使用 reSpeaker 为你的 LeKiwi 机器人添加语音交互
概述
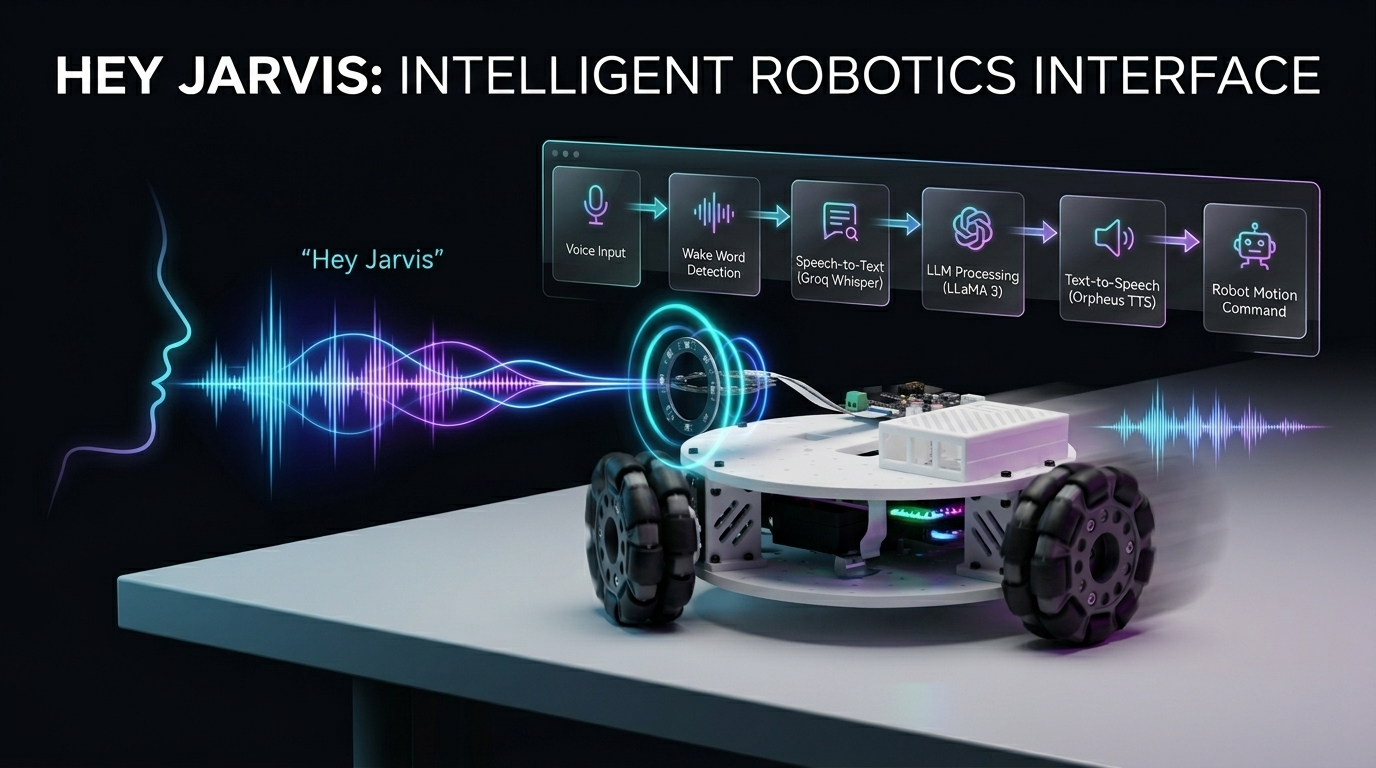
用你的声音控制一台三轮 Kiwi 驱动机器人!本项目将 Seeed Studio XIAO ESP32(电机控制器)与 Raspberry Pi(语音处理大脑)结合,并通过 reSpeaker 提供高质量音频采集,再配合语音嵌入,实现更智能、更个性化的语音交互。借助自然语言指令,你可以完全免手动地驱动、转向和控制机器人,同时获得更高的准确性和响应速度。
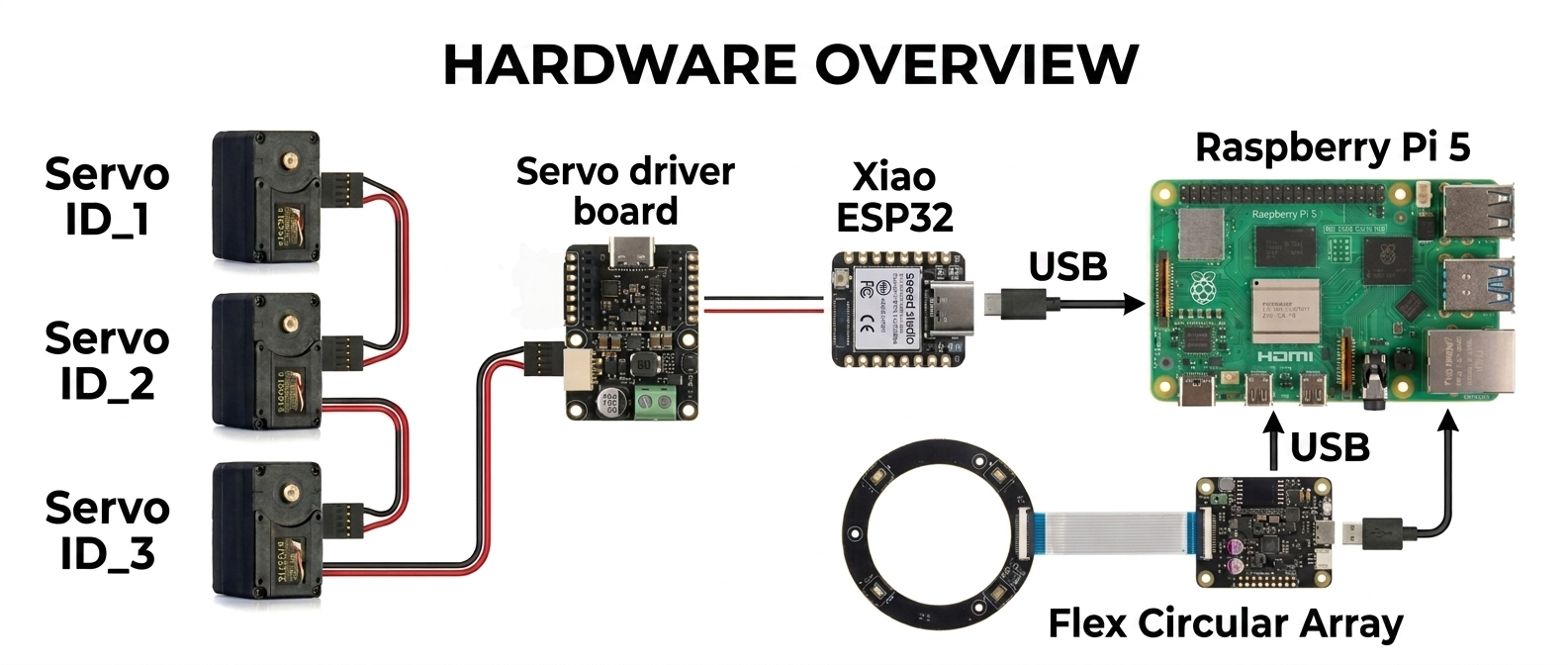
所需硬件
| LeKiwi 套件 | XIAO ESP32S3 | Raspberry Pi 5 |
|---|---|---|
 |  |  |


服务
- Groq 账号:免费层就足以开始使用
工作原理
You speak → Wake word detected → Audio recorded → Whisper STT → LLaMA LLM → Orpheus TTS speaks back → ESP32 moves the robot
- 你说出唤醒词(默认:"Hey Jarvis")
- Raspberry Pi 录制你的指令
- Groq Whisper 将你的语音转写为文本
- LLaMA 3 决定机器人应执行的动作
- Groq Orpheus TTS 将回复语音播报出来
- 通过串口向 ESP32 发送指令,由其驱动电机
准备 XIAO ESP32(电机控制器)
ESP32 运行 Arduino 草图,用 Kiwi 驱动运动学 实际驱动三个轮子。它从 Raspberry Pi 接收单字符串口指令(w、s、a、d 等),并将其转换为协调一致的电机转速。
步骤 1 — 设置电机 ID
该草图预期舵机 ID 为 1、2、3。在组装机器人之前,请将每个舵机单独连接,并使用 Feetech 配置工具分配正确的 ID。
步骤 2 — 组装 LeKiwi
按照 Seeed Studio 官方视频教程组装底盘、安装车轮并连接舵机:
你只需要完成物理组装,可以跳过所有关于克隆 LeRobot GitHub 仓库的步骤,因为本项目使用的是不同的设置。
步骤 3 — 上传 Arduino 草图
该草图(lekiwi_motor_control.ino)完成以下工作:
- 将三个舵机全部初始化为位置模式,将其居中,然后切换到轮式(连续旋转)模式
- 在 USB 串口上监听单字符指令
- 使用 Kiwi 驱动运动学 计算每个轮子的正确速度
- 仅支持点动模式(短暂脉冲,然后自动停止) 串口指令参考:
| 按键 | 动作 |
|---|---|
w | 向前点动 |
s | 向后点动 |
a | 左转点动 |
d | 右转点动 |
q | 左平移点动 |
e | 右平移点动 |
x / 空格 | 紧急停止 |
+ / - | 增加 / 减少点动时长 |
* / / | 增加 / 减少点动速度 |
在安装好 SCServo 库的 Arduino IDE 中上传该草图。打开串口监视器并设置为 115200 波特率,确认三个舵机都返回 OK。
Arduino 代码
#include <SCServo.h>
#include <math.h>
// Serial port selection
#if defined(CONFIG_IDF_TARGET_ESP32C3) || \
defined(CONFIG_IDF_TARGET_ESP32C6) || \
defined(CONFIG_IDF_TARGET_ESP32S3)
#define COMSerial Serial0
#else
#define COMSerial Serial1
#endif
#define S_RXD D7
#define S_TXD D6
SMS_STS st;
#define SERVO_NUM 3
byte ID[SERVO_NUM] = {1, 2, 3};
// Kiwi drive wheel angles (90°, 210°, 330°)
const float WHEEL_ANGLE_DEG[SERVO_NUM] = {90.0f, 210.0f, 330.0f};
// Base speed (0-3000 for STS3215 in wheel mode)
int BASE_SPEED = 1000;
// Nudge parameters
int NUDGE_DURATION = 1500; // milliseconds to move
int NUDGE_SPEED = 800; // speed during nudge
#define REG_OPERATING_MODE 33
void enableWheelMode(byte servoID) {
// Unlock EEPROM
st.unLockEprom(servoID);
delay(10);
// Set wheel mode (value 1 for continuous rotation mode)
st.writeByte(servoID, REG_OPERATING_MODE, 1);
delay(10);
// Lock EEPROM
st.LockEprom(servoID);
delay(10);
// IMPORTANT: Enable torque after mode change
st.EnableTorque(servoID, 1);
delay(10);
Serial.print("Servo "); Serial.print(servoID);
Serial.println(" configured for wheel mode with torque enabled");
}
void setWheelSpeeds(float vx, float vy, float omega) {
for (int i = 0; i < SERVO_NUM; i++) {
float rad = WHEEL_ANGLE_DEG[i] * (PI / 180.0f);
// Kiwi kinematics formula
float speed = -sin(rad) * vx + cos(rad) * vy + omega;
// Scale to servo speed range (-3000 to +3000)
int spdInt = (int)(speed * BASE_SPEED);
// Clamp to valid range
if (spdInt > 3000) spdInt = 3000;
if (spdInt < -3000) spdInt = -3000;
// WriteSpe expects (id, speed) - only 2 parameters!
st.WriteSpe(ID[i], spdInt);
}
}
void nudgeRobot(float vx, float vy, float omega) {
// Calculate temporary speeds using nudge speed instead of base speed
int originalBaseSpeed = BASE_SPEED;
BASE_SPEED = NUDGE_SPEED;
// Apply movement
setWheelSpeeds(vx, vy, omega);
// Wait for nudge duration
delay(NUDGE_DURATION);
// Stop all motors
stopAll();
// Restore original base speed
BASE_SPEED = originalBaseSpeed;
}
void stopAll() {
for (int i = 0; i < SERVO_NUM; i++) {
st.WriteSpe(ID[i], 0);
}
Serial.println("Motors stopped");
}
void initializeServosToPositionMode() {
Serial.println(F("Setting servos to position mode for initial positioning..."));
for (int i = 0; i < SERVO_NUM; i++) {
// Unlock EEPROM
st.unLockEprom(ID[i]);
delay(10);
// Set position mode (value 0)
st.writeByte(ID[i], REG_OPERATING_MODE, 0);
delay(10);
// Lock EEPROM
st.LockEprom(ID[i]);
delay(10);
// Enable torque
st.EnableTorque(ID[i], 1);
delay(10);
}
delay(500);
Serial.println(F("Moving all servos to center position (2048)..."));
// Move all servos to center position
u16 Speed[SERVO_NUM] = {1500, 1500, 1500};
byte ACC[SERVO_NUM] = {50, 50, 50};
s16 Pos[SERVO_NUM] = {2048, 2048, 2048};
st.SyncWritePosEx(ID, SERVO_NUM, Pos, Speed, ACC);
delay(2000); // Wait for movement to complete
Serial.println(F("Servos positioned. Switching to wheel mode..."));
// Now switch to wheel mode
for (int i = 0; i < SERVO_NUM; i++) {
enableWheelMode(ID[i]);
delay(50);
}
}
void printHelp() {
Serial.println(F("\n====== LeKiwi Nudge Control ======"));
Serial.println(F("Each key press gives a short 'nudge' movement"));
Serial.println(F(" w = Forward nudge"));
Serial.println(F(" s = Backward nudge"));
Serial.println(F(" a = Turn LEFT nudge"));
Serial.println(F(" d = Turn RIGHT nudge"));
Serial.println(F(" q = Strafe LEFT nudge"));
Serial.println(F(" e = Strafe RIGHT nudge"));
Serial.println(F(" x = STOP (emergency)"));
Serial.println(F(""));
Serial.println(F("Continuous movement mode:"));
Serial.println(F(" SHIFT + key = Continuous movement"));
Serial.println(F(" Example: Press 'W' (uppercase) = continuous forward"));
Serial.println(F(""));
Serial.println(F("Settings:"));
Serial.println(F(" + = Increase nudge duration"));
Serial.println(F(" - = Decrease nudge duration"));
Serial.println(F(" * = Increase nudge speed"));
Serial.println(F(" / = Decrease nudge speed"));
Serial.println(F(" ? = Show this help"));
Serial.println(F(""));
Serial.print(F("Current nudge duration: "));
Serial.print(NUDGE_DURATION);
Serial.println(F(" ms"));
Serial.print(F("Current nudge speed: "));
Serial.println(NUDGE_SPEED);
Serial.println(F("==================================="));
}
void setup() {
Serial.begin(115200);
delay(1500);
Serial.println(F("LeKiwi Nudge Control boot..."));
// Start servo bus with explicit pins
COMSerial.begin(1000000, SERIAL_8N1, S_RXD, S_TXD);
st.pSerial = &COMSerial;
delay(500);
Serial.println(F("Checking servos..."));
bool allServosFound = true;
for (int i = 0; i < SERVO_NUM; i++) {
if (st.Ping(ID[i]) != -1) {
Serial.print(F("Servo "));
Serial.print(ID[i]);
Serial.println(F(" OK"));
} else {
Serial.print(F("ERROR: Servo "));
Serial.print(ID[i]);
Serial.println(F(" not found!"));
allServosFound = false;
}
delay(100);
}
if (!allServosFound) {
Serial.println(F("Some servos not found. Check connections and power!"));
while(1) { delay(1000); } // Halt if servos not found
}
// Initialize servos to center position, then switch to wheel mode
initializeServosToPositionMode();
Serial.println(F("\nSystem ready! Press keys for nudge movement."));
Serial.println(F("(Each key press moves the robot a short distance)\n"));
printHelp();
}
void loop() {
if (!Serial.available()) return;
char cmd = (char)Serial.read();
bool isShifted = false;
// Check for uppercase (SHIFT key in terminal)
if (cmd >= 'A' && cmd <= 'Z') {
isShifted = true;
}
// Flush any trailing characters
while (Serial.available() && (Serial.peek() == '\n' || Serial.peek() == '\r')) {
Serial.read();
}
// Process movement commands
switch (cmd) {
case 'w':
if (isShifted) {
setWheelSpeeds(0, 1, 0);
Serial.println(F("Continuous Forward"));
} else {
Serial.println(F("Nudge Forward"));
nudgeRobot(0, 1, 0);
}
break;
case 's':
if (isShifted) {
setWheelSpeeds(0, -1, 0);
Serial.println(F("Continuous Backward"));
} else {
Serial.println(F("Nudge Backward"));
nudgeRobot(0, -1, 0);
}
break;
case 'q':
if (isShifted) {
setWheelSpeeds(-1, 0, 0);
Serial.println(F("Continuous Strafe Left"));
} else {
Serial.println(F("Nudge Strafe Left"));
nudgeRobot(-1, 0, 0);
}
break;
case 'e':
if (isShifted) {
setWheelSpeeds(1, 0, 0);
Serial.println(F("Continuous Strafe Right"));
} else {
Serial.println(F("Nudge Strafe Right"));
nudgeRobot(1, 0, 0);
}
break;
case 'a':
if (isShifted) {
setWheelSpeeds(0, 0, 1);
Serial.println(F("Continuous Turn Left"));
} else {
Serial.println(F("Nudge Turn Left"));
nudgeRobot(0, 0, 1);
}
break;
case 'd':
if (isShifted) {
setWheelSpeeds(0, 0, -1);
Serial.println(F("Continuous Turn Right"));
} else {
Serial.println(F("Nudge Turn Right"));
nudgeRobot(0, 0, -1);
}
break;
case 'x': case 'X': case ' ':
stopAll();
Serial.println(F("Emergency Stop"));
break;
case '+':
NUDGE_DURATION = min(NUDGE_DURATION + 50, 1000);
Serial.print(F("Nudge duration: "));
Serial.print(NUDGE_DURATION);
Serial.println(F(" ms"));
break;
case '-':
NUDGE_DURATION = max(NUDGE_DURATION - 50, 50);
Serial.print(F("Nudge duration: "));
Serial.print(NUDGE_DURATION);
Serial.println(F(" ms"));
break;
case '*':
NUDGE_SPEED = min(NUDGE_SPEED + 100, 2000);
Serial.print(F("Nudge speed: "));
Serial.println(NUDGE_SPEED);
break;
case '/':
NUDGE_SPEED = max(NUDGE_SPEED - 100, 200);
Serial.print(F("Nudge speed: "));
Serial.println(NUDGE_SPEED);
break;
case '?':
printHelp();
break;
}
}
准备树莓派(语音大脑)
步骤 1 — 获取 Groq API 密钥
- 在 console.groq.com 注册
- 创建一个新的 API 密钥并复制它 —— 你将在步骤 4 中用到它
步骤 2 — 克隆此仓库
git clone https://github.com/KasunThushara/Lekiwi-voice
cd Lekiwi-voice
步骤 3 — 创建虚拟环境
python3 -m venv venv
source venv/bin/activate
每次在使用此项目之前打开一个新的终端时,都运行
source venv/bin/activate。
步骤 4 — 安装依赖
pip install -r requirements.txt
然后下载唤醒词模型:
python3 download_model.py
这会从 openwakeword 下载预训练的 "Hey Jarvis" 模型(以及其他模型)到 ~/.openwakeword/ 中。
步骤 5 — 查找你的麦克风索引
通过 USB 插入你的 reSpeaker,然后运行:
python3 list_mics.py
你会看到类似这样的列表:
Available audio INPUT devices:
[0] bcm2835 Headphones (rate=44100Hz)
[1] ReSpeaker 4 Mic Array (rate=16000Hz)
[2] USB PnP Sound Device (rate=16000Hz)
记下你的 ReSpeaker 旁边方括号中的数字 —— 这就是你的 MIC_INDEX。
步骤 6 — 查找你的 ESP32 串口
通过 USB 将 XIAO ESP32 插入树莓派,然后运行:
python3 list_ports.py
示例输出:
Available serial ports:
/dev/ttyACM0 USB Serial Device
/dev/ttyUSB0 CP2102 USB to UART Bridge
记下设备路径(对于 XIAO 通常是 /dev/ttyACM0)。
步骤 7 — 配置项目
复制示例配置文件并填入你的参数:
cp config.env.example config.env
nano config.env
需要更新的关键设置:
# Your Groq API key (required)
GROQ_API_KEY=gsk_xxxxxxxxxxxxxxxxxxxxxxxx
# The number from list_mics.py
MIC_INDEX=1
# The port from list_ports.py
SERIAL_PORT=/dev/ttyACM0
其他所有内容可以保持默认设置以便开始使用。
运行机器人
确保你的虚拟环境已激活,然后:
python3 pipeline.py
你应该会看到:
======================================================
LeKiwi Voice Controller — Ready
Wake word : hey jarvis
LLM model : llama-3.1-8b-instant
STT model : whisper-large-v3-turbo
TTS voice : autumn
Serial : /dev/ttyACM0 @ 115200
======================================================
[WakeWord] Listening for 'hey jarvis' ...
现在说 "Hey Jarvis",然后给出一个移动指令!
示例指令
"Hey Jarvis, move forward"
"Hey Jarvis, turn left"
"Hey Jarvis, strafe right"
"Hey Jarvis, stop"
"Hey Jarvis, what can you do?"
技术支持与产品讨论
感谢你选择我们的产品!我们将为你提供多种支持,以确保你在使用我们产品时的体验尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。