试 SSD 读写速度之前,你需要在 Jetson 终端中输入以下内容:
sudo apt update
sudo apt install smartmontools
sudo smartctl -i /dev/nvme0n1
创建一个脚本文件来测试 SSD 读写速度:
#You need to create a blank test file first
cat <<'EOF' | sudo tee test_nvme.sh >/dev/null
#!/usr/bin/env bash
set -e
sudo dd if=/dev/zero of=test bs=1000M count=1 conv=fdatasync
sleep 1
sudo sh -c "sync && echo 3 > /proc/sys/vm/drop_caches"
sleep 1
sudo dd if=test of=/dev/null bs=1000M count=1
sudo rm -rf test
EOF
运行脚本以测试 SSD 读写速度:
sudo chmod +x test_nvme.sh
./test_nvme

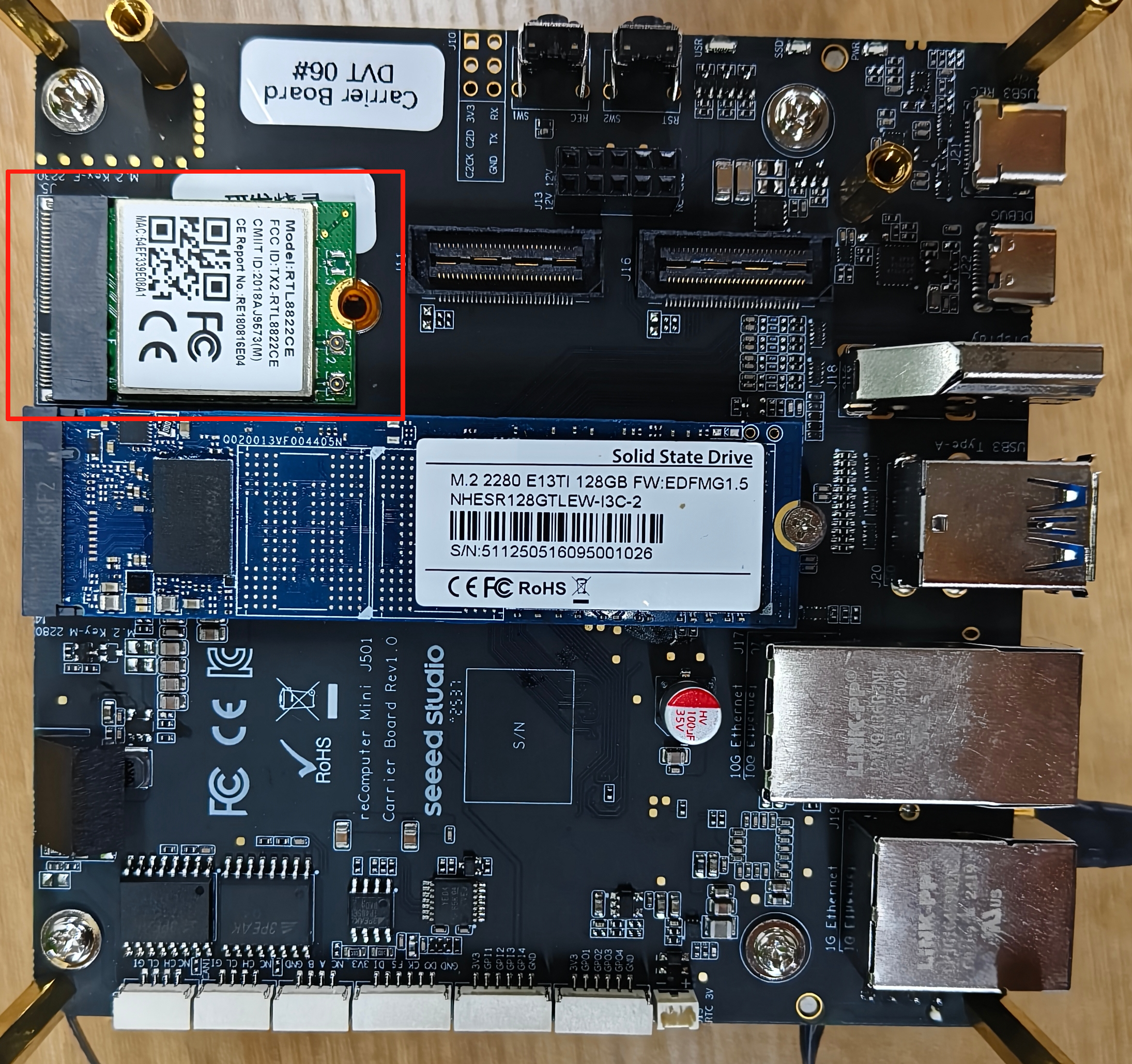
M.2 Key E
M.2 Key E 接口是一个标准的 M.2 连接器,主要用于连接无线模块,例如 Wi-Fi 和蓝牙,以扩展无线通信能力。
硬件连接
使用说明
要测试 Wi-Fi 性能,请使用以下命令(将 IP 地址替换为你的测试服务器):
iperf3 -c 192.168.6.191

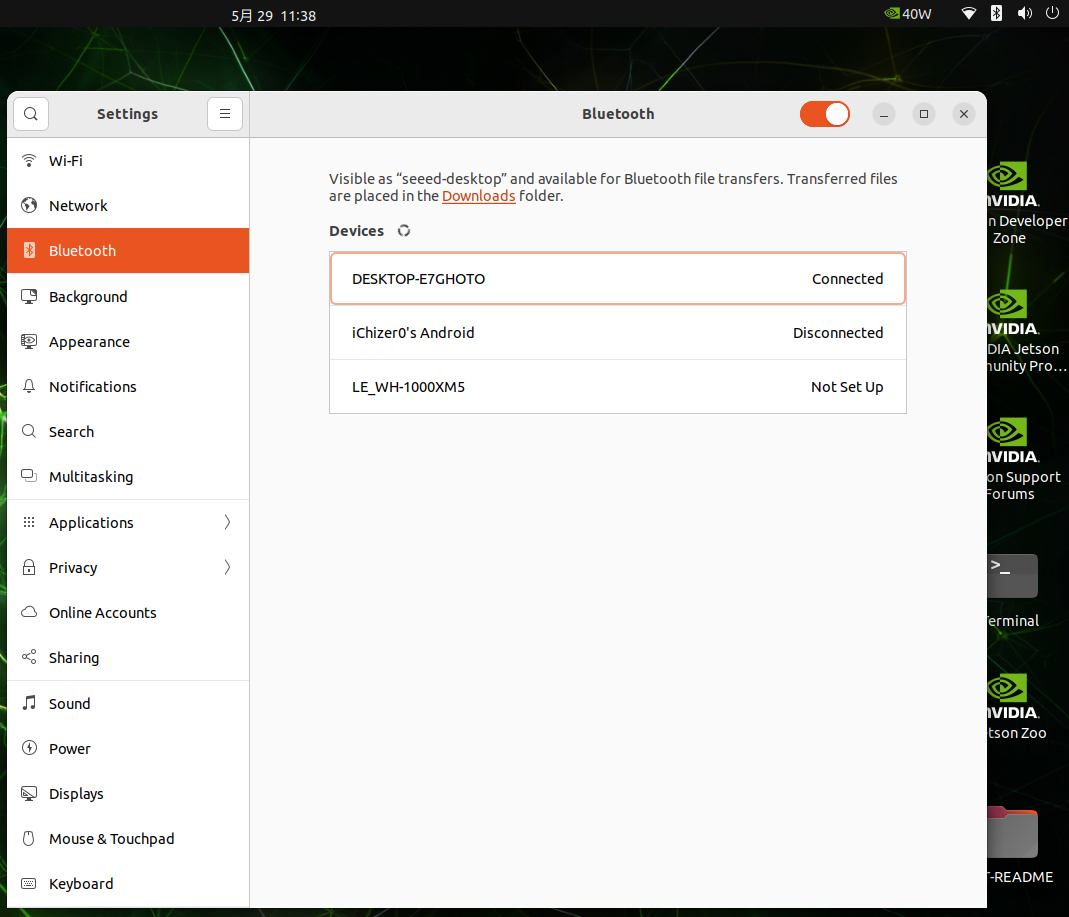
蓝牙功能可通过 M.2 Key E 插槽实现。
以太网
Robotics j501-Mini 载板配备一个 1Gbps 和一个 10Gbps RJ45 以太网端口,用于高速有线网络连接。
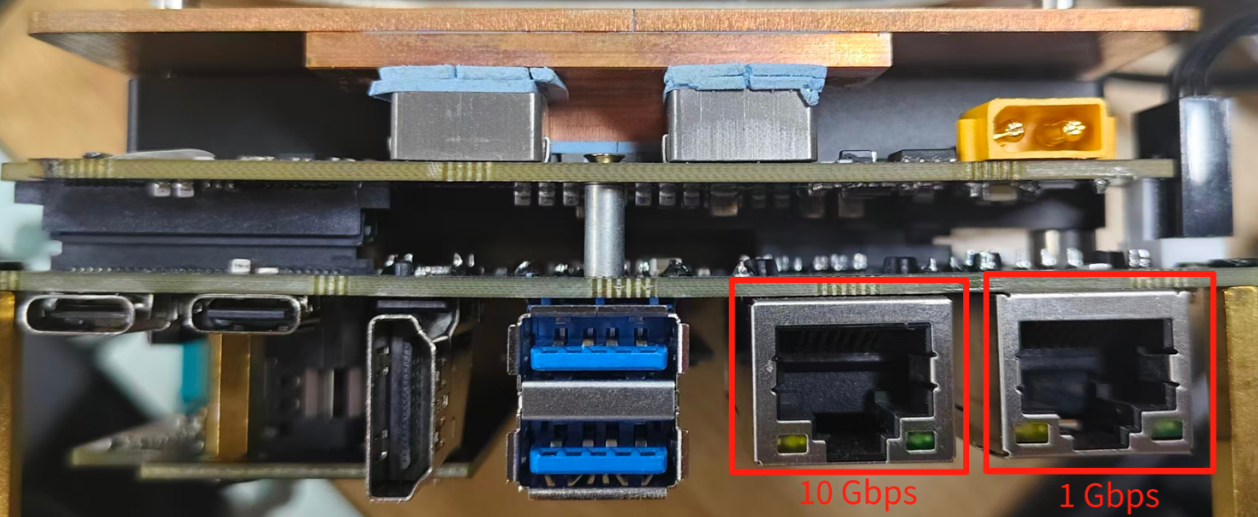
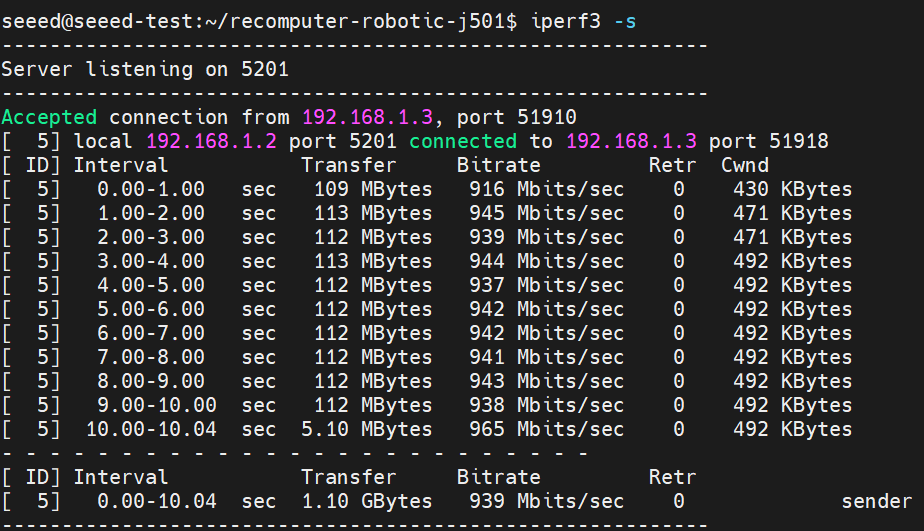
要测试以太网端口速度,请按如下方式使用 iperf3:
iperf3 -c <server_ip> -B <bind_ip>
<server_ip> 是 iperf3 服务器的 IP 地址。客户端将连接到该服务器以执行带宽测试。
<bind_ip> 将指定的本地 IP 地址绑定为测试流量的源地址。
LED
J501 mini 有两个可控的 LED。下面演示如何将 LED 控制为绿色、红色或蓝色。
使用说明
控制 LED 的参考命令如下:
#change to red
echo 1 | sudo tee /sys/class/leds/on-board:red/brightness
echo 0 | sudo tee /sys/class/leds/on-board:red/brightness
#change to green
echo 1 | sudo tee /sys/class/leds/on-board:green/brightness
echo 0 | sudo tee /sys/class/leds/on-board:green/brightness
#change to blue
echo 1 | sudo tee /sys/class/leds/on-board:blue/brightness
echo 0 | sudo tee /sys/class/leds/on-board:blue/brightness
LED 控制效果如下图所示:



USB
Robotics j501-Mini 载板配备多种 USB 接口,包括 2 个 USB 3.2 Type-A 接口(10Gbps)、1 个 USB 3.0 Type-C 接口,以及 1 个用于设备模式/调试的 USB 2.0 Type-C 接口,提供多样化的连接选项。
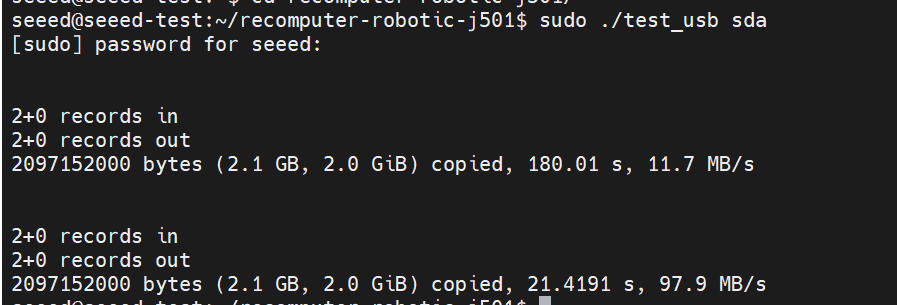
USB-A 速度测试
创建一个脚本来测试 USB 设备速度:
sudo vim test_usb
粘贴以下内容:
cat <<'EOF' | sudo tee test_usb.sh >/dev/null
#!/bin/bash
sudo dd if=/dev/zero of=/dev/$1 bs=1000M count=2 conv=fdatasync
sleep 1
sudo sh -c "sync && echo 3 > /proc/sys/vm/drop_caches"
sleep 1
sudo dd if=/dev/$1 of=/dev/null bs=1000M count=2
EOF
使脚本可执行并进行测试:
sudo chmod +x test_usb
./test_usb
USB 2.0 Type-C 接口
通过此串口,使用 USB-C 数据线,你可以在 PC 端监控输入和输出的调试信息。
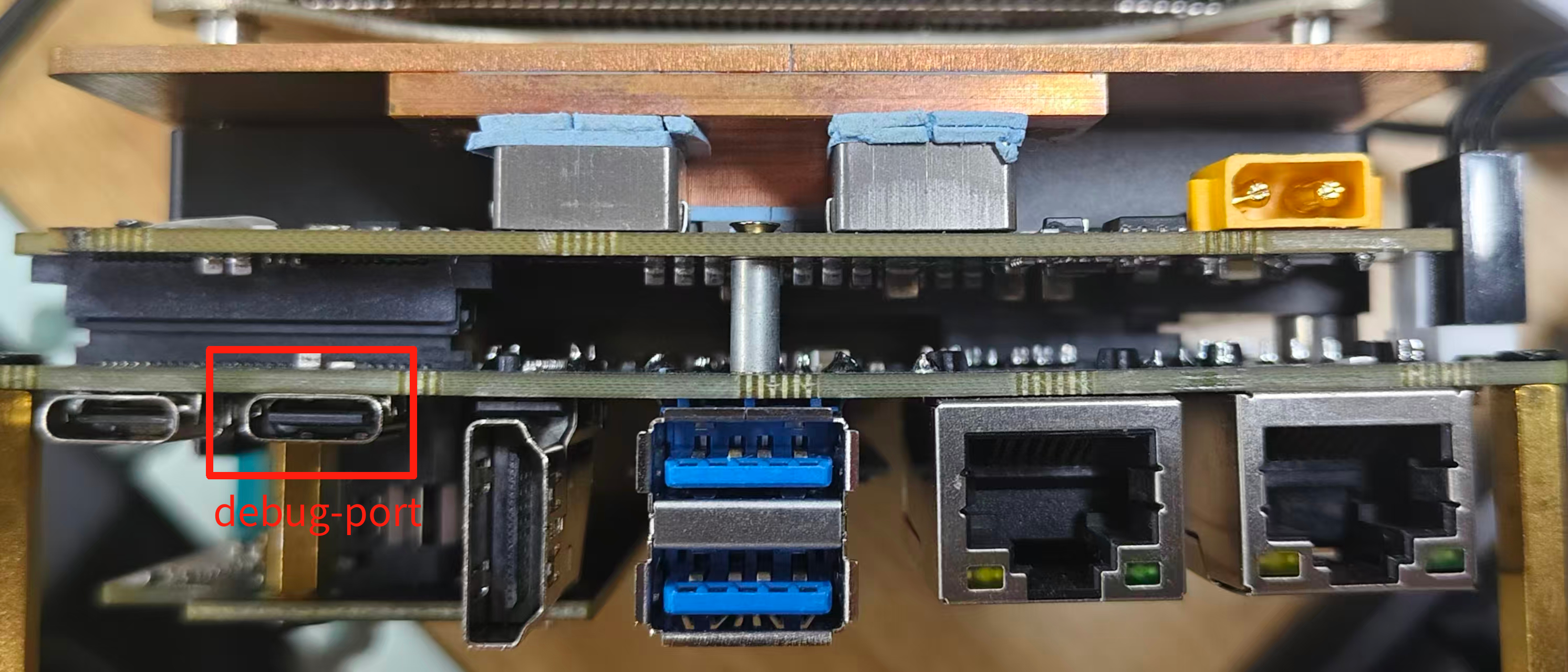
在你的 PC(而不是 Jetson)上,安装一个串口登录工具,并登录到 /dev/ttyUSB0(也可能是 ttyUSB1、2):
sudo apt update
sudo apt install screen
screen /dev/ttyUSB0 115200
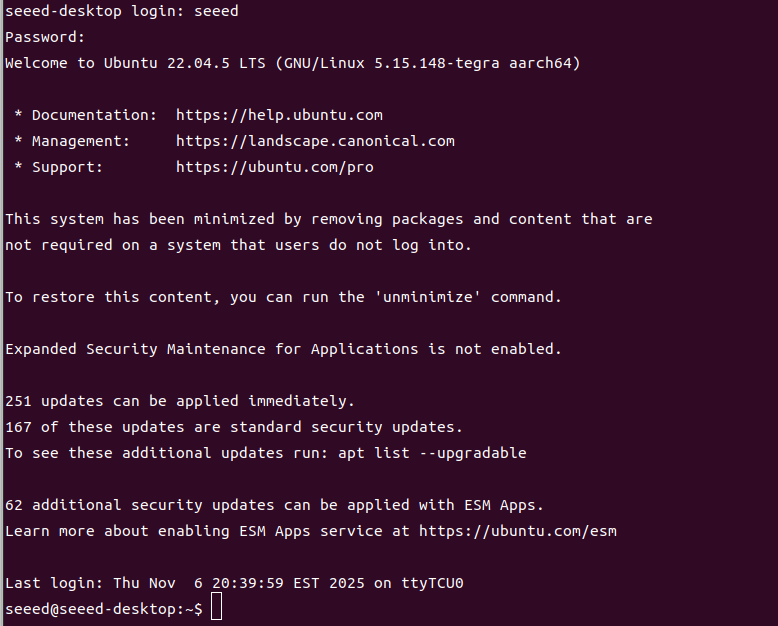
然后,你就可以通过另一台 Linux 主机上的串口控制 Jetson 的终端,如下所示:
风扇
reComputer Jetson Robotics j501-Mini 配备:
- 1x 4-Pin 风扇连接器(12V PWM):兼容标准 12V PWM 风扇,同时支持精确转速控制,非常适合高性能散热需求。
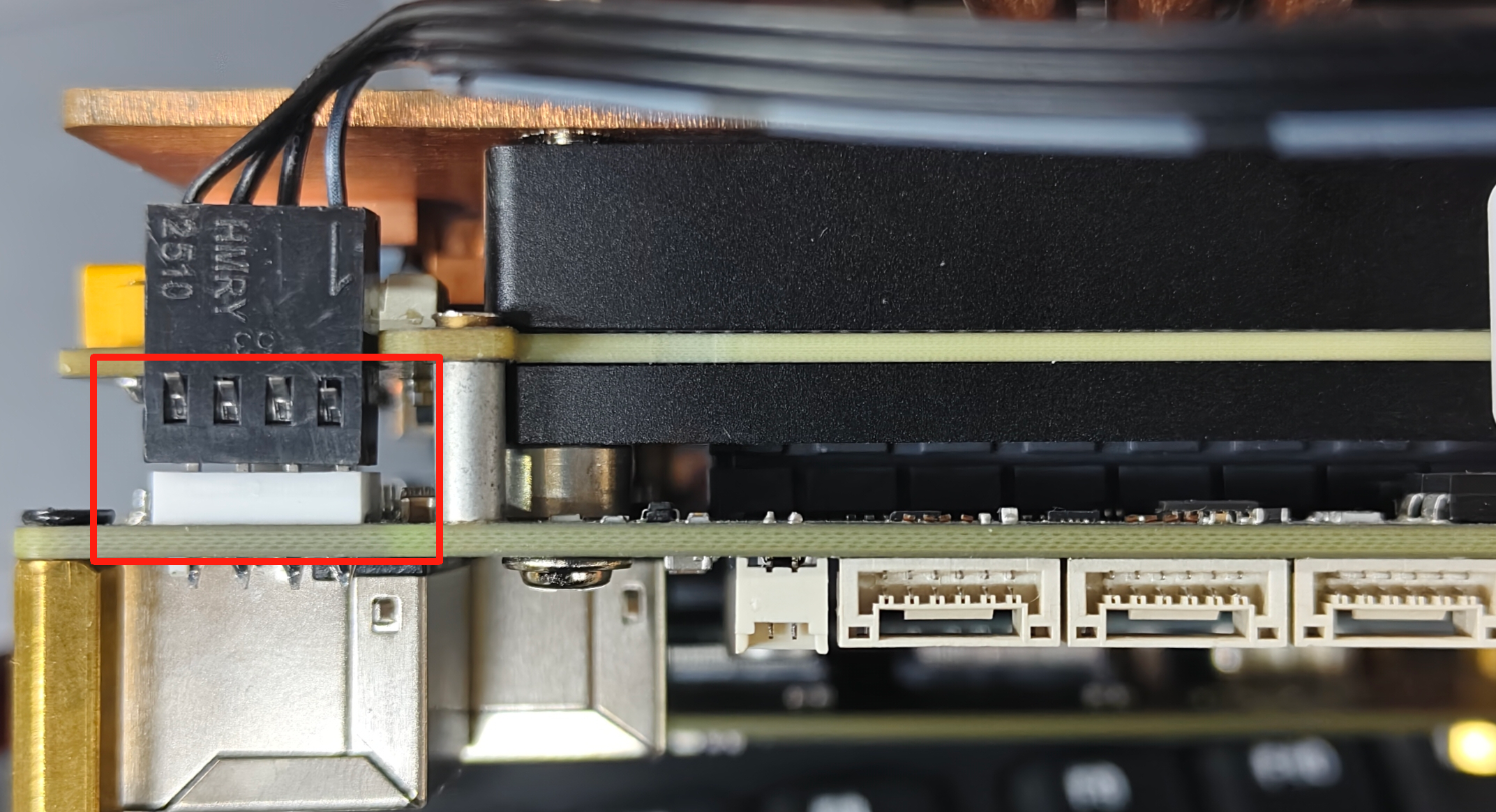
硬件连接
Robotics J501 Mini 提供一个标准的 4 针风扇排针。
风扇(Fan) 数据手册原理图如下所示:
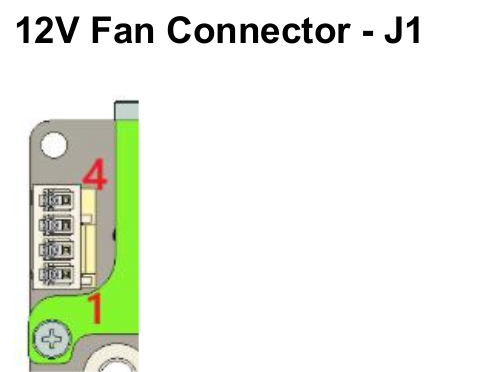
J1 的引脚定义如下:
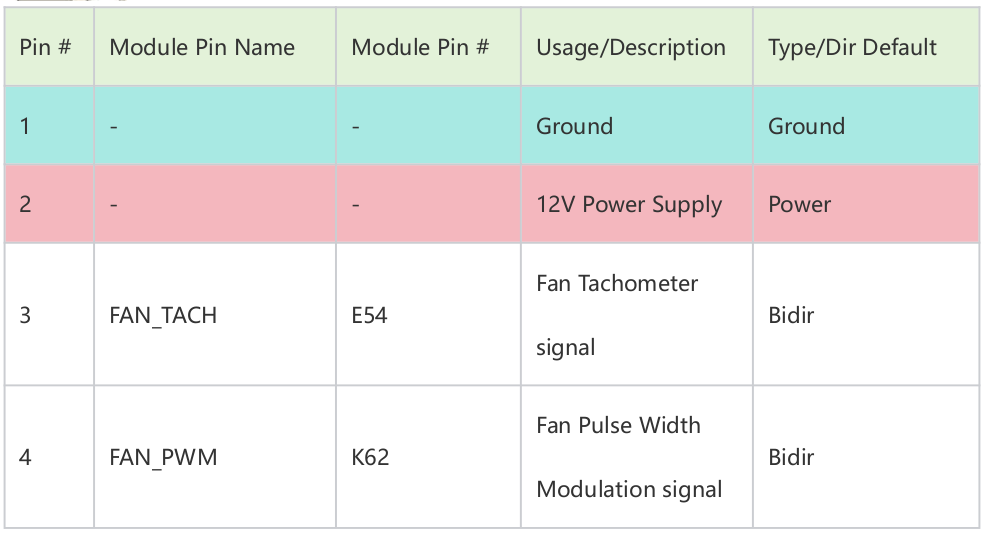
更多信息请查看这里。
使用说明
创建脚本来设置风扇转速:
cat test_fanSpeedSet
粘贴以下内容:
#!/bin/bash
sudo systemctl stop nvfancontrol
sleep 2
echo "000000" | sudo -S chmod 777 /sys/devices/platform/pwm-fan/hwmon/hwmon1/pwm1
echo $1 > /sys/devices/platform/pwm-fan/hwmon/hwmon1/pwm1
此外,我们还可以使用 jtop 工具手动设置风扇转速。
CAN
CAN(控制器局域网,Controller Area Network)是一种可靠的车载总线标准,使微控制器和设备无需主机计算机即可相互通信。
J501 Mini 提供两个集成在 JST 4 针(GH1.25)中的 CAN 接口。此外,这两个 CAN 接口均支持 CAN-FD,CAN0 和 CAN1 如下所示:
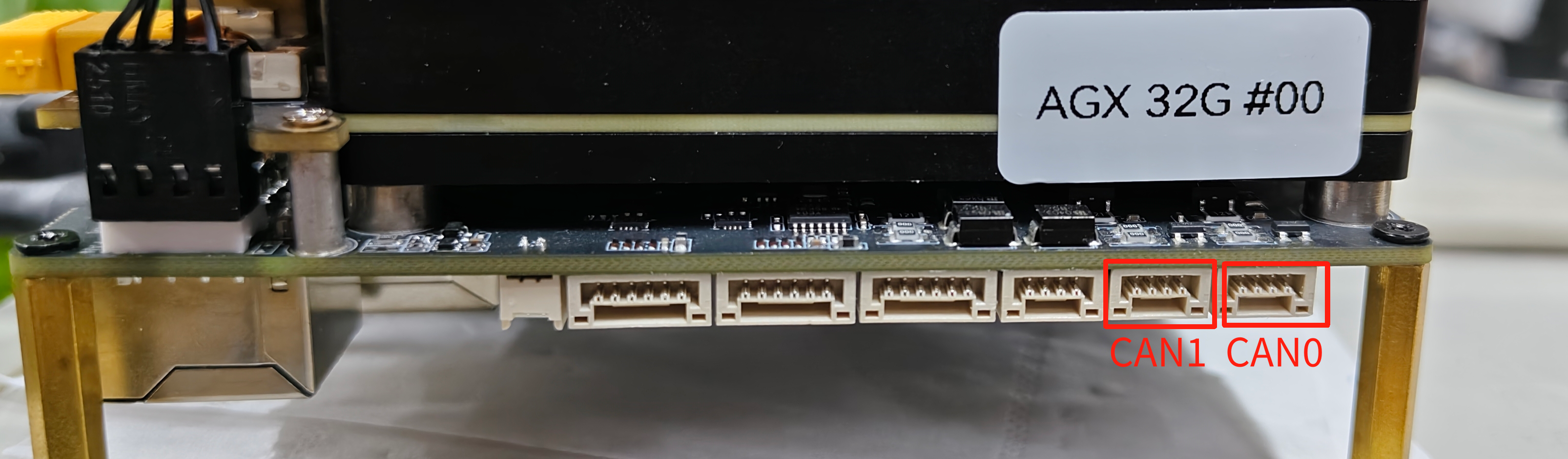
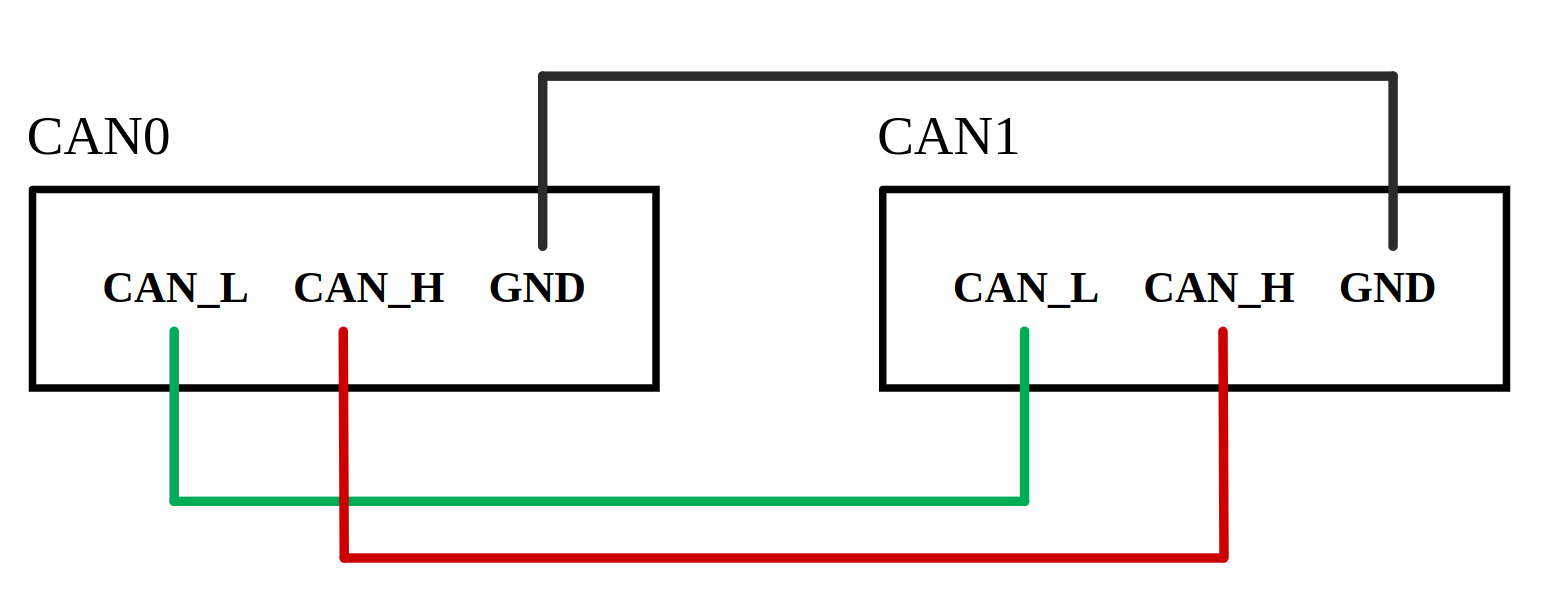
CAN0 和 CAN1 的引脚定义类似,接口示意图如下:
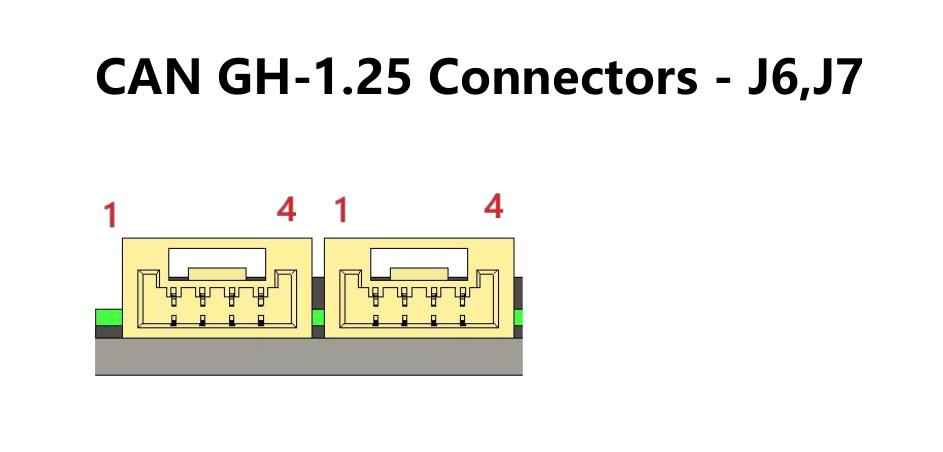
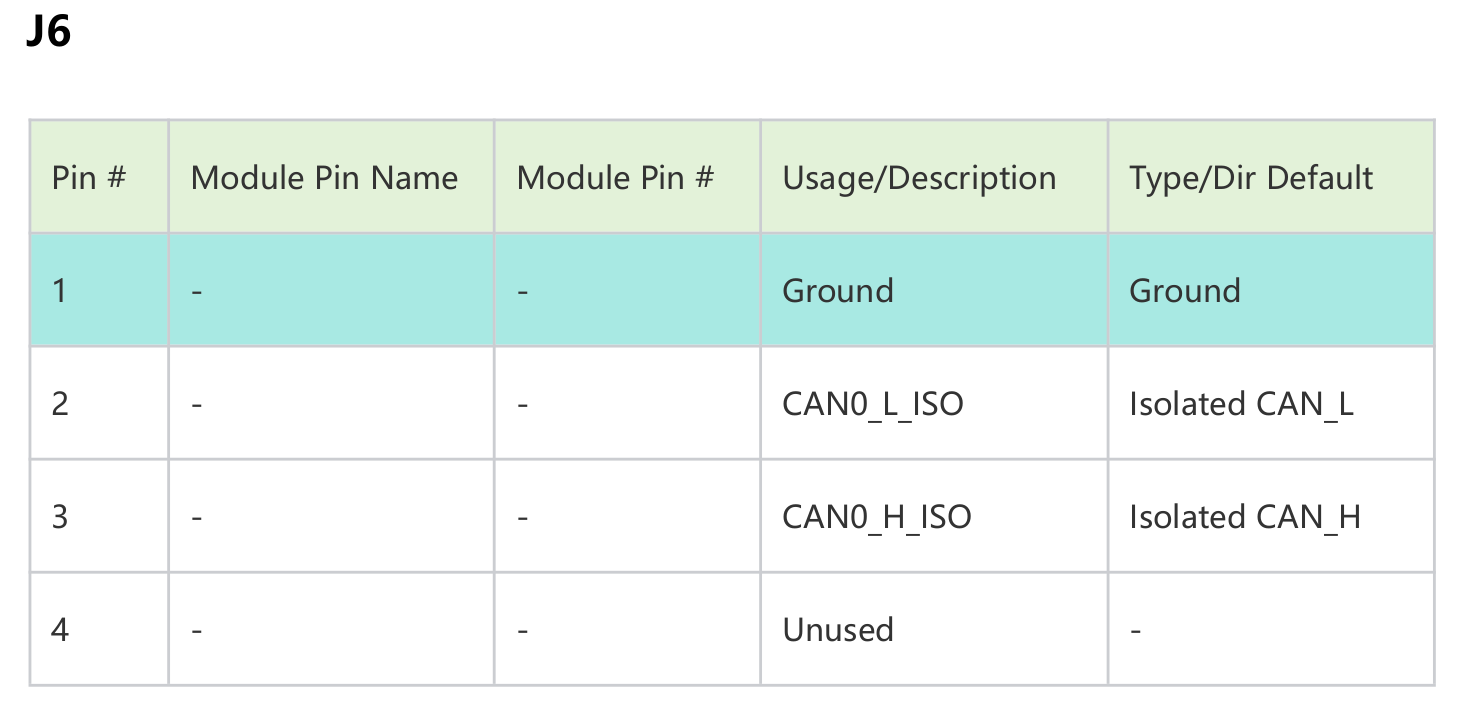
CAN0 对应 J6,其引脚定义如下:
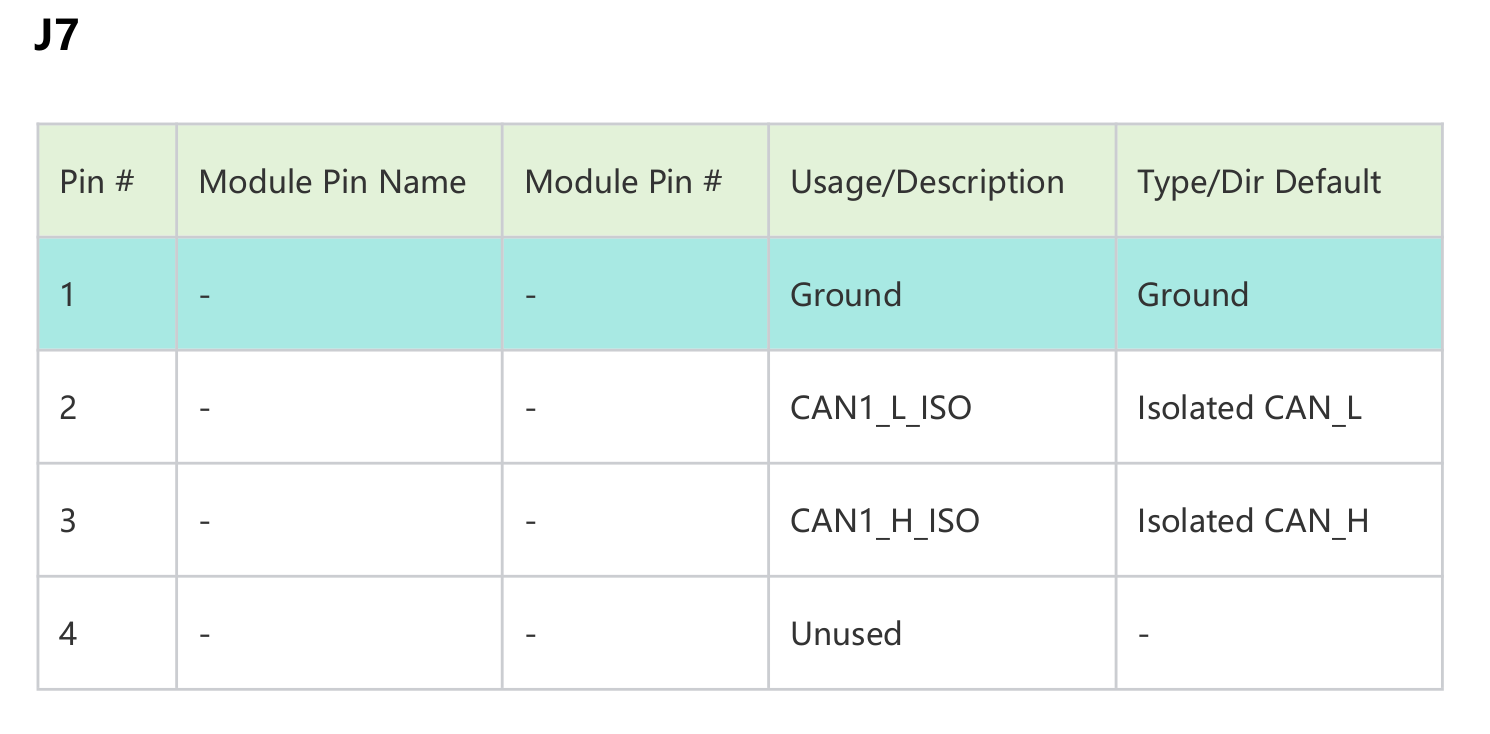
CAN1 对应 J7,其引脚定义如下:
CAN 通信
本节将连接 Jetson 上的 CAN0 和 CAN1,演示如何在 Classic CAN mode 和 CAN-FD mode 下在 CAN0 与 CAN1 之间收发数据。
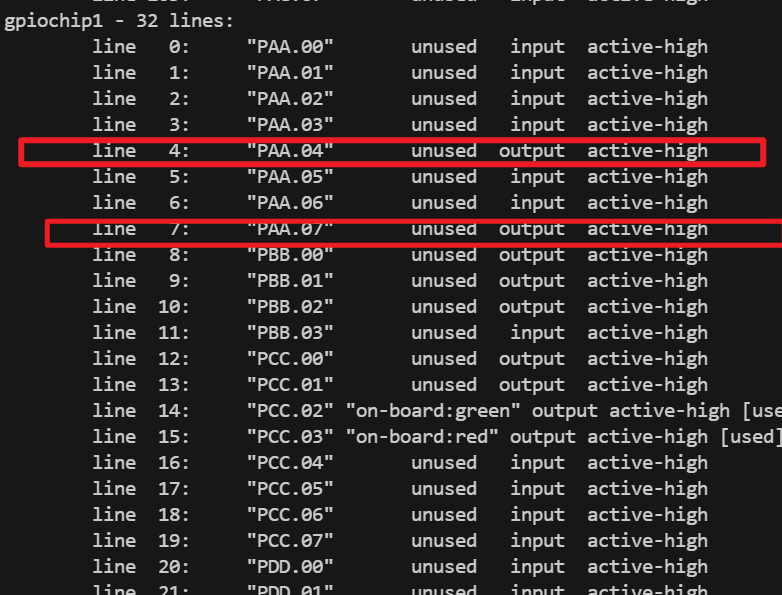
CAN0 和 CAN1 的终端电阻可以通过两个引脚进行控制:PAA.04(位于 gpiochip1 的 line4)和 PAA.07(位于 gpiochip1 的 line7)。
终端电阻控制遵循以下规则:
When `PAA.04 = 1`, the 120 Ω termination resistor of CAN0 is **disconnected**;
when `PAA.04 = 0`, the 120 Ω termination resistor of CAN0 is **connected**.
When `PAA.07 = 1`, the 120 Ω termination resistor of CAN1 is **disconnected**;
when `PAA.07 = 0`, the 120 Ω termination resistor of CAN1 is **connected**.
输入以下命令查看 gpiochip 1 上的引脚:
gpioinfo gpiochip1
参考以下命令将 PAA.04 和 PAA.07 设为 0:
sudo gpioset --mode=wait gpiochip1 4=0
sudo gpioset --mode=wait gpiochip1 7=0
参考以下命令将 PAA.04 和 PAA.07 设为 1:
sudo gpioset --mode=wait gpiochip1 4=1
sudo gpioset --mode=wait gpiochip1 7=1
Classic CAN 模式
创建 test_can.sh,用于在标准模式下测试 CAN0 与 CAN1 之间的数据收发:
touch test_can.sh
chmod +x test_can.sh
sudo ./tets_can.sh
test_can.sh 的脚本代码如下:
test_can.sh
#!/bin/bash
echo "000000" | sudo -S ip link set can0 down
echo "000000" | sudo -S ip link set can1 down
# set buffer size
echo "000000" | sudo -S sysctl -w net.core.rmem_max=524288
echo "000000" | sudo -S sysctl -w net.core.wmem_max=524288
echo "000000" | sudo -S sysctl -w net.core.rmem_default=524288
echo "000000" | sudo -S sysctl -w net.core.wmem_default=524288
#set to 2M bps
echo "000000" | sudo -S ip link set can0 type can bitrate 2000000
echo "000000" | sudo -S ip link set can0 up
echo "000000" | sudo -S ip link set can1 type can bitrate 2000000
echo "000000" | sudo -S ip link set can1 up
sleep 2
#Enable 5s to test
sudo pkill -f gpioset
gpioset --mode=time --sec=200000 gpiochip1 7=0 &
GPIO1_PID=$!
gpioset --mode=time --sec=200000 gpiochip1 4=0 &
GPIO2_PID=$!
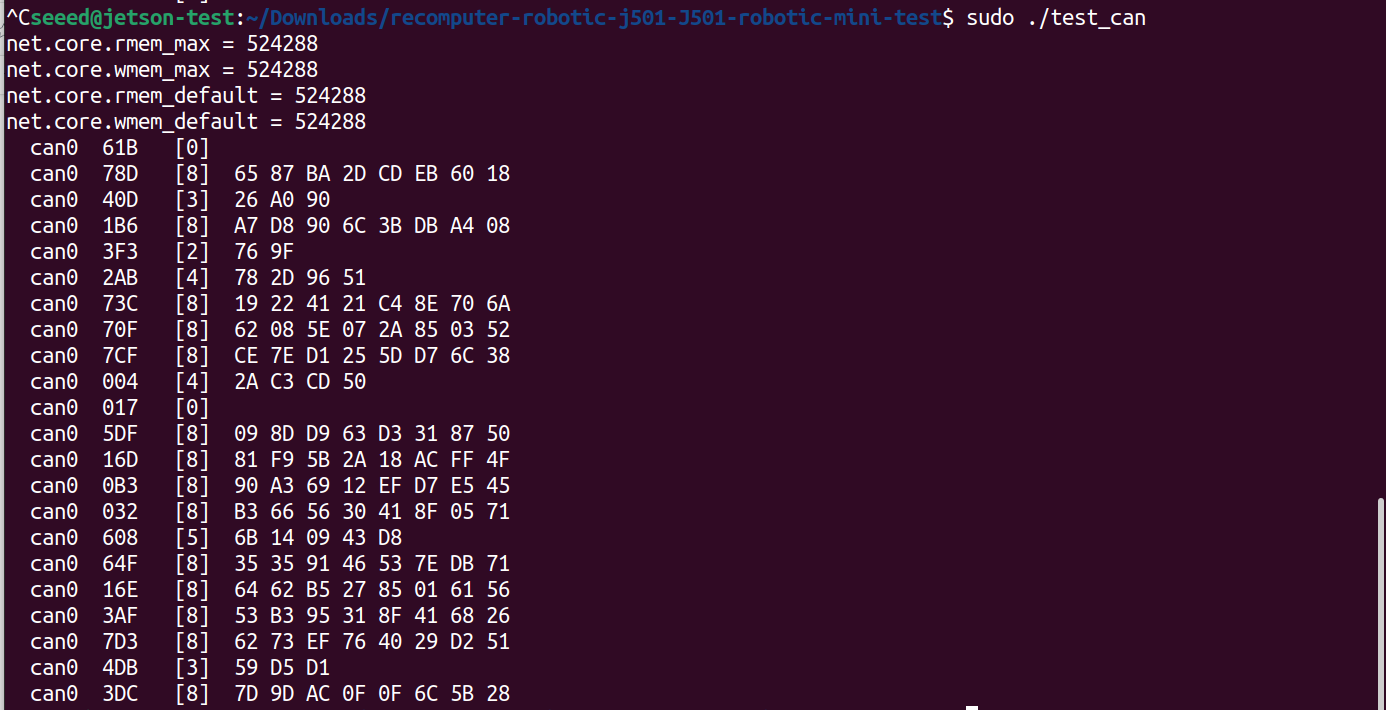
cangen can1 &
candump can0
CAN0 与 CAN1 之间的数据收发将完成:
CAN-FD 模式
在 datasheet 中,你可以找到如下所示的 CAN0/CAN1 接口接线图:
创建 test_canfd.sh,用于在 CAN-FD 模式下测试 CAN0 与 CAN1 之间的数据收发:
touch test_canfd.sh
chmod +x test_can.sh
sudo ./tets_can.sh
test_canfdfd.sh 的脚本代码如下:
test_canfd.sh
#!/bin/bash
# configure CAN FD mode
#CAN bus rate set to 500 kbps, data rate set to 5 Mbps.
echo "000000" | sudo -S ip link set can0 down
echo "000000" | sudo -S sudo ip link set can0 type can bitrate 500000 dbitrate 5000000 berr-reporting on fd on restart-ms 100
echo "000000" | sudo -S ip link set can0 up
echo "000000" | sudo -S ip link set can1 down
echo "000000" | sudo -S sudo ip link set can1 type can bitrate 500000 dbitrate 5000000 berr-reporting on fd on restart-ms 100
echo "000000" | sudo -S ip link set can1 up
# config buffer size
echo "000000" | sudo -S sysctl -w net.core.rmem_max=524288
echo "000000" | sudo -S sysctl -w net.core.wmem_max=524288
echo "000000" | sudo -S sysctl -w net.core.rmem_default=524288
echo "000000" | sudo -S sysctl -w net.core.wmem_default=524288
# check CAN FD status
echo "CAN0 status:"
ip -details link show can0
echo "CAN1 status:"
ip -details link show can1
#Enable 5s to test
sudo pkill -f gpioset
gpioset --mode=time --sec=200000 gpiochip1 7=0 &
GPIO1_PID=$!
gpioset --mode=time --sec=200000 gpiochip1 4=0 &
GPIO2_PID=$!
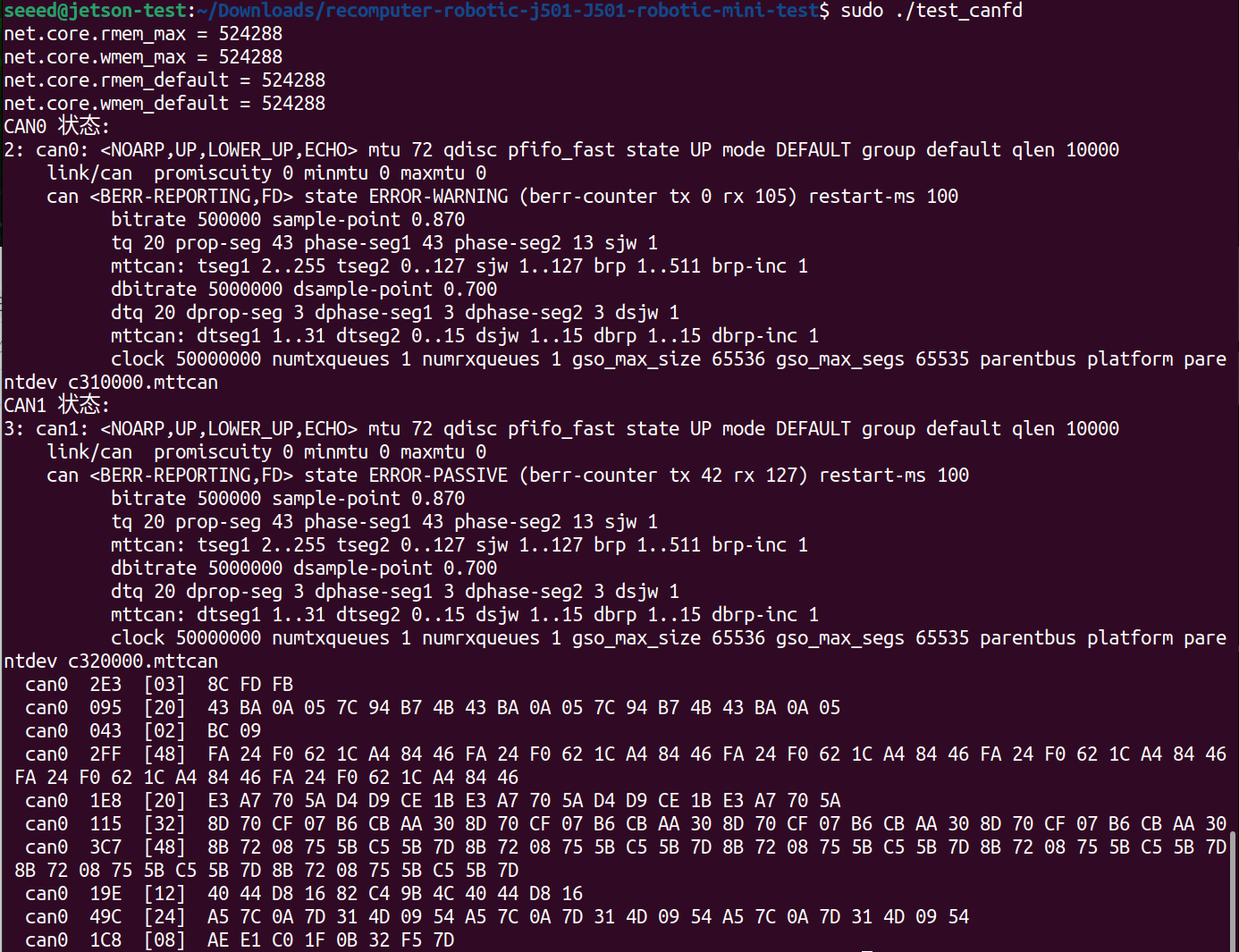
candump can0 &
cangen can1 -f
CAN0 与 CAN1 之间的数据收发将完成:
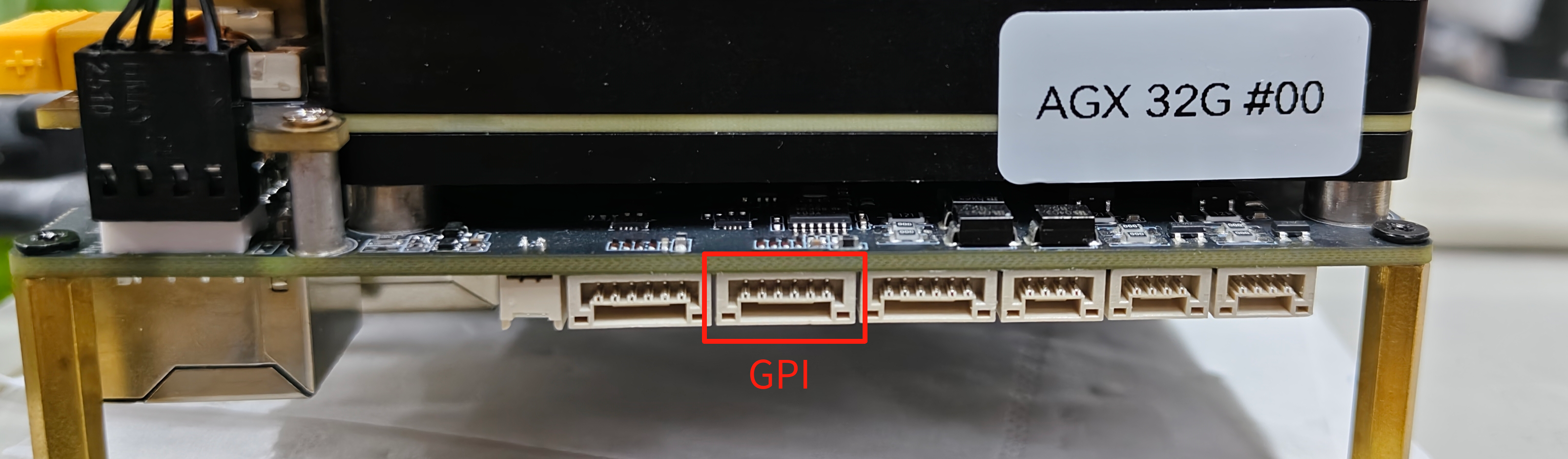
GPI && GPO
GPI
Robotics J501 Mini 为 GPI 提供了一个标准的 6 针 JST 接口。
GPI 的数据手册原理图如下所示:
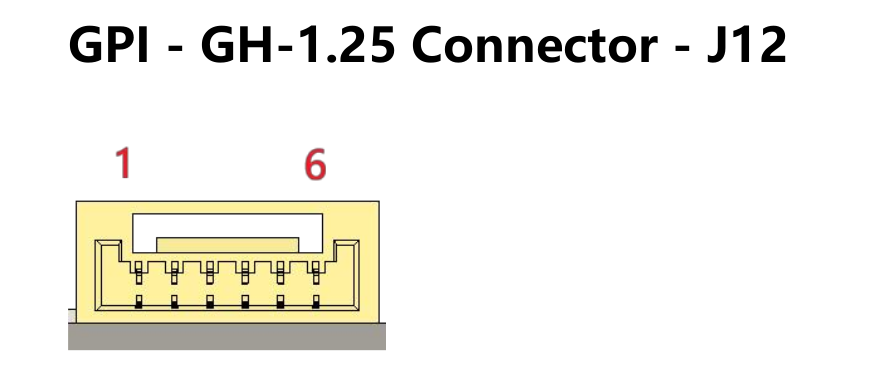
J12 的引脚定义如下:
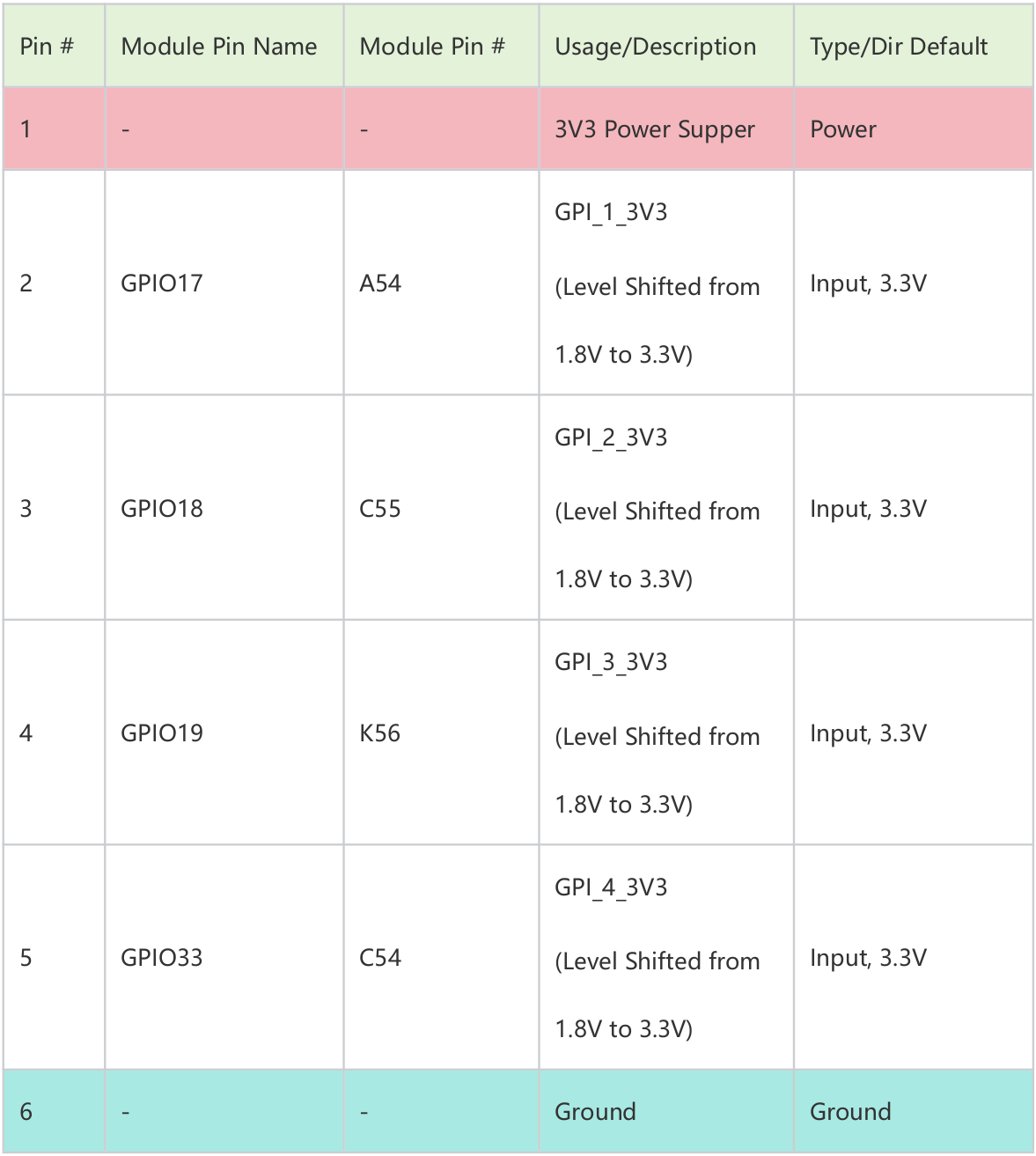
使能 GPI 1 到 GPI 4 以读取输入状态:
sudo gpioset --mode=wait 0 131=0
要读取 GPI 1 到 GPI 4 的输入,请参考以下命令:
sudo gpioget 0 96 #read the input of GPI 1
sudo gpioget 0 104 #read the input of GPI 2
sudo gpioget 0 86 #read the input of GPI 3
sudo gpioget 0 83 #read the input of GPI 4
当读取为高电平时,将返回 1;当读取为低电平时,将返回 0。
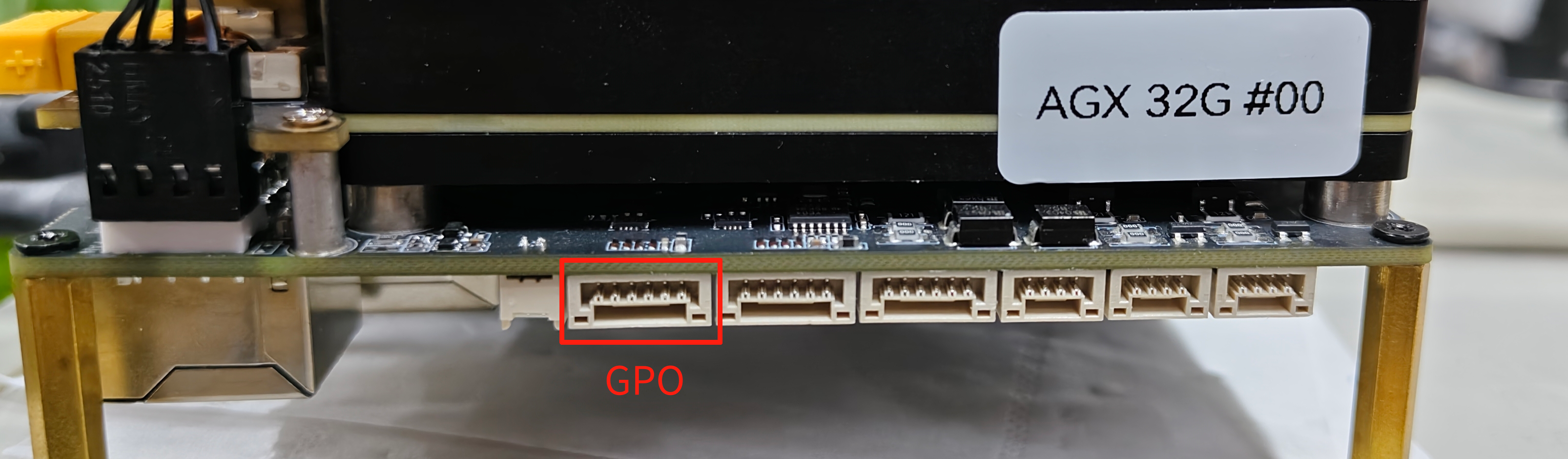
GPO
Robotics J501 Mini 为 GPO 提供了一个标准的 6 针 JST 接口。
GPO 的数据手册原理图如下所示:
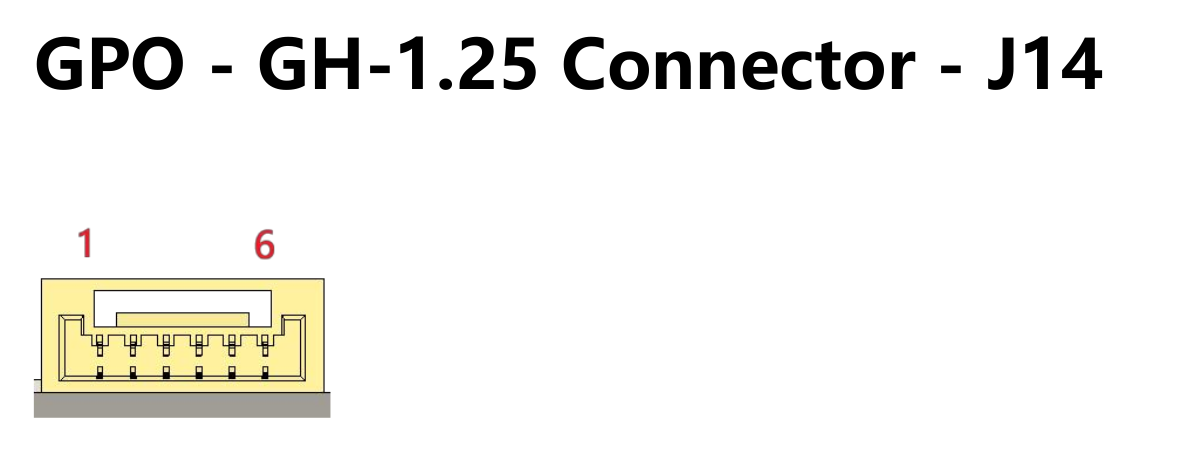
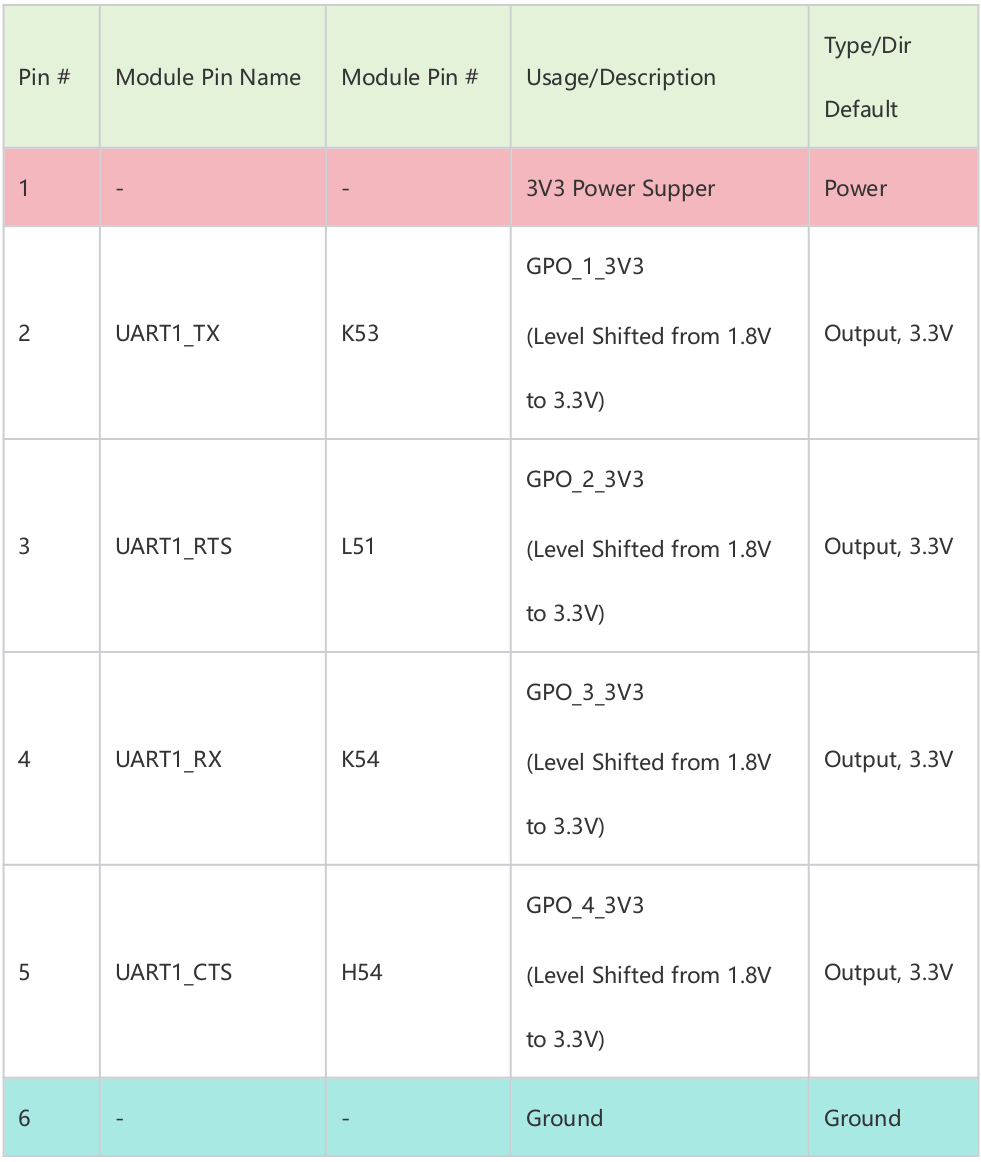
J14 的引脚定义如下:
使能 GPO 1 到 GPO 4 以输出状态:
sudo gpioset --mode=wait 0 79=1
要设置 GPO 1 到 GPO 4 的输出,请参考以下命令:
sudo gpioset --mode=wait 0 110=1 #set output of GPO 1 to high voltag
sudo gpioset --mode=wait 0 112=1 #set output of GPO 2 to high voltag
sudo gpioset --mode=wait 0 111=1 #set output of GPO 3 to high voltag
sudo gpioset --mode=wait 0 113=1 #set output of GPO 4 to high voltag
sudo gpioset --mode=wait 0 110=1 #set output of GPO 1 to low voltag
sudo gpioset --mode=wait 0 112=1 #set output of GPO 2 to low voltag
sudo gpioset --mode=wait 0 111=1 #set output of GPO 3 to low voltag
sudo gpioset --mode=wait 0 113=1 #set output of GPO 4 to low voltag
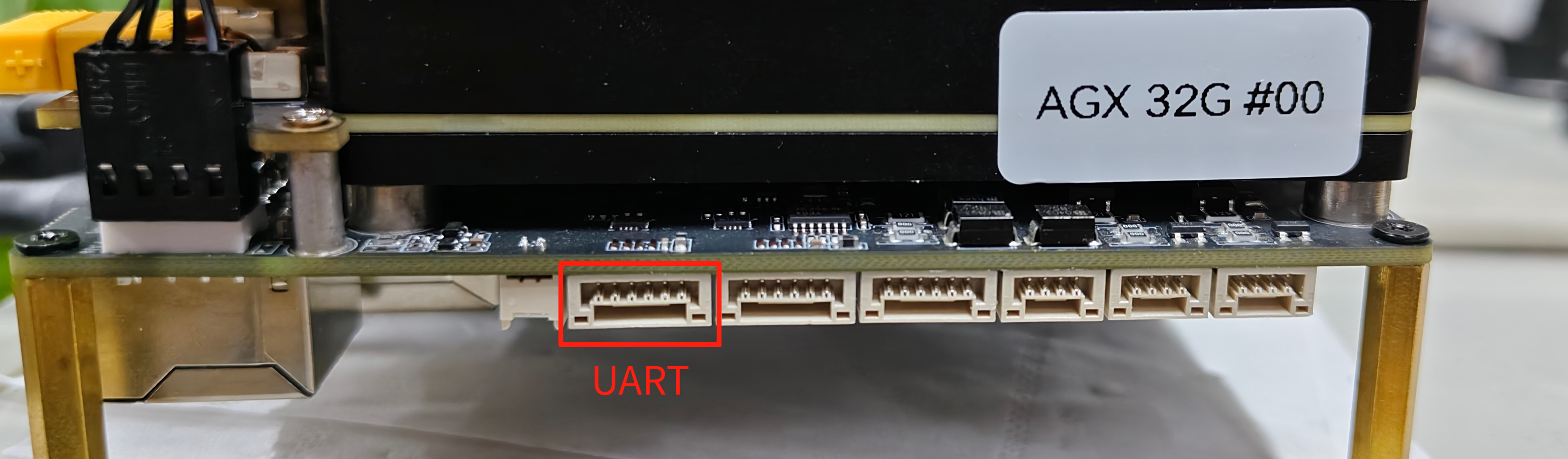
UART
Robotics J501 Mini 为 UART 串口通信提供了一个标准的 6 针 JST 接口。 UART 和 GPO 使用同一个 JST 接口。该接口默认具有 GPO 功能。如果你需要切换为 UART 功能,必须指向新的设备树并重启设备,变更才会生效。
对于 UART 通信,请按照以下接线方式进行。这里以 USB 转 TTL 工具为例。
UART 的数据手册原理图如下所示:
J14 的引脚定义如下:
UART 和 GPO 共享同一个物理接口。默认情况下,该接口作为 GPO 使用。如果你需要切换为 UART,请参考本节内容。
对于不同的模组,你需要下载对应的设备树文件。
AGX Orin 32G 的 .dtb 下载链接:
https://files.seeedstudio.com/wiki/recomputer-j501-mini/tegra234-j501x-0000%2Bp3701-0004-recomputer-mini.dtb
AGX Orin 64G 的 .dtb 下载链接:
https://files.seeedstudio.com/wiki/recomputer-j501-mini/tegra234-j501x-0000%2Bp3701-0005-recomputer-mini.dtb
将设备树复制到指定路径:
# AGX Orin 32G
sudo cp tegra234-j501x-0000%2Bp3701-0004-recomputer-mini.dtb /boot/
# AGX Orin 64G
sudo cp tegra234-j501x-0000%2Bp3701-0005-recomputer-mini.dtb /boot/
备份并修改 /boot/extlinux/extlinux.conf,添加一行指向新的 .dtb 文件:
sudo cp /boot/extlinux/extlinux.conf /boot/extlinux/extlinux.conf.bak
sudo vim /boot/extlinux/extlinux.conf
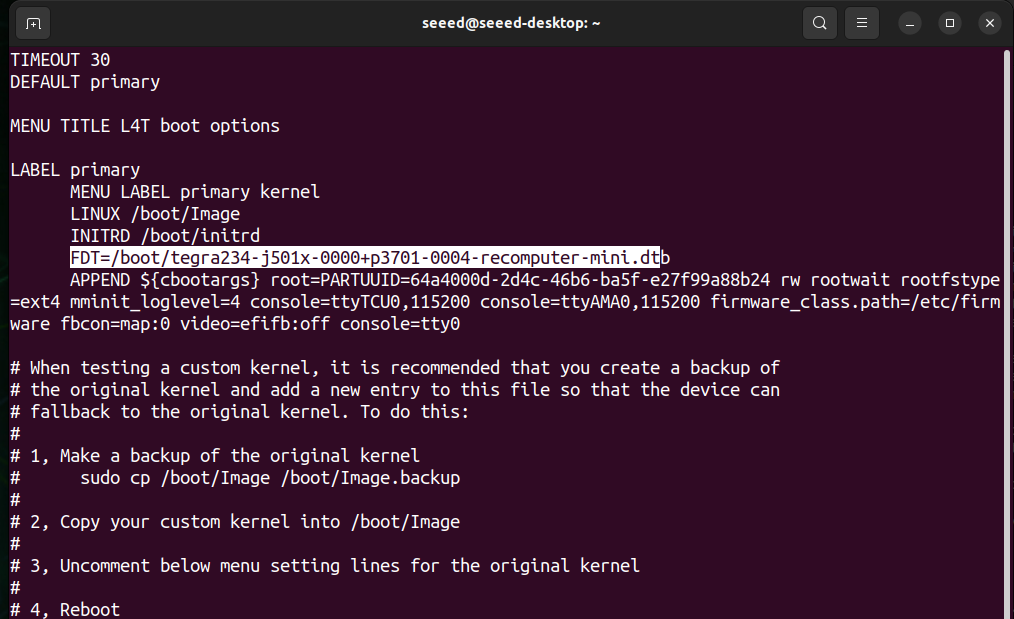
根据你所使用的设备树文件名,在 extlinux.conf 中添加一行 FDT=/your_path。以 AGX Orin 32G 为例:
LABEL primary
MENU LABEL primary kernel
LINUX /boot/Image
INITRD /boot/initrd
FDT=/boot/tegra234-j501x-0000+p3701-0004-recomputer-mini.dtb
6 针 JST 排针 UART 在 Jetson 上映射为 /dev/ttyTHS1。你可以使用 minicom 查看串口数据的收发情况:
sudo apt install minicom
sudo minicom -D /dev/ttyTHS1
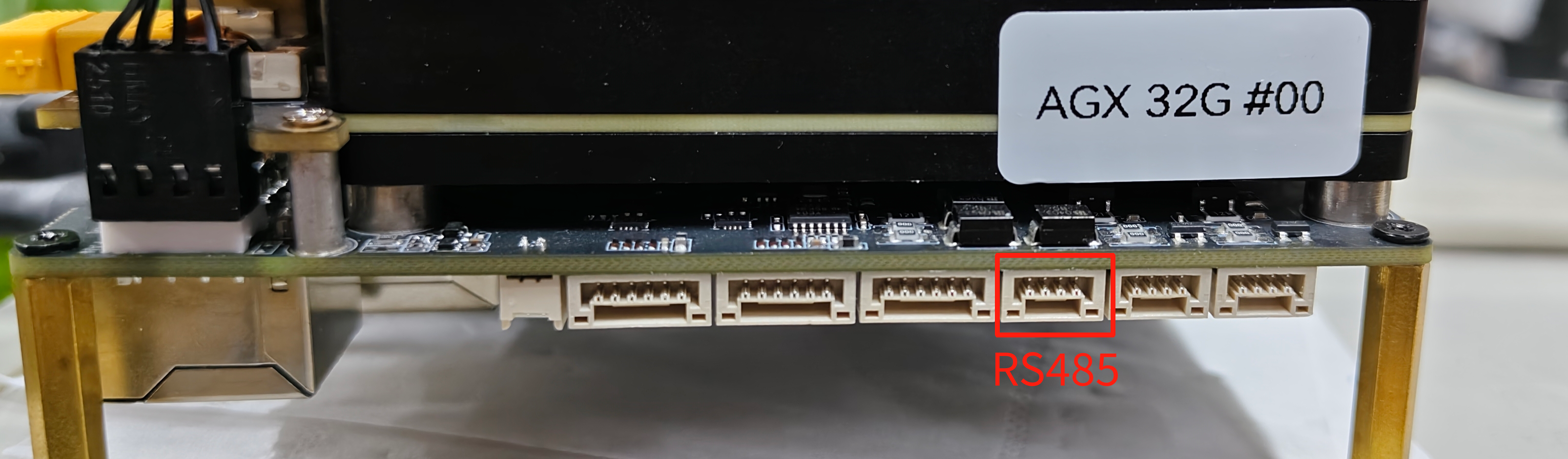
RS485
RS485 接口提供了一个稳健且抗噪的差分通信通道,常用于工业环境。它支持远距离、多点串行通信,非常适合连接传感器、电机控制器、PLC 以及其他工业设备。
硬件连接
Robotics J501-Mini 提供了一个用于 RS485 的 4 针 JST(GH 1.25)排针。
RS485 规格书中的原理图如下所示:
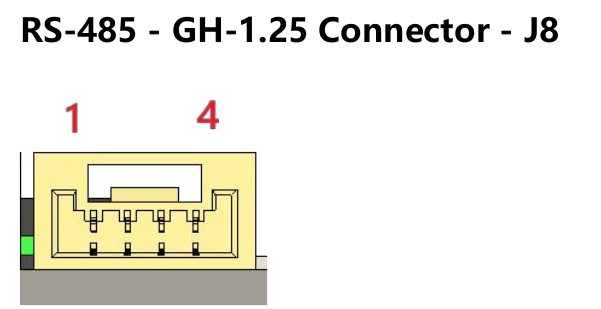
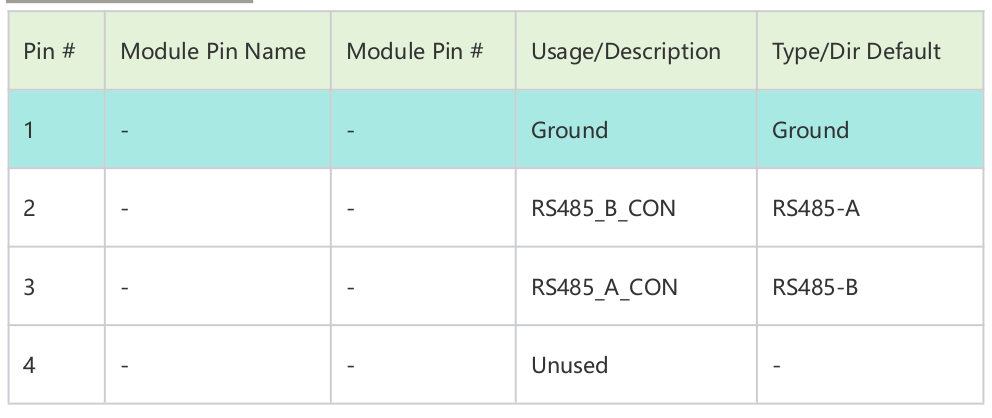
J8 的引脚定义如下:
使用说明
参考以下命令以启用 RS485 接口:
sudo gpioset --mode=wait 1 9=0 # Enable 120R resistance
sudo gpioset --mode=wait 0 126=0 # Enable RS485
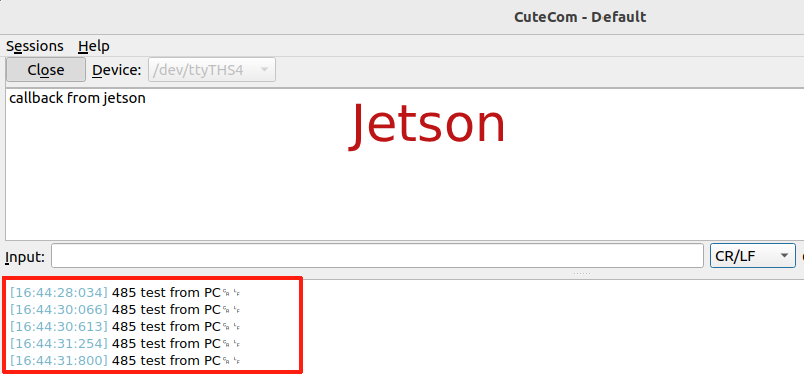
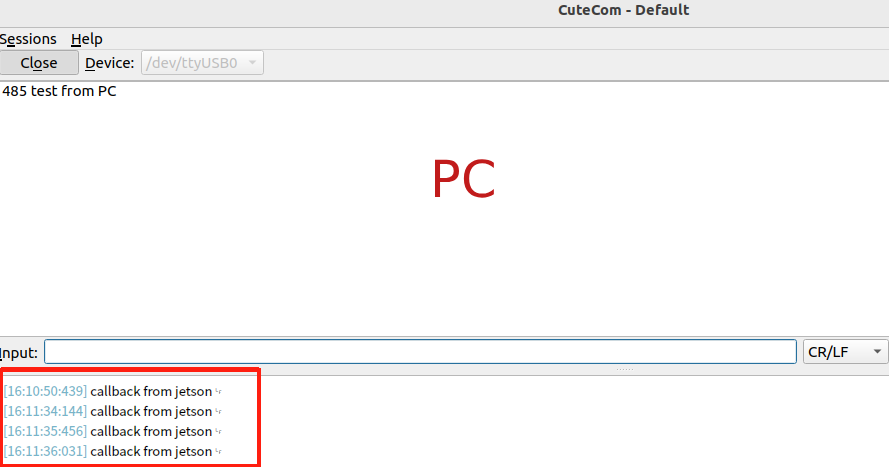
RS485 接口在 Jetson 上映射为 /dev/ttyTHS4。你可以使用 cutecom 与 PC 一起测试串口数据的收发:
sudo apt install cutecom
sudo cutecom
选择 /dev/ttyTHS4,将 Jetson 和 PC 的波特率都设置为 9600,并通过 RS485 转 USB 模块连接 Jetson 与 PC。
串口数据收发效果如下图所示:
I2S
I2S 接口提供了一个数字音频通信总线,用于在设备之间传输立体声音频数据。Robotics J501-Mini 支持标准 I2S 信号,可为语音交互、声源定位和实时音频处理等应用提供高质量、低延迟的音频输入和输出。
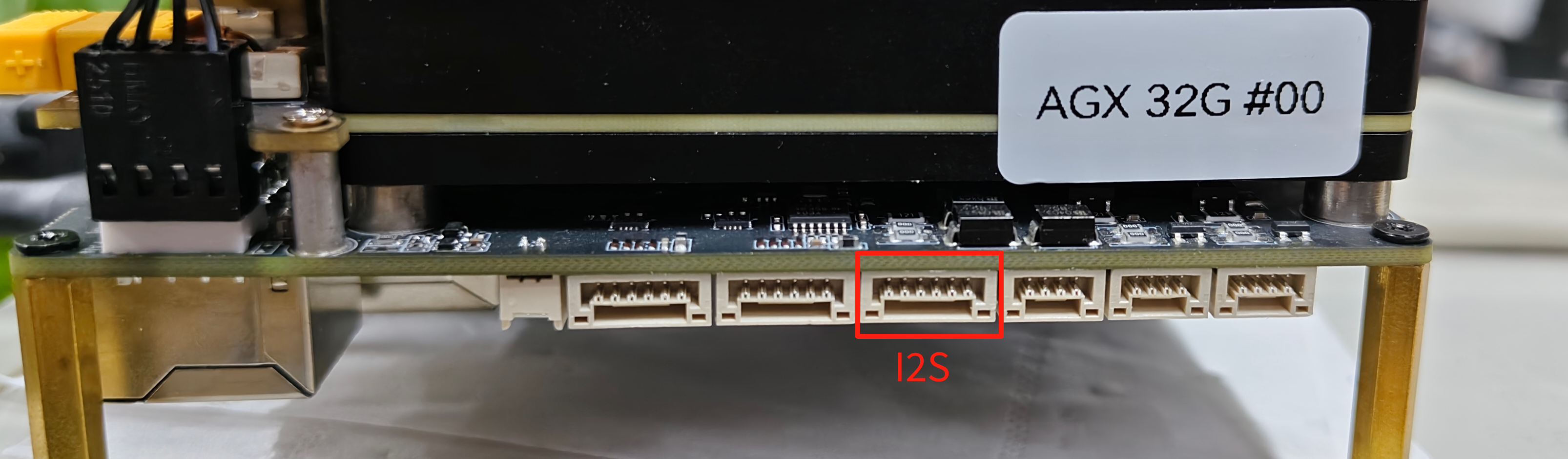
硬件连接
Robotics J501-Mini 为 I2S 提供了 1 个 5 针 JST 连接器(GH 1.25)。
I2S 规格书中的原理图如下所示:
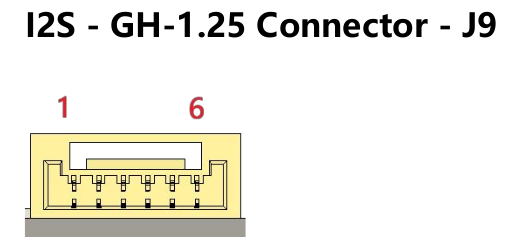
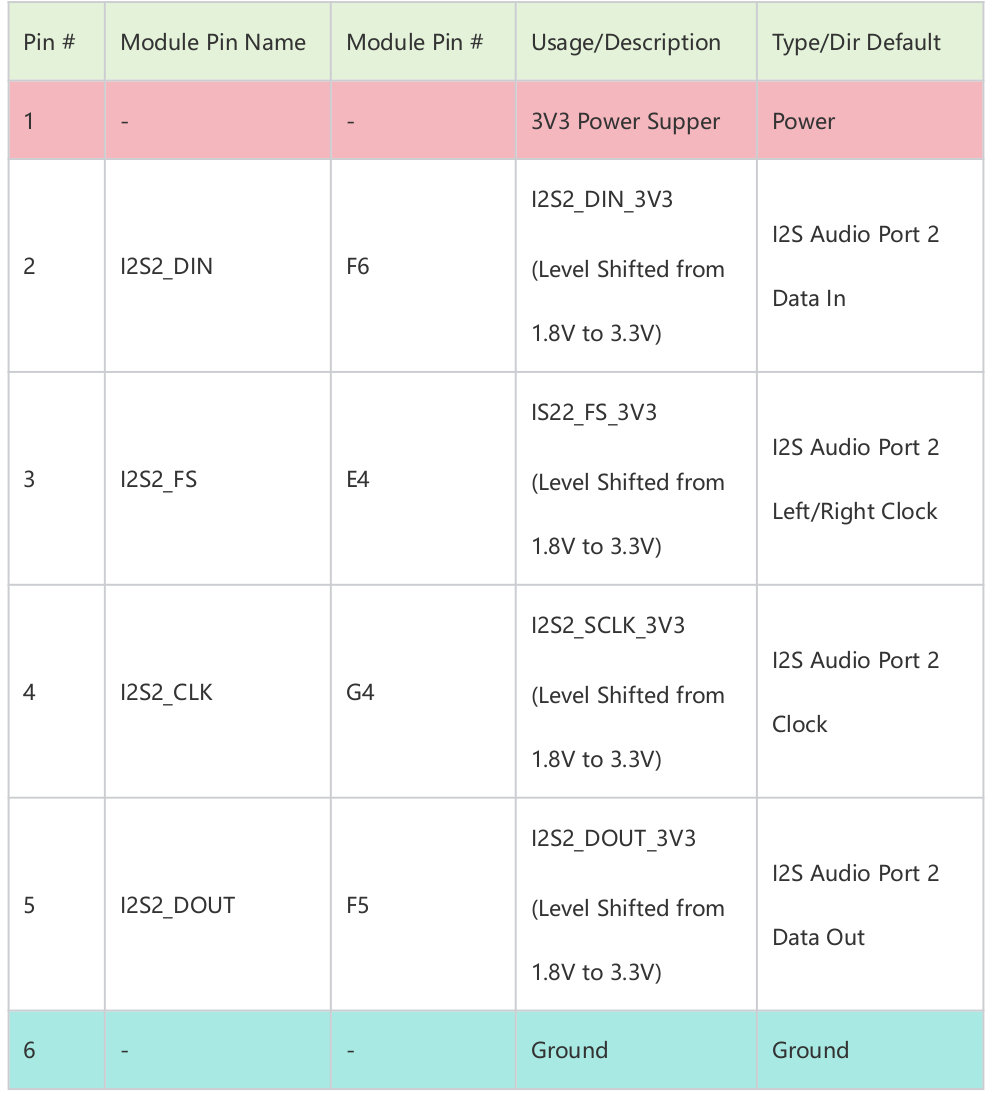
J9 的引脚定义如下:
使用说明
要启用 I2S,需要在 jetson-io.py 中进行配置。在终端中运行以下命令:
sudo python /opt/nvidia/jetson-io/jetson-io.py
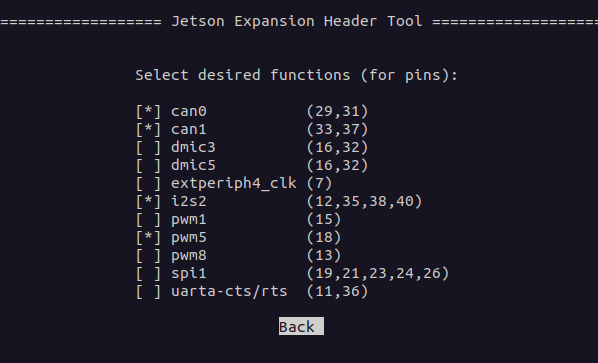
然后参考下面的四个步骤启用 I2S 接口:
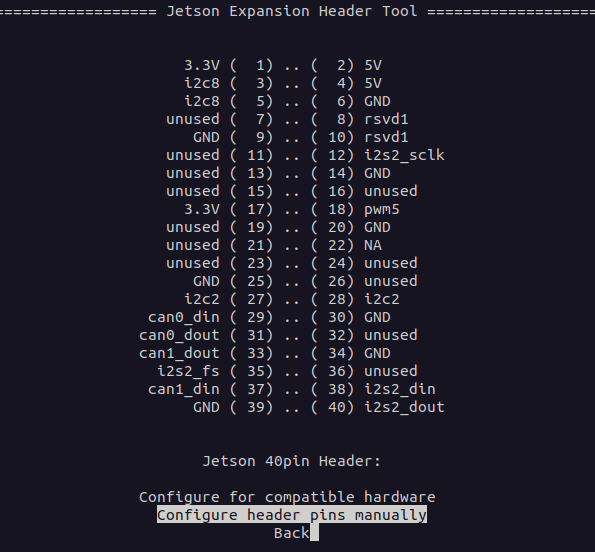
- 步骤 1:选择 Jetson 40-pin header 选项
- 步骤 2:选择 Configure header pins manually
- 步骤 3:选择
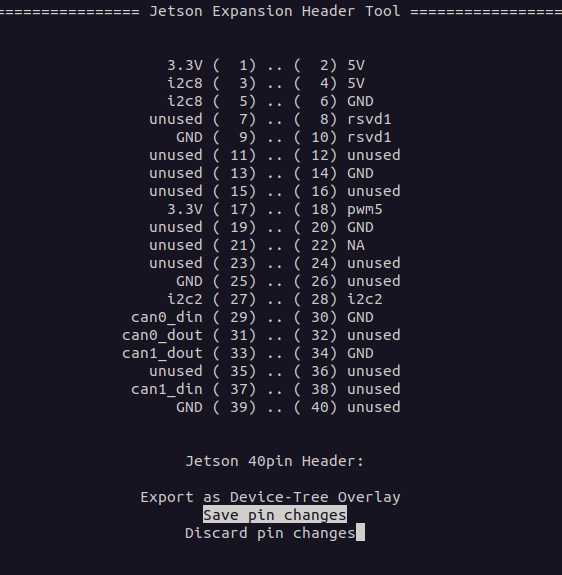
i2s2;选择后会被标记为[*] - 步骤 4:保存设置并重启 Jetson

启用 I2S 后,本节将演示如何使用 I2S 驱动双声道扬声器。首先在终端中输入以下命令:
amixer -c APE cset name="I2S2 Mux" "ADMAIF1" # Speaker
如果你使用的是麦克风:
amixer -c APE cset name="ADMAIF2 Mux" "I2S2" # Microphone
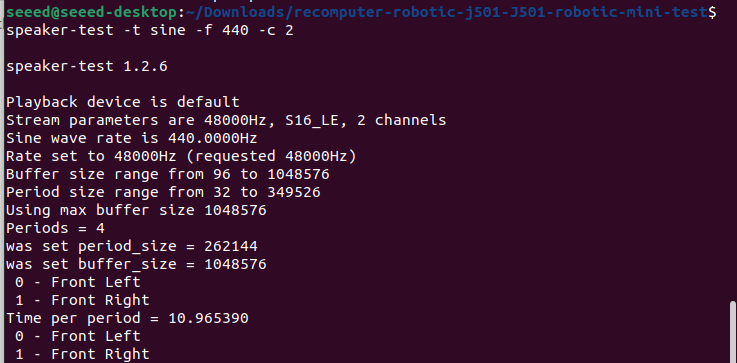
参考下面的命令来驱动扬声器,其中 -c 需要根据你使用的扬声器声道数进行修改:
speaker-test -t sine -f 440 -c 2
当扬声器正常驱动时,你可以在终端中看到输出,如下图所示。
RTC
Robotics J501-Mini 提供了一个标准的 2 针 RTC(3V)排针。
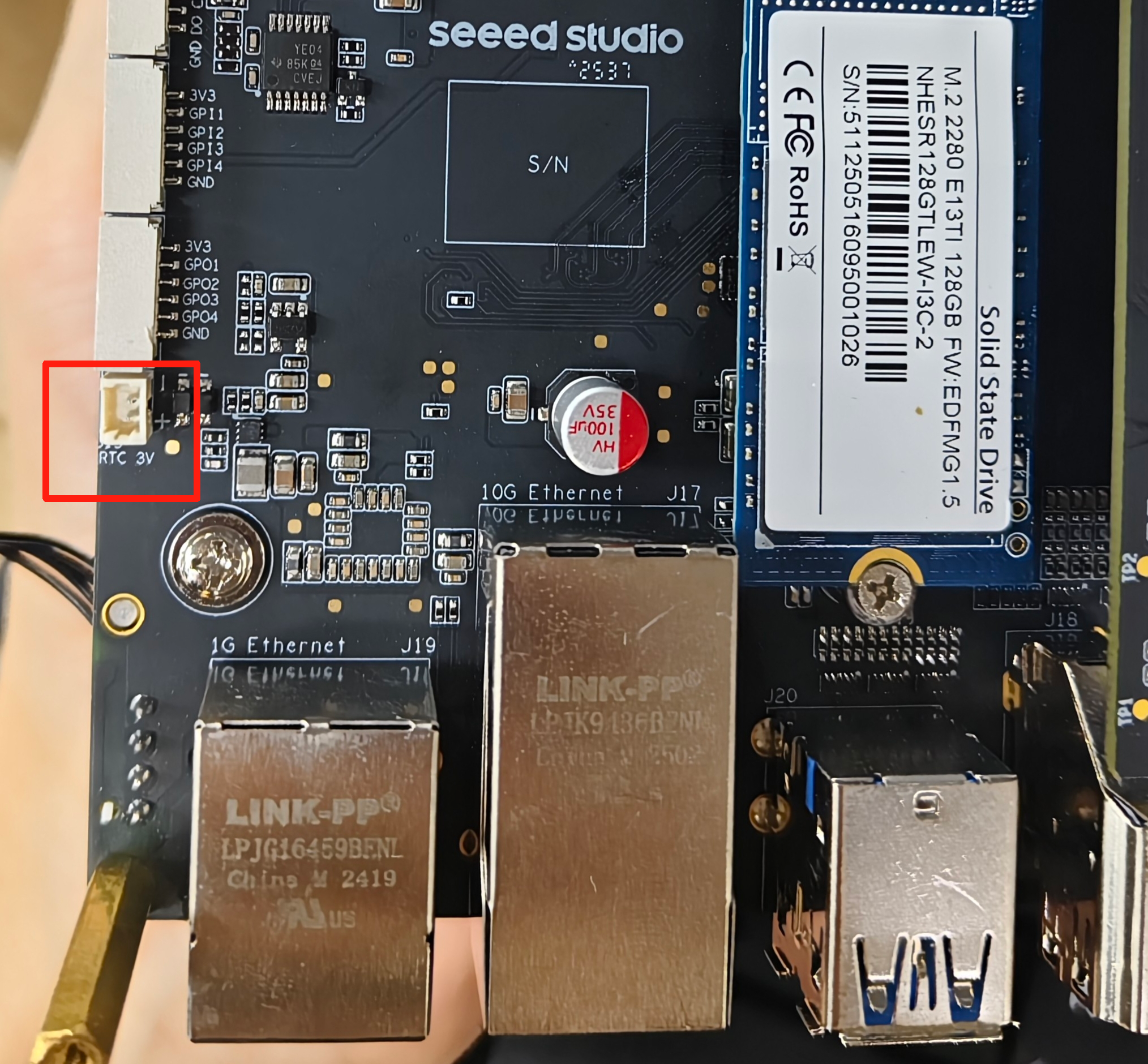
RTC 规格书中的原理图如下所示:
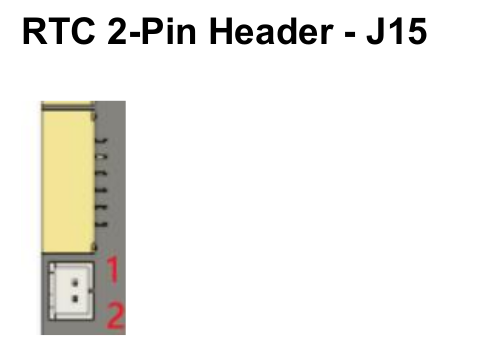
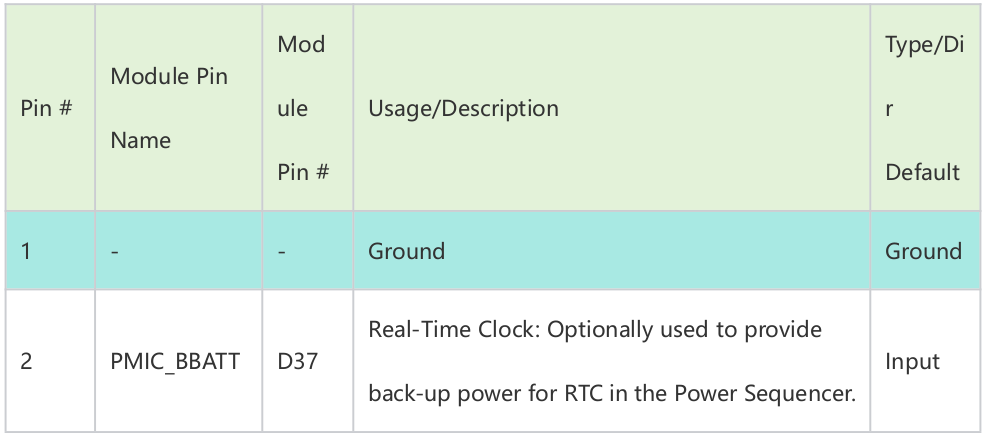
J15 的引脚定义如下:
插入外部电池后,你可以在终端中检查 rtc0(主 RTC,对应板载电池)的工作状态:
cat /sys/class/rtc/rtc0/power/runtime_status
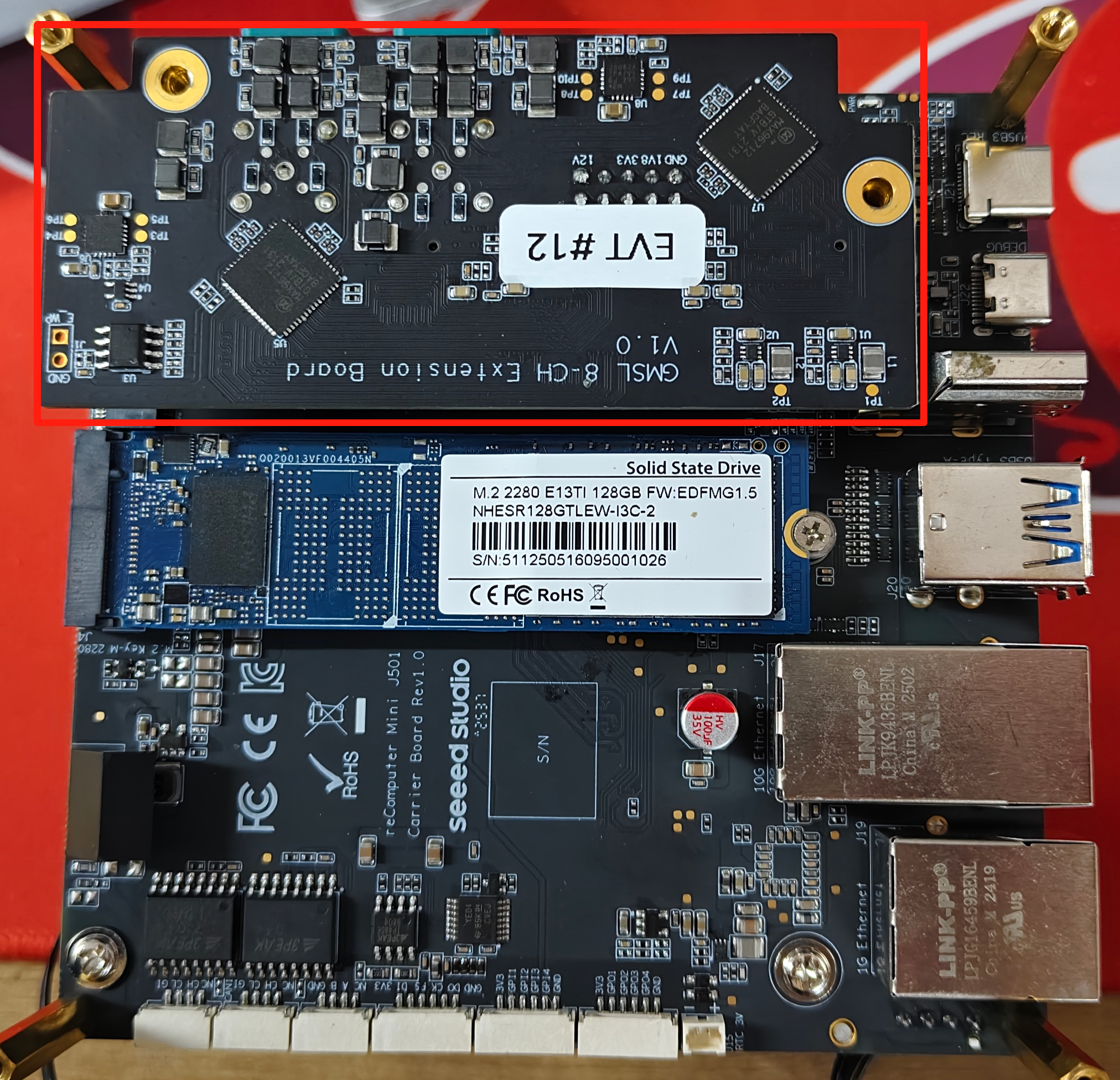
扩展端口 - GMSL
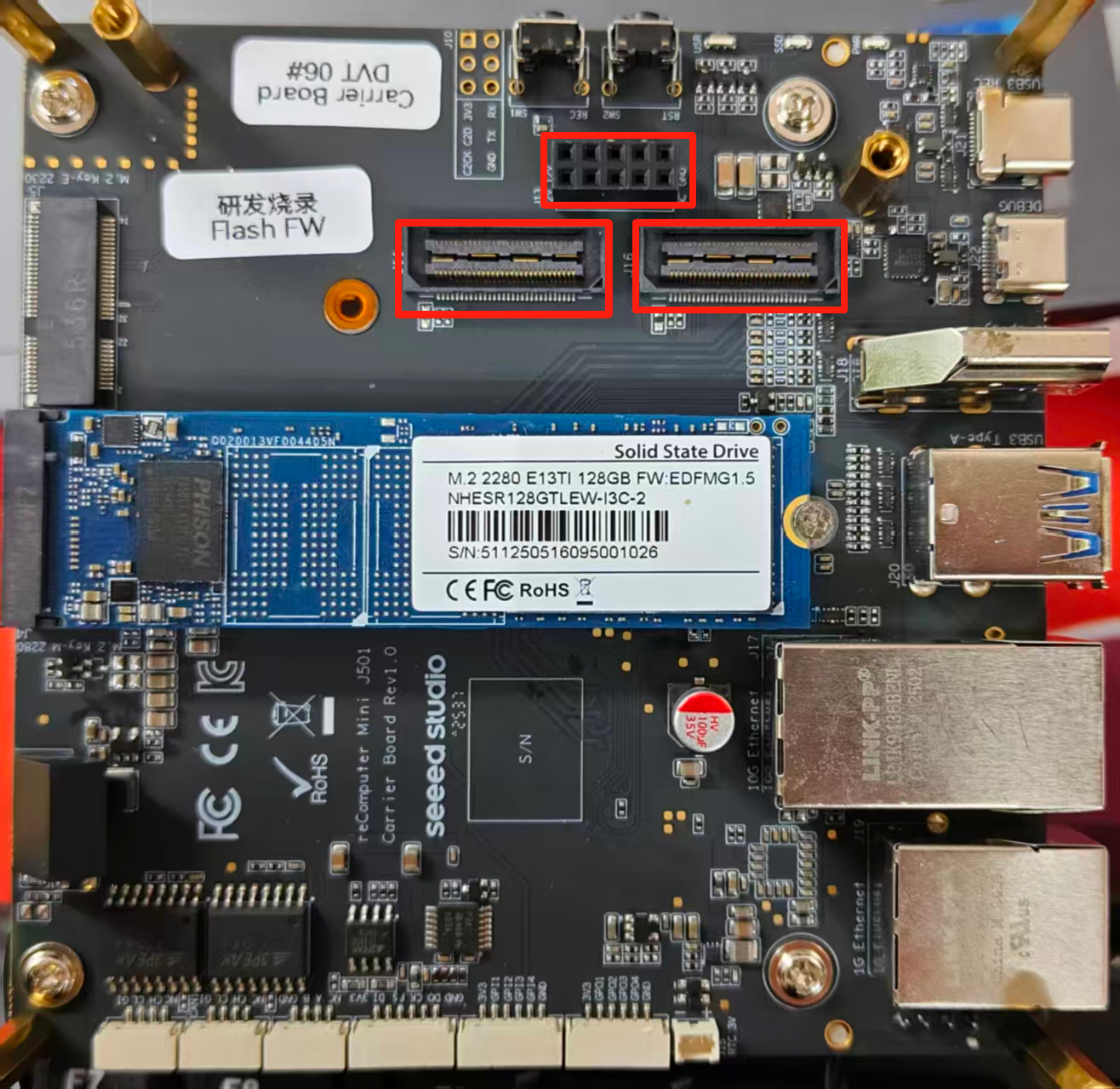
Robotics j501-Mini 载板配备了用于 GMSL 扩展板的摄像头扩展排针。它可以同时连接并运行四路 GMSL 摄像头。
硬件连接
下面是 Robotics j501-Mini 载板上 GMSL 摄像头扩展板的连接插槽(需要提前准备好扩展板):
以下是我们已经支持的 GMSL 摄像头型号:
- SG3S-ISX031C-GMSL2F
- SG2-AR0233C-5200-G2A
- SG2-IMX390C-5200-G2A
- SG8S-AR0820C-5300-G2A
使用说明
在启用 GMSL 功能之前,请确保你已经安装了带有 GMSL 扩展板驱动的 JetPack 版本。
配置 Jetson IO 文件
sudo /opt/nvidia/jetson-io/jetson-io.py
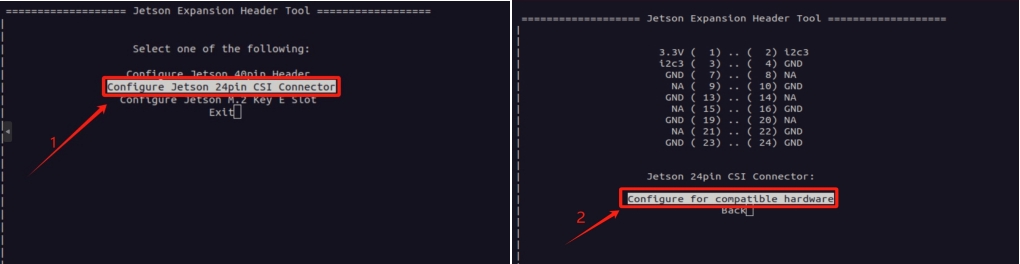
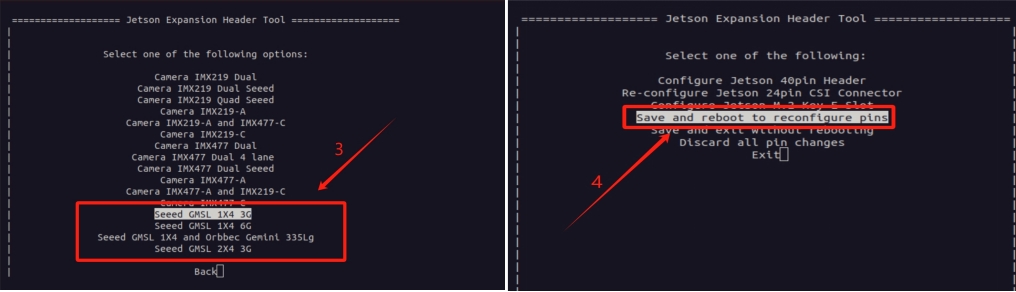
一共有三个 overlay 文件,分别是 Seeed GMSL 1X4 3G、Seeed GMSL 1X4 6G、Seeed GMSL 1X4 和 Orbbec Gemini 335Lg。它们分别对应 SG3S 的 3G 摄像头、SG2 和 SG8S 的 6G 摄像头,以及 Orbbec 的摄像头。如图 3 所示,请根据你摄像头的型号配置 io 文件。
步骤 2. 安装视频接口配置工具。
sudo apt update
sudo apt install v4l-utils
使用 SGxxx 系列的摄像头
步骤 1. 为串行器和解串器设置通道格式。图中的接口编号对应串行器/解串器编号。
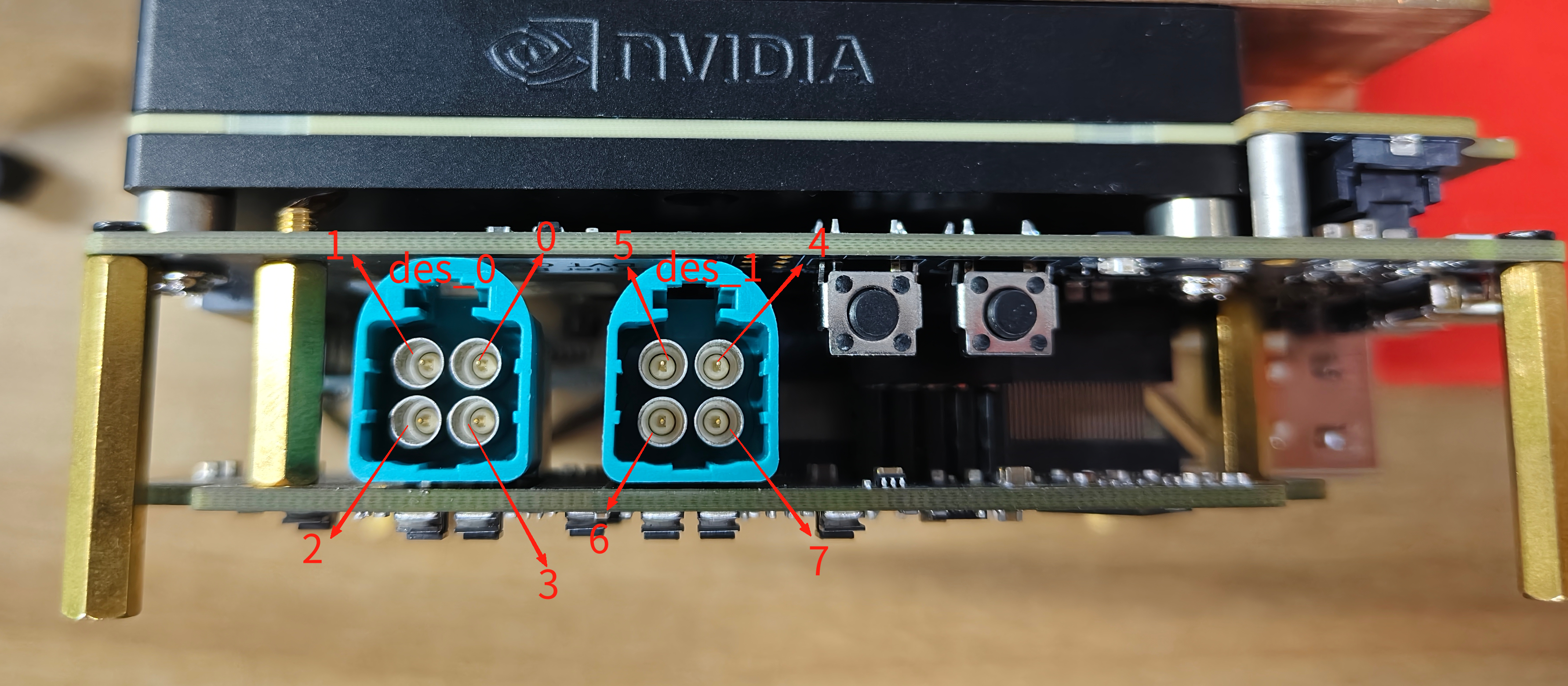
media-ctl -d /dev/media0 --set-v4l2 '"ser_0_ch_0":1[fmt:YUYV8_1X16/1920x1536]'
media-ctl -d /dev/media0 --set-v4l2 '"des_0_ch_0":0[fmt:YUYV8_1X16/1920x1536]'
media-ctl -d /dev/media0 --set-v4l2 '"ser_1_ch_1":1[fmt:YUYV8_1X16/1920x1536]'
media-ctl -d /dev/media0 --set-v4l2 '"des_0_ch_1":0[fmt:YUYV8_1X16/1920x1536]'
media-ctl -d /dev/media0 --set-v4l2 '"ser_2_ch_2":1[fmt:YUYV8_1X16/1920x1536]'
media-ctl -d /dev/media0 --set-v4l2 '"des_0_ch_2":0[fmt:YUYV8_1X16/1920x1536]'
media-ctl -d /dev/media0 --set-v4l2 '"ser_3_ch_3":1[fmt:YUYV8_1X16/1920x1536]'
media-ctl -d /dev/media0 --set-v4l2 '"des_0_ch_3":0[fmt:YUYV8_1X16/1920x1536]'
media-ctl -d /dev/media0 --set-v4l2 '"ser_4_ch_0":1[fmt:YUYV8_1X16/1920x1536]'
media-ctl -d /dev/media0 --set-v4l2 '"des_1_ch_0":0[fmt:YUYV8_1X16/1920x1536]'
media-ctl -d /dev/media0 --set-v4l2 '"ser_5_ch_1":1[fmt:YUYV8_1X16/1920x1536]'
media-ctl -d /dev/media0 --set-v4l2 '"des_1_ch_1":0[fmt:YUYV8_1X16/1920x1536]'
media-ctl -d /dev/media0 --set-v4l2 '"ser_6_ch_2":1[fmt:YUYV8_1X16/1920x1536]'
media-ctl -d /dev/media0 --set-v4l2 '"des_1_ch_2":0[fmt:YUYV8_1X16/1920x1536]'
media-ctl -d /dev/media0 --set-v4l2 '"ser_7_ch_3":1[fmt:YUYV8_1X16/1920x1536]'
media-ctl -d /dev/media0 --set-v4l2 '"des_1_ch_3":0[fmt:YUYV8_1X16/1920x1536]'
ser_0_ch_0 是解码器的第一个通道,des_ch_0 是第一路相机上的串行器,其他通道同理。如果连接的相机分辨率不同,则此处的配置将基于相机的实际格式。
每次设备重启时,我们都需要为串行器和解串器设置通道格式。
步骤 2. 设置相机的分辨率。
这里我们演示如何配置不同型号和分辨率的相机。
v4l2-ctl -V --set-fmt-video=width=1920,height=1080 -c sensor_mode=1 -d /dev/video0
v4l2-ctl -V --set-fmt-video=width=1920,height=1080 -c sensor_mode=1 -d /dev/video1
v4l2-ctl -V --set-fmt-video=width=1920,height=1536 -c sensor_mode=0 -d /dev/video2
v4l2-ctl -V --set-fmt-video=width=3840,height=2160 -c sensor_mode=2 -d /dev/video3
--set-fmt-video 后面跟随的是根据所连接相机选择的分辨率。sensor_mode 也会相应选择。目前有三个 sensor_mode 选项,每个对应一种不同的分辨率。
- sensor_mode=0 -------> YUYV8_1X16/1920x1536
- sensor_mode=1 -------> YUYV8_1X16/1920x1080
- sensor_mode=2 -------> YUYV8_1X16/3840x2160
步骤 3. 启动相机。
gst-launch-1.0 v4l2src device=/dev/video0 ! \
'video/x-raw,width=1920,height=1080,framerate=30/1,format=UYVY' ! \
videoconvert ! autovideosink -ev
gst-launch-1.0 v4l2src device=/dev/video1 ! \
'video/x-raw,width=1920,height=1080,framerate=30/1,format=UYVY' ! \
videoconvert ! autovideosink -ev
gst-launch-1.0 v4l2src device=/dev/video2 ! \
'video/x-raw,width=1920,height=1536,framerate=30/1,format=UYVY' ! \
videoconvert ! autovideosink -ev
gst-launch-1.0 v4l2src device=/dev/video3 ! \
'video/x-raw,width=3840,height=2160,framerate=30/1,format=UYVY' ! \
videoconvert ! autovideosink -ev
显示
Robotics J501 Mini 配备了一个 HDMI 接口,用于高分辨率显示输出。
资源
技术支持与产品讨论
感谢您选择我们的产品!我们将为您提供多种支持,以确保您在使用我们产品的过程中尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。