Robotics J401 载板硬件与快速上手
reComputer Robotics J401 是一款紧凑型、高性能的边缘 AI 载板,专为高级机器人应用设计。它兼容 NVIDIA Jetson Orin Nano/Orin NX 模块,并支持 Super/MAXN 模式,可提供高达 157 TOPS 的 AI 性能。该载板配备丰富的连接选项——包括双千兆以太网端口、用于 5G 和 Wi-Fi/BT 模块的 M.2 插槽、6 个 USB 3.2 接口、CAN、GMSL2(通过可选扩展板)、I2C 和 UART——可作为强大的机器人“大脑”,处理来自各类传感器的复杂数据。预装 JetPack 6 和 Linux BSP,确保系统可无缝部署。
reComputer Robotics J401 支持 NVIDIA Isaac ROS、Hugging Face、PyTorch 和 ROS 2/1 等框架,将大语言模型驱动的决策能力与机器人实体控制(如运动规划和传感器融合)连接起来。它非常适合用于自主机器人快速开发,通过开箱即用的接口和优化的 AI 框架,加速产品上市进程。

reComputer Jetson Robotics J401 载板概览
| 顶视图 |
|---|
 |
| 顶视图 |
 |
| 顶视图 |
 |
清单
- reComputer Robotics J401 载板 x 1
- 电源和 JST 扩展板 x 1
- XT30 转 DC 线缆 x 1
- USB 线缆,Type A 转 Type C x 1
- 扩展板散热片 x 1
- 支柱 (M3*30) x 5
- M3 六角螺母 x 5
- 用于 Jetson 模块和 M.2 Key M 的螺丝 (CM2.5*L.4) x3
- 用于 M.2 Key E 的螺丝 (CM2*3.0) x1
- 用于 M.2 Key B 的支柱 (M2*2.0) x1
- 用于 M.2 Key B 的螺丝 (CM3*4.0) x1
- 用户手册 x 1
1.在高电压供电和高工作温度下,请根据《热设计指南》设计可靠的散热方案。 2.请为模块安装散热片以获得更佳性能。 3.在高电压输入和高负载运行期间,请勿触摸散热片,以防烫伤。 4.用于验证的电源适配器建议,请使用 Seeed 官方网站推荐的电源适配器。
- 19V/4.74A 5525 圆孔电源适配器
- 确保满足最大功耗需求。 2.AC 电源线兼容性
- 请根据所在地区购买对应规格的三叶草 AC 电源线。 3.配件兼容性
- 为获得最佳性能和兼容性,请仅使用官方推荐的配件(如无线模块、摄像头、外设等)。
规格
载板规格
| 类别 | 项目 | 详情 |
|---|---|---|
| 存储 | M.2 KEY M PCIe | 1x M.2 KEY M PCIe(内置 128G M.2 NVMe 2280 SSD) |
| 网络 | M.2 KEY E | 1x M.2 Key E,用于 WiFi/Bluetooth 模块 |
| M.2 KEY B | 1x M.2 Key B,用于 5G 模块 | |
| Ethernet | 2x RJ45 千兆以太网 | |
| I/O | USB | 6x USB 3.2 Type-A (5Gbps); 1x USB 3.0 Type-C (Host/DP 1.4); 1x USB 2.0 Type-C (Device Mode/Debug) |
| Camera | 1x 4 合 1 GMSL2(mini fakra)(可选板) | |
| CAN | 2x CAN0(XT30(2+2)); 3x CAN1(4-Pin GH 1.25 插针) | |
| Display | 1x DP1.4(Type C Host) | |
| UART | 1x UART 4-Pin GH 1.25 插针 | |
| I2C | 2x I2C 4-Pin GH 1.25 插针 | |
| Fan | 1x 4-Pin 风扇接口(5V PWM); 1x 4-Pin 风扇接口(12V PWM) | |
| Extension Port | 1x 摄像头扩展排针(用于 GMSL2 板) | |
| RTC | 1x RTC 2-pin; 1x RTC 插座 | |
| LED | 3x LED(PWR、ACT 和用户 LED) | |
| Pinhole Button | 1x PWR; 1x RESET | |
| DIP Switch | 1x REC | |
| Antenna Hole | 5x 天线孔 | |
| 电源 | 19-54V XT30(2+2)(附带 XT30 转 5525 DC 插孔线缆) | |
| Jetpack 版本 | Jetpack 6 | |
| 机械特性 | 尺寸 (W x D x H) | 115mm x 115mm x 38mm |
| 重量 | 200g | |
| 安装方式 | 桌面、壁挂 | |
| 工作温度 | -20℃~60℃(25W 模式); -20℃~55℃(MAXN 模式); (搭配 reComputer Robotics 带风扇散热片) | |
| 质保 | 2 年 | |
| 认证 | RoHS, REACH, CE, FCC, UKCA, KC | |
刷写 JetPack OS
支持的模块
- NVIDIA® Jetson Orin™ Nano Module 4GB
- NVIDIA® Jetson Orin™ Nano Module 8GB
- NVIDIA® Jetson Orin™ NX Module 8GB
- NVIDIA® Jetson Orin™ NX Module 16GB
前置准备
- Ubuntu 主机电脑
- Robotics J401 载板
- NVIDIA® Jetson Orin™ Nano/NX 模块
- Nano/NX 模块主动散热风扇
- NVMe M.2 2280 内置 SSD
- USB Type-C 数据传输线
我们建议使用物理 Ubuntu 主机设备,而不是虚拟机。 请参考下表准备主机环境。
| JetPack Version | Ubuntu Version (Host Computer) | ||
| 18.04 | 20.04 | 22.04 | |
| JetPack 6.x | ✅ | ✅ | |
准备 Jetpack 镜像
在这里,我们需要在 Ubuntu PC 上下载与所使用 Jetson 模块对应的系统镜像:
| Jetpack 版本 | Jetson 模块 | GMSL | 下载链接 1 | SHA256 |
|---|---|---|---|---|
| 6.2 | Orin Nano 4GB | ✅ | Download | c63d1219531245abecc7bbdcafc73d3 4f75547454c7af85de40f08396a87e5ee |
| Orin Nano 8GB | ✅ | Download | 5d1f3cd28eb44ca60132c87ccce5aca f806ee945b486df9061a34de73fbb582b | |
| Orin NX 8GB | ✅ | Download | e7f0c8e6b578d411f81122879f92c76 66adfada5ed493a4cc458dc169ca8c1b7 | |
| Orin NX 16GB | ✅ | Download | b08cbdad8ab6e50222146d3175a9d2 627d499bf1d67cfaf69cc737b5bfa9e33a |
Jetpack6 镜像文件大小约为 14.2GB,下载大约需要 60 分钟,请耐心等待下载完成。
要验证下载固件的完整性,可以对比 SHA256 哈希值。
在 Ubuntu 主机上打开终端,运行命令 sha256sum <File> 获取下载文件的 SHA256 哈希值。如果结果与本 wiki 中提供的 SHA256 值一致,则说明你下载的固件是完整且未损坏的。
进入强制恢复模式
在继续安装步骤之前,我们需要确保载板已进入强制恢复模式。
Step-by-Step
步骤 1. 将拨码开关切换到 RESET 模式。

步骤 2. 连接电源线以给载板供电。
步骤 3. 使用 USB Type-C 数据传输线将载板连接到 Ubuntu 主机电脑。
步骤 4. 在 Linux 主机电脑上打开终端窗口并输入命令 lsusb。如果根据你使用的 Jetson SoM,返回的内容中包含以下输出之一,则说明载板已进入强制恢复模式。
- 对于 Orin NX 16GB:0955:7323 NVidia Corp
- 对于 Orin NX 8GB:0955:7423 NVidia Corp
- 对于 Orin Nano 8GB:0955:7523 NVidia Corp
- 对于 Orin Nano 4GB:0955:7623 NVidia Corp
下图为 Orin Nano 8GB 的示例

刷写到 Jetson
步骤 1: 解压下载的镜像文件:
cd <path-to-image>
sudo tar xpf mfi_xxxx.tar.gz
# For example: sudo tar xpf mfi_recomputer-robo-orin-nano-8g-j401-gmsl-6.2-36.4.3-2026-02-06.tar.gz
步骤 2: 执行以下命令将 jetpack 系统刷写到 NVMe SSD:
cd mfi_xxxx
# For example: cd mfi_recomputer-orin-robotics-j401
sudo ./tools/kernel_flash/l4t_initrd_flash.sh --flash-only --massflash 1 --network usb0 --showlogs
如果刷写过程成功,你将看到如下输出

刷写命令可能需要运行 2-10 分钟。
步骤 3: 将 Robotics J401 连接到显示器,可使用 PD 转 HDMI 转接器连接到支持 HDMI 输入的显示器,或使用 PD 线直接连接到支持 PD 输入的显示器,并完成初始配置设置:

请根据你的需求完成 System Configuration。
接口使用
下面将介绍 Robotics J401 载板的各类接口及其使用方法。
M.2 Key M
M.2 Key M 专为高速 NVMe SSD 设计,为机器人应用提供超高速数据传输。
支持的 SSD 如下
- 128GB NVMe M.2 PCle Gen3x4 2280 Internal SSD
- 256GB NVMe M.2 PCle Gen3x4 2280 Internal SSD
- 512GB NVMe M.2 PCle Gen3x4 2280 Internal SSD
- 1TB NVMe M.2 PCle Gen3x4 2280 Internal SSD
- 2TB NVMe M.2 PCle Gen3x4 2280 Internal SSD
硬件连接

使用说明
在 Jetson 设备中打开终端,输入以下命令测试 SSD 的读写速度。
#You need to create a blank test file first
sudo touch /ssd/test
dd if=/dev/zero of=/home/seeed/ssd/test bs=1024M count=5 conv=fdatasync

测试完成后,请运行 sudo rm /home/seeed/ssd/test 命令删除缓存文件。
M.2 Key B
M.2 Key B 插槽用于 5G 模组扩展,为机器人和边缘 AI 场景提供高速蜂窝网络连接。
硬件连接

使用说明
步骤 1. 检查硬件识别情况
lsusb
该命令会显示系统中所有已连接的 USB 设备列表,以及它们的厂商(ID)、类型和其他信息。例如,输出中可能会显示来自 Quectel Wireless Solutions Co., Ltd. 的 EM12-G 设备,表明 5G 模组已存在。

步骤 2. 确认驱动加载 必须确保 5G 模组所需的 option 驱动已加载。我们可以使用 lsmod 命令进行检查。
lsmod | grep option
如果 option 驱动加载成功,输出中会显示与该驱动相关的信息。

步骤 3. 配置 ModemManager ModemManager 是一个用于管理调制解调器设备的工具,需要安装并重启。
sudo apt install modemmanager
sudo systemctl restart ModemManager
apt install 命令用于安装 ModemManager 软件包,而 systemctl restart 用于重启 ModemManager 服务,以确保新设置生效。
步骤 4. 验证模组识别 我们可以使用 mmcli -L 命令检查 ModemManager 是否能正确识别 5G 模组。
mmcli -L
如果 5G 模组被识别,将会显示类似 /org/freedesktop/ModemManager1/Modem/0 的输出,表示检测到的调制解调器设备路径。

步骤 5. 设置 APN APN(接入点名称)对于移动设备连接网络至关重要。我们将使用 nmcli 命令创建承载配置文件。以中国移动为例,可以使用以下命令创建配置文件:
sudo nmcli con add type gsm ifname "*" apn "CMNET" ipv4.method auto
该命令添加一个新的 GSM(全球移动通信系统)类型连接,将 APN 指定为 "CMNET",并使用自动 IPv4 配置。

步骤 6. 激活连接 创建承载配置文件后,我们需要激活该连接。
sudo nmcli con up "gsm"
该命令会激活 GSM 连接,如果成功,将显示确认信息。
步骤 7. 再次验证模组识别 再次运行 mmcli -L 命令,以确保在配置 APN 之后模组仍然被识别。
mmcli -L
步骤 8. 检查模组状态 最后,我们可以使用 mmcli -m 0 命令查看模组的详细信息,例如 IP 分配、运营商以及网络连接状态。
mmcli -m 0
该命令会提供有关 5G 模组的详细信息,包括其制造商、型号、支持和当前使用的网络技术、设备状态以及已连接的网络运营商。

M.2 Key E
M.2 Key E 接口是标准的 M.2 连接器,主要用于连接无线模组,例如 Wi-Fi 和蓝牙,以扩展无线通信能力。
硬件连接

使用说明
要测试 Wi-Fi 性能,请使用以下命令(将 IP 地址替换为你的测试服务器):
iperf3 -c 192.168.6.191

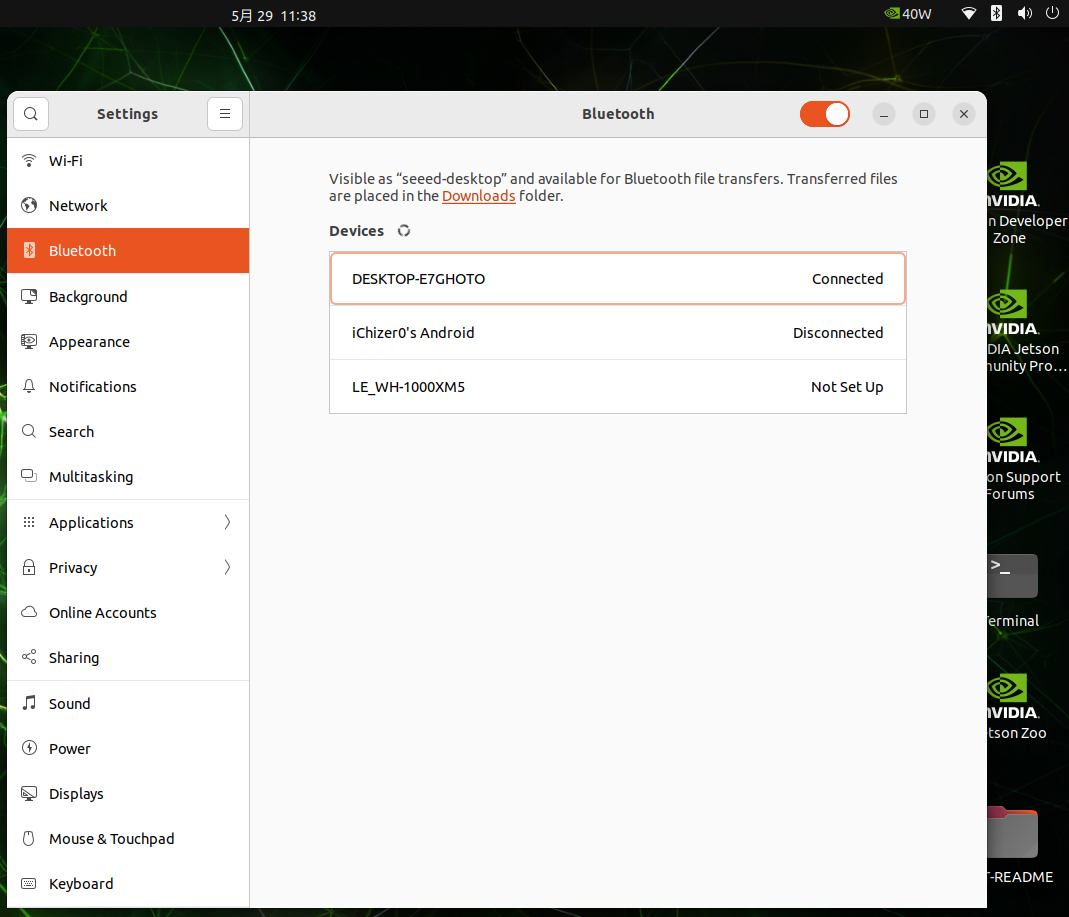
蓝牙功能可通过 M.2 Key E 插槽实现。
以太网
Robotics j401 载板配备 2 个 1Gbps RJ45 以太网端口,用于高速有线网络连接。

要测试以太网端口速度,请按如下方式使用 iperf3:
iperf3 -c <server_ip> -B <bind_ip>
<server_ip> 是 iperf3 服务器的 IP 地址。客户端将连接到该服务器以执行带宽测试。
<bind_ip> 将指定的本地 IP 地址绑定为测试流量的源地址。

LED
reComputer Jetson Robotics J401 配备 3 个 LED 指示灯(PWR、ACT 和 User LED),可为电源、系统活动和用户自定义功能提供清晰的状态反馈。

使用说明
User LED 是一个 RGB LED,可以显示不同颜色以指示各种状态,需要由用户自行定义。
下面是一个用于控制 RGB LED 的测试脚本:
touch rgb_test
chmod +x rgb_test
vi rgb_test
粘贴以下内容:
#!/bin/bash
# RED ON
gpioset --mode=time --sec=1 2 0=1
sleep 2
# RED OFF
gpioset --mode=time --sec=1 2 0=0
# Blue ON
gpioset --mode=time --sec=1 2 1=1
sleep 2
# Blue OFF
gpioset --mode=time --sec=1 2 1=0
# Green ON
gpioset --mode=time --sec=1 2 2=1
sleep 2
# Green OFF
gpioset --mode=time --sec=1 2 2=0
运行该脚本以测试 RGB LED。

USB
Robotics j401 载板配备多种 USB 接口,包括 6 个 USB 3.2 Type-A 端口(5Gbps)、1 个带 DP 1.4(Host 模式)的 USB 3.0 Type-C 端口,以及 1 个用于设备模式/调试的 USB 2.0 Type-C 端口,提供多样化的连接选项。
USB 速度测试
创建一个脚本来测试 USB 设备速度:
sudo vim test_usb
粘贴以下内容:
#!/bin/bash
sudo dd if=/dev/zero of=/dev/$1 bs=1000M count=2 conv=fdatasync
sleep 1
sudo sh -c "sync && echo 3 > /proc/sys/vm/drop_caches"
sleep 1
sudo dd if=/dev/$1 of=/dev/null bs=1000M count=2
使脚本具有可执行权限:
sudo chmod +x test_usb
使用你的 USB 设备名称作为参数运行该脚本。
USB 2.0 Type-C 接口
通过该串口和 USB C 数据线,你可以在 PC 端监控输入和输出的调试信息。
步骤 1. 将拨码开关切换到调试模式。

步骤 2. 通过 USB 数据线连接 PC,在你的 PC 上下载 CP210X Driver。

步骤 3. 通过 USB 数据线连接 PC,解压下载的文件并在你的 PC 上安装驱动。

步骤 4. 在 Windows PC 上打开 Device Manager,并检查分配给 reComputer Super 的 COM 端口号。它应显示在 "Ports (COM & LPT)" 下,名称为 "Silicon Labs CP210x USB to UART Bridge (COMX)",其中 X 为 COM 端口号。

步骤 5. 打开串口工具(这里以 MobaXterm 工具为例),创建一个新会话。

步骤 6. 选择 Serial 工具。

步骤 7. 选择对应的串口,将波特率设置为 115200 并点击 "OK"。

步骤 8. 使用用户名和密码登录你的 reComputer Super。

USB 摄像头
通过 USB 3.2 Type-A 接口使用 USB 摄像头,安装并运行 guvcview:
sudo apt-get install guvcview
guvcview -d /dev/video0

风扇
reComputer Jetson Robotics J401 配备了两种类型的风扇连接器,以满足不同电压和散热需求:
-
1x 4-Pin 风扇连接器(5V PWM):专为低电压、低功耗静音风扇设计,该连接器支持 PWM 转速控制,可根据系统温度智能调节风扇转速,从而提高能效并降低噪音。
-
1x 4-Pin 风扇连接器(12V PWM):兼容标准 12V PWM 风扇,同样支持精确转速控制,非常适合高性能散热需求。
硬件连接

更多信息请查看这里。
创建一个脚本来设置风扇转速:
cat test_fanSpeedSet
粘贴以下内容:
#!/bin/bash
sudo systemctl stop nvfancontrol
sleep 2
echo "000000" | sudo -S chmod 777 /sys/devices/platform/pwm-fan/hwmon/hwmon1/pwm1
echo $1 > /sys/devices/platform/pwm-fan/hwmon/hwmon1/pwm1
注意:对于 Jetson Nano 4G,风扇路径为
/sys/devices/platform/pwm-fan/hwmon/hwmon0/pwm1。
此外,我们可以使用 jtop 工具手动设置风扇转速。
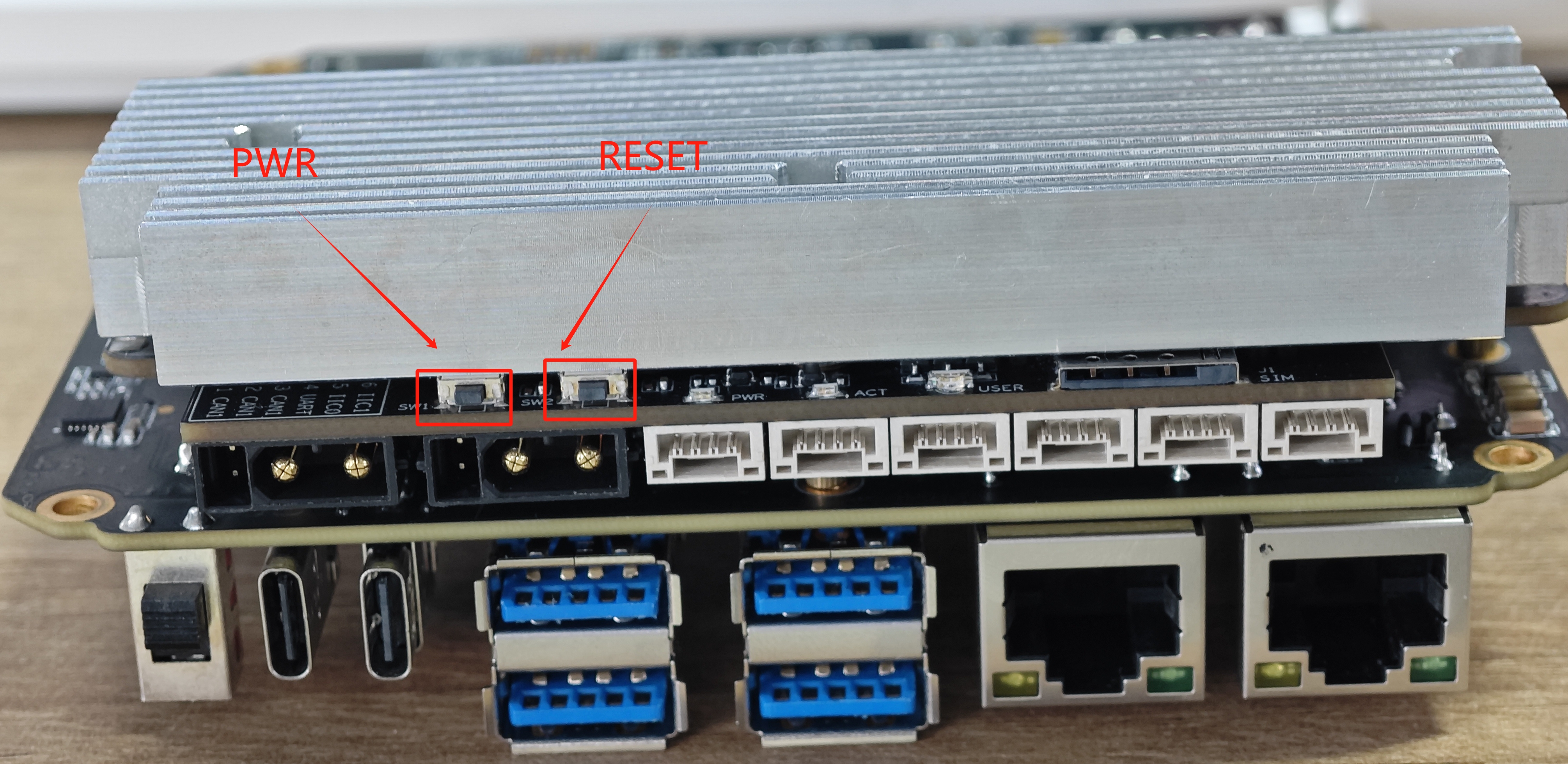
针孔按键
Robotics J401 载板配备了用于用户交互的针孔按键,包括电源(PWR)按键和重置(RESET)按键。这些按键分别用于设备的开关机和系统重启。
CAN
CAN(Controller Area Network,控制器局域网)是一种可靠的车载总线标准,使微控制器和设备无需主机计算机即可相互通信。 Robotics J401 在 XT30(2+2)电源连接器中集成了一个 CAN0 接口,用于方便的电源和数据传输。此外,还通过两个标准 JST 4-pin 接口提供 3 个 CAN1 接口,以实现灵活的 CAN 总线连接。
CAN 通信
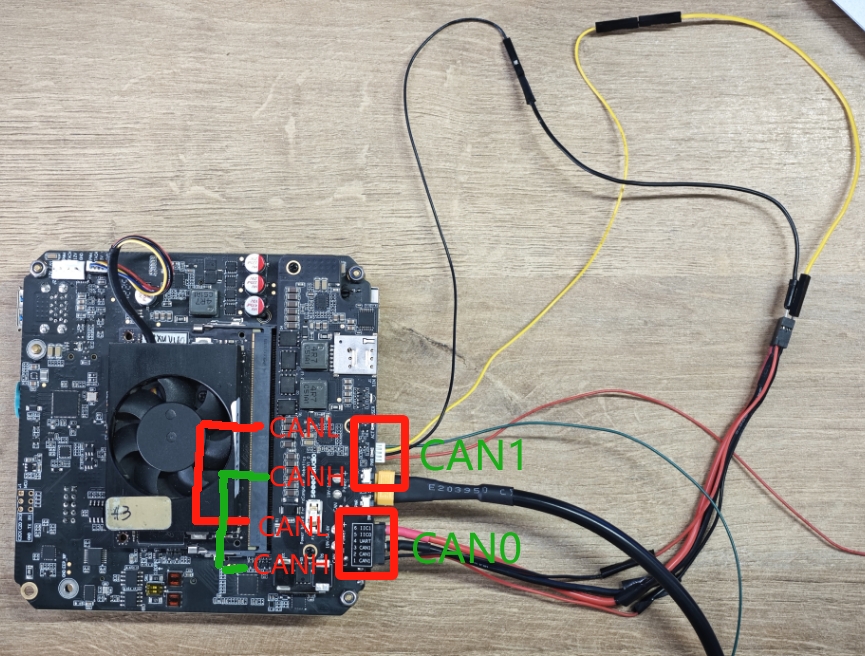
在数据手册中,你可以找到如下所示的 CAN0/CAN1 接口接线图:

这里我们将向你演示如何使用 CAN1 接口进行数据通信,并使用 USB to CAN Analyzer Adapter。
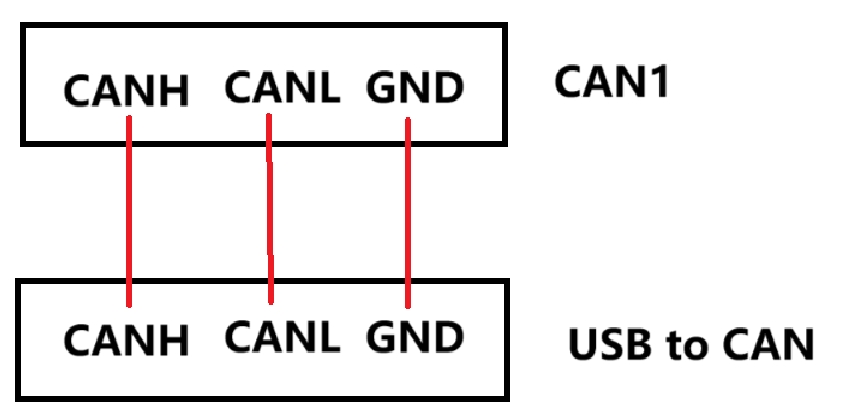
硬件连接
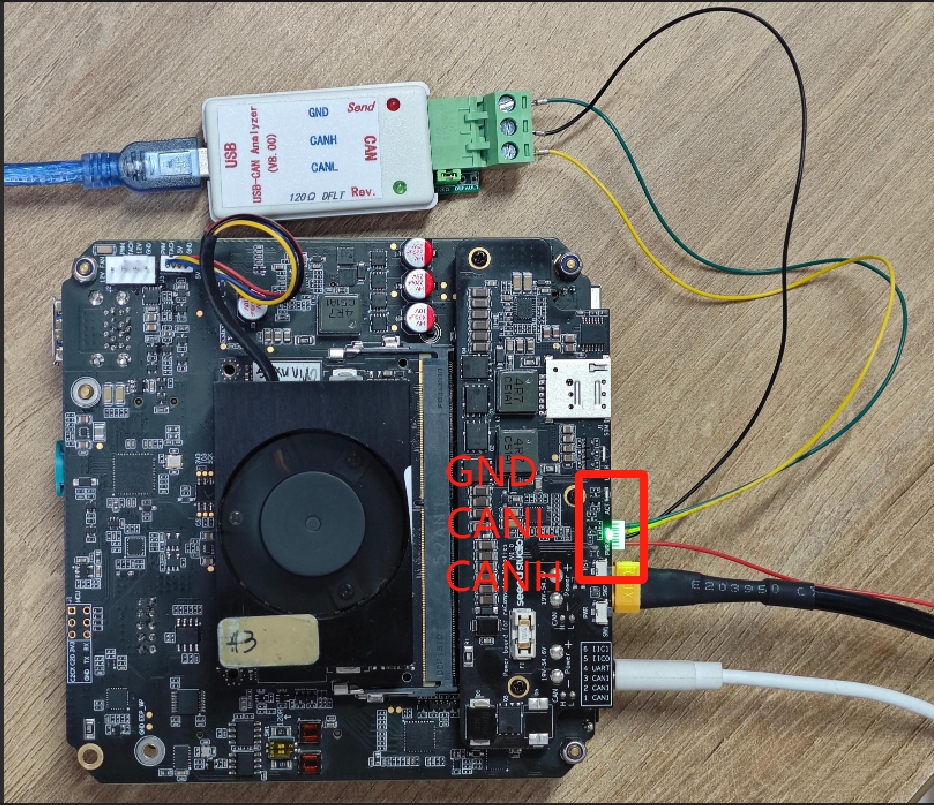
根据下图所示的连接方式,将 CAN1 的 CANL、CANH 和 GND 分别连接到 USB to CAN 工具对应的 CANL、CANH 和 GND 端口。
在我们的示例中,根据所使用的适配器,我们已经下载并安装了可在这里找到的软件。
步骤 1. 配置 CAN1 接口:
#Set the bit rate
sudo ip link set can1 type can bitrate 500000
#Enable CAN1
sudo ip link set can1 up
步骤 2. 配置 PC 端数据接收软件。 请按照下图所示配置通信设置。
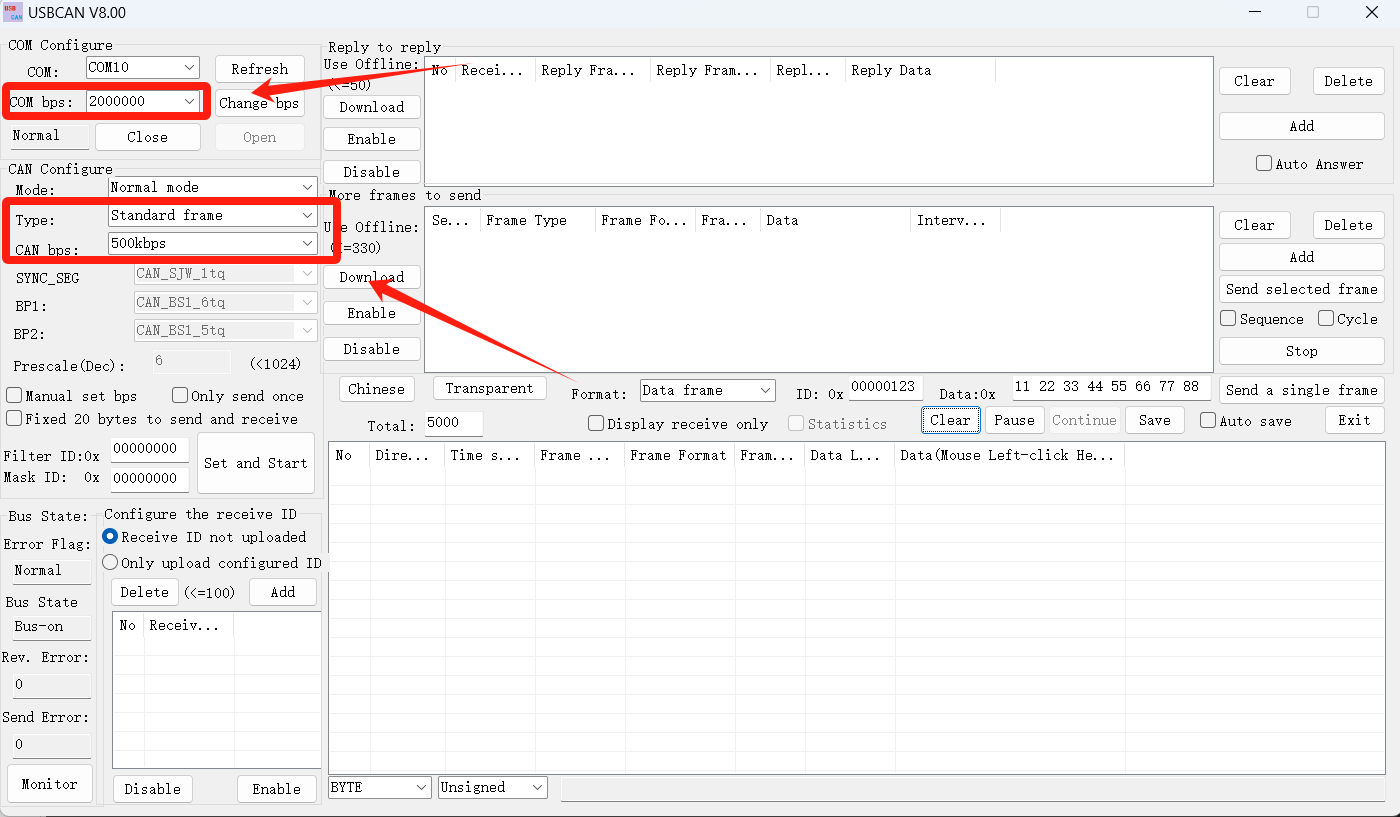
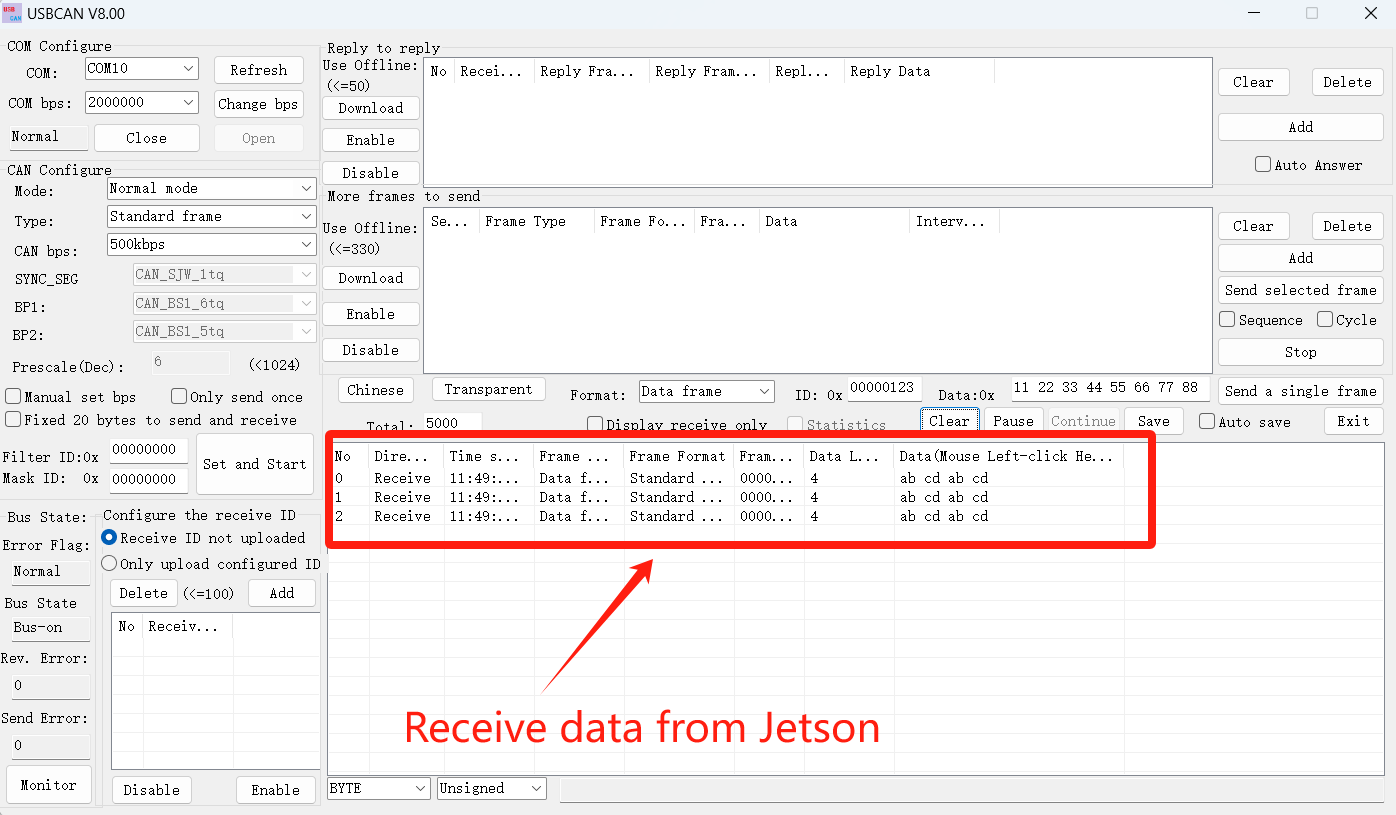
步骤 3. Jetson 向 PC 发送数据:
cansend can1 123#abcdabcd
步骤 3. PC 向 Jetson 发送数据:
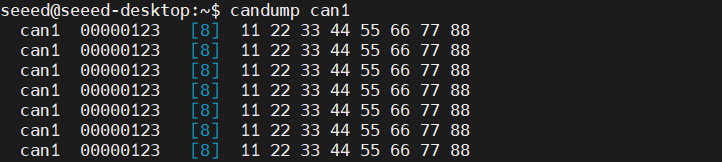
#CAN1 monitors PC data
candump can1
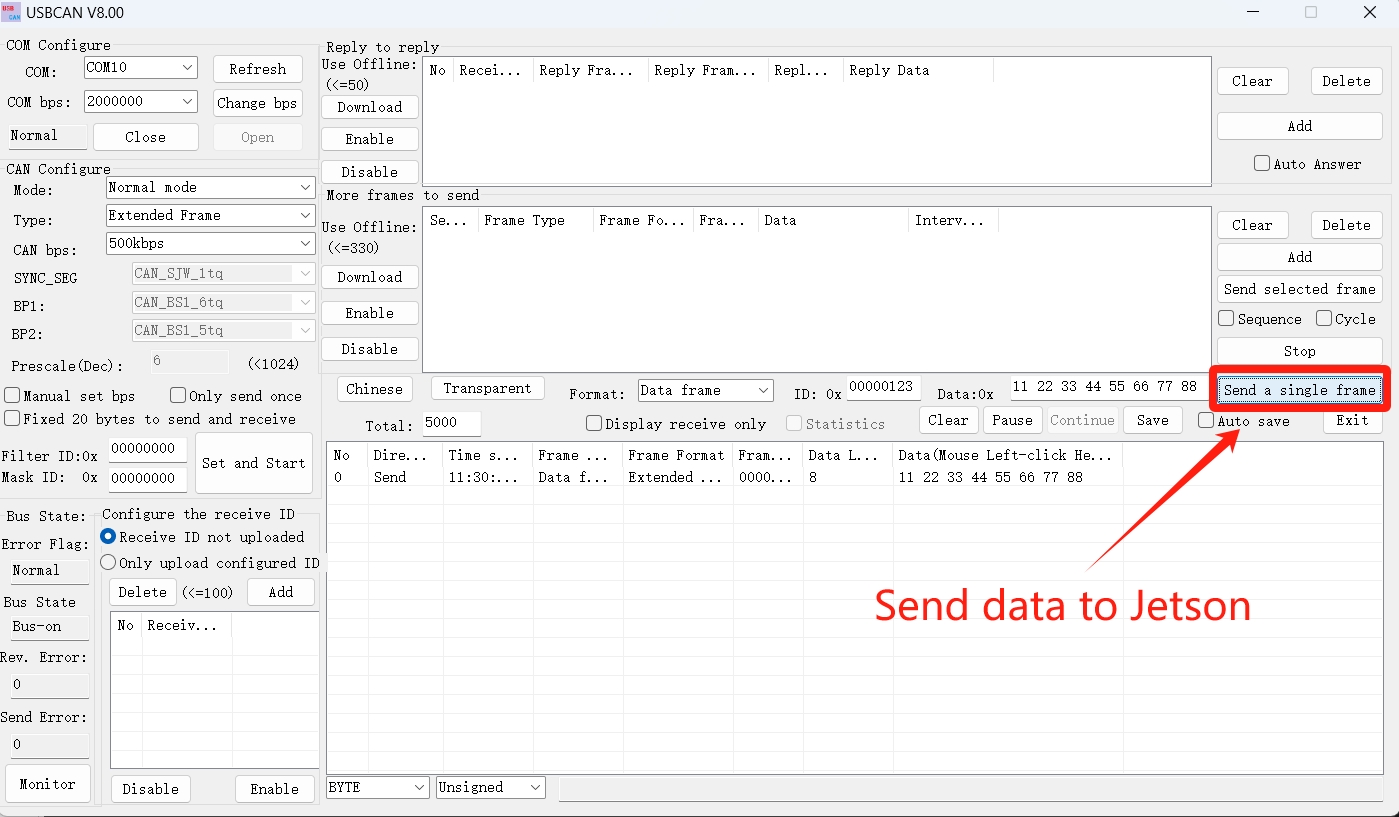
可以看到,Jetson 终端已经接收到 PC 发送的数据。
CAN FD 模式
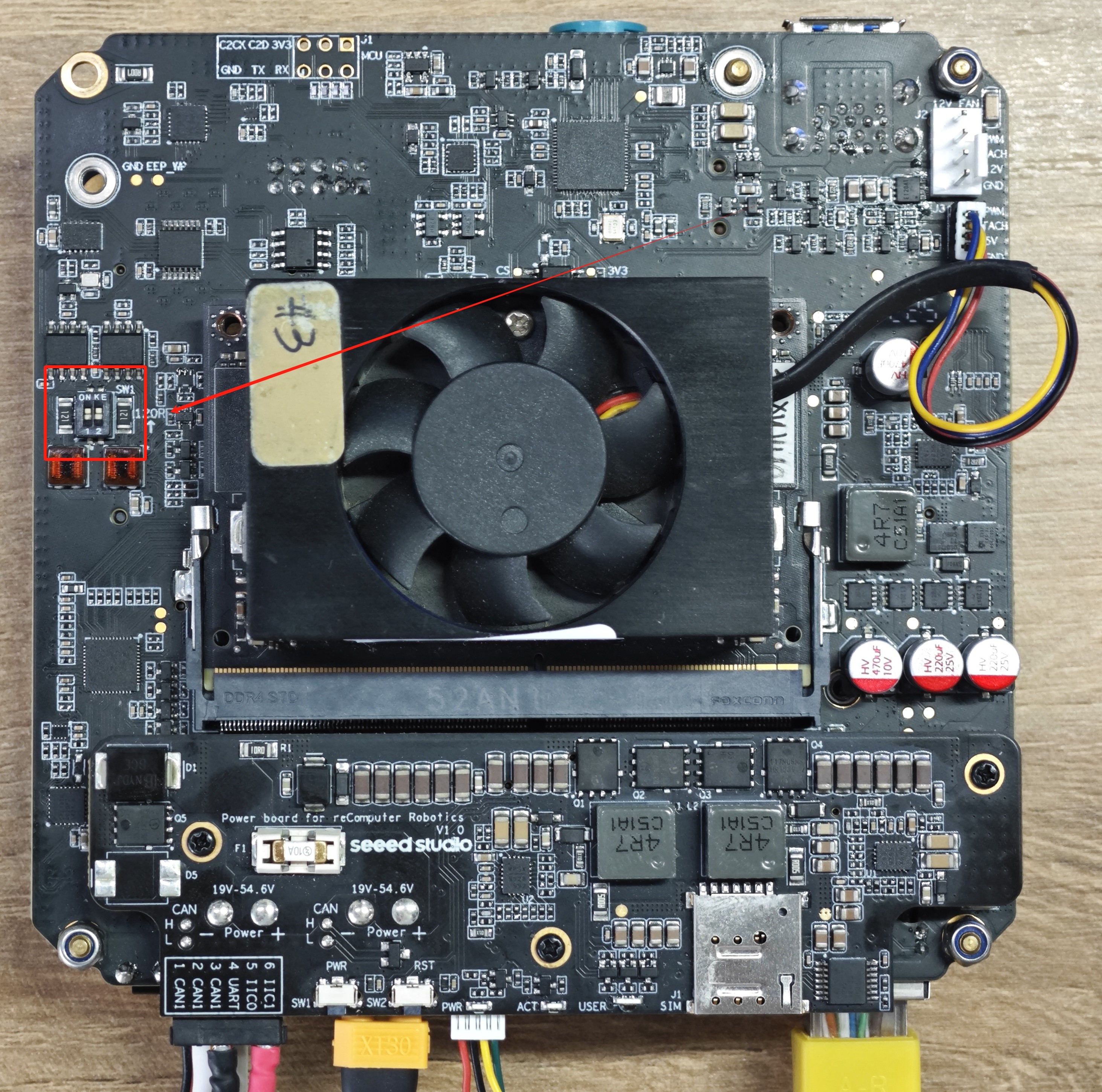
这里,我使用 CAN0 连接到 CAN1,演示多台 Jetson 设备如何通过 CAN 接口进行通信。
硬件连接
步骤 1. 拆下底盖,并将两个 120Ω 终端电阻设置为 ON 位置。
步骤 2. 配置 CAN0 和 CAN1 接口:
#close the interface
sudo ip link set can0 down
sudo ip link set can1 down
#Set to FD mode
sudo ip link set can0 type can bitrate 500000 dbitrate 2000000 fd on
sudo ip link set can1 type can bitrate 500000 dbitrate 2000000 fd on
#open the interface
sudo ip link set can0 up
sudo ip link set can1 up
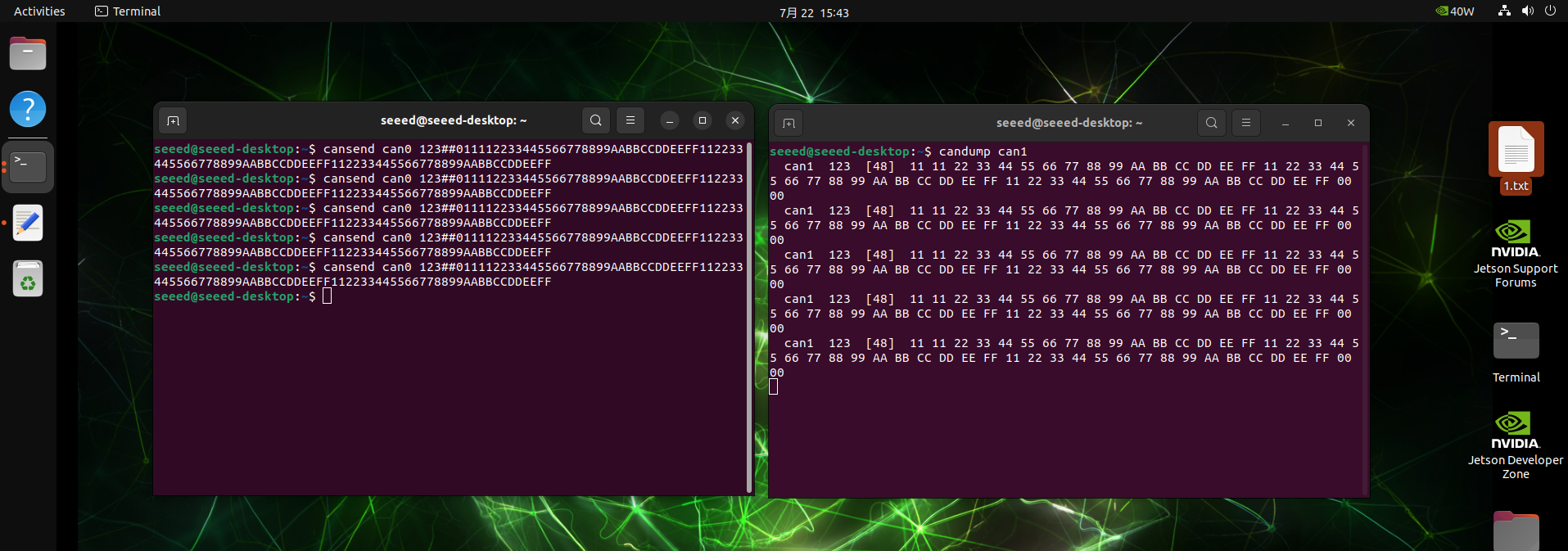
步骤 3. 打开一个新的终端监听 CAN1,并通过 CAN0 向 CAN1 发送数据:
#open a new terminal and run
candump can1
#another terminal sends data
cansend can0 123##011112233445566778899AABBCCDDEEFF112233445566778899AABBCCDDEEFF112233445566778899AABBCCDDEEFF
123是 ID##表示 CAN FD 帧- 后面是 64 字节数据(共 128 个十六进制字符)
UART
Robotics J401 提供了一个标准的 4-pin JST 接口用于 UART 串行通信。
硬件连接
对于 UART 通信,请按照以下接线方式进行。这里我们以 USB to TTL 工具为例。

使用说明
步骤 1. 在 Jetson 设备上打开终端并运行以下命令以启用 UART 接口:
gpioset --mode=time --sec=100 2 5=0
步骤 2. 将 USB to TTL 工具连接到 Robotics J401 的 UART 接口和 PC。
步骤 3. 在 PC 端打开串口工具(这里以 xcom 工具为例),并将波特率设置为 115200。
步骤 4. 创建一个简单的 Python 脚本用于串行通信:
import serial
import time
ser = serial.Serial('/dev/ttyTHS1', 115200, timeout=1)
ser.write(b'Hello Jetson!\n')
while True:
if ser.in_waiting:
data = ser.readline()
print("get:", data.decode('utf-8').strip())
time.sleep(0.1)
ser.close()
步骤 5. 在 Jetson 设备上运行 Python 脚本:
python3 uart_test.py
步骤 6. 现在你可以在 PC 端看到输出,也可以从 PC 向 Jetson 设备发送数据:


I2C
Robotics J401 通过标准 JST 4 针排针提供两个 I2C 接口(IIC0 和 IIC1)。 可轻松连接传感器和外设以扩展系统。
硬件连接
Robotics J401 具有两个 4 针 GH-1.25 IIC 接口,IIC0 和 IIC1。
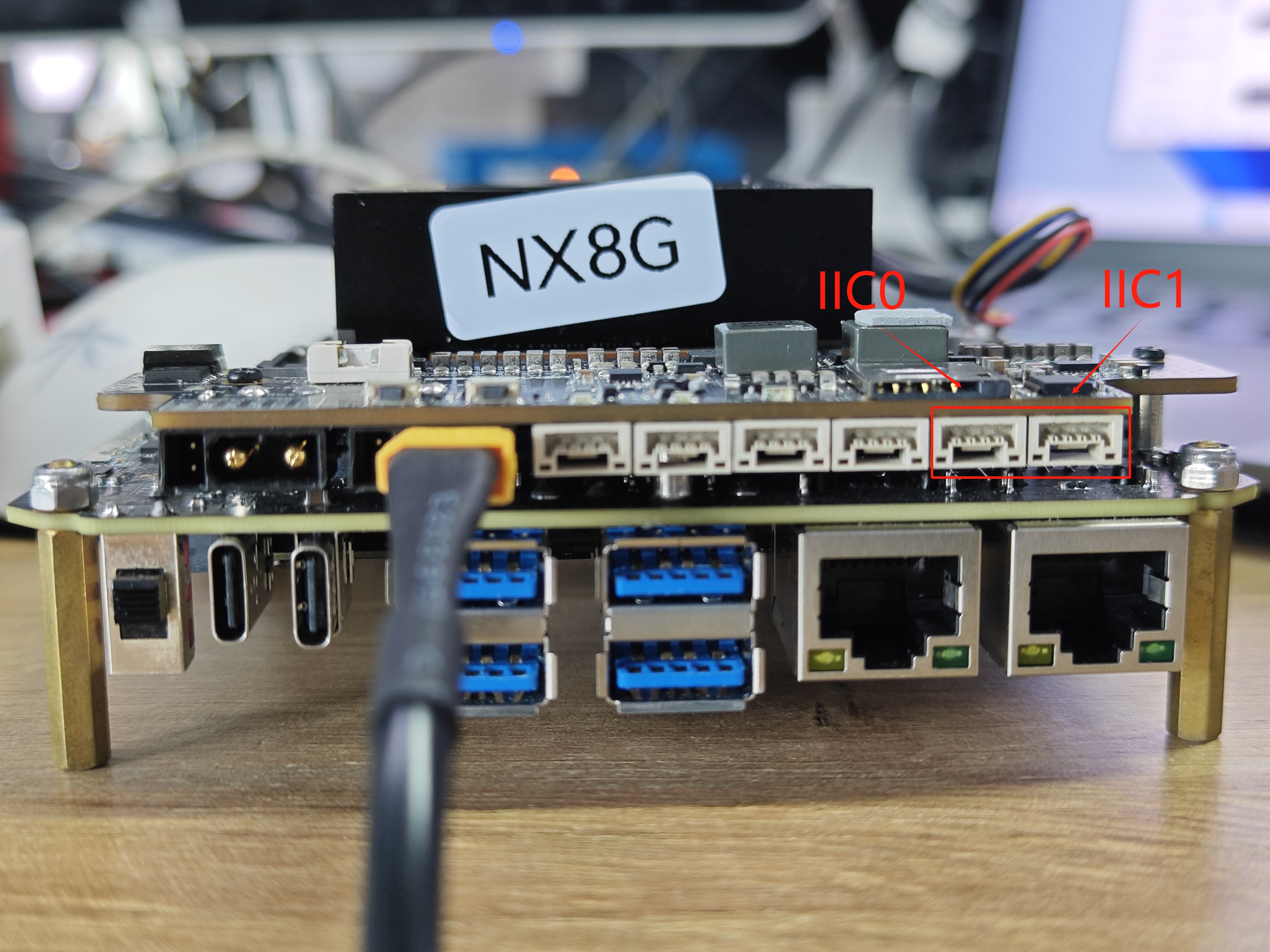
在 datasheet 中,你可以找到如下所示的 IIC0/IIC1 4 针 GH-1.25 接口接线图:

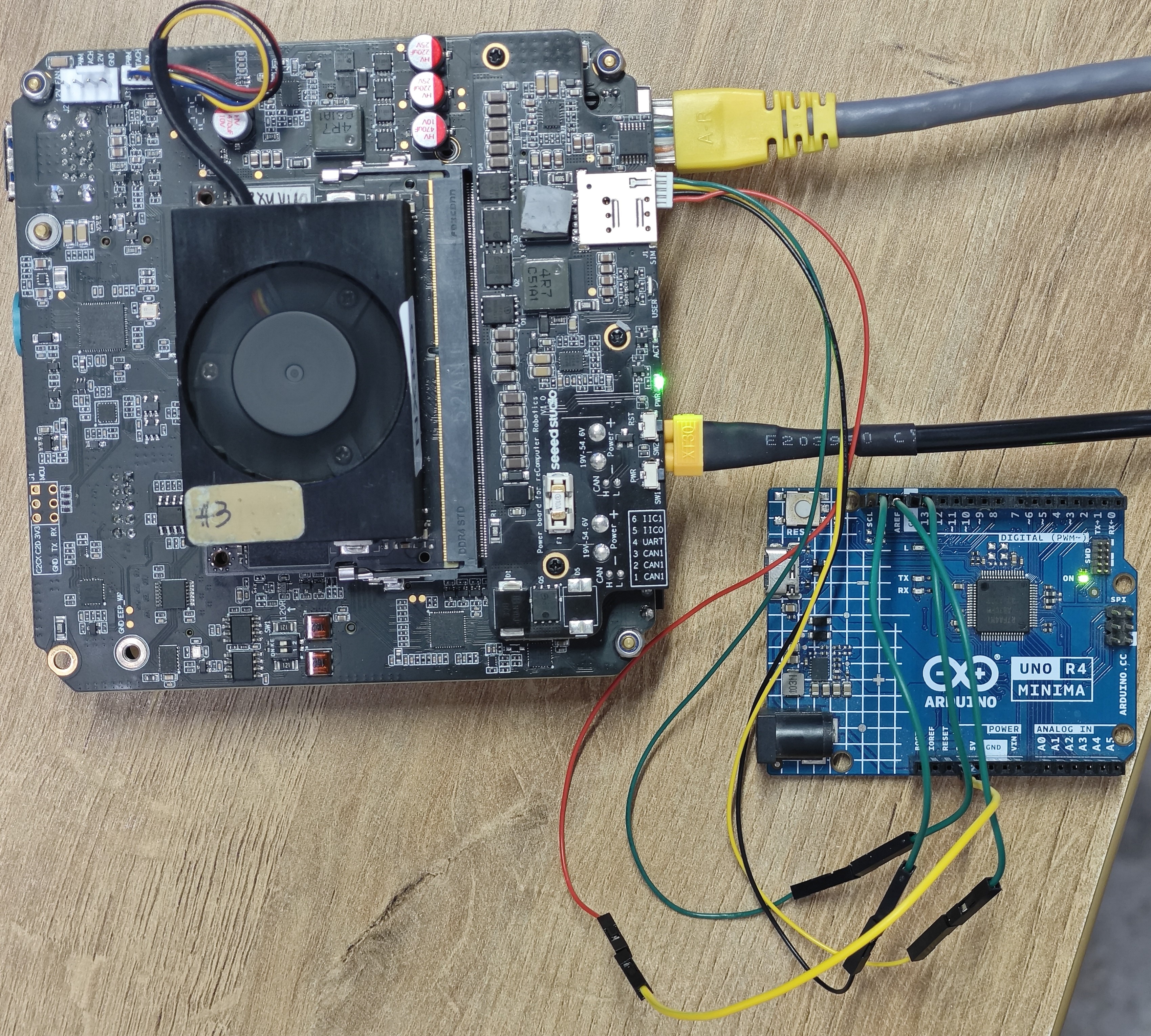
选择一个 IIC 接口设备进行测试,具体选择由你决定。这里我们使用 Arduino-Uno-Rev4-Minima 来测试 I2C0/I2C1。
此处的测试过程包括扫描 IIC0/IIC1 上外部连接设备的地址。
请按照以下连接方式连接设备(IIC0/IIC1 ↔ Device):
-
Power → Power
-
SDA → SDA
-
SCL → SCL
-
Ground → Ground
使用说明
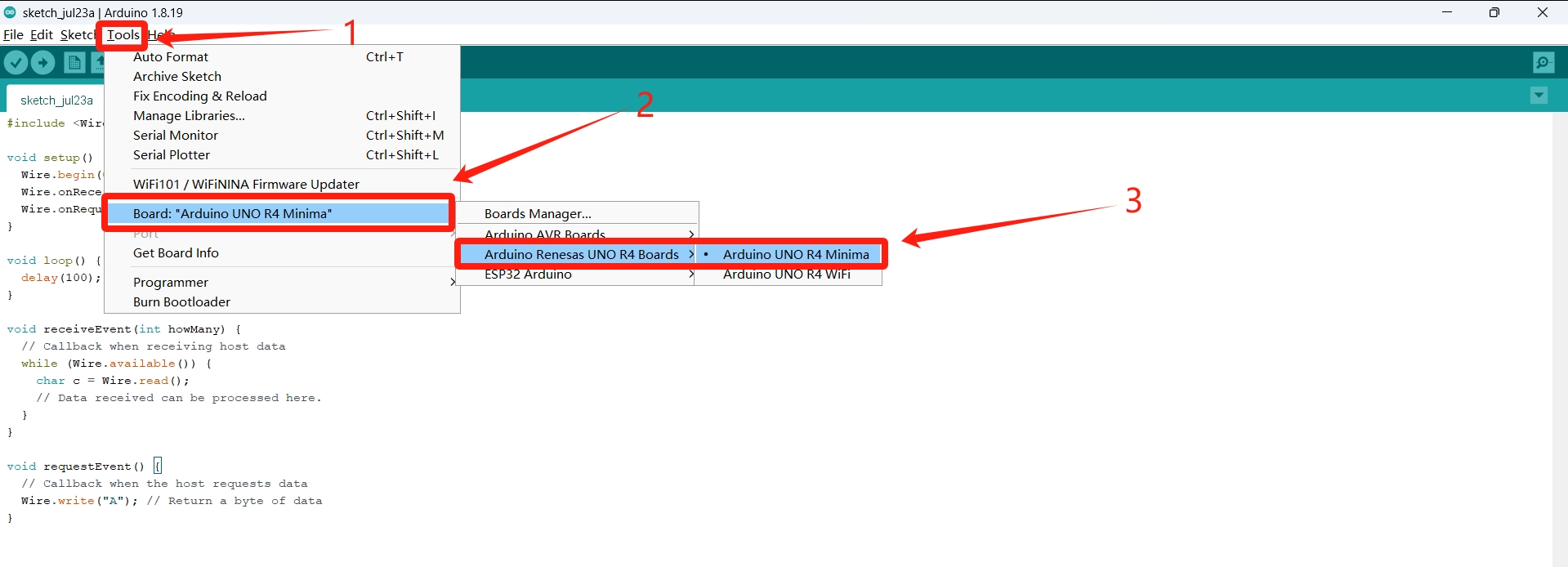
步骤 1. 下载 Arduino IDE 来上传代码。
步骤 2. 选择开发板的类型。
步骤 3. 重启 IDE 并上传你的代码。
#code example
#include <Wire.h>
void setup() {
Wire.begin(0x08); // Set the I2C slave address to 0x08
Wire.onReceive(receiveEvent);
Wire.onRequest(requestEvent);
}
void loop() {
delay(100);
}
void receiveEvent(int howMany) {
// Callback when receiving host data
while (Wire.available()) {
char c = Wire.read();
// Data received can be processed here.
}
}
void requestEvent() {
// Callback when the host requests data
Wire.write("A"); // Return a byte of data
}
步骤 4. 在 Jetson 上安装用于 IIC 测试的工具。
sudo apt update
sudo apt-get install i2c-tools
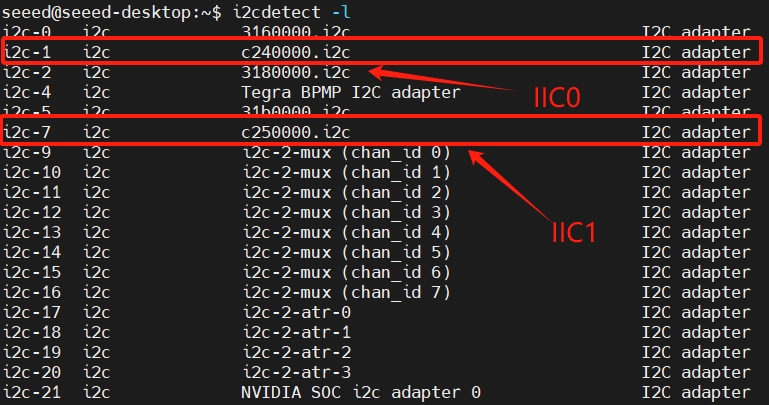
步骤 5. 在终端中运行以下命令以查看 IIC 总线上映射的名称:
i2cdetect -l
步骤 6. 运行以下命令在 IIC0 上进行扫描:
sudo i2cdetect -y -r 1
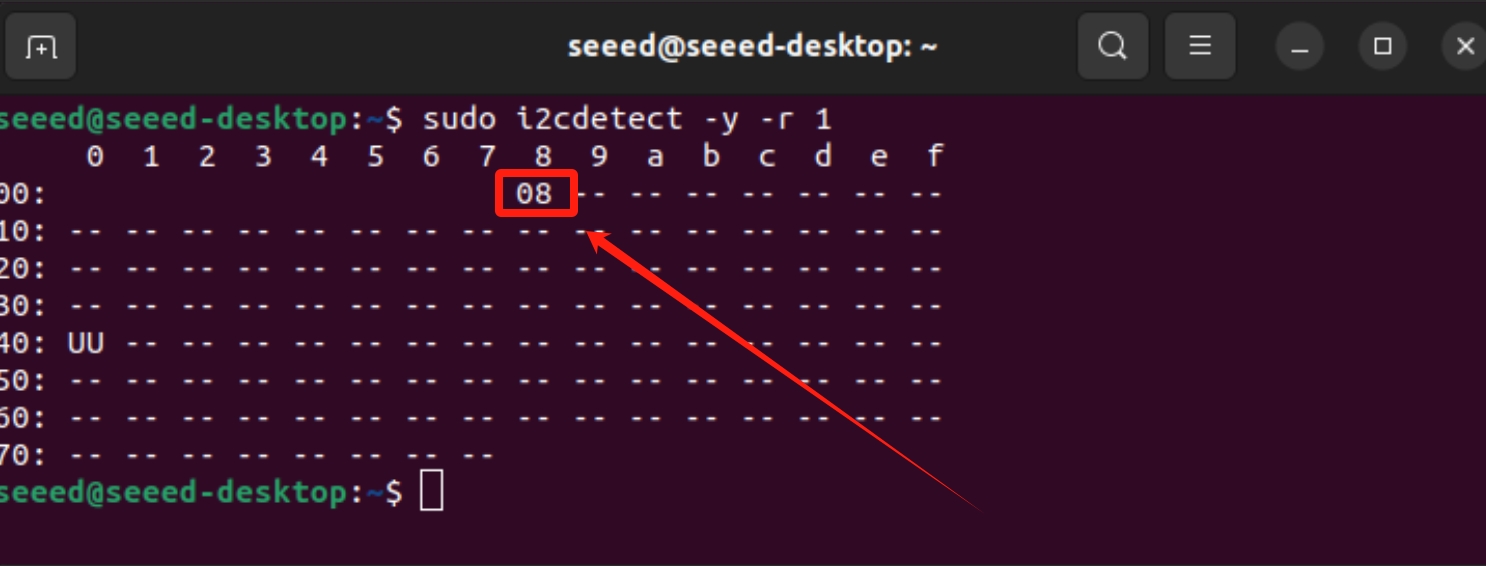
我们可以看到连接到 IIC0 的设备被设置为地址 0x08。
扩展端口
Robotics j401 载板配备了用于 GMSL 扩展板的 Camera Expansion Header。它可以同时连接并运行四个 GMSL 摄像头。
硬件连接
下面是 Robotics j401 载板 GMSL 摄像头扩展板连接插槽(需要提前准备扩展板):

以下是我们已经支持的 GMSL 摄像头型号:
- SG3S-ISX031C-GMSL2F
- SG2-AR0233C-5200-G2A
- SG2-IMX390C-5200-G2A
- SG8S-AR0820C-5300-G2A
- Orbbec Gemini 335Lg
使用说明
在启用 GMSL 功能之前,请确保你已经安装了带有 GMSL 扩展板驱动的 JetPack 版本。
配置 Jetson IO 文件
sudo /opt/nvidia/jetson-io/jetson-io.py
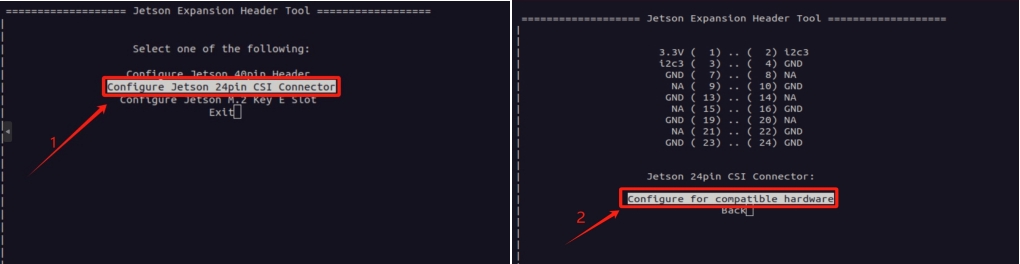
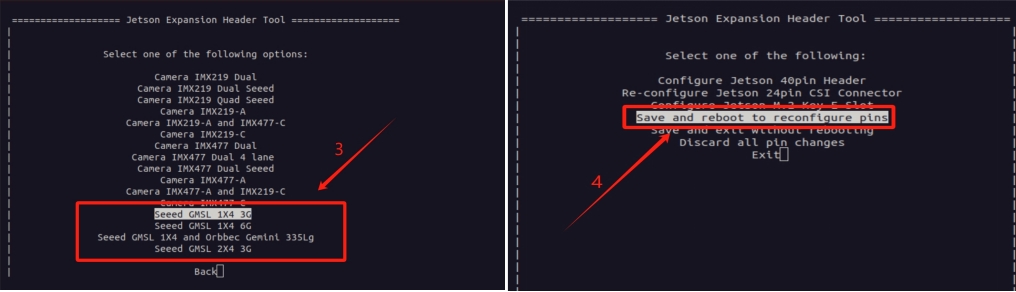
一共有三个 overlay 文件,分别是 Seeed GMSL 1X4 3G、Seeed GMSL 1X4 6G、Seeed GMSL 1X4 和 Orbbec Gemini 335Lg。它们分别对应 SG3S 的 3G 摄像头、SG2 和 SG8S 的 6G 摄像头,以及 Orbbec 的摄像头。如图 3 所示,请根据你的摄像头型号配置 io 文件。
步骤 2. 安装视频接口配置工具。
sudo apt update
sudo apt install v4l-utils
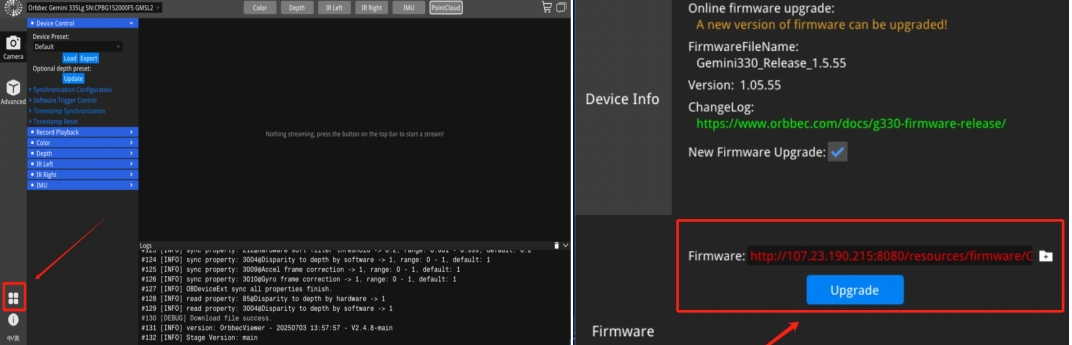
使用 Gemini 335Lg 摄像头
#Download the Orbbec Gemini 335Lg visualization tool
wget https://github.com/orbbec/OrbbecSDK_v2/releases/download/v2.4.8/OrbbecViewer_v2.4.8_202507031357_a1355db_linux_aarch64.zip
#unzip and run the UI tool
unzip OrbbecViewer_v2.4.8_202507031357_a1355db_linux_aarch64.zip
cd OrbbecViewer_v2.4.8_202507031357_a1355db_linux_aarch64
./OrbbecViewer
第一次开启时,你可能需要更新固件。
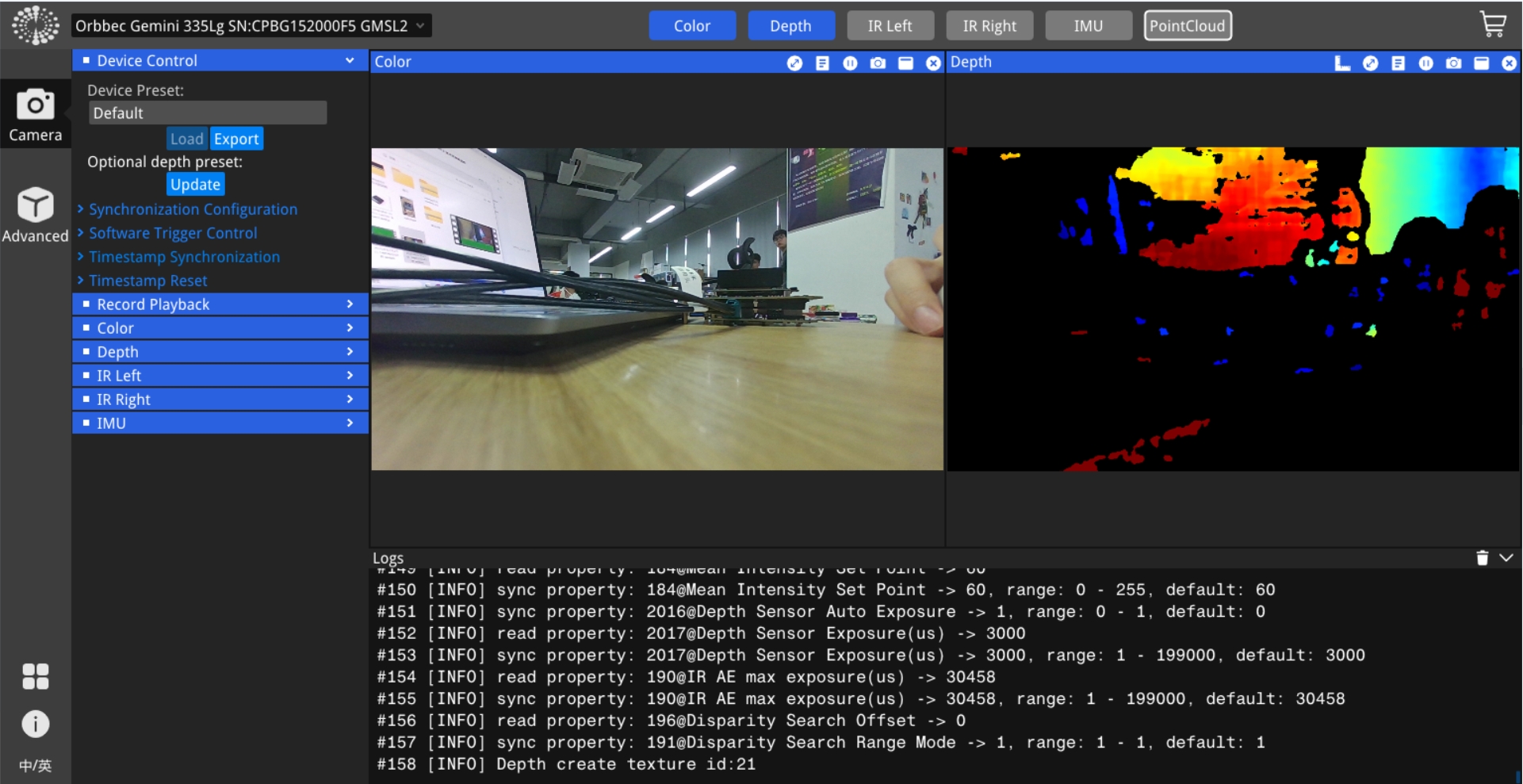
打开数据流后,你可以查看来自摄像头的视频。
使用 SGxxx 系列摄像头
步骤 1. 设置帧同步模式(默认未启用!)。
这里我们演示如何配置不同型号和分辨率的摄像头。
#enables frame synchronization
v4l2-ctl -d /dev/video0 --set-ctrl=trig_mode=1
#Set the frame rate of the camera
v4l2-ctl -V --set-fmt-video=width=1920,height=1536 -c sensor_mode=0 --stream-mmap -d /dev/video0
#Set the camera format
v4l2-ctl -V --set-fmt-video=width=1920,height=1536 -c sensor_mode=0 -d /dev/video0
trig_mode = 1 启用帧同步,而 trig_mode = 0 禁用帧同步。默认设置为禁用帧同步。
--set-fmt-video 后面跟随的分辨率是根据所连接摄像头选择的。目前有三个 sensor_mode 选项,每个选项对应一种不同的分辨率。
- sensor_mode=0 -------> YUYV8_1X16/1920x1536
- sensor_mode=1 -------> YUYV8_1X16/1920x1080
- sensor_mode=2 -------> YUYV8_1X16/3840x2160
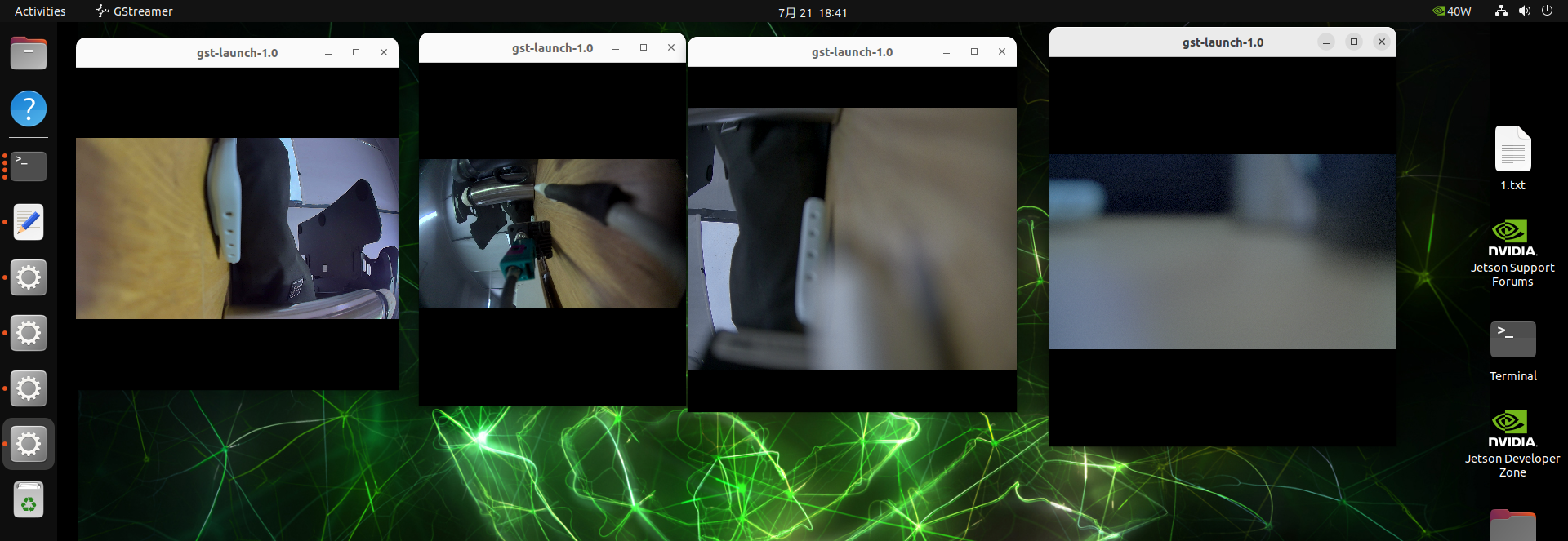
步骤 2. 启动摄像头。
gst-launch-1.0 \
v4l2src device=/dev/video0 ! \
video/x-raw,format=YUY2,width=1920,height=1080,framerate=30/1 ! \
videoconvert ! \
videoscale ! \
xvimagesink
gst-launch-1.0 \
v4l2src device=/dev/video1 ! \
video/x-raw,format=YUY2,width=1920,height=1080,framerate=30/1 ! \
videoconvert ! \
videoscale ! \
xvimagesink
gst-launch-1.0 \
v4l2src device=/dev/video2 ! \
video/x-raw,format=YUY2,width=1536,height=1080,framerate=30/1 ! \
videoconvert ! \
videoscale ! \
xvimagesink
gst-launch-1.0 \
v4l2src device=/dev/video3 ! \
video/x-raw,format=YUY2,width=3840,height=2160,framerate=30/1 ! \
videoconvert ! \
videoscale ! \
xvimagesink
显示
reComputer Jetson Robotics J401 配备了一个 DP1.4(包含在 Type-C Host 中),用于高分辨率显示输出。
资源
- reComputer Robotics J401 载板原理图
- reComputer Robotics J401 载板数据手册
- reComputer Robotics 3D 文件
- Mechanical Document-reComputer Robotics PCBA
- Seeed NVIDIA Jetson 产品目录
- Nvidia Jetson 对比
- Seeed Nvidia Jetson 成功案例
- Seeed Jetson 一页纸简介
技术支持与产品讨论
感谢你选择我们的产品!我们为你提供多种支持方式,以确保你在使用我们产品时体验顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。