使用 Pico-voice 控制 reSpeaker XVF3800 唤醒词和 NLU
介绍
Picovoice 是一家专注于端侧语音 AI 的公司,提供包括唤醒词检测、语音转文本和意图识别在内的完整技术栈,这些技术都可以在嵌入式和边缘设备上本地运行,而无需依赖云端。其解决方案专为低延迟、隐私保护和跨平台部署而设计,非常适合物联网和机器人系统。
Porcupine 是 Picovoice 的轻量级且高精度的唤醒词检测引擎,基于深度神经网络构建,并针对嵌入式系统进行了优化。它能够实现始终监听的应用,同时保持较低的计算成本,并可在微控制器、Raspberry Pi、移动端和桌面端等多种平台上运行。
Picovoice Rhino 是一款语音转意图引擎,可以在不依赖单独语音转文本步骤的情况下,直接将口语命令转换为结构化意图。它采用单步深度学习方法,将语音识别与自然语言理解相结合,以提升准确率并降低延迟。
什么是 NLP、NLU 和 STT?
自然语言处理(NLP)是让机器处理人类语言的广泛领域,而自然语言理解(NLU)是其中的一个子集,专注于从语言中提取含义或意图。语音转文本(STT)将语音音频转换为文本,通常随后交给 NLU 来理解用户意图。Picovoice Rhino 采用了不同的方法,它跳过 STT,直接将语音转换为意图(语音转意图),从而提升效率和准确性。
关键词(唤醒词)检测(例如 “Hey device”)是激活系统的第一步,激活后会使用 STT → NLU 流水线或语音转意图(Rhino)来理解并执行命令。
目标
本演示展示了如何在 Raspberry Pi 上将使用 Picovoice Porcupine 的唤醒词检测与 Picovoice Rhino 结合,实现高效的语音转意图处理。系统首先监听关键词以进行激活,一旦被触发,就会直接将口语命令转换为可执行的意图,而无需依赖繁重的云端处理。这种方法针对低资源嵌入式设备进行了高度优化,非常适合机器人和边缘 AI 应用。它支持低延迟、实时的语音交互,即使在受限硬件上也能确保快速可靠的性能。
所需硬件

唤醒词检测
在机器人嵌入式系统中,唤醒词可以实现事件驱动处理,使设备保持在低功耗监听状态,仅在需要时才激活高负载的语音处理。这大幅降低了在微控制器和边缘设备等资源受限硬件上的 CPU、内存和能耗。同时,它在音频处理链路中充当门控机制,过滤无关噪声,避免不必要地触发语音识别和控制逻辑。从隐私角度看,唤醒词检测确保只有在检测到明确的用户意图后才会采集或传输音频,从而将大部分数据处理保留在本地。此外,它通过提供自然的交互触发方式,帮助系统区分环境对话和面向设备的指令,从而提升人机交互体验。
将唤醒词与像 reSpeaker XVF3800 这样的高级麦克风阵列系统结合使用,可以在具身系统中实现高效且可靠的语音交互。唤醒词确保系统只在需要时才激活完整的语音处理,从而降低嵌入式硬件上的功耗和 CPU 使用率。麦克风阵列则通过在环形麦克风阵列上提供波束成形、噪声抑制和方向检测来增强这一点,即使在嘈杂环境中也能实现准确的唤醒词识别。这种组合将误触发降到最低,并提升整体系统响应速度。同时,它还能确保设备只在被明确呼叫时才做出响应,并能聚焦于正确的说话人,从而支持更好的人人机交互。
如何在 Pico-voice 中使用唤醒词
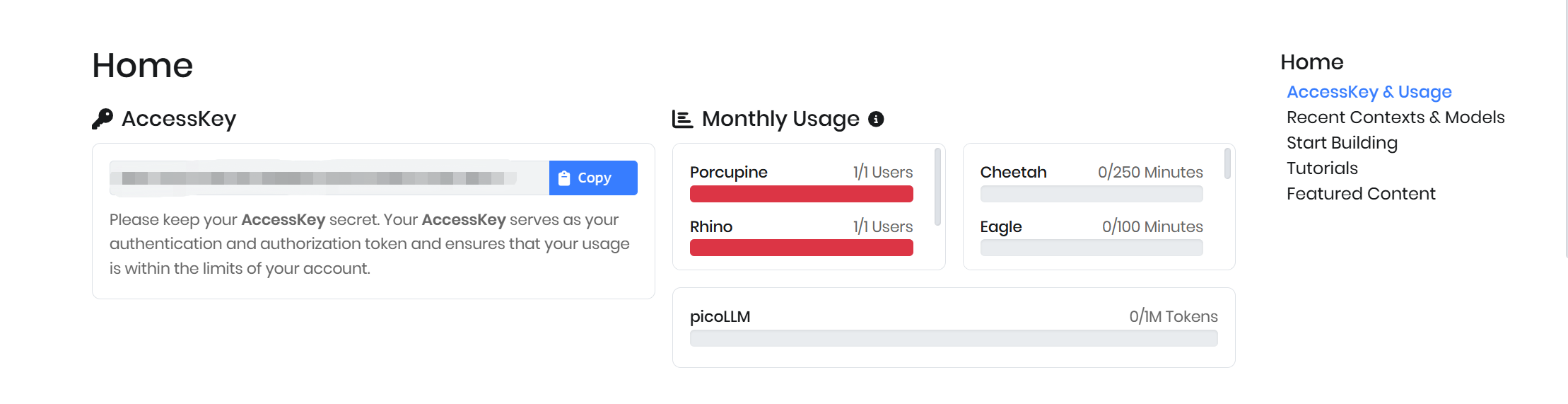
在 Picovoice 注册账号后,你将获得 Access Key(访问密钥)
选项 A:内置关键词
Porcupine 提供了多种内置唤醒词选项,例如 AMERICANO、BLUEBERRY、BUMBLEBEE、GRAPEFRUIT、GRASSHOPPER、PICOVOICE、PORCUPINE、TERMINATOR 和 JARVIS, 只要有有效的访问密钥即可直接使用。借助访问密钥,这些关键词可以轻松集成到你的应用中,而无需训练自定义模型。
在本方案中,我们使用 Raspberry Pi 5 作为主机设备,唤醒词检测将在设备本地运行。基于 XMOS 的麦克风系统刷写了 USB audio 固件,使其可以被操作系统识别为标准音频输入设备。
首先需要在环境中安装 Porcupine 所需的库和依赖。
pip install pvporcupine
安装完成后,可以使用示例代码来初始化音频录制器、加载选定的关键词,并持续监听唤醒词。一旦检测到关键词,系统即可触发后续操作,例如录音或处理语音命令。
import pvporcupine
from pvrecorder import PvRecorder
access_key = "YOUR_ACCESS_KEY"
porcupine = pvporcupine.create(
access_key=access_key,
keywords=["porcupine"]
)
recorder = PvRecorder(device_index=-1, frame_length=porcupine.frame_length)
recorder.start()
print("Listening...")
while True:
pcm = recorder.read()
result = porcupine.process(pcm)
if result >= 0:
print("Wake word detected!")
porcupine.delete()
recorder.stop()
recorder.delete()
选项 B:自定义关键词
进入 Picovoice Console 并打开自定义唤醒词页面。选择你偏好的语言并定义一个唤醒词,例如 “hi flex”。你可以在控制台中测试该唤醒词,以验证其检测性能。
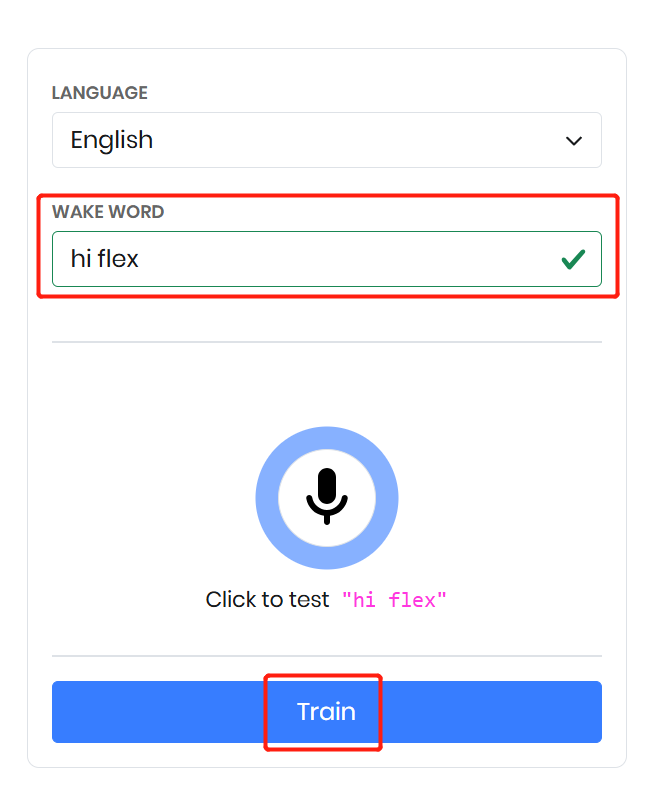
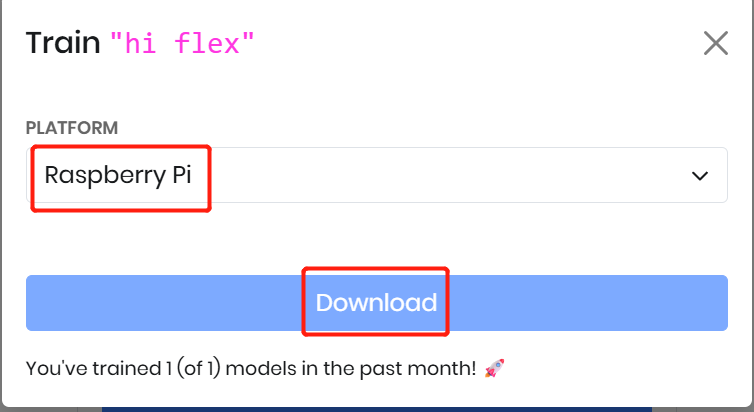
确认满意后,点击 Train 生成模型。然后选择你的目标平台——这里我们选择 Raspberry Pi。最后下载生成的 .ppn 文件,它将在你的应用中用于自定义唤醒词检测。
示例代码
import pvporcupine
from pvrecorder import PvRecorder
access_key = "YOUR_ACCESS_KEY"
porcupine = pvporcupine.create(
access_key=access_key,
keyword_paths=["/home/pi/porcupine_env/hi-flex_en_raspberry-pi_v4_0_0.ppn"]
)
recorder = PvRecorder(device_index=-1, frame_length=porcupine.frame_length)
recorder.start()
print("Listening...")
while True:
pcm = recorder.read()
result = porcupine.process(pcm)
if result >= 0:
print("Wake word detected!")
porcupine.delete()
recorder.stop()
recorder.delete()
语音转意图
Picovoice Rhino 是一款语音转意图引擎,可以在不依赖单独语音转文本步骤的情况下,直接将口语命令转换为结构化意图。它采用单步深度学习方法,将语音识别与自然语言理解相结合,以提升准确率并降低延迟。 Rhino 针对实时、本地处理进行了优化,这意味着它可以离线工作,零网络延迟,并将所有语音数据保留在本地以保护隐私。它非常高效,专为 Raspberry Pi 和微控制器等嵌入式与物联网系统设计。 此外,Rhino 允许开发者定义带有意图和槽位的自定义上下文,使系统能够理解特定领域的命令,并直接从语音输入中触发相应动作。
创建一个上下文
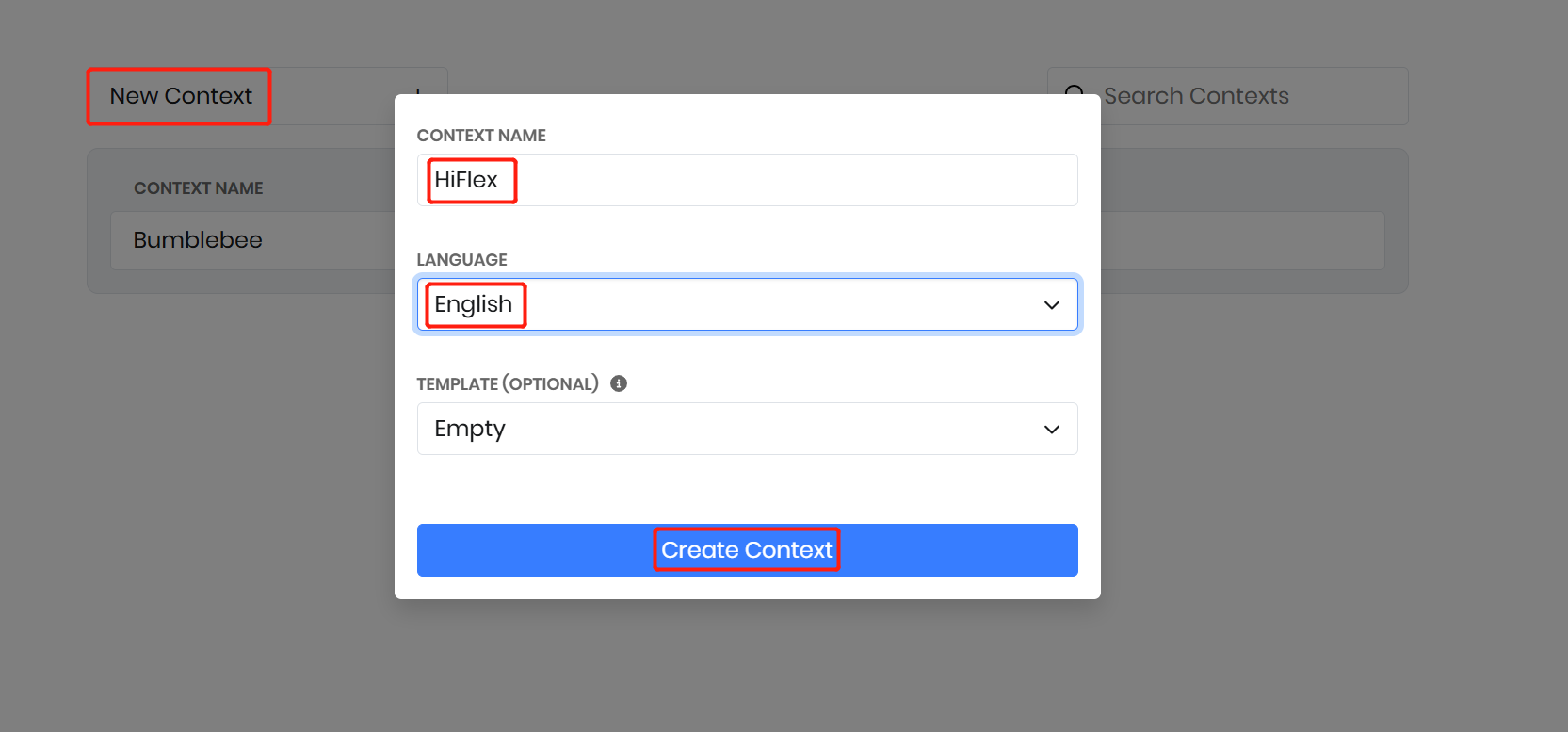
上下文定义了特定领域内的口语命令、意图和槽位集合;在这里,我们创建一个 “Bumblebee” 上下文,用语音命令控制 ReSpeaker Flex。进入 Picovoice 中的 Rhino Speech-to-Intent 控制台,然后使用 “Empty” 模板创建一个名为 Bumblebee 的新上下文。
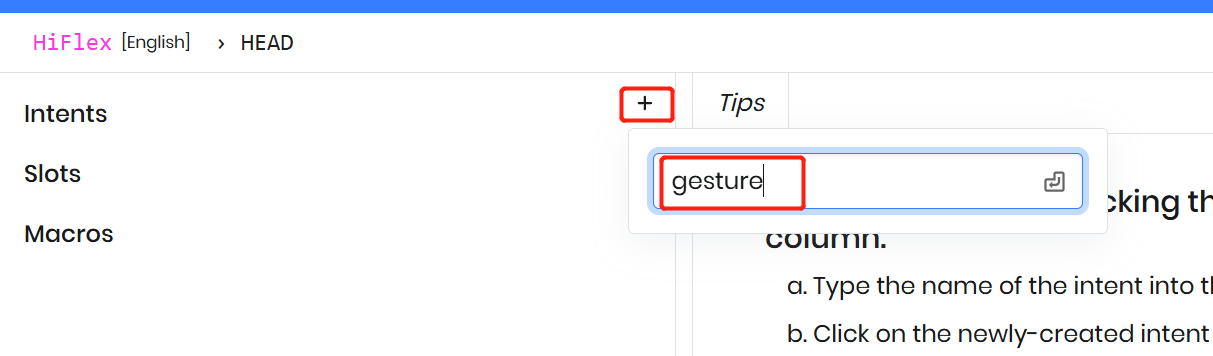
创建意图
在顶层,一个上下文是表示用户在某一领域内操作的意图集合。例如,在 HiFlex 上下文中创建一个名为 “Gesture” 的意图,用于表示与手势相关的语音命令。
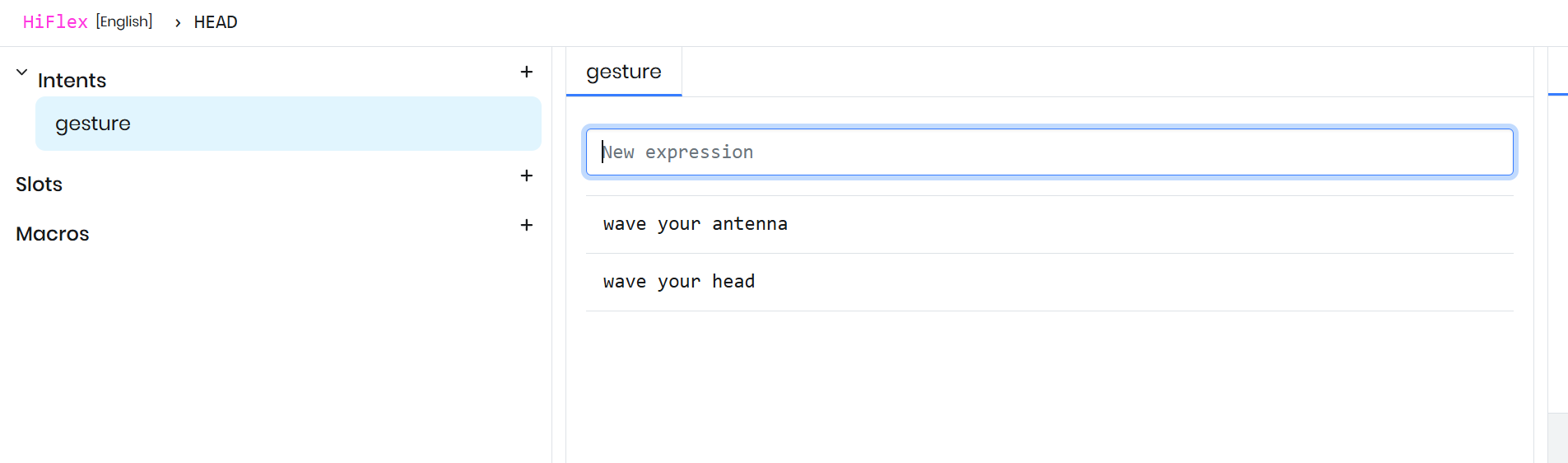
为意图添加表达式
用户可以用多种方式表达同一个意图,每一种变体都称为一个表达式。对于 Gesture 意图,可以添加诸如 “wave your head” 和 “shake your antenna” 这样的表达式,因为它们都映射到同一组动作。
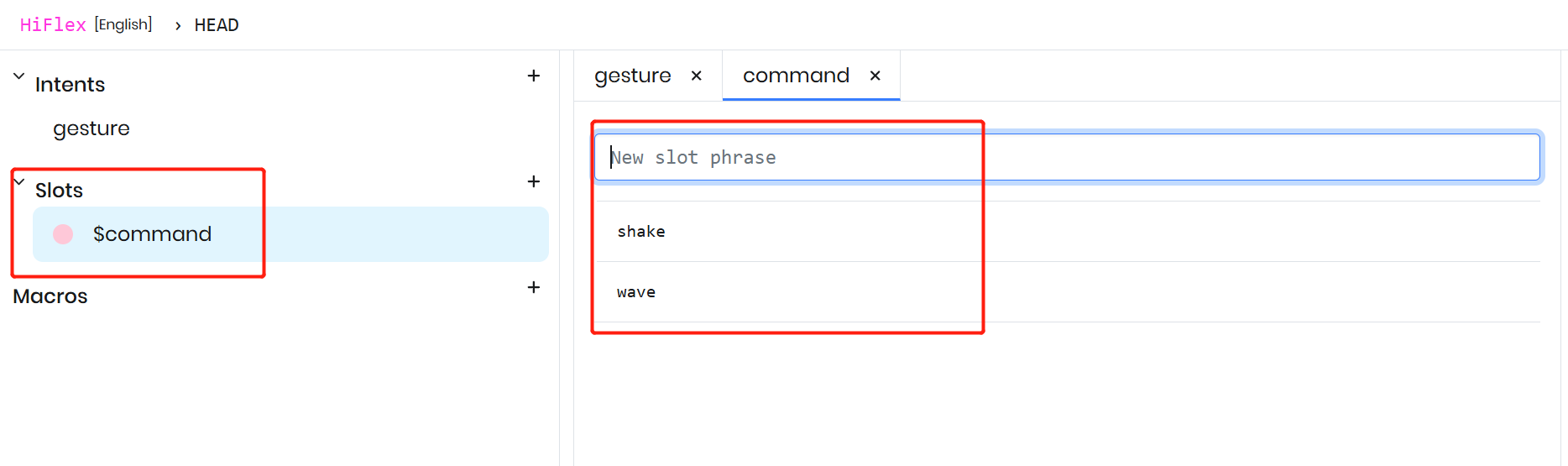
使用槽位捕获变量
使用槽位来捕获用户话语中的可变部分。在本例中,“wave” 和 “shake” 这样的词表示指令中的变化状态,因此可以将它们建模为变量。在 Rhino 上下文中创建一个名为 “commands” 的槽位,以动态捕获这些变化。

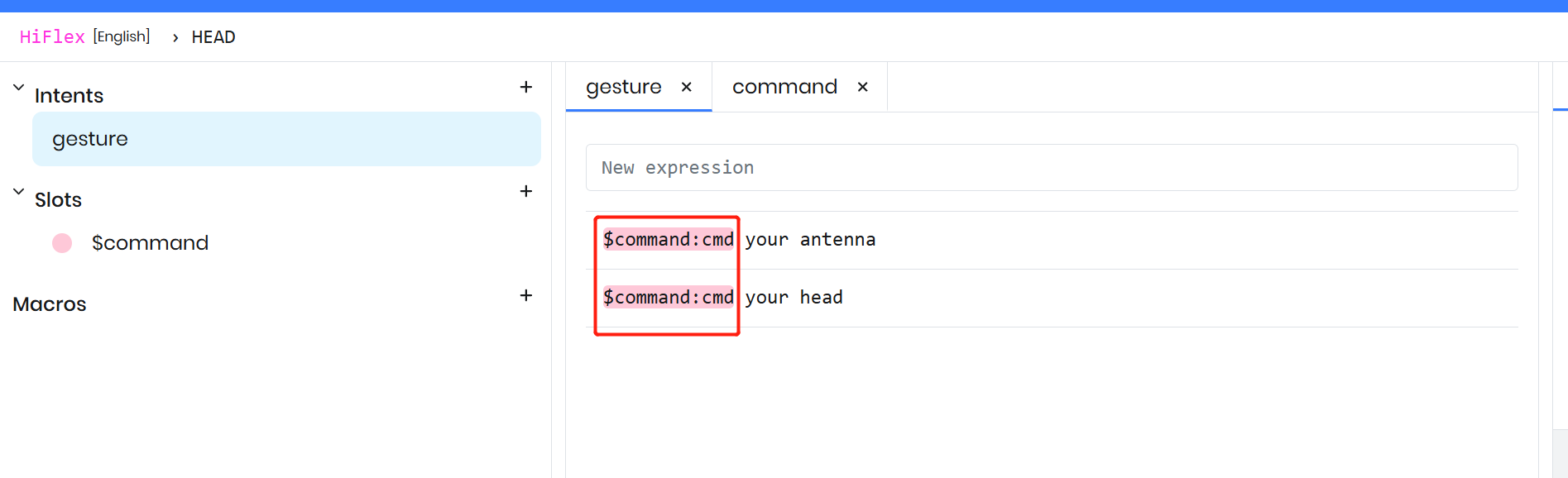
修改现有表达式以包含新创建的槽位。添加槽位时,使用 $ 符号来表示槽位,然后从自动完成下拉列表中选择所需的槽位类型并为其指定名称。
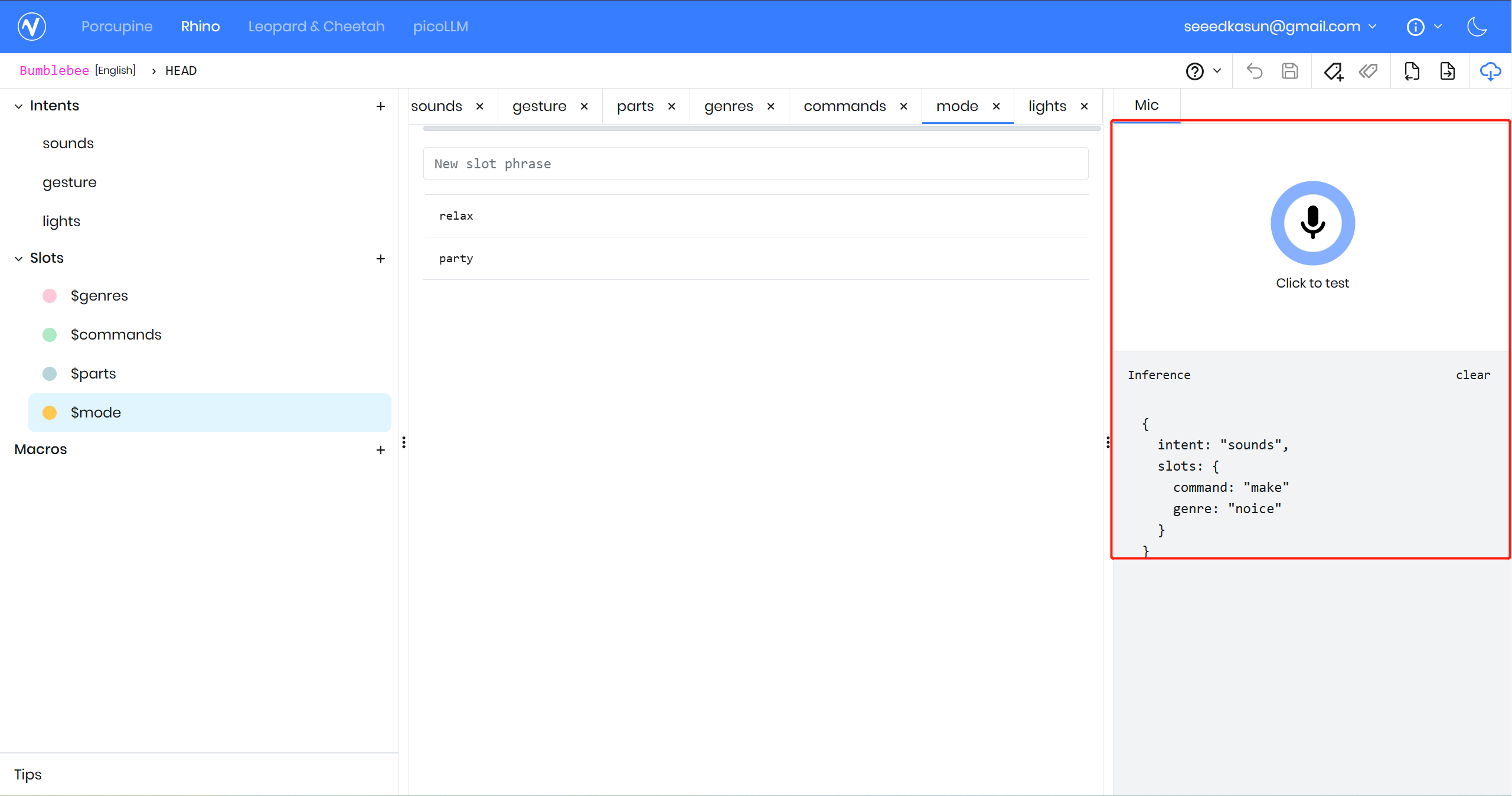
如果你已经准备好,可以先点击 test 进行测试
让我们下载模型
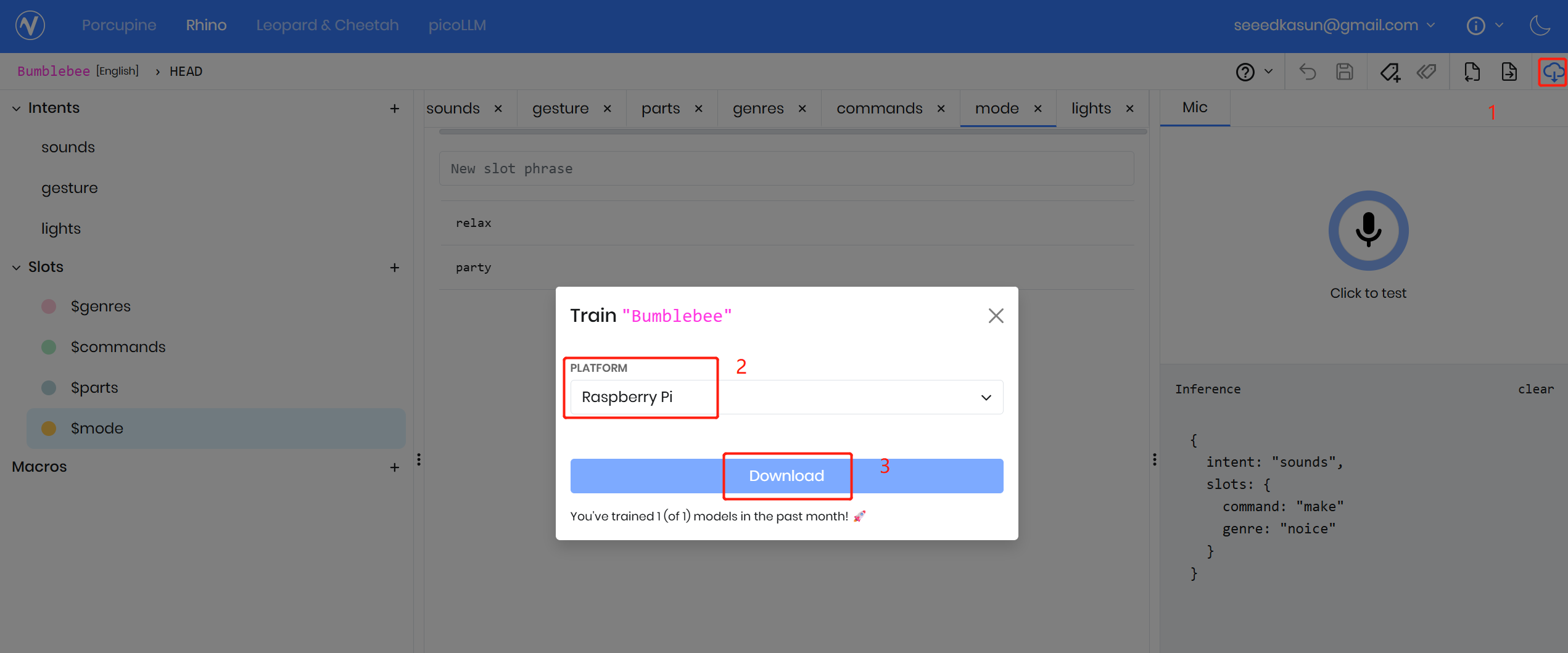
一旦上下文设计完成,点击右上角的下载图标,选择目标平台,然后点击 “Download.”。Picovoice Console 将会自动为该平台训练 Rhino 模型,这通常需要大约 5–10 秒。
示例代码
import pvporcupine
import pvrhino
from pvrecorder import PvRecorder
access_key = "ACCESS KEY"
rhino = pvrhino.create(
access_key=access_key,
context_path="/home/pi/porcupine_env/Bumblebee_en_raspberry-pi_v4_0_0.rhn",
)
recorder = PvRecorder(device_index=-1, frame_length=rhino.frame_length)
recorder.start()
print("Listening...")
while True:
pcm = recorder.read()
is_finalized = rhino.process(pcm)
if is_finalized:
inference = rhino.get_inference()
if inference.is_understood:
print("Intent:", inference.intent)
print("Slots:", inference.slots)
else:
print("Didn't understand")
rhino.reset()
技术支持与产品讨论
感谢你选择我们的产品!我们将为你提供多种支持,以确保你在使用我们产品的过程中尽可能顺利。我们提供多种沟通渠道,以满足不同的偏好和需求。