reComputer Mini 硬件和接口使用

本 wiki 介绍了 reComputer mini J40 系列上的各种不同硬件和接口,以及如何使用它们来扩展您的项目想法。
硬件接口概览
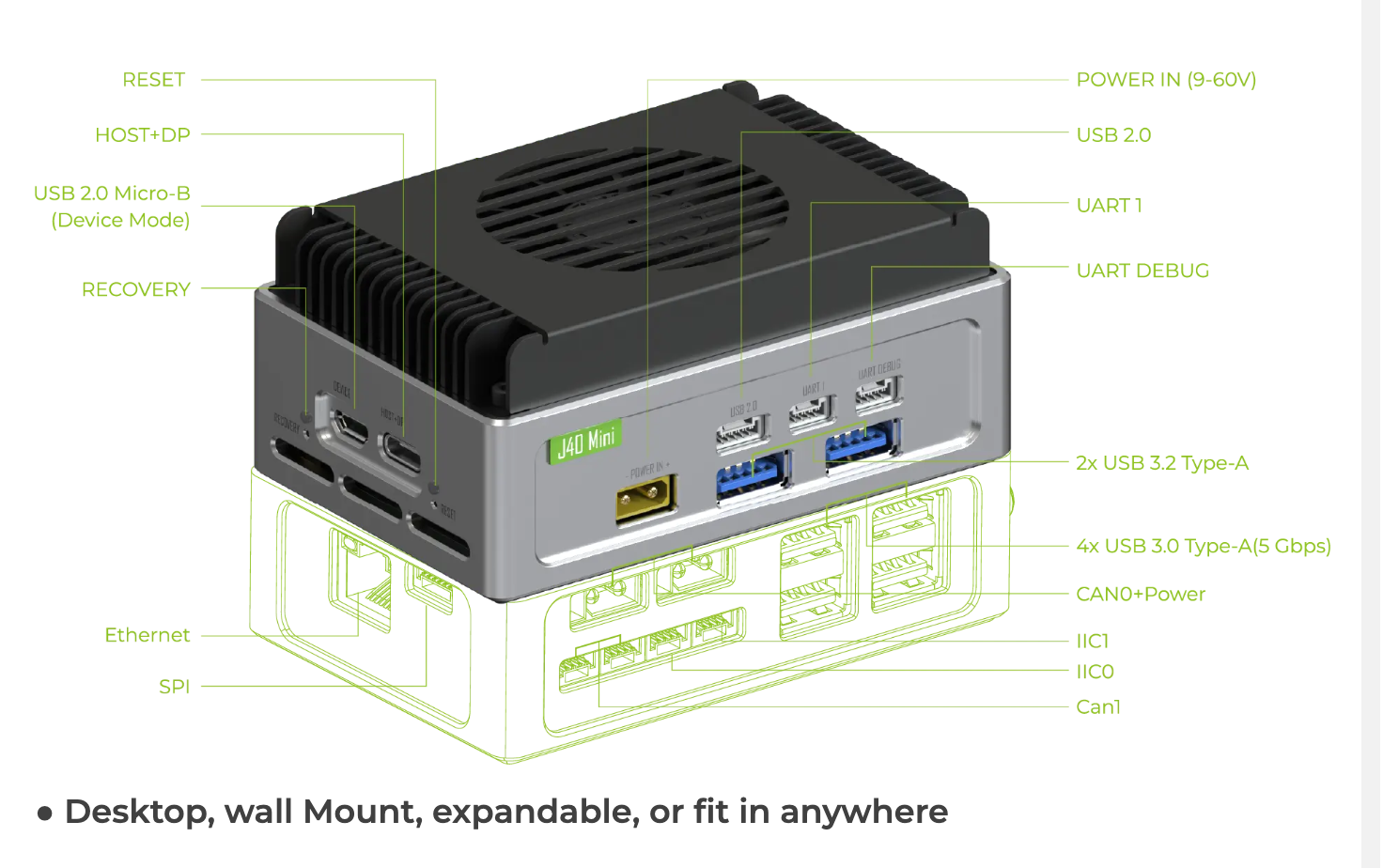
电源
reComputer Mini 配备了 12-54V (XT30) 电源接口,兼容宽电压输入范围(12V 至 54V),使其适用于各种电源供应环境。

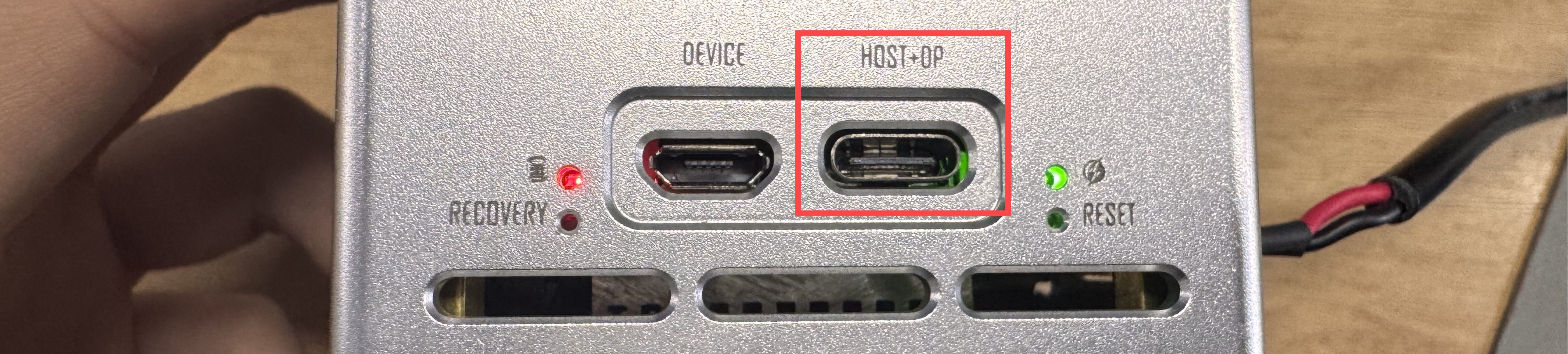
显示器
该产品配备了具有 Host + DP(DisplayPort)功能的 Type-C 端口,这意味着它不仅支持数据传输,还允许您通过此端口连接显示器,实现高质量的视频输出。
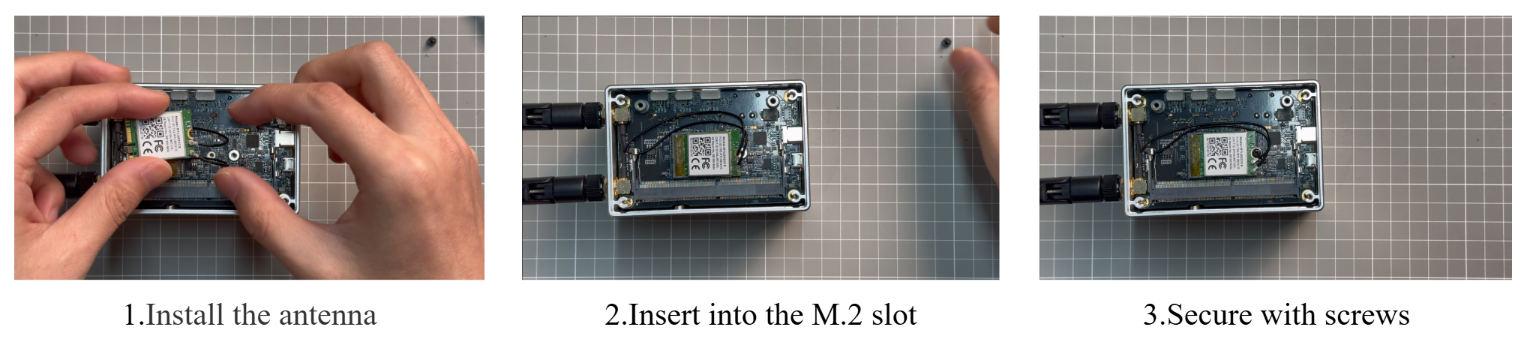
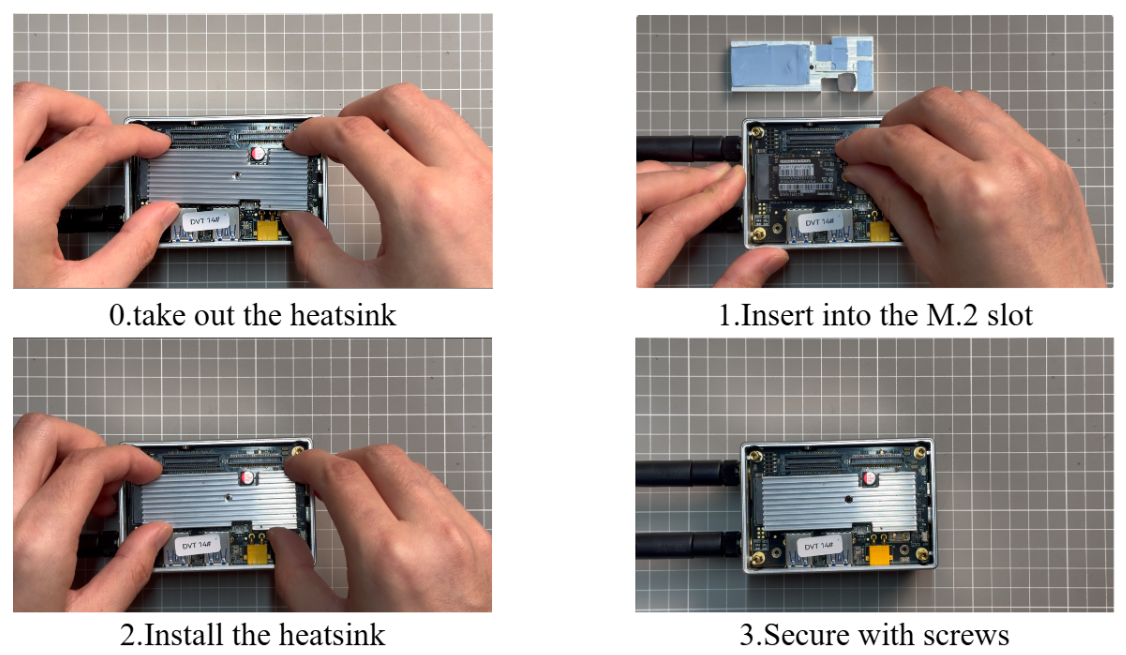
用于 WIFI 和蓝牙的 M.2 Key E
reComputer Mini 具有 M.2 Key E 接口,通过该接口您可以扩展设备的蓝牙和 Wi-Fi 功能。
我们推荐使用 Intel 双频 RTL8822CE 无线网卡。
硬件连接
使用说明
安装 Wi-Fi 模块并为设备通电后,我们可以配置设备的 Wi-Fi 和蓝牙设置。
当然,我们也可以使用以下命令检查设备的运行状态。
ifconfig

bluetoothctl

M.2 Key M 用于 SSD
M.2 Key M 是一个专为高速固态硬盘(SSD)设计的接口,提供超快的数据传输速度,非常适合高性能应用。
开箱即用,reComputer Industrial 包含一个 128GB 工业级 SSD,连接到 M.2 Key M 插槽,支持 x4 PCIe Gen3,预装了 JetPack 系统。
硬件连接
如果您想要移除附带的 SSD 并安装新的 SSD,您需要确保您的 SSD 满足以下两个条件:
- 支持 M.2 Key M 插槽,x4 PCIe Gen3 接口。
- 符合 2242 尺寸规格。
使用说明
在 Jetson 设备中打开终端,输入以下命令来测试 SSD 的读写速度。
sudo dd if=/dev/zero of=tempfile bs=1M count=1024 conv=fdatasync

测试完成后,请运行 sudo rm tempfile 命令删除缓存文件。
以太网
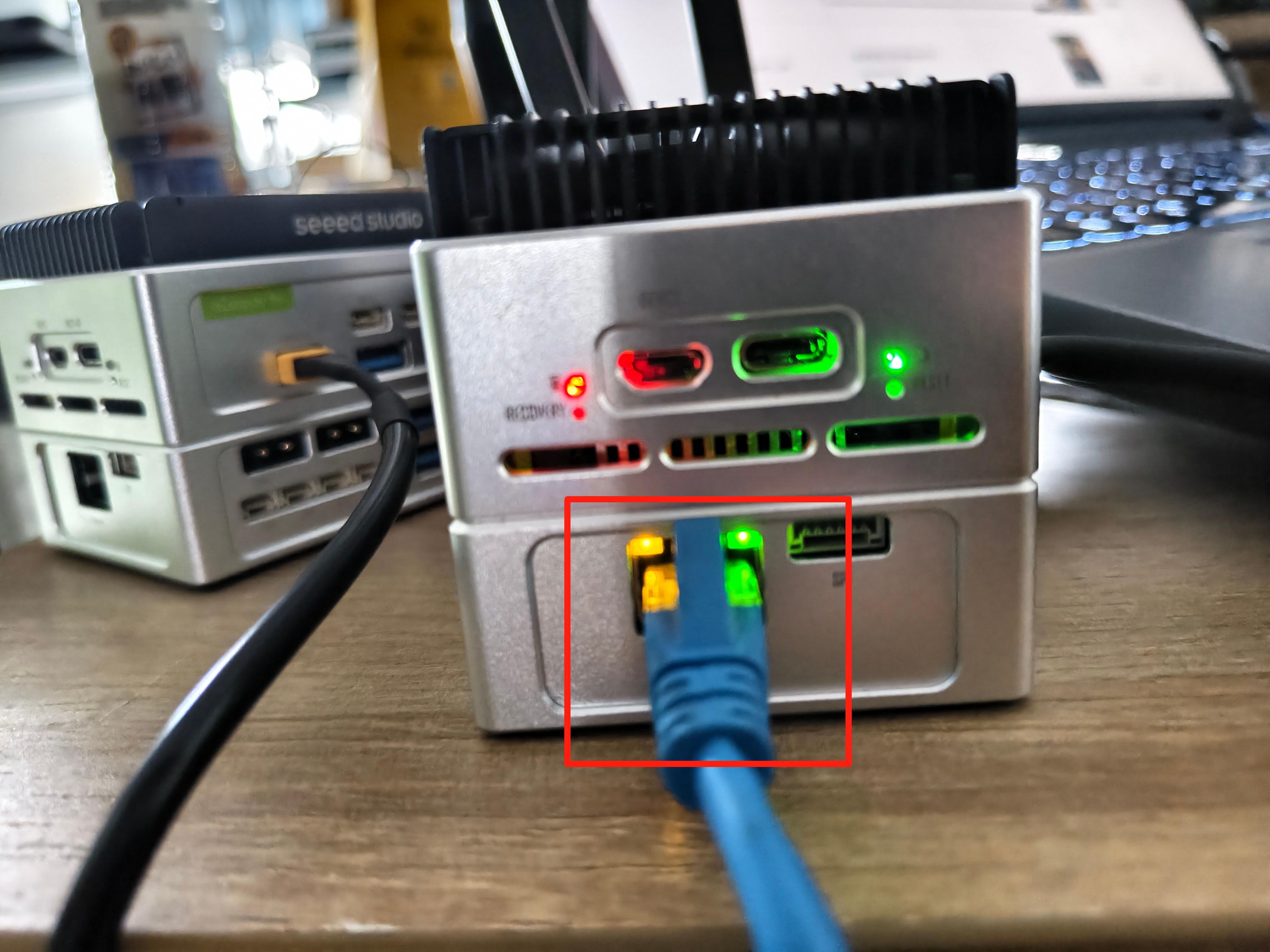
硬件连接
reComputer Mini 在扩展板上配备了一个 RJ45 千兆以太网端口(10/100/1000M)。
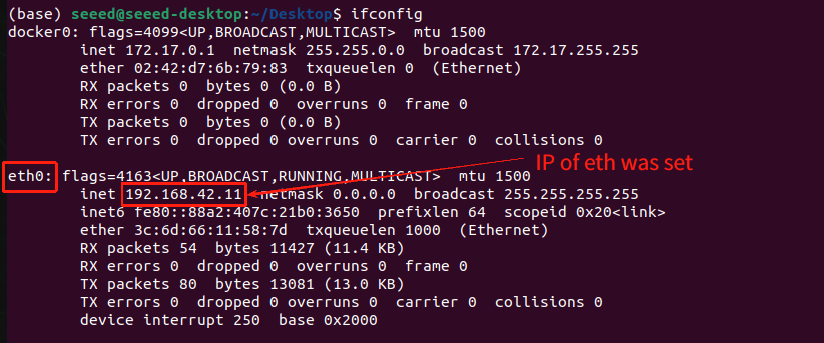
使用说明
在终端中输入 ifconfig,您可以看到以太网接口映射的设备名称是 eth0:
使用千兆以太网 RJ45 线缆将 reComputer Mini 连接到 PC。通过 iperf 工具,我们可以简单测试以太网接口的传输速率。
打开终端,在 PC 和 reComputer Mini 上都安装 iperf3。
sudo apt update
sudo apt install iperf3
在PC上打开终端并输入 iperf3 -s。

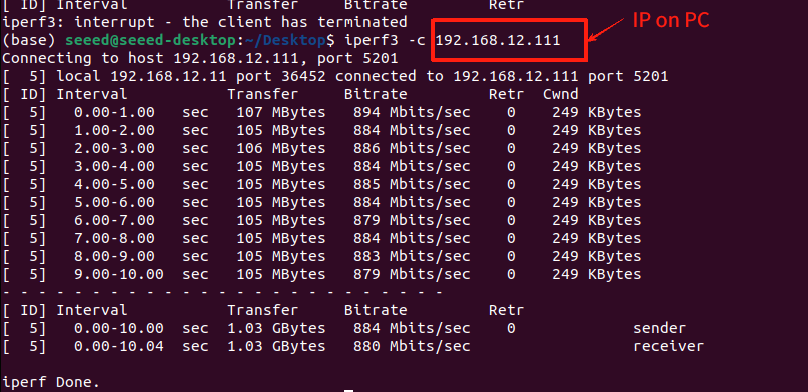
然后,在 reComputer Mini 上打开终端并输入 iperf3 -c <你的PC的IP地址>。
在这种情况下,我的PC网络接口的IP地址是 192.168.12.211。示例命令如下:
iperf3 -c 192.168.12.211
然后,根据下图所示的结果,您可以看到 reComputer Mini 的以太网传输速度可以达到千兆级别。
USB
硬件连接
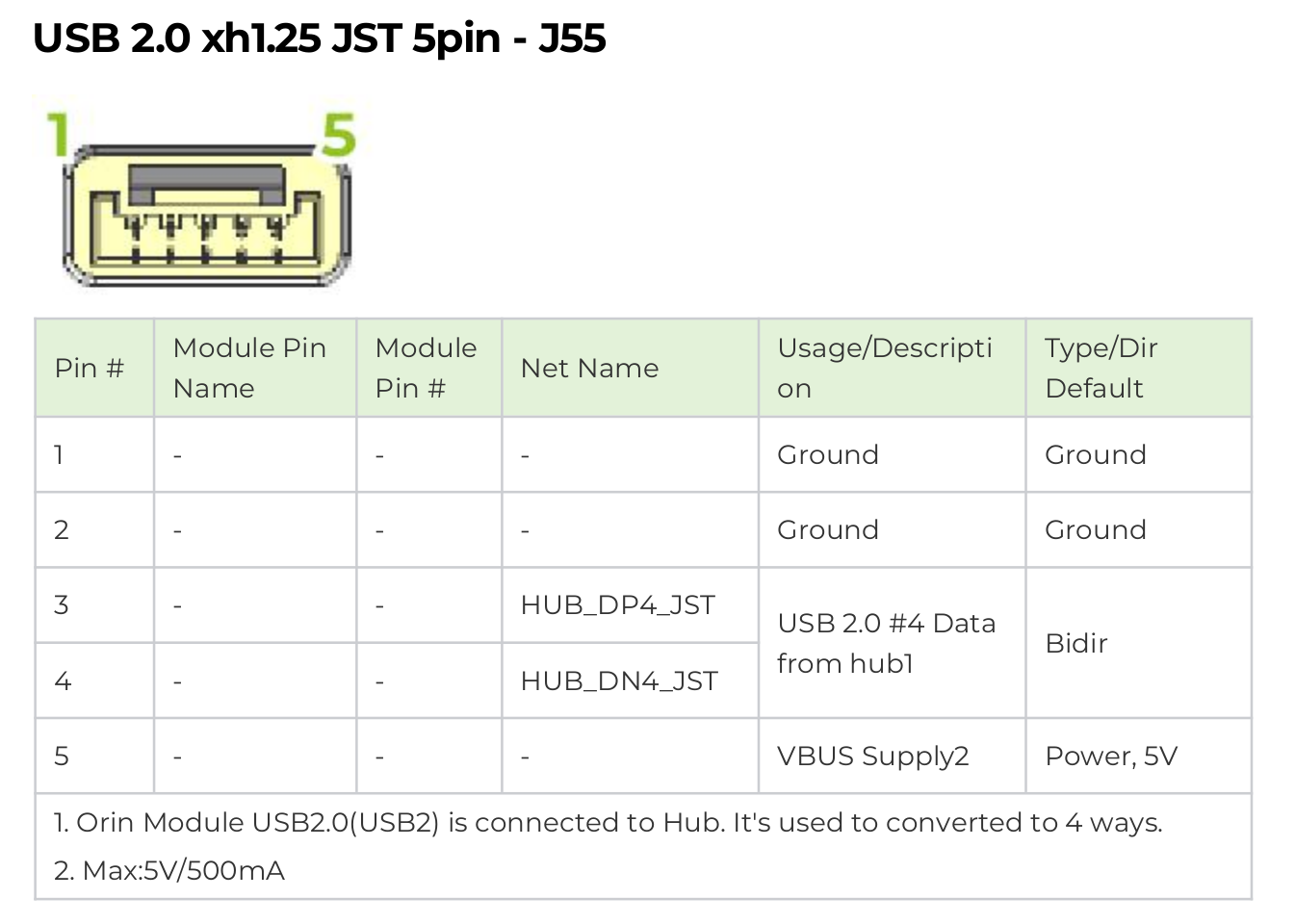
reComputer Mini 载板总共有 4 个 USB 端口:2 个 USB 3.2 Type-A 端口,1 个用于刷机的 USB 2.0 Micro-B 端口,以及 1 个 USB 2.0 GH1.25 端口。扩展板有 4 个 USB 3.0 Type-A 端口。

在数据手册中,您可以找到 USB 2.0 5 针 GH-1.25 接口的接线图,如下所示:
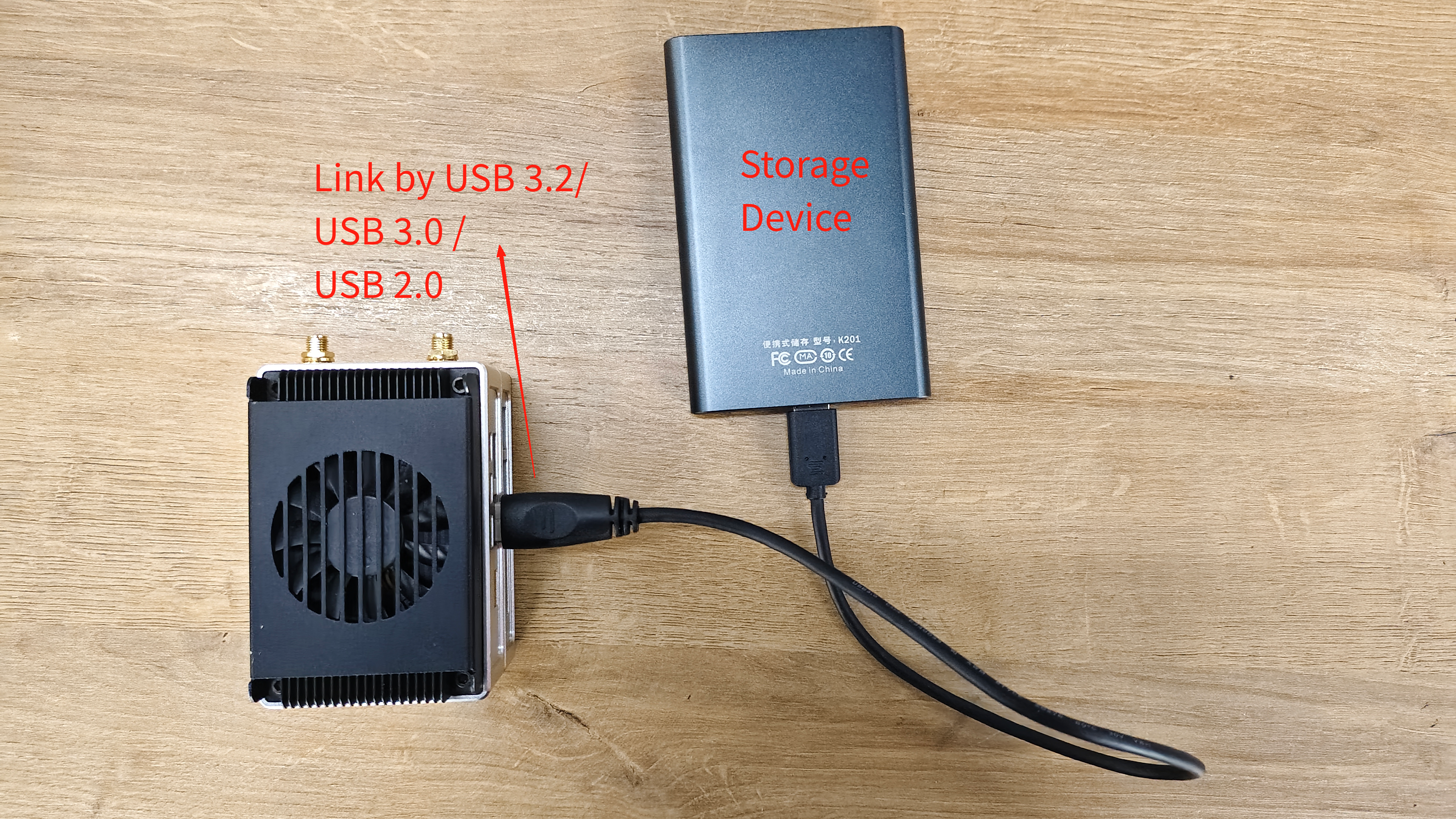
我们可以参考以下步骤,通过 USB 3.2/USB 2.0/USB 3.0 将存储设备连接到 reComputer mini,以测试 USB 读写速度。使用说明将显示后续步骤。
使用说明
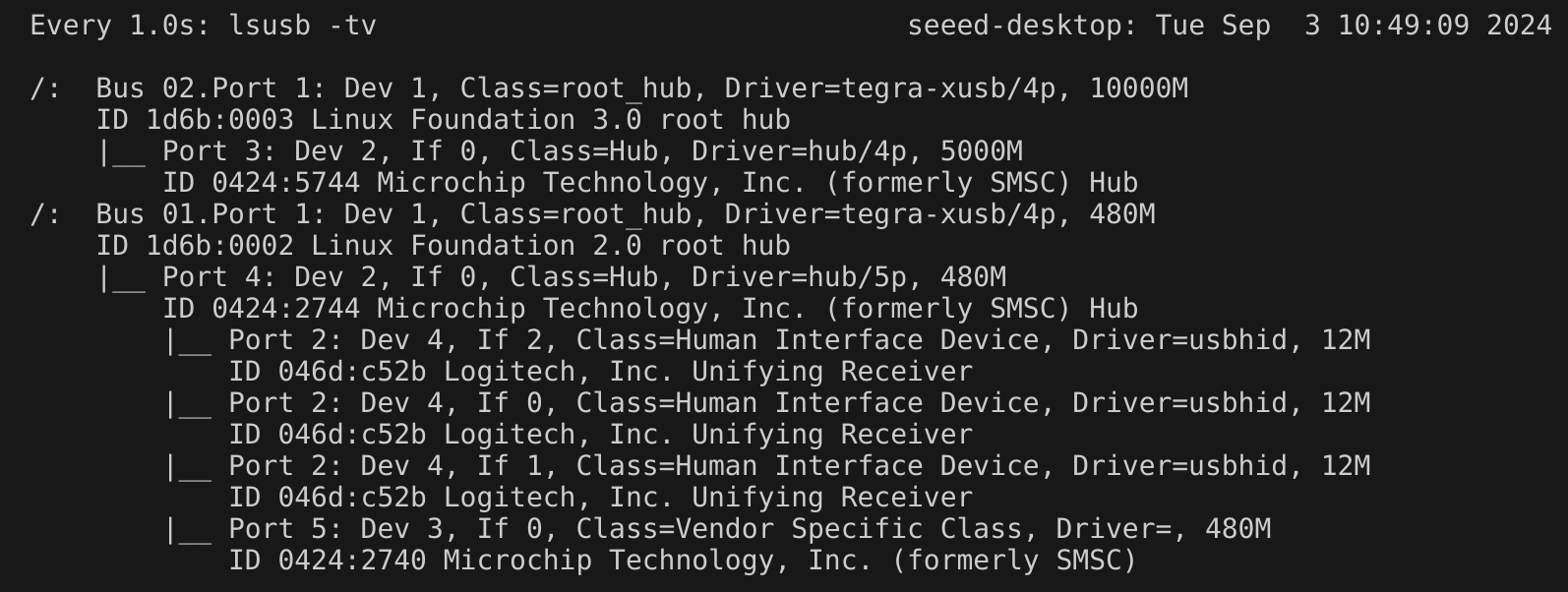
我们可以在 Jetson 终端中输入 watch -n 1 lsusb -tv 来探测 USB 端口。一旦连接了 USB 设备,该端口的详细信息将在此处显示。
通过 USB 3.2/USB 2.0/USB 3.0 连接存储设备后,在终端中输入以下命令查看存储设备映射的分区:
ls /dev/sd*

/dev/sda1 是通过 USB 连接的存储设备映射的分区。如果插入多个设备,它们可能具有不同的映射分区名称。例如:/dev/sdb1。
从 GitHub 拉取并运行测试程序来测量 USB 的写入和读取速度。该程序将写入然后读取 1GB 的临时数据,测试完成后将删除这些数据。
sudo ./USBIO 后面的参数取决于通过 USB 连接的存储设备的映射分区。
git clone https://github.com/jjjadand/Mini_USBIO_test.git
cd Mini_USBIO_test/
gcc -o USBIO USB_test.c
sudo ./USBIO /dev/sda1
通过USB 3.2连接的外部SSD进行1GB数据传输的读写速度如下:

该程序也适用于测试其他USB接口。
关于USB Micro-B接口的使用,请参考此wiki获取详细教程。
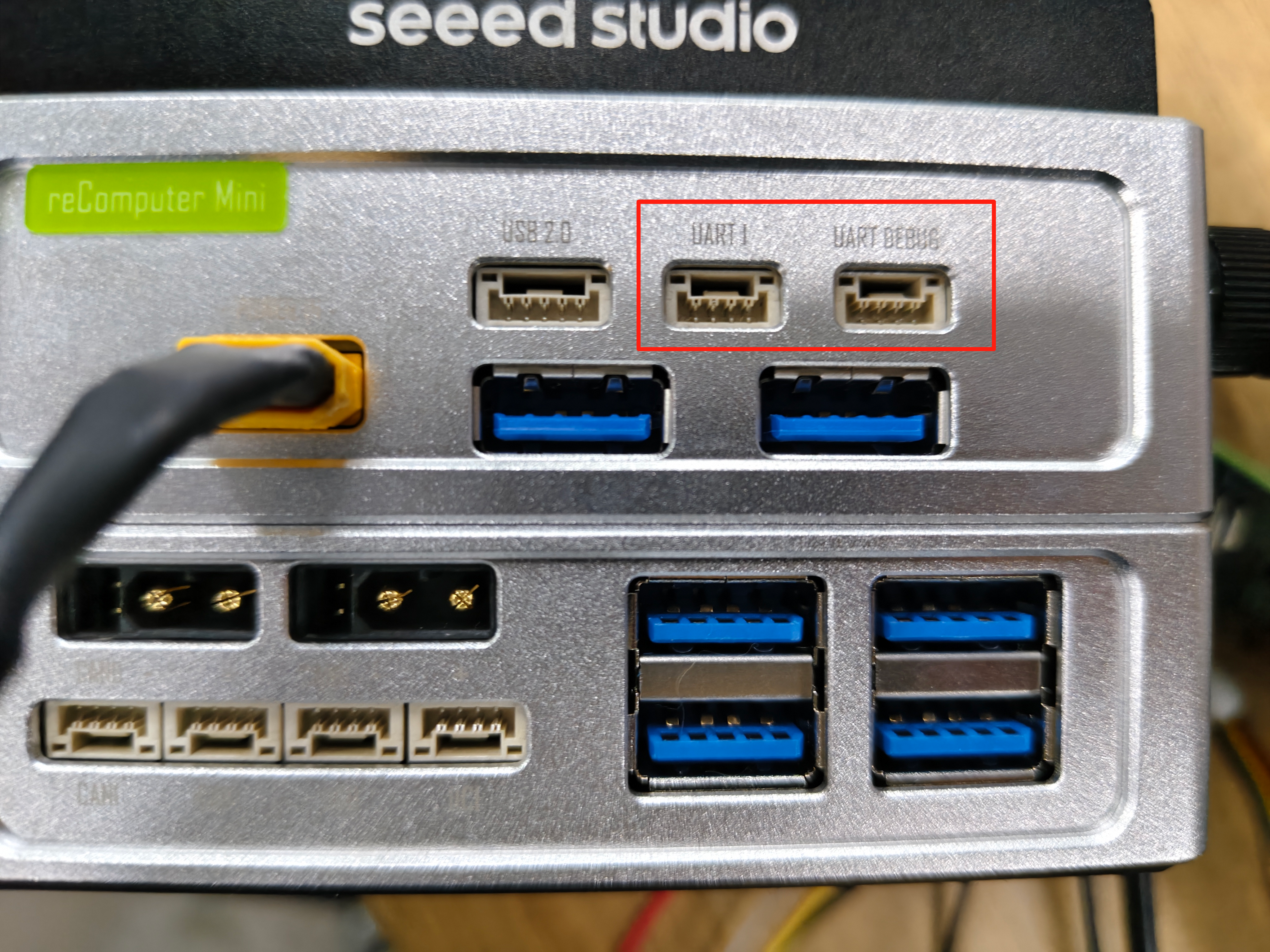
UART
reComputer Mini载板有两个4针GH-1.25 UART接口:UART1和UART-DEBUG。
UART1
硬件连接
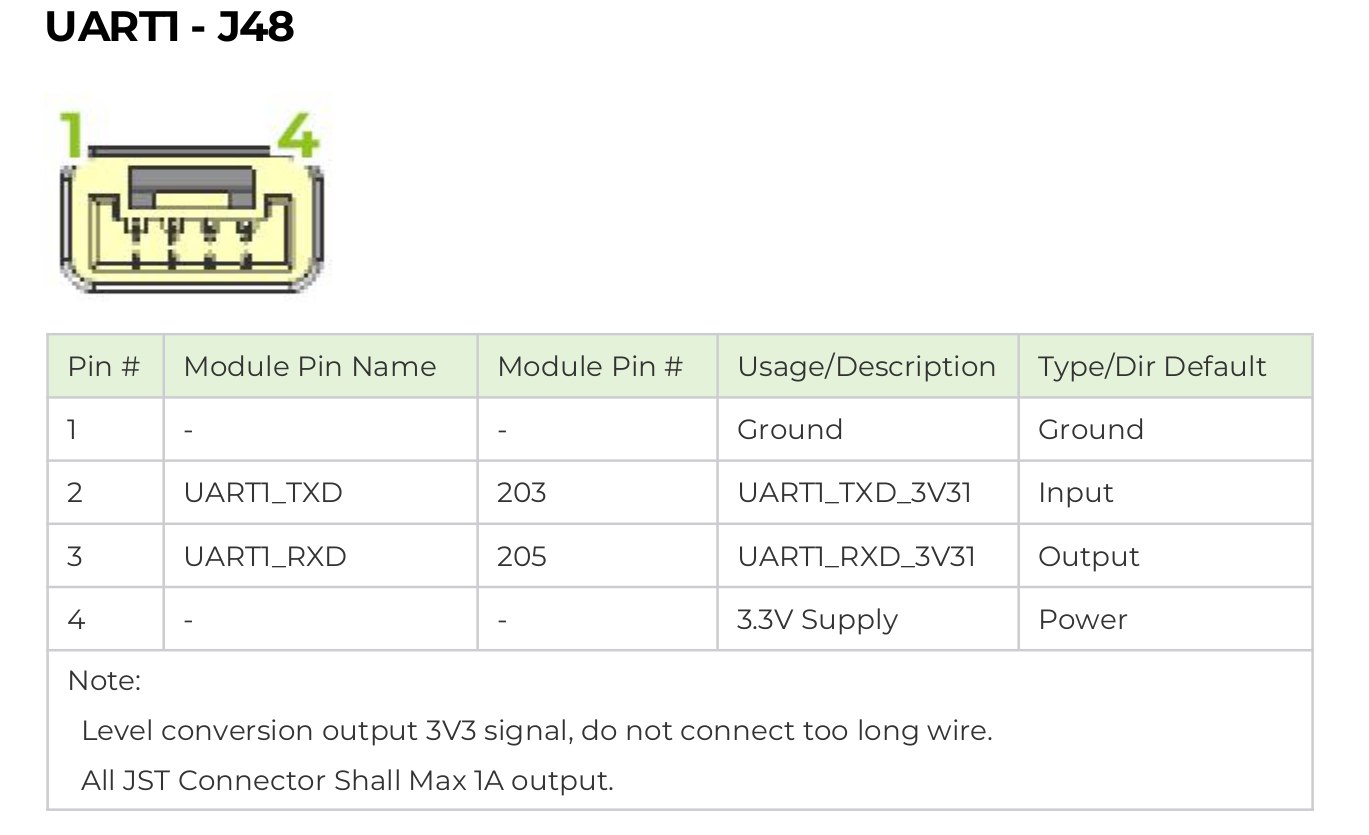
在数据手册中,您可以找到UART1 4针GH-1.25接口的接线图,如下所示:
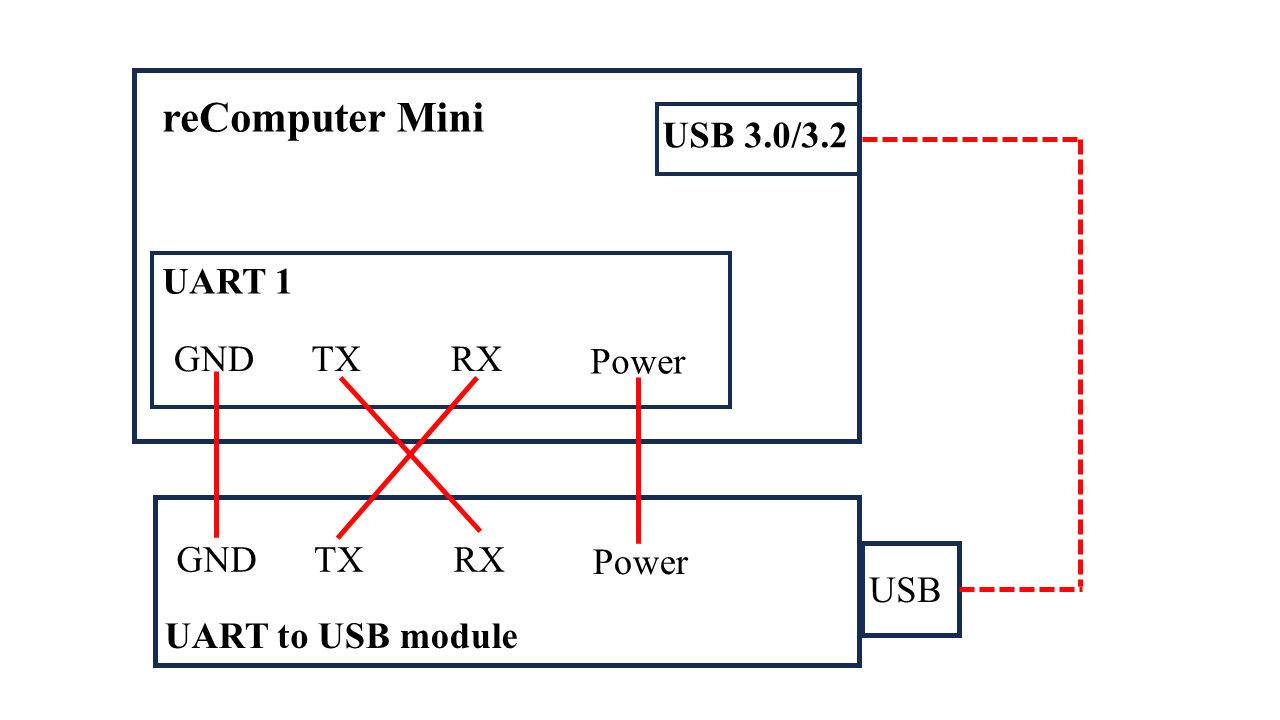
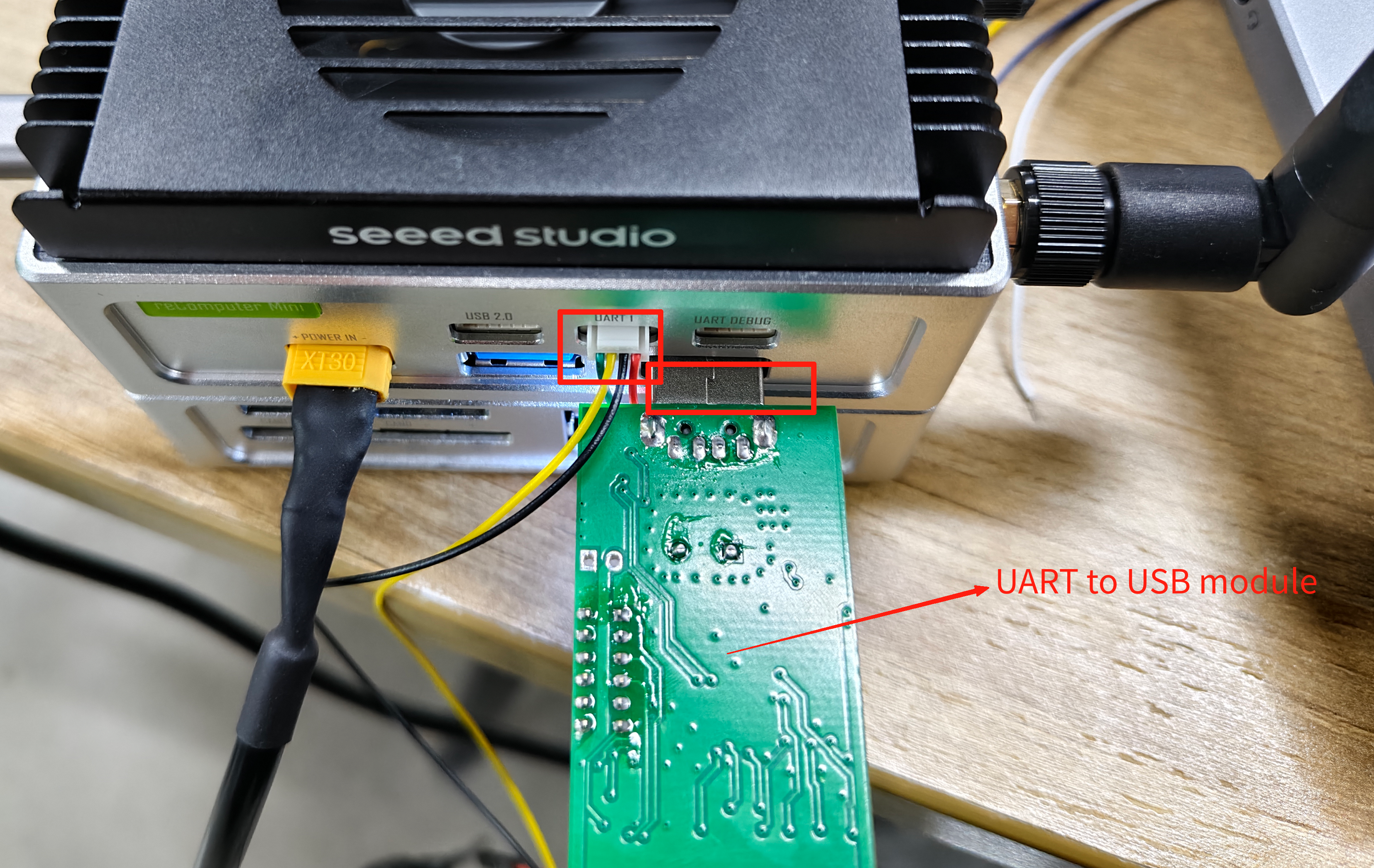
要测试和监控UART1的发送和接收功能,请选择合适的UART转USB模块(根据您的需求),按照数据手册中的接线图进行连接,然后安装cutecom。
将一端连接到UART1的4针GH-1.25接口,另一端插入USB端口,确保Tx连接到Rx,Rx连接到Tx。 使用说明将显示后续步骤。
使用说明
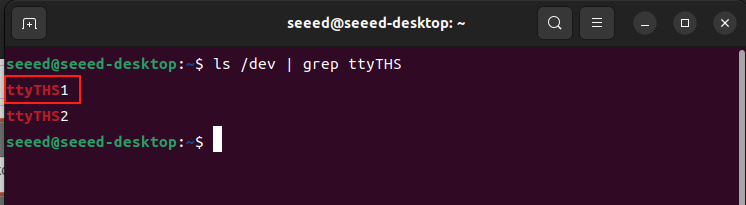
系统识别的UART1串口号为:/dev/ttyTHS1。您可以通过在终端中输入以下命令来检查:
安装Cutecom来测试UART1数据传输和接收:
sudo apt update
sudo apt install cutecom
在两个不同的终端中打开 Cutecom。
sudo cutecom
根据下图设置参数:在一个终端中,为"device"选项选择 /dev/ttyTHS1。在另一个终端中,"device"应该根据您使用的UART转USB模块来选择。您可以在"Input"字段中输入消息来测试数据的传输和接收。


UART-DEBUG
硬件连接
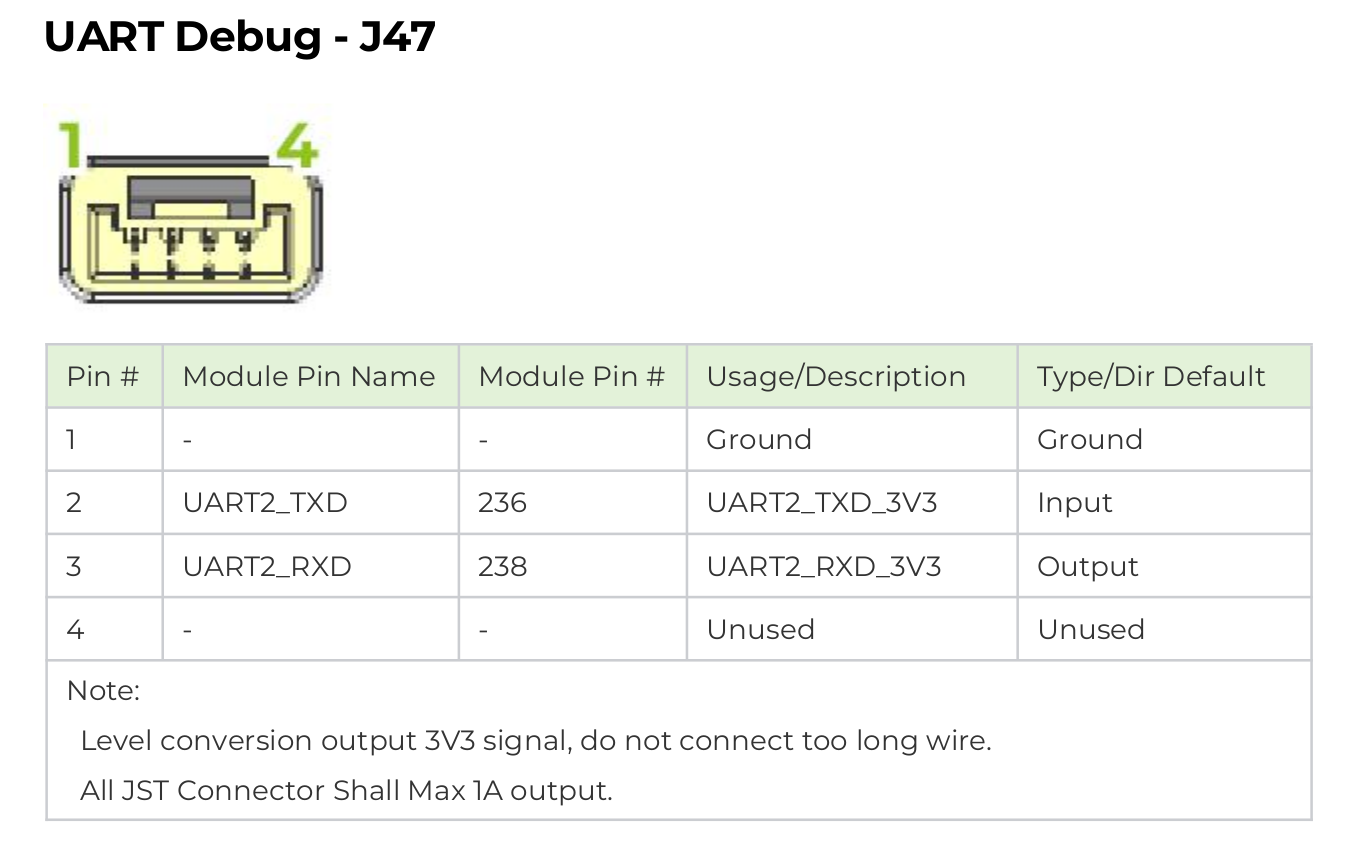
在数据手册中,您可以找到UART-DEBUG 4针GH-1.25接口的接线图,如下所示:
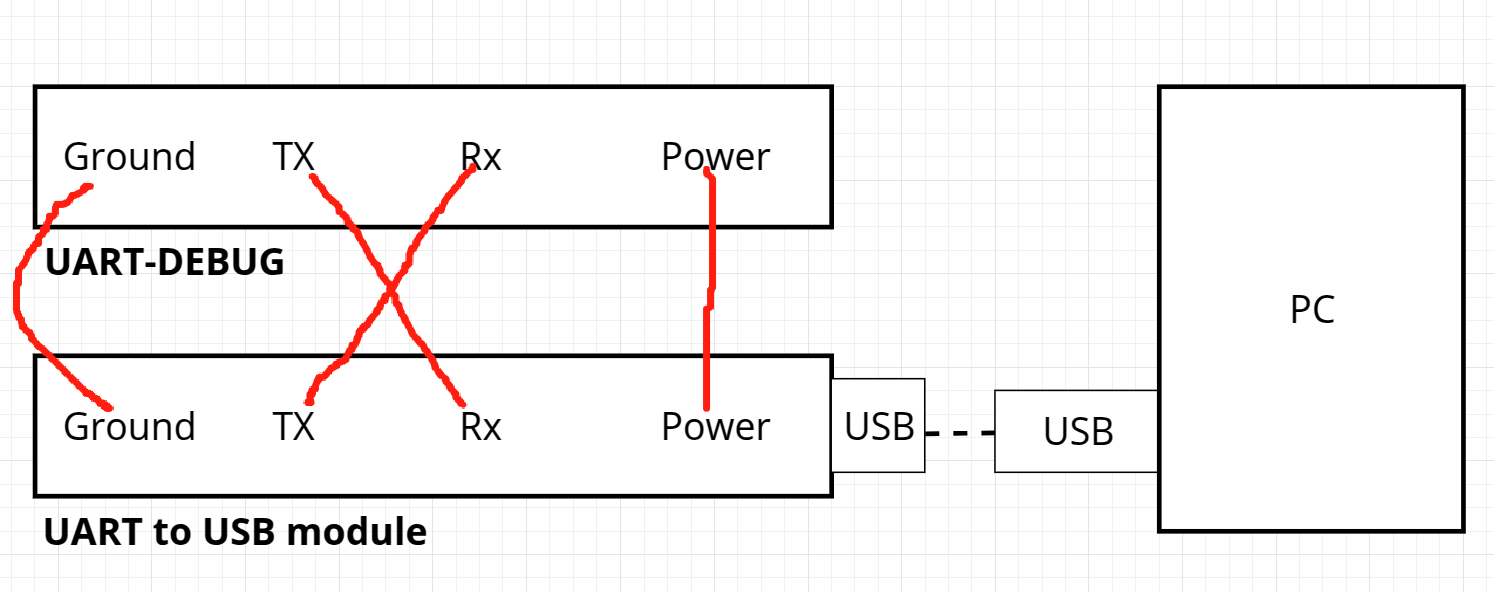
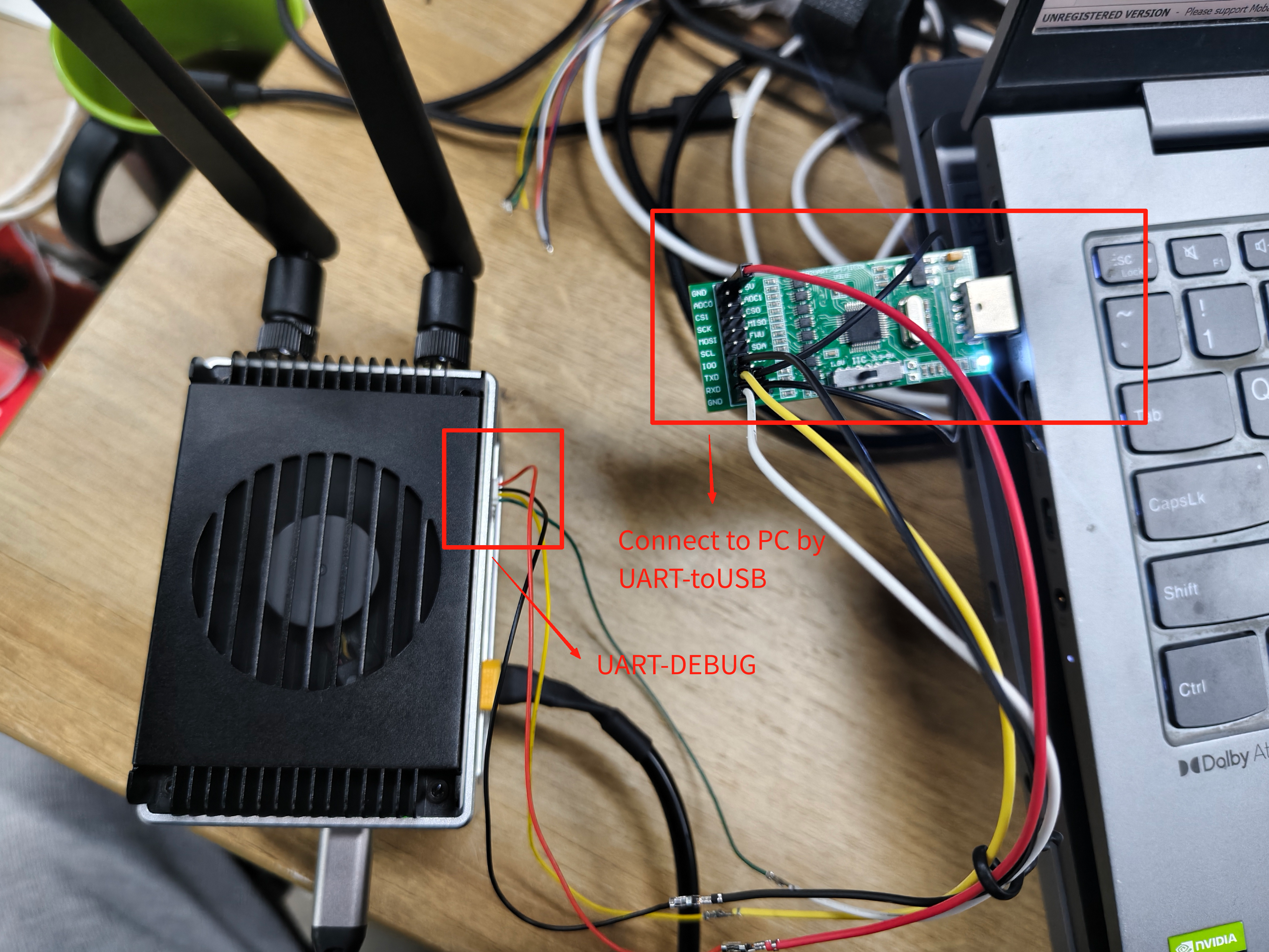
要测试UART-DEBUG,您还需要一个UART转USB模块,该模块应连接到您的PC,如下图所示。
使用说明
完成硬件连接后。
首先在您的PC上安装串口登录工具MobaXterm。 然后在您的PC上打开**"设备管理器"来检查UART转USB模块映射的COM端口。 要测试UART-DEBUG**,您还需要一个UART转USB模块,该模块应连接到您的PC,如下图所示。
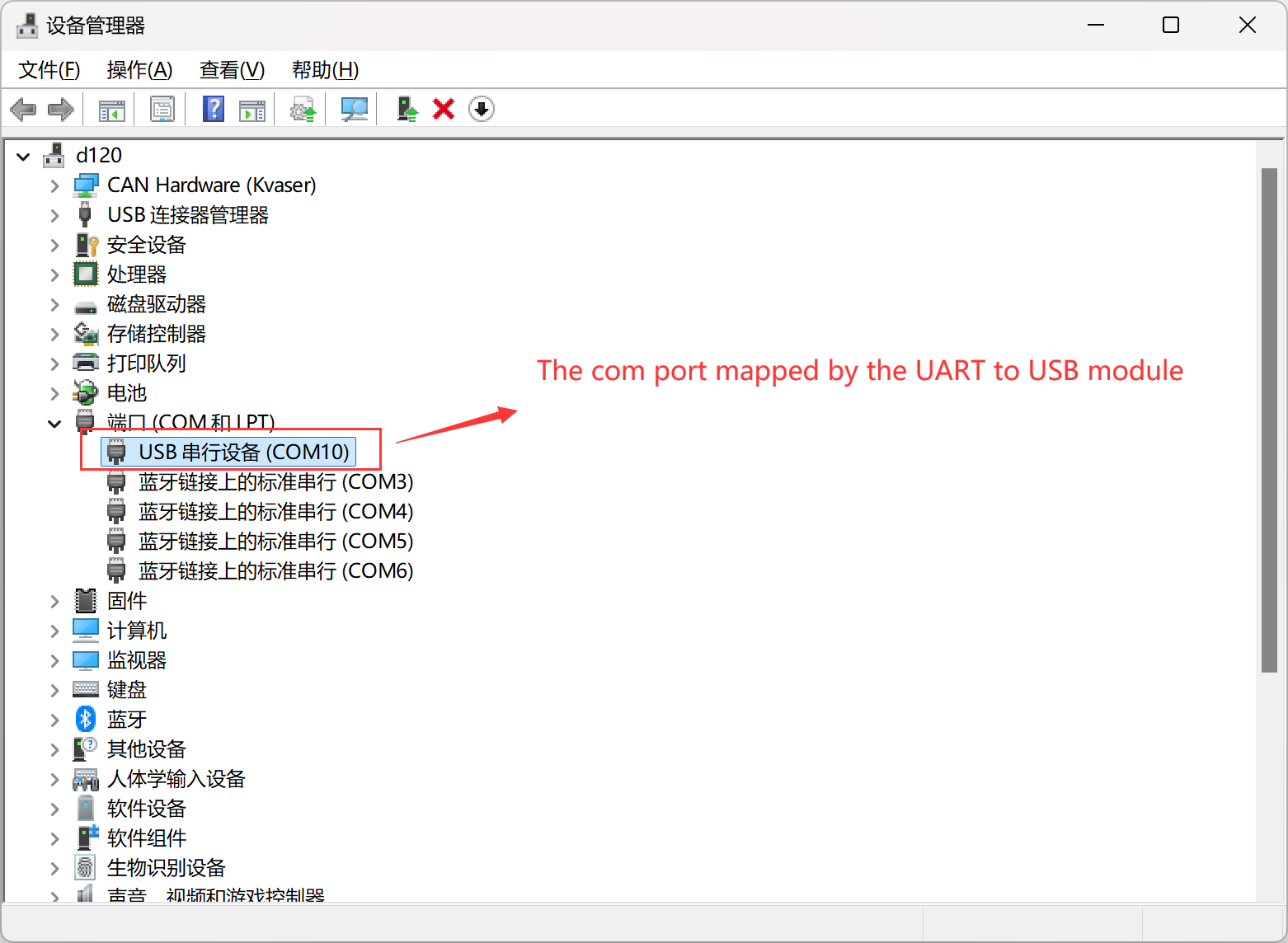
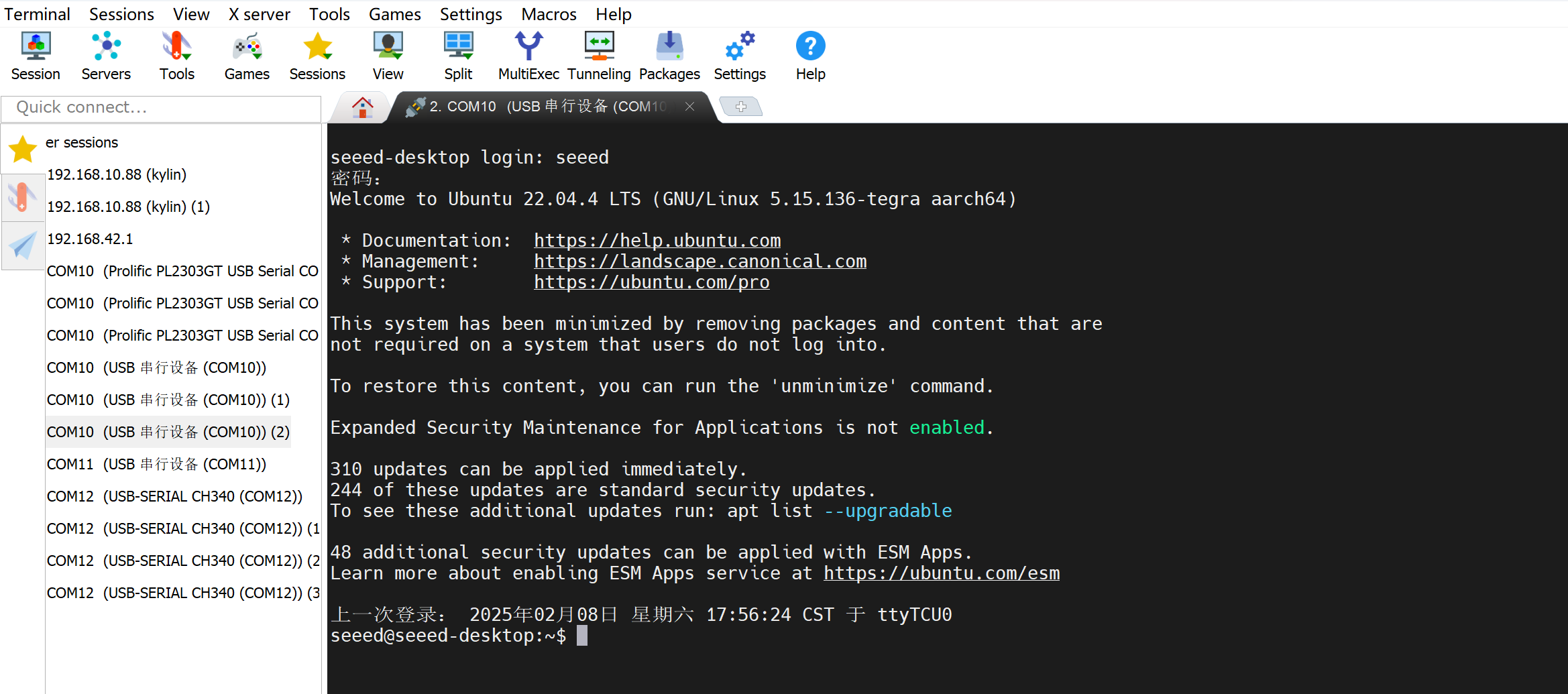
在PC上打开MobaXterm,点击"Session",然后点击"Serial"。根据**"设备管理器"**中映射的COM端口选择相应端口,并将波特率设置为115200。
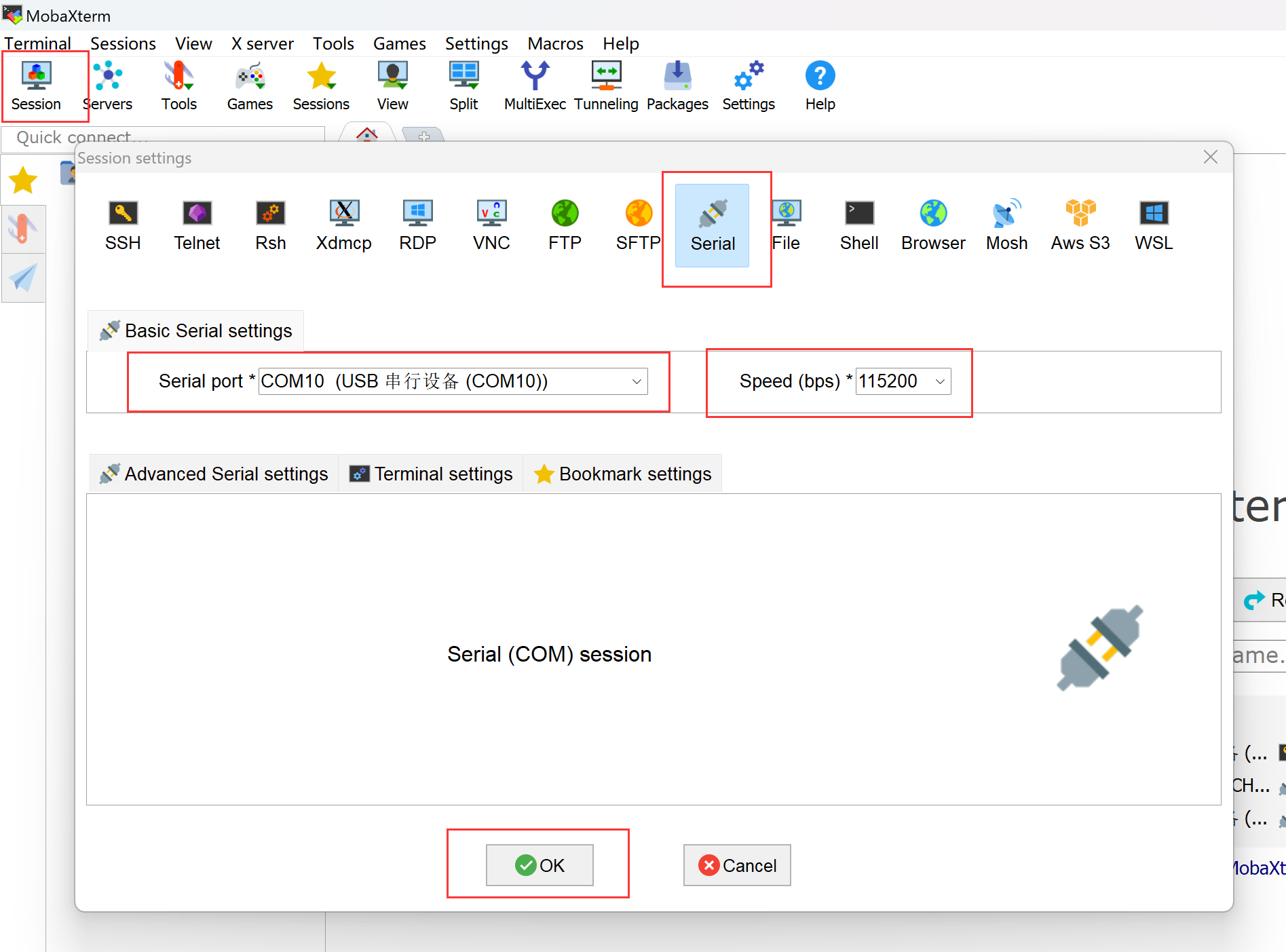
输入用户名和密码后,您将通过UART-DEBUG登录到reComputer Mini的终端。
RTC
reComputer Mini具有RTC接口,即使在系统断电时也能提供准确的计时功能。
将带有JST连接器的3V CR2032纽扣电池连接到板上的2针1.25mm JST插座。

FAN
reComputer Mini的板载风扇接口由nvfancontrol守护进程管理,该进程根据Jetson模块的运行状态自适应调节风扇转速。我们可以通过其配置文件/etc/nvfancontrol.conf来配置守护进程的工作模式。
更多信息,请查看这里。
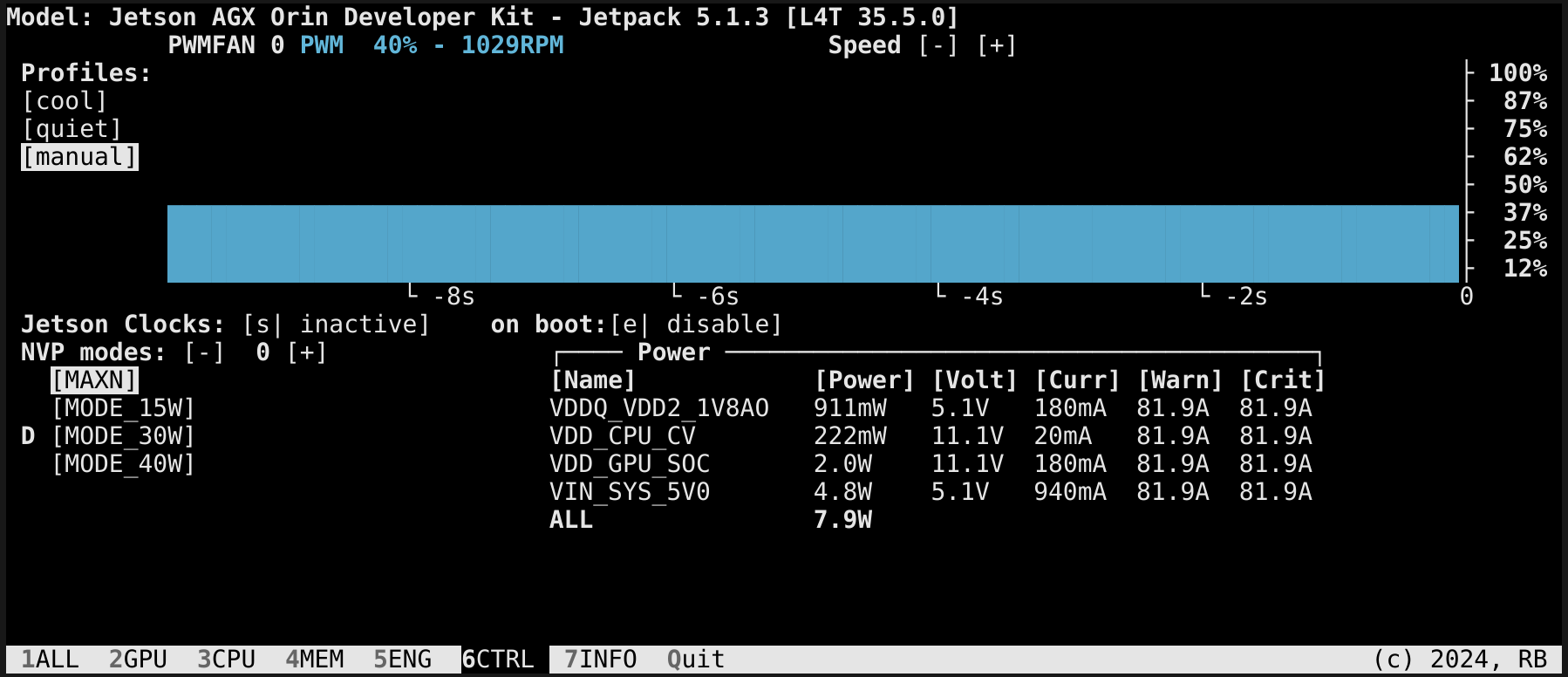
此外,我们可以使用jtop工具手动设置风扇转速。
您可以在终端中输入以下命令来安装jtop。
sudo apt update
sudo apt install python3-pip -y
sudo pip3 install jetson-stats
然后重启您的 reComputer Mini:
sudo reboot
安装 jtop 后,你可以在终端中启动它:
jtop
CAN
reComputer mini 具有两个 CAN 接口,扩展板上有四个外部 CAN 接口。CAN0 由两个 XT30 连接器 (2+2) 组成,而 CAN1 由两个 4 针 GH-1.25 连接器组成。

CAN0/CAN1 通信
硬件连接
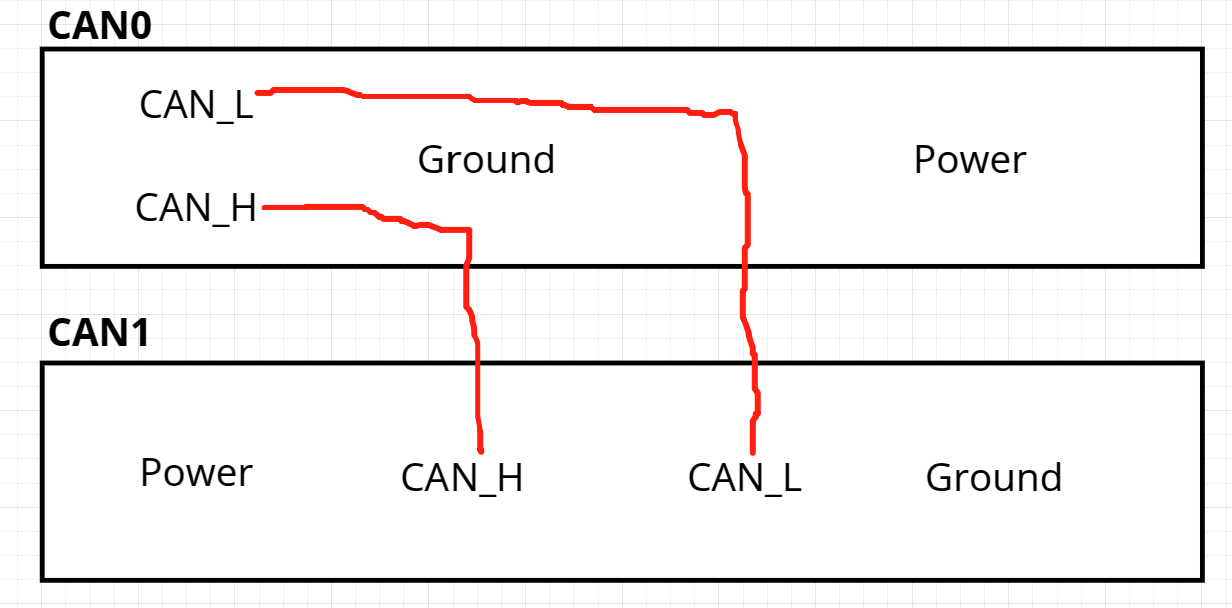
在数据手册中,您可以找到 CAN0/CAN1 接口的接线图,如下所示:
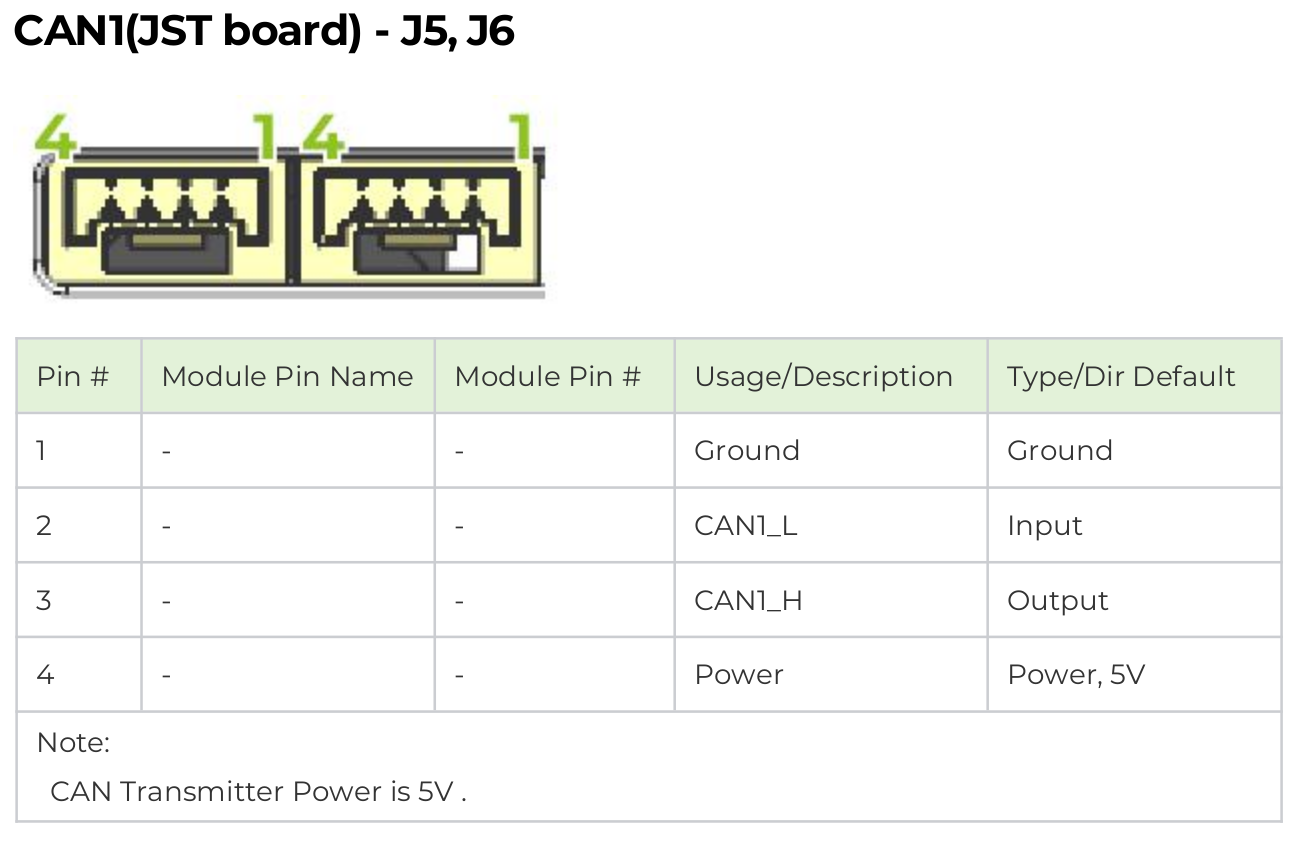

在使用 CAN0 和 CAN1 之前,请拆下底盖并将两个 120Ω 终端电阻都设置为 ON 位置。

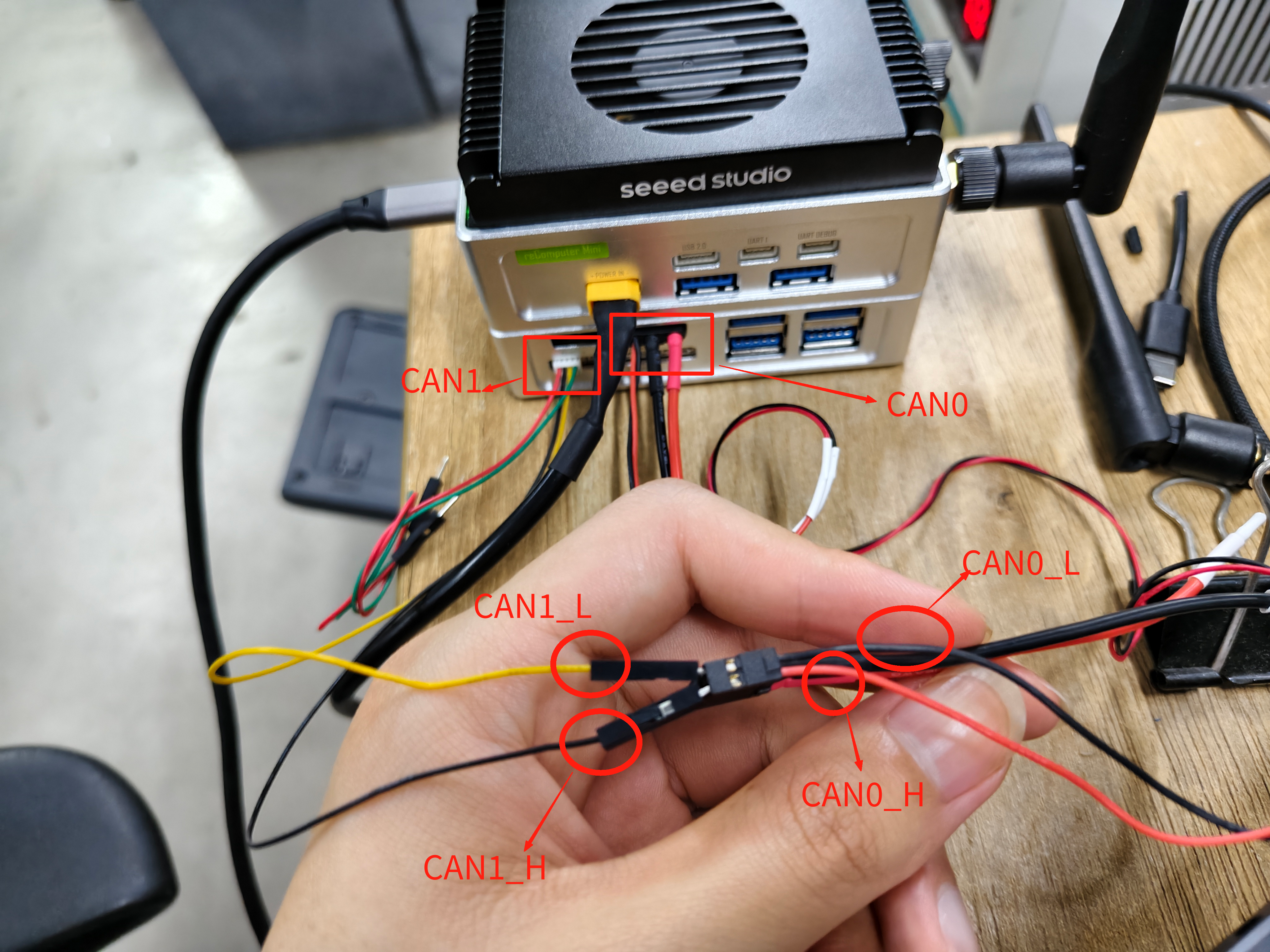
在这里,我们将演示以 125 kbps 的波特率从 CAN0 向 CAN1 连续发送数据 30 秒。 首先,如下图所示,将 CAN0 的信号线连接到 CAN1 的信号线。具体来说,将 CAN0_H 连接到 CAN1_H,将 CAN0_L 连接到 CAN1_L。
使用说明
完成硬件连接后。
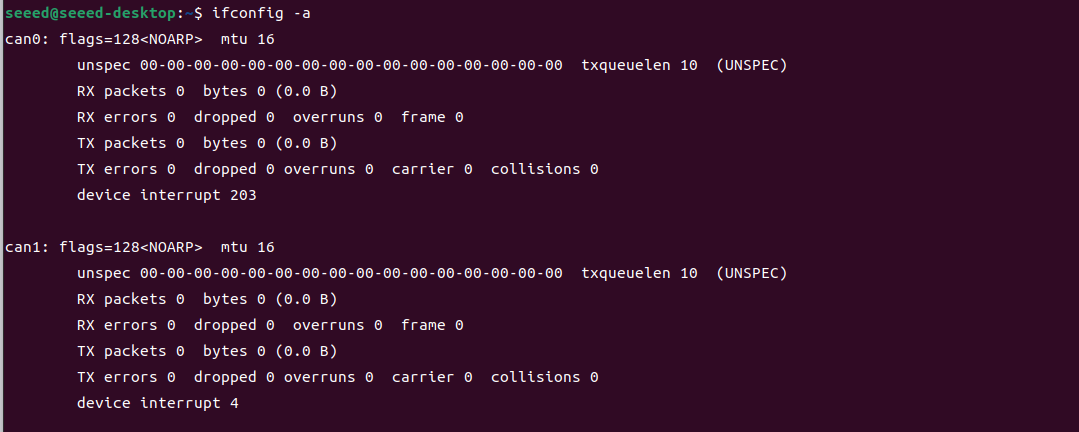
在终端中输入以下命令查看映射到 CAN0 和 CAN1 的设备名称:
ifconfig -a
这里,can0 对应 CAN0 接口,can1 对应 CAN1 接口。
在终端中安装 can-utils:
sudo apt-get update
sudo apt-get install can-utils
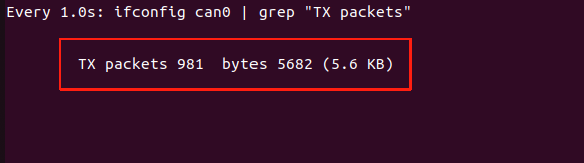
打开一个终端 1并输入以下命令来监控从can0发送的数据字节数:
watch -n 1 'ifconfig can0 | grep "TX packets"'
打开一个终端 2。从 GitHub 拉取用于测试 CAN 通信的脚本并运行它:
git clone https://github.com/jjjadand/Mini_CANtest.git
cd Mini_CANtest
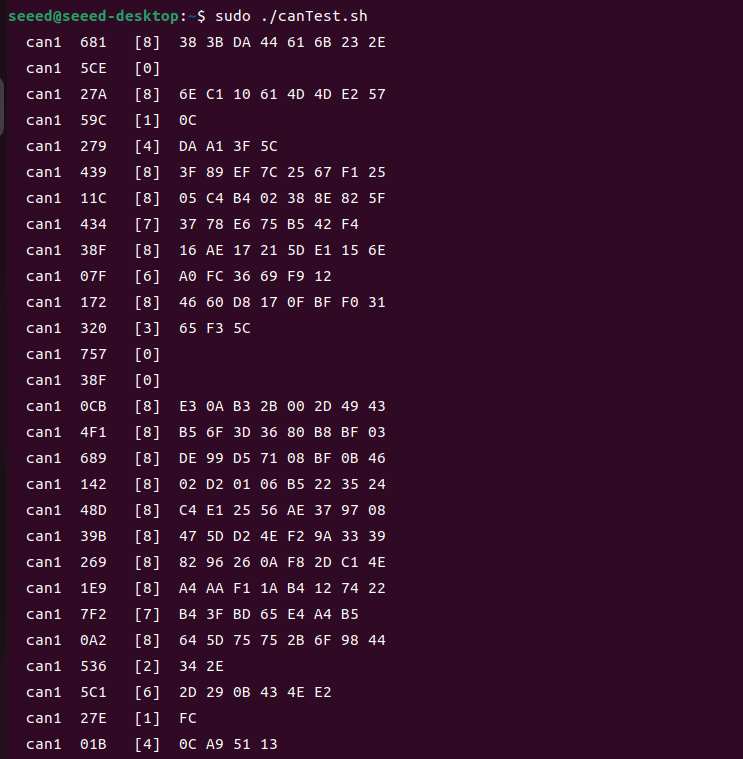
sudo ./canTest.sh
通过观察两个终端,您可以看到在终端1中,从CAN0发送的字节数正在增加。
终端2将打印CAN1从CAN0接收到的数据。
在在程序中使用 CAN 之前,你需要先启用它。在终端中运行以下命令:
sudo gpioset --mode=wait 0 106=0 #enable CAN1
sudo gpioset --mode=wait 0 43=0 #enable CAN0
CAN0 电源输出
CAN0-PPOWER的输出电压理论上等于reComputer Mini当前的DC输入电压。DC输入电压范围为12-54V。因此,**CAN0 XT30 (2+2)**的电源输出范围也是12-54V。
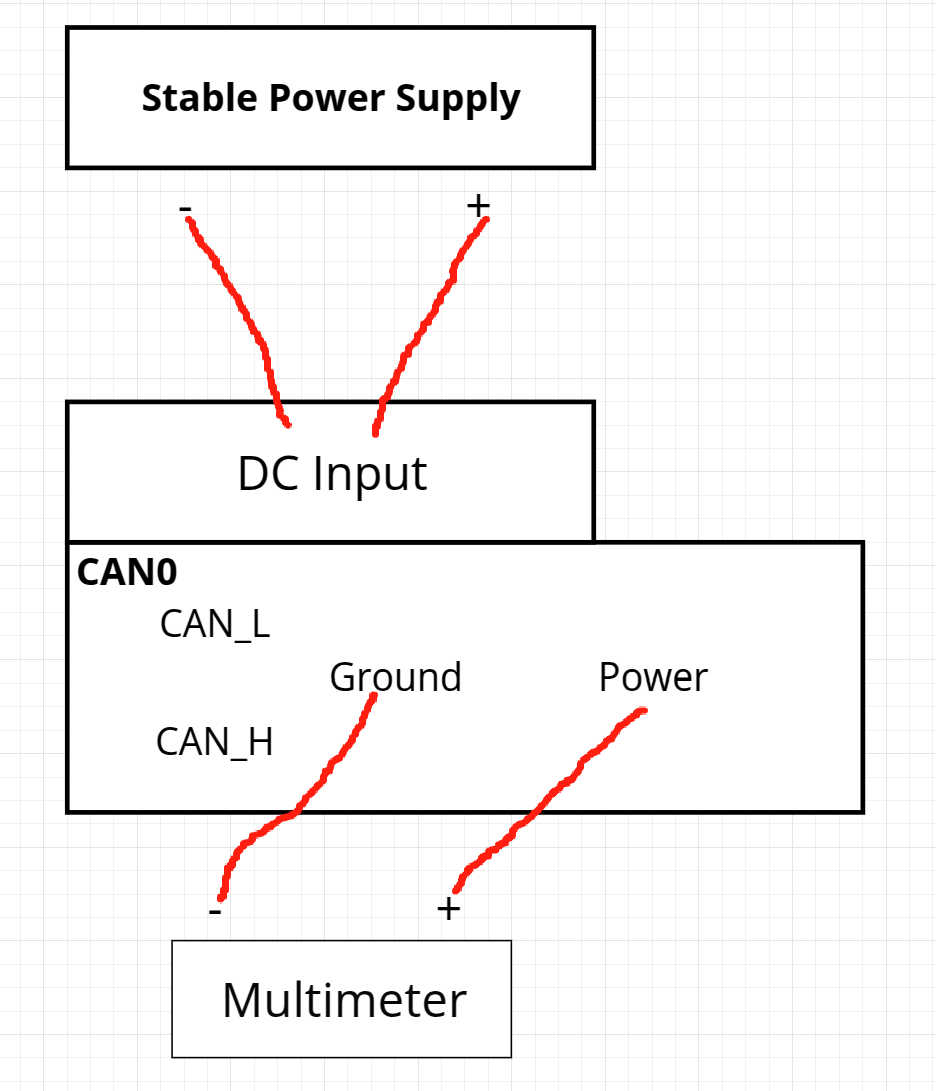
我们将为DC输入提供不同的电压,然后测量CAN0-PPOWER的输出电压。 使用稳定的电源和万用表,按照下图进行连接。
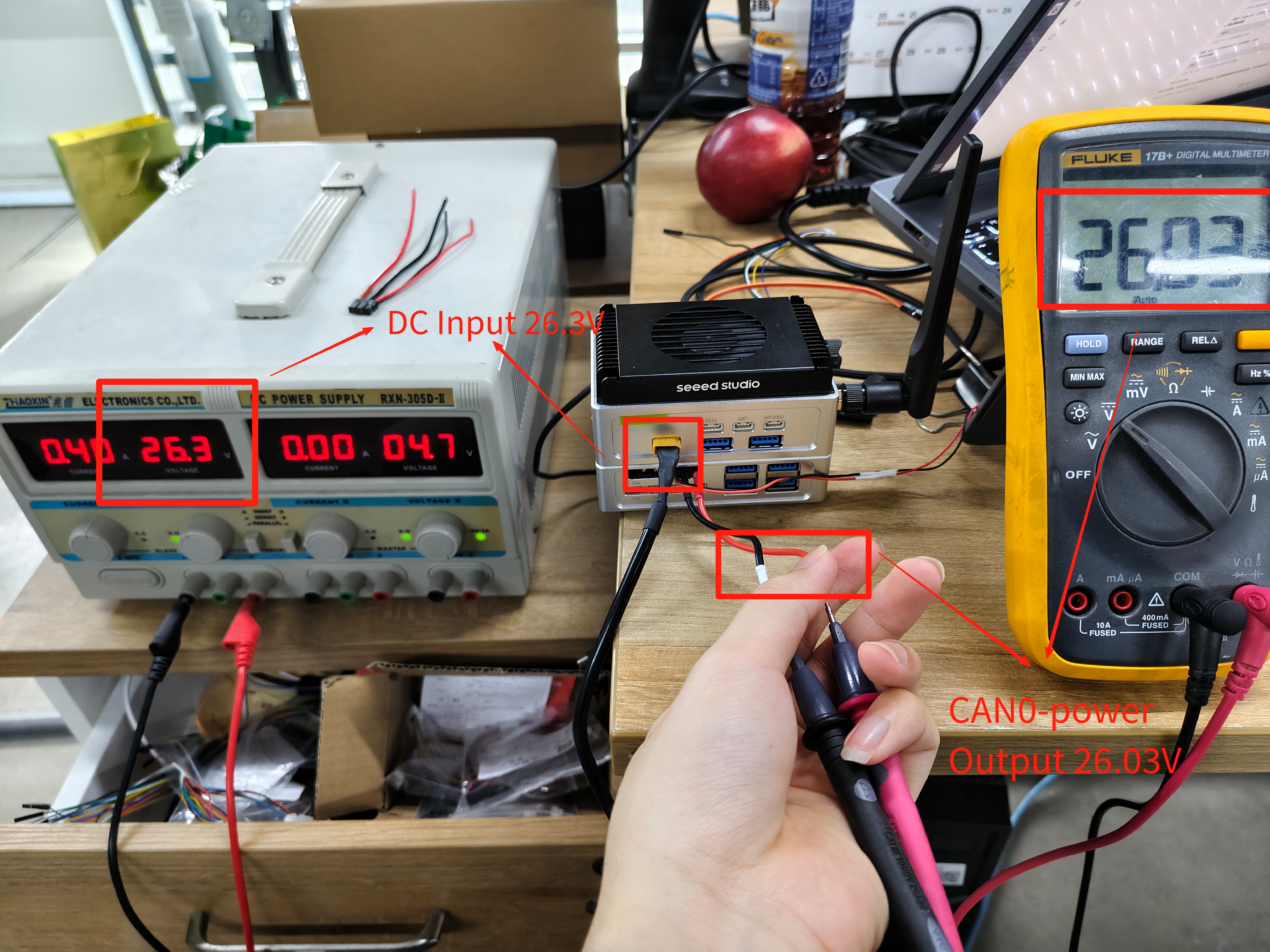
当DC输入为26.3V时,万用表测量CAN0-POWER输出为26.03V。
当DC输入为12.6V时,万用表测量CAN0-POWER输出为12.48V。
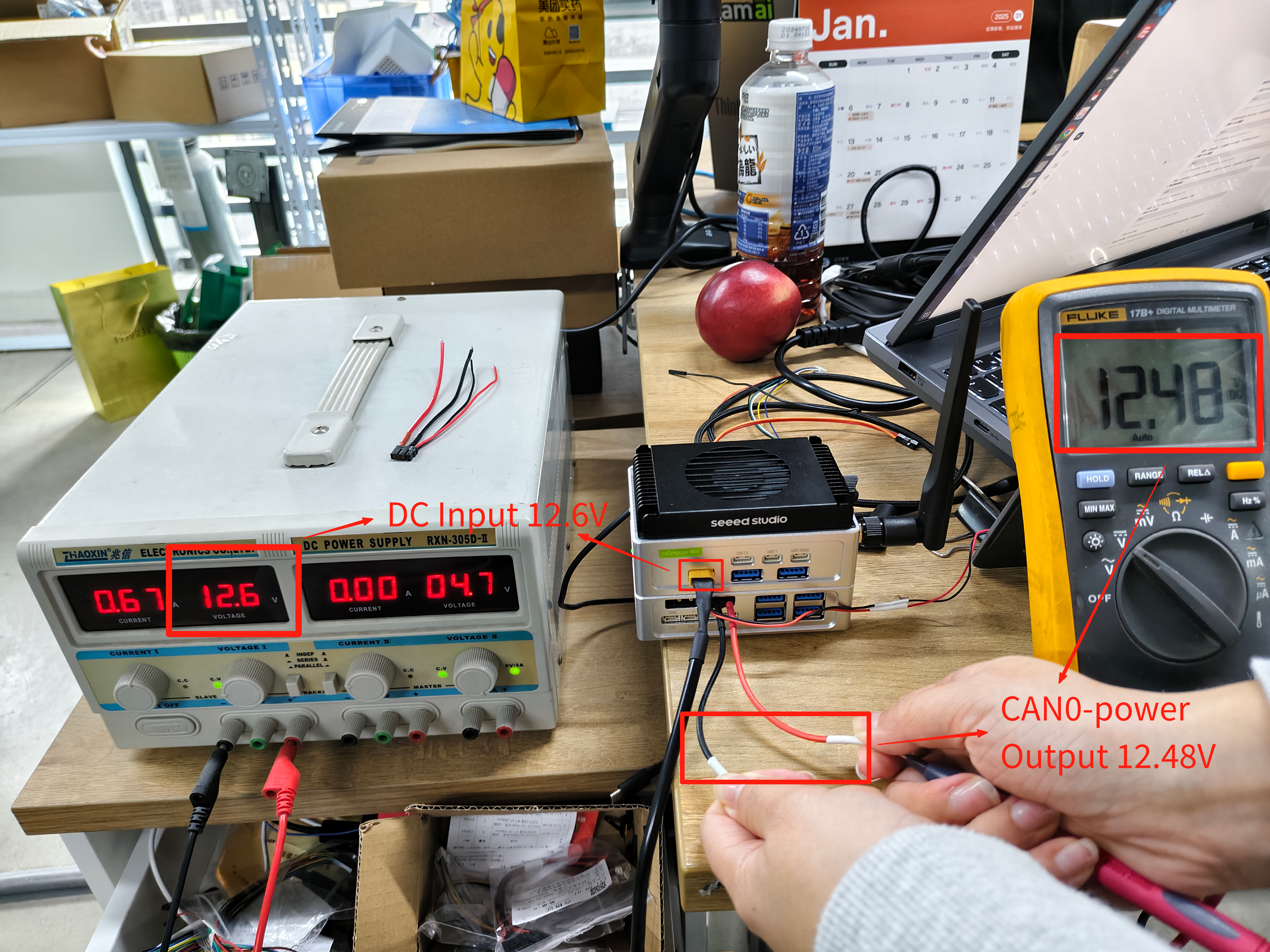
根据上述测试结果,可以看出CAN0-POWER的输出接近DC输入。 如果您想了解更多详细信息,可以参考原理图。
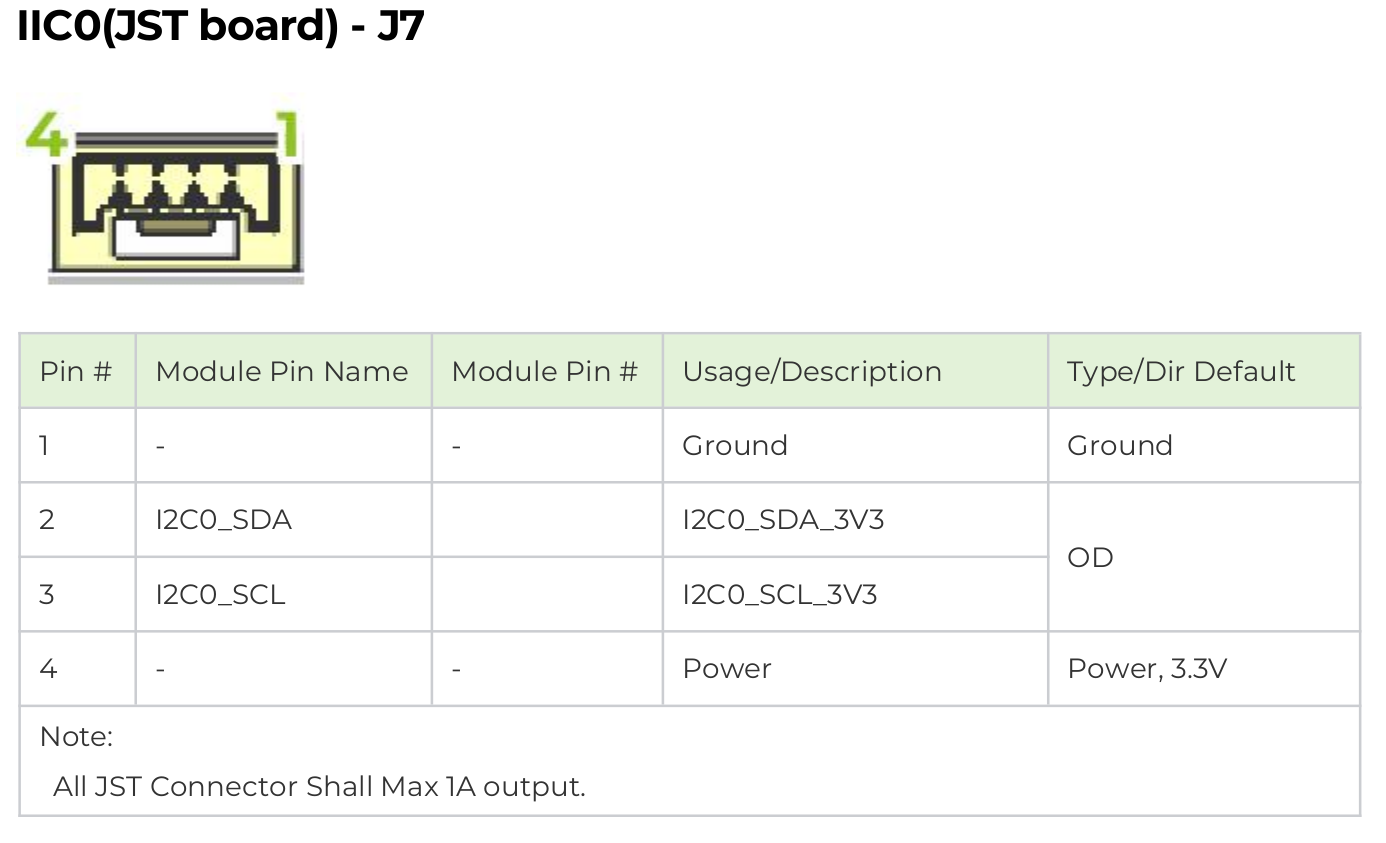
I2C
硬件连接
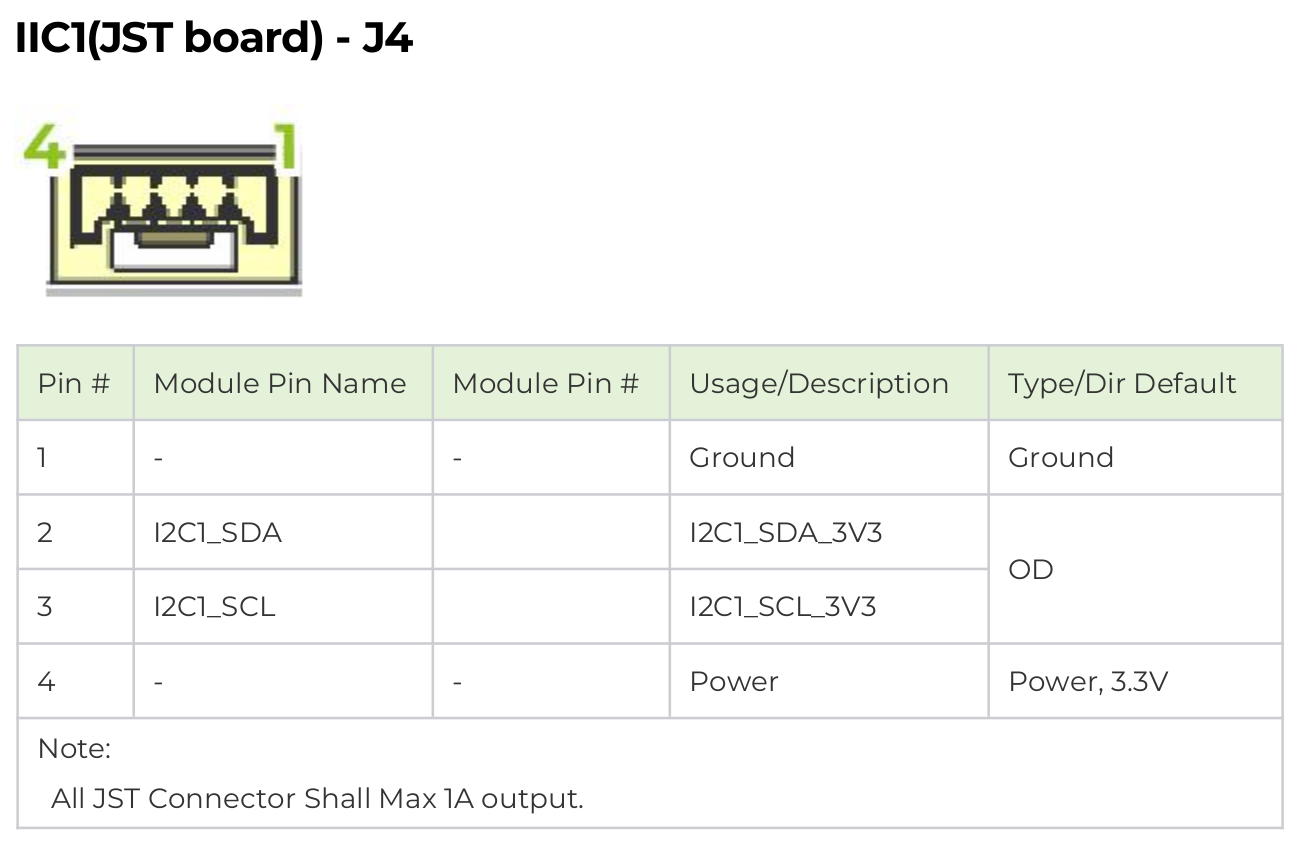
reComputer的扩展板具有两个4针GH-1.25 IIC接口,IIC0和IIC1。
在数据手册中,您可以找到IIC0/IIC1 4针GH-1.25接口的接线图,如下所示:
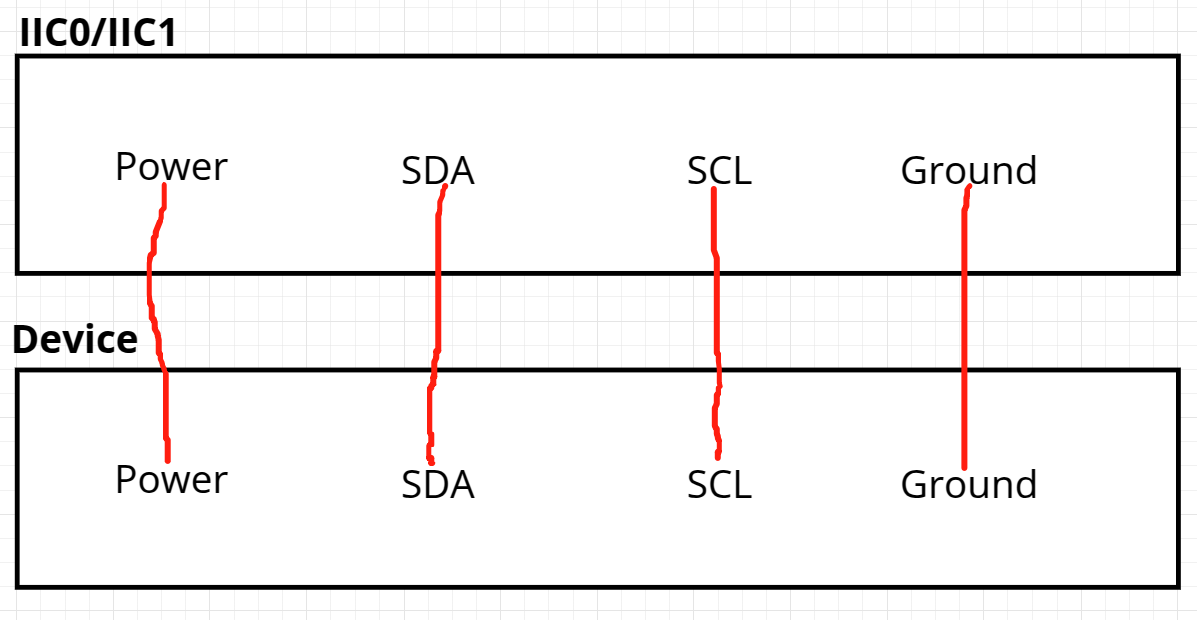
选择一个IIC接口设备进行测试;选择由您决定。这里使用一个IIC接口传感器连接到I2C0/I2C1进行测试。
这里的测试过程涉及扫描IIC0/IIC1上外部连接设备的地址。
使用说明
完成硬件连接后。
我们需要安装IIC测试工具。在扫描设备之前,在终端中输入以下内容:
sudo apt update
sudo apt-get install i2c-tools
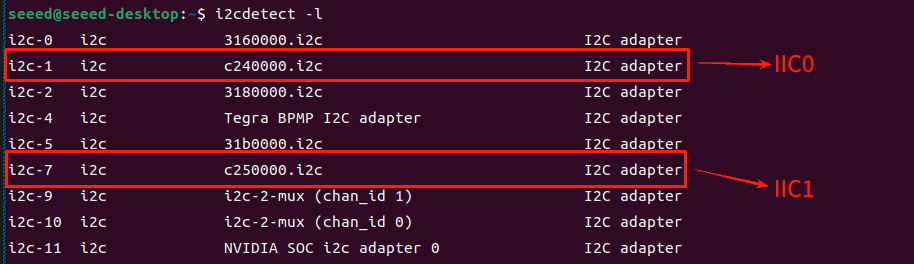
然后,在终端中输入以下命令以查看 IIC 总线上的映射名称。
i2cdetect -l
扩展板上的外部接口 IIC0-J7 对应 i2c-1 i2c c240000.i2c,外部接口 IIC1-J7 对应 i2c-7 i2c c250000.i2c。
连接外部 I2C 设备并设置其地址后,打开两个不同的终端并输入以下命令来扫描 I2C0 和 I2C1:
sudo i2cdetect -y -r 1
sudo i2cdetect -y -r 7
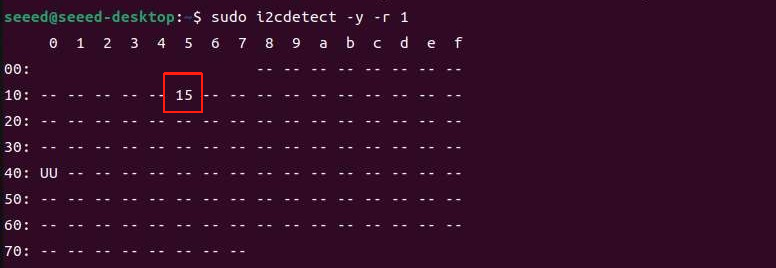
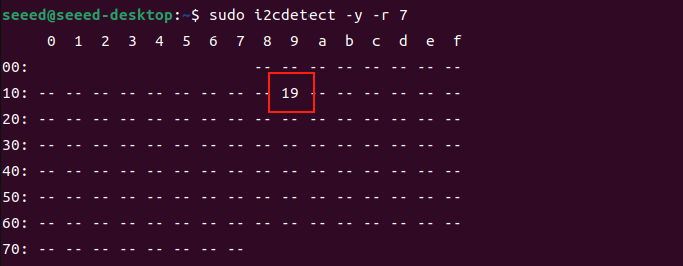
我们可以看到连接到 I2C0 的设备地址设置为 0x15,连接到 I2C1 的设备地址设置为 0x19。
SPI
硬件连接
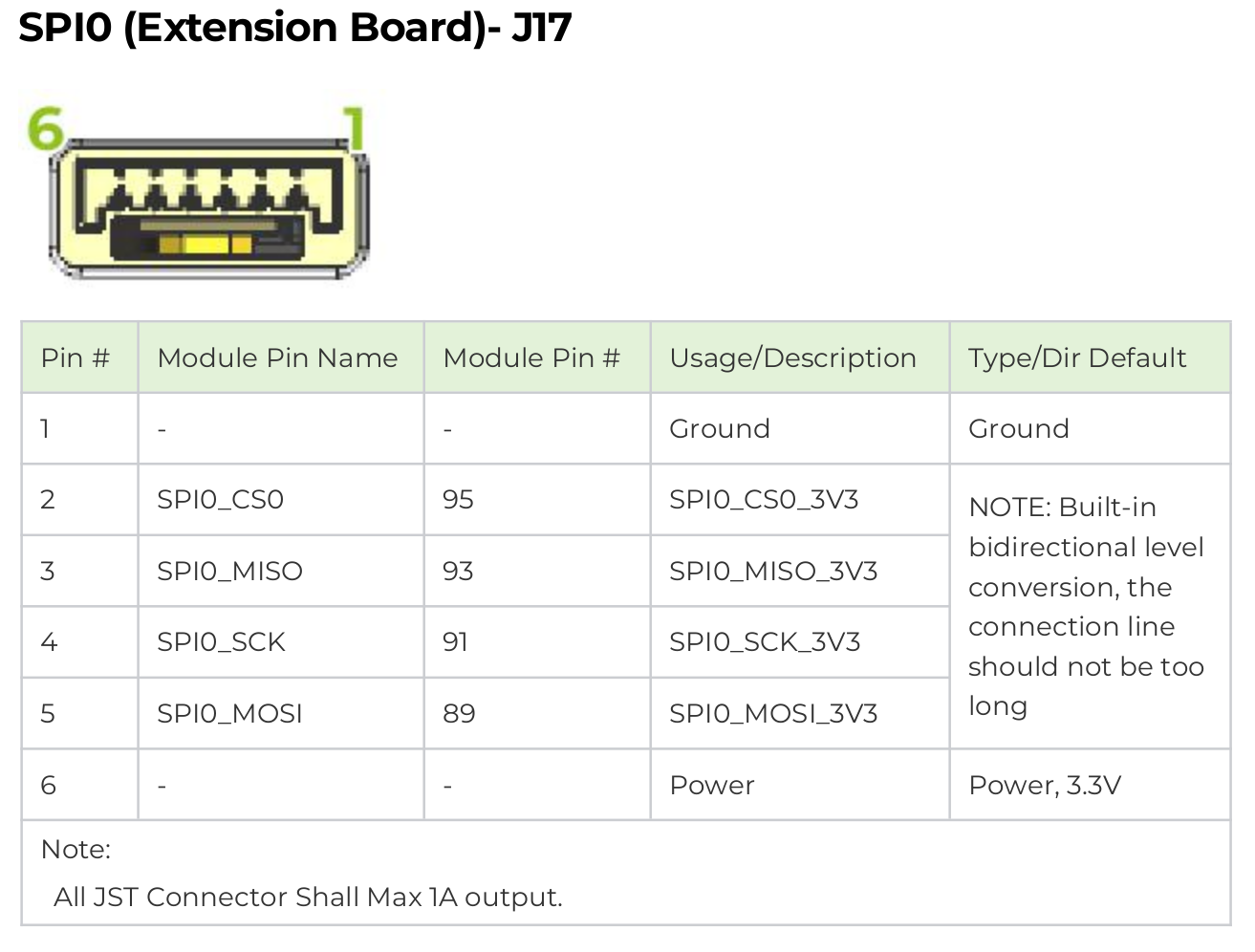
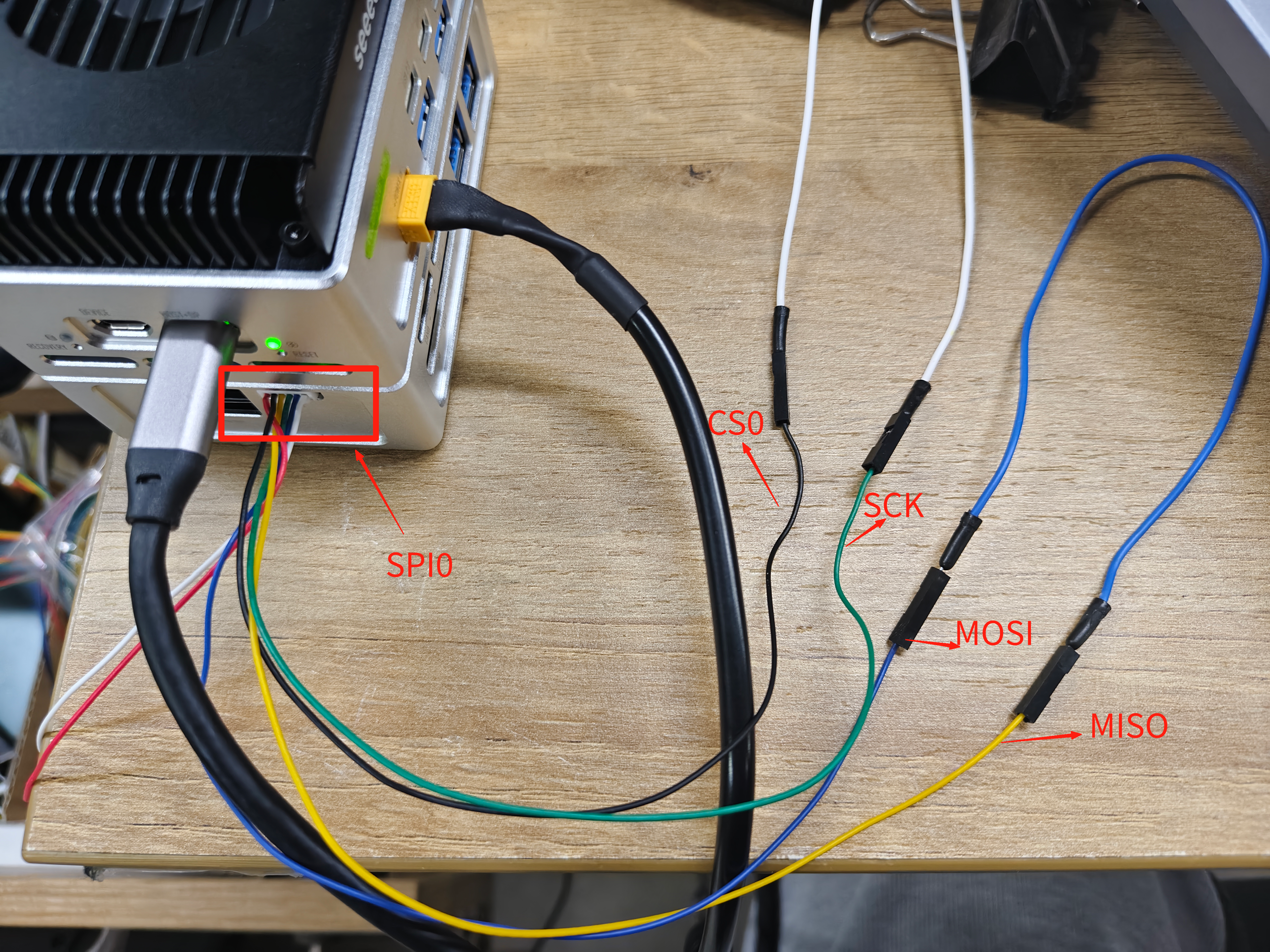
reComputer 的扩展板具有一个 6 针 GH-1.25 外部 SPI 接口。
在数据手册中,您可以找到 SPI 6 针 GH-1.25 接口的接线图,如下所示:
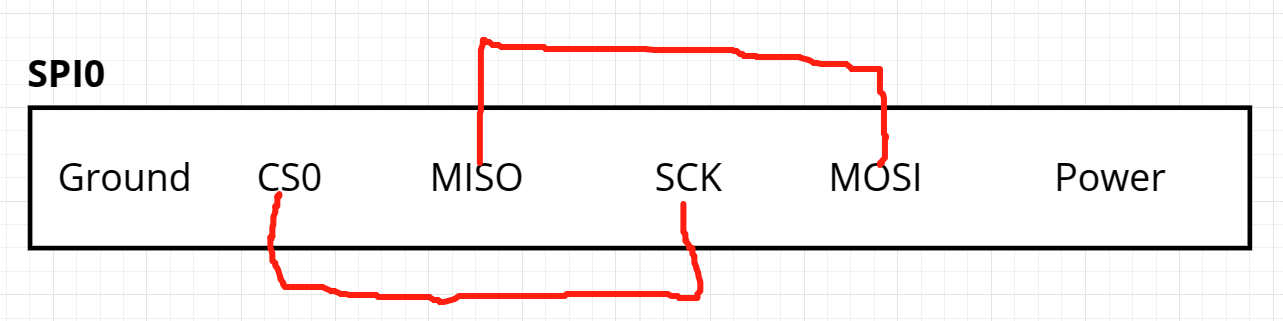
如果您不使用外部 SPI 转 USB 模块,您可以自行连接 6 针 GH-1.25 SPI 接口来测试数据传输和接收。将 MOSI 连接到 MISO,将 CS0 连接到 SCK。 接线图如下:
使用说明
完成硬件连接后。
然后,从 GitHub 拉取 SPI 测试代码并编译:
git clone https://github.com/rm-hull/spidev-test
cd spidev-test
gcc spidev_test.c -o spidev_test
在终端中输入以下命令来查看SPI映射的设备名称。例如,/dev/spidev0.0对应扩展板上的SPI0(J17)。
ls -l /dev/spi*

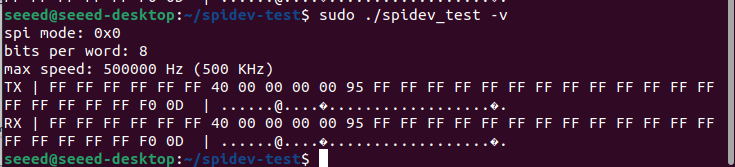
在终端中输入以下命令来运行 SPI 测试程序:
sudo ./spidev_test -v
您可以在扩展板(J17)上观察到在SPI0上传输和接收的数据。
资源
技术支持与产品讨论
感谢您选择我们的产品!我们在这里为您提供不同的支持,以确保您使用我们产品的体验尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。