在 reSpeaker 上构建 ROS2 语音流水线
介绍

本项目使用 reSpeaker 麦克风阵列和 ROS2,将你的语音转换为 TurtleSim 控制。说出 “Hey Jarvis” 加上一条指令,Jarvis 会录制音频,使用 Groq Whisper 转写,使用 Groq LLaMA 解析意图,并通过 Groq Orpheus TTS 做出语音回应。它支持前进/后退运动、角度转向、基于声源方向(DoA)的朝向调整,以及即时停止指令。系统将唤醒词检测、音频采集、ROS2 话题以及模拟器指令发布整合到一个无缝的流水线中。它针对 Ubuntu 和 ROS2 Humble 进行了快速部署设计,让语音驱动的机器人实验易于运行。


第 1 部分 — 安装 ROS2 Humble
如果你的机器上已经安装了 ROS2 Humble,可以跳过本部分。 通过运行:
ros2 --version进行检查
1.1 设置 ROS2 的 apt 软件源
# Make sure your system is up to date
sudo apt update && sudo apt upgrade -y
# Install required tools
sudo apt install -y software-properties-common curl
# Add the ROS2 GPG key
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key \
-o /usr/share/keyrings/ros-archive-keyring.gpg
# Add the ROS2 repository to your sources
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] \
http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" \
| sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
1.2 安装 ROS2 Humble Desktop
sudo apt update
sudo apt install -y ros-humble-desktop
desktop版本包含 TurtleSim、RViz 以及你所需的全部工具。 下载大小约为 1 GB —— 可能需要几分钟时间。
1.3 安装构建工具
sudo apt install -y python3-colcon-common-extensions python3-rosdep
1.4 在每个终端中自动 source ROS2
echo "source /opt/ros/humble/setup.bash" >> ~/.bashrc
source ~/.bashrc
1.5 验证安装
ros2 --version
# Expected output: ros2 cli version 0.18.x (or similar)
然后测试 TurtleSim 以确认一切正常工作:
# Terminal 1
ros2 run turtlesim turtlesim_node
# Terminal 2
ros2 run turtlesim turtle_teleop_key
你应该会看到一个窗口,其中有一只可以用方向键控制的乌龟。完成后在两个终端中按下 Ctrl+C。
第 2 部分 — 为设备创建 udev 规则
创建一个新的 udev 规则,以确保 reSpeaker USB Mic Array 拥有正确的权限:
sudo nano /etc/udev/rules.d/50-respeaker.rules
在文件中添加以下几行:
# ReSpeaker USB Mic Array
SUBSYSTEM=="usb", ATTR{idVendor}=="2886", ATTR{idProduct}=="0018", MODE="0666", GROUP="plugdev"
SUBSYSTEM=="usb", ATTR{idVendor}=="2886", ATTR{idProduct}=="001a", MODE="0666", GROUP="plugdev"
重新加载 udev 规则并重启服务
重新加载 udev 规则并重启服务,使更改生效:
sudo udevadm control --reload-rules
sudo udevadm trigger
sudo service udev restart
拔下并重新插入你的 reSpeaker USB Mic Array 以应用新规则。
第 3 部分 — 获取 Groq API Key
本项目使用 Groq 的免费云 API 来完成:
- Whisper — 语音转文本
- LLaMA 3 — 理解你的指令
- Orpheus — Jarvis 的语音回复
- 访问 console.groq.com 并创建一个免费账号
- 点击左侧边栏中的 API Keys
- 点击 Create API Key,给它起一个名字(例如 "jarvis"),并复制它
- 将它保存在安全的位置 —— 稍后你会把它粘贴到
config.env中
Groq 的免费套餐足以满足开发和测试需求。 开始使用不需要信用卡。
第 4 部分 — 安装 Python 依赖(系统范围)
重要: 不要为本项目使用虚拟环境。 ROS2 使用系统 Python,无法看到安装在 venv 中的包。 我们使用
--break-system-packages安装所有内容,以便让 ROS2 节点可以使用它们。
pip install \
groq \
openwakeword \
pyaudio \
numpy<2 \
python-dotenv \
pyusb \
下载 “Hey Jarvis” 唤醒词模型
python3 -c "import openwakeword; openwakeword.utils.download_models()"
这会将预训练模型下载到 ~/.openwakeword/。大约需要 30 秒。
安装 PortAudio(PyAudio 所需)
sudo apt install -y portaudio19-dev python3-pyaudio
第 5 部分 — 创建你的 ROS2 工作空间
如果你已经有
~/ros2_ws工作空间,请跳到第 6 部分。
# Create the workspace directory
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws
# Build the empty workspace to set it up
colcon build
# Source it and add to .bashrc so it loads automatically
echo "source ~/ros2_ws/install/setup.bash" >> ~/.bashrc
source ~/.bashrc
第 6 部分 — 克隆并配置项目
6.1 克隆仓库
如果你使用的是 Flex
cd ~/ros2_ws/src
git clone https://github.com/KasunThushara/ros_voice_controller_flex.git my_robot_controller
如果你使用的是 XVF3800
cd ~/ros2_ws/src
git clone https://github.com/KasunThushara/ros_voice_controller.git my_robot_controller
你的工作空间现在应该看起来像这样:
~/ros2_ws/
└── src/
└── my_robot_controller/
├── my_robot_controller/
│ ├── voice_node.py
│ ├── rotate_doa.py
│ ├── wakeword.py
│ └── ...
├── launch/
│ └── jarvis.launch.py
└── config.env.example
6.2 创建你的配置文件
cd ~/ros2_ws/src/my_robot_controller
cp config.env.example config.env
nano config.env
打开该文件并填写你的参数值:
# ── Groq API (required) ────────────────────────────────
GROQ_API_KEY=gsk_xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx ← paste your key here
# ── Microphone ─────────────────────────────────────────
MIC_INDEX=1 ← find the correct number in Step 6.3 below
WAKEWORD_THRESHOLD=0.5
WAKEWORD_COOLDOWN=2
# ── Recording ──────────────────────────────────────────
RECORDING_SECONDS=4
SAMPLE_RATE=16000
# ── Models ─────────────────────────────────────────────
WAKEWORD_MODEL=hey jarvis
LLM_MODEL=llama-3.1-8b-instant
STT_MODEL=whisper-large-v3-turbo
TTS_MODEL=canopylabs/orpheus-v1-english
TTS_VOICE=autumn
使用 Ctrl+O、Enter、Ctrl+X 保存。
6.3 找到正确的 MIC_INDEX
运行这个辅助脚本来列出所有音频输入设备:
python3 -c "
import pyaudio
p = pyaudio.PyAudio()
print('\nAvailable INPUT devices:\n')
for i in range(p.get_device_count()):
d = p.get_device_info_by_index(i)
if d['maxInputChannels'] > 0:
print(f' [{i}] {d[\"name\"]}')
print(f' channels={int(d[\"maxInputChannels\"])} rate={int(d[\"defaultSampleRate\"])}Hz')
p.terminate()
"
示例输出:
Available INPUT devices:
[0] HDA Intel PCH: ALC897 Analog
channels=2 rate=44100Hz
[1] reSpeaker Flex XVF3800
channels=6 rate=16000Hz ← this is the one you want
[2] USB PnP Sound Device
channels=2 rate=16000Hz
找到包含 reSpeaker Flex 或 reSpeaker Flex XVF3800 的那一行。记下方括号中的数字 —— 这就是你的 MIC_INDEX。在 config.env 中用该数字进行更新。
第 7 部分 — 构建软件包
cd ~/ros2_ws
colcon build --packages-select my_robot_controller
source ~/.bashrc
预期输出:
Starting >>> my_robot_controller
Finished <<< my_robot_controller [3.2s]
Summary: 1 package finished [3.5s]
每次更改任何 Python 文件时,你都必须运行
colcon build并执行source ~/.bashrc。
第 8 部分 — 运行项目
ros2 launch my_robot_controller jarvis.launch.py
你应该会看到三个进程启动:
[turtlesim_node-1] [INFO] Spawning turtle [turtle1] at x=[5.54], y=[5.54]
[angle_controller-2] [INFO] AngleController ready — listening on /target_angle
[voice_command-3] [INFO] reSpeaker Flex XVF3800 found — DoA ready
[voice_command-3] [WakeWord] Listening on device 1 (6ch → mono) for 'hey jarvis' ...
[voice_command-3] [INFO] Jarvis is listening ...
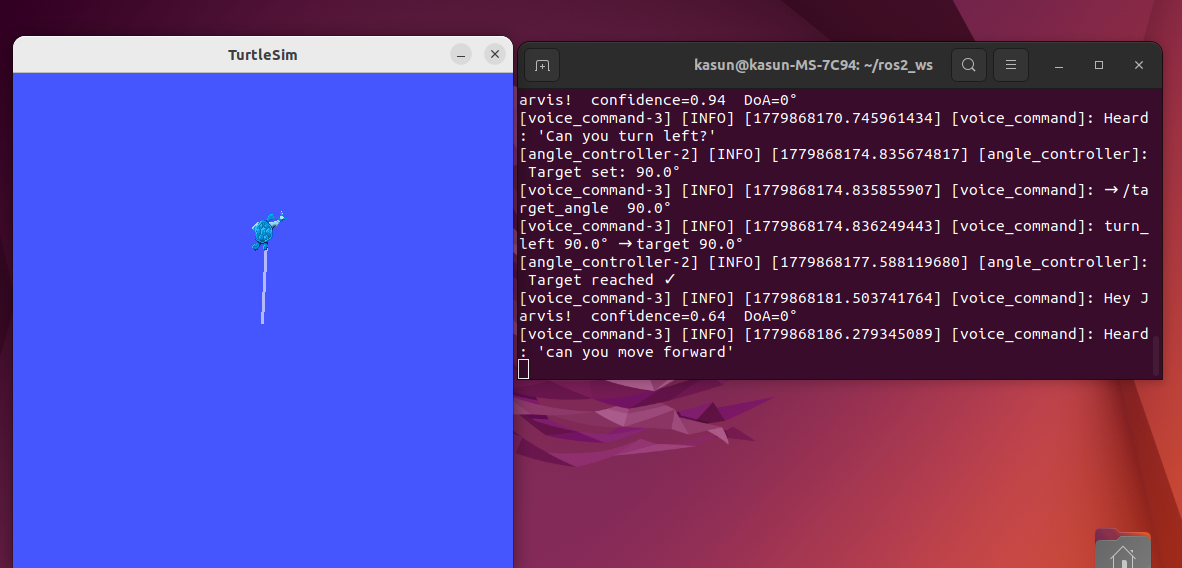
会弹出一个窗口显示小海龟。现在说:
"Hey Jarvis, move forward"
Jarvis 会回复 “Moving forward!”,然后小海龟会移动。
语音指令参考
| 说这句 | 会发生什么 |
|---|---|
"Hey Jarvis, move forward" | 小海龟向前移动 1 步 |
"Hey Jarvis, move backward" | 小海龟向后移动 1 步 |
"Hey Jarvis, turn left" | 小海龟向左旋转 90° |
"Hey Jarvis, turn left 45" | 小海龟向左旋转 45° |
"Hey Jarvis, turn right" | 小海龟向右旋转 90° |
"Hey Jarvis, turn right 30 degrees" | 小海龟向右旋转 30° |
"Hey Jarvis, turn to my direction" | 小海龟朝向你的声音方向(DoA) |
"Hey Jarvis, face me" | 同上 |
"Hey Jarvis, turn to 90" | 小海龟旋转到绝对 90° |
"Hey Jarvis, face 180 degrees" | 小海龟旋转到绝对 180° |
"Hey Jarvis, spin around" | 小海龟做一次完整的 360° 旋转 |
"Hey Jarvis, do a 360" | 同上 |
"Hey Jarvis, stop" | 小海龟立即停止 |
项目文件结构
my_robot_controller/
│
├── my_robot_controller/ # Python package (ROS2 nodes)
│ ├── __init__.py
│ ├── voice_node.py # Main voice pipeline node
│ ├── rotate_doa.py # PID angle controller node
│ ├── wakeword.py # Wake word detection (openwakeword)
│ ├── audio_recorder.py # Mic recording after wake word
│ ├── stt.py # Speech-to-text (Groq Whisper)
│ ├── llm.py # Intent parsing (Groq LLaMA)
│ ├── tts.py # Text-to-speech (Groq Orpheus)
│ └── config.py # Loads settings from config.env
│
├── launch/
│ └── jarvis.launch.py # Starts all 3 nodes together
│
├── config.env # Your secrets (not in git)
├── config.env.example # Template — copy to config.env
├── package.xml
└── setup.py
节点如何连接
reSpeaker Flex (USB)
│
├── [voice_command node]
│ openwakeword → Groq Whisper → Groq LLaMA → Groq Orpheus
│ │ │
│ │ publishes /target_angle (Float32) │ speaks reply
│ │ publishes /turtle1/cmd_vel (Twist) │
│ │ ▼
│ ▼ Speaker output
└── [angle_controller node]
subscribes /target_angle
subscribes /turtle1/pose
PID control → publishes /turtle1/cmd_vel
│
▼
[turtlesim_node]
配置参考
所有设置都保存在 config.env 中。编辑并重新构建以应用更改。
| 变量 | 默认值 | 描述 |
|---|---|---|
GROQ_API_KEY | (required) | 你的 Groq API 密钥 |
MIC_INDEX | 1 | reSpeaker 的 PyAudio 设备索引 |
WAKEWORD_MODEL | hey jarvis | 唤醒词短语 |
WAKEWORD_THRESHOLD | 0.5 | 检测灵敏度(0.0–1.0,数值越低越灵敏) |
WAKEWORD_COOLDOWN | 2 | 唤醒词可再次触发前的冷却时间(秒) |
RECORDING_SECONDS | 4 | 唤醒词触发后录音时长 |
SAMPLE_RATE | 16000 | 音频采样率(Hz) |
LLM_MODEL | llama-3.1-8b-instant | 用于意图解析的 Groq LLM 模型 |
STT_MODEL | whisper-large-v3-turbo | 用于转写的 Groq Whisper 模型 |
TTS_MODEL | canopylabs/orpheus-v1-english | Groq TTS 模型 |
TTS_VOICE | autumn | 语音输出所用的声音(tara、leah、leo、dan、mia) |
资源
基于以下组件构建:
- Seeed Studio reSpeaker Flex — 带有 XMOS XVF3800 芯片的麦克风阵列
- ROS2 Humble — 机器人中间件
- openwakeword — 本地唤醒词检测
- Groq — 超高速 Whisper STT、LLaMA LLM、Orpheus TTS
- TurtleSim — ROS2 小海龟模拟器
技术支持与产品讨论
感谢你选择我们的产品!我们将为你提供多种支持,确保你在使用我们产品的过程中尽可能顺利。我们提供多种沟通渠道,以满足不同的偏好和需求。