使用 reSpeaker + HorizonArm-Mark 部署您的语音控制智能机械臂
目标:让 HorizonArm-Mark 机械臂与 reSpeaker XVF3800 配合工作,实现语音控制机械臂操作。
Seeed-Projects:https://github.com/Seeed-Projects
reSpeaker XVF3800 是一款基于 XMOS XVF3800 芯片的专业 4 麦克风圆形阵列。它具有双模式、360° 远场拾音(最远 5 米)、声学回声消除(AEC)、自动增益控制(AGC)、到达方向(DoA)、去混响、波束成形和噪声抑制功能,在嘈杂环境中提供可靠的语音拾取。凭借其强大的音频捕获和降噪能力,它为语音控制应用提供了出色的"耳朵"。
第一部分:reSpeaker 硬件和固件准备
本节介绍如何为 reSpeaker XVF3800 刷写 USB 固件。USB 固件支持即插即用模式,允许直接连接到 PC、Raspberry Pi 和其他设备。 USB 固件仅支持 USB DFU(不支持 I2C DFU)。如果设备当前运行的是 I2S 固件,请先进入安全模式,然后使用 USB DFU 刷写 USB 固件。安全模式同时支持 USB DFU 和 I2C DFU。
参考资源:
1.1 准备工作
硬件要求
| 物品 | 描述 |
|---|---|
| reSpeaker XVF3800 USB 4-Mic Array | 主控制器麦克风阵列 |
| USB Type-C 线缆 | 用于供电和数据传输 |
| 计算机 | Windows / macOS / Linux 兼容 |
软件准备(安装 dfu-util)
Windows:
- 下载并解压
dfu-util二进制文件(例如,D:\dfu-util-0.11-binaries\win64\) - 将包含
dfu-util.exe的目录添加到系统 PATH - 打开命令提示符并运行
dfu-util -V验证安装 - 如果
dfu-util -l返回LIBUSB_ERROR_NOT_SUPPORTED,请使用 Zadig 将设备驱动程序替换为 WinUSB
macOS (Homebrew):
brew install dfu-util
dfu-util -l
Linux (Debian / Ubuntu / Raspberry Pi OS):
sudo apt update
sudo apt install dfu-util
sudo dfu-util -l
下载 USB 固件
访问固件仓库:https://github.com/respeaker/reSpeaker_XVF3800_USB_4MIC_ARRAY/tree/master/xmos_firmwares
根据您的需求选择以下 USB 固件之一(通常 2 通道版本就足够了):
| 固件 | 通道数 | 描述 |
|---|---|---|
respeaker_xvf3800_usb_dfu_firmware_v2.0.x.bin | 2 | 处理后的双通道输出 通道 0:会议 通道 1:ASR |
respeaker_xvf3800_usb_dfu_firmware_6chl_v2.0.x.bin | 6 | 通道 0:处理后的音频(会议) 通道 1:处理后的音频(ASR) 通道 2-5:麦克风 0-3 的原始数据 |
1.2 连接并进入 DFU 模式
接线说明
连接到计算机时,请使用靠近 3.5mm 耳机插孔的 USB-C 端口(XMOS 侧)。不要使用 XIAO 侧端口。
进入安全模式
在以下情况下需要安全模式:
- 当前固件处于 I2S 模式,需要切换到 USB 模式
- 固件损坏或刷写了错误的固件
操作步骤:
- 完全断开设备电源
- 按住板载静音按钮
- 在按住按钮的同时,重新连接电源
- 当红色 LED 开始闪烁时,松开按钮——设备已进入安全模式
1.3 使用 dfu-util 刷写 USB 固件
确认设备可见性
运行以下命令检查设备是否被识别:
# Linux / Raspberry Pi OS
sudo dfu-util -l
# macOS / Windows
dfu-util -l
预期输出应包含:Found DFU: [2886:001a] ... alt=1, name="reSpeaker DFU Upgrade"
执行刷写命令
# Linux / Raspberry Pi OS (needs sudo)
sudo dfu-util -R -e -a 1 -D /path/to/respeaker_xvf3800_usb_dfu_firmware_v2.0.x.bin
# macOS / Windows (no sudo needed)
dfu-util -R -e -a 1 -D /path/to/respeaker_xvf3800_usb_dfu_firmware_v2.0.x.bin
参数说明:
-R:刷写完成后重置/重启设备-e:擦除原始固件-a 1:写入升级分区-D:指定固件文件路径
刷写完成后,设备将自动重启并加载 USB 固件。
1.4 验证和故障排除
验证固件
刷写 USB 固件后,您可以按以下方式验证:
-
设备管理器检测
- Windows:打开设备管理器;您应该在"声音、视频和游戏控制器"下看到"reSpeaker 3800"
- macOS/Linux:运行
lsusb命令检查设备是否被识别为 USB 音频设备

-
录音测试
- 使用 Audacity 或其他录音软件
- 选择"reSpeaker 3800"作为录音设备
- 将采样率设置为 16000 Hz,通道数根据刷写的固件设置(2 或 6 通道)
- 开始录音并测试语音捕获
常见问题
问:使用 dfu-util -l 无法检测到设备?
- 检查 USB 线缆和端口(必须使用 XMOS 侧连接器,即靠近 3.5mm 耳机插孔的 USB-C 端口)
- 如果设备当前运行的是 I2S 固件,请先进入安全模式
- Windows 用户:确保通过 Zadig 使用 WinUSB 驱动程序
问:刷写过程中出现错误?
- 尝试更换 USB 线缆或主机端口
- 在安全模式下重新刷写
问:刷写后计算机无法识别设备?
- 确保您使用的是 USB 固件文件(文件名以
usb开头),而不是 I2S 固件 - 尝试重新插拔设备或更换 USB 端口
问:录音时没有声音或声音异常?
- 检查录音软件的采样率是否设置为 16000 Hz
- 确认通道数与固件匹配(2 或 6 通道)
- 检查麦克风是否被静音(查看红色静音 LED 是否亮起;按静音按钮取消静音)
第二部分:软件配置和连接
2.1 硬件连接
确保控制计算机通过 USB 同时连接到机械臂和麦克风阵列。
2.2 连接机械臂
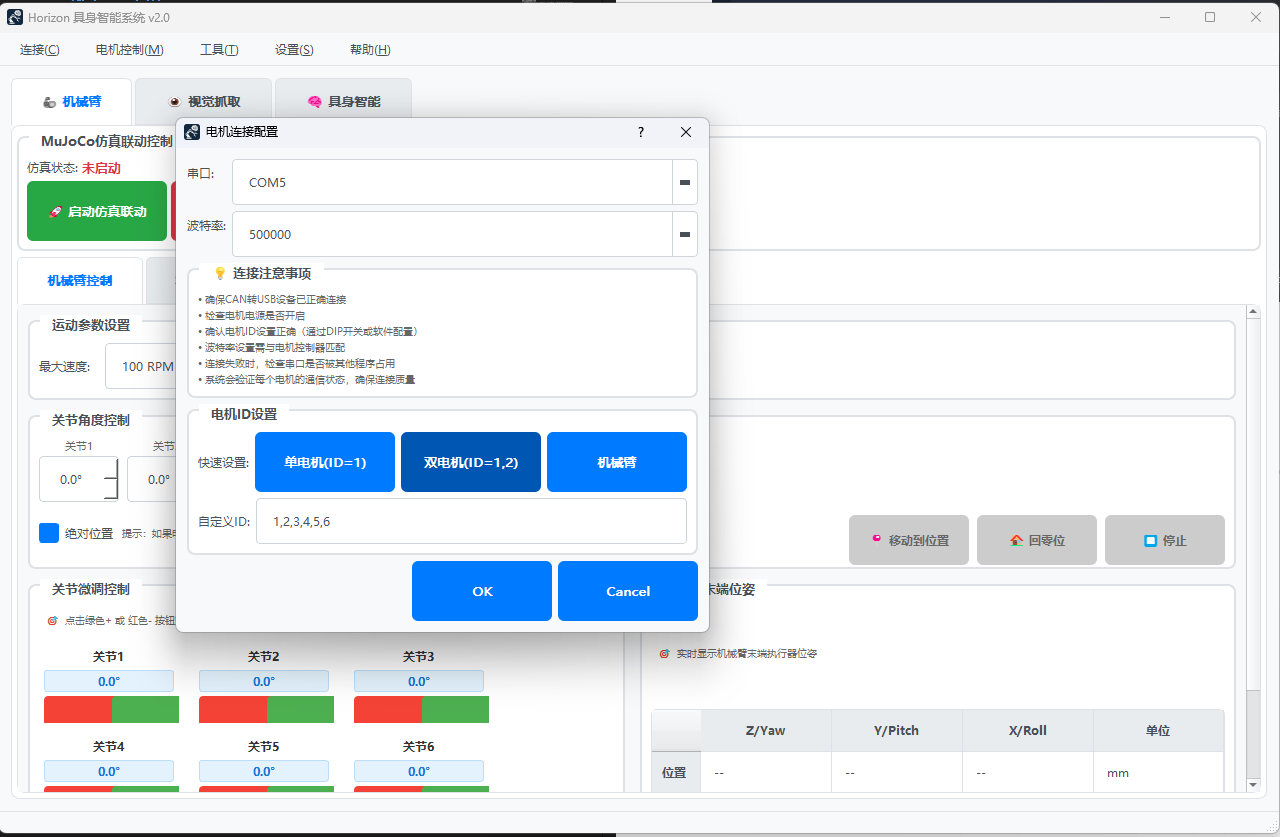
- 打开机械臂控制软件 HorizonArm
- 点击左上角的连接按钮
- 选择对应的串口(例如 COM3)和波特率(500000)
- 选择电机 ID 设置 → 机械臂 → 自定义 ID,确认显示:1, 2, 3, 4, 5, 6
- 点击连接
连接成功后,您可以在 HorizonArm 界面上看到机械臂的状态。点击归零将机械臂返回到初始位置(90 度直立状态)。
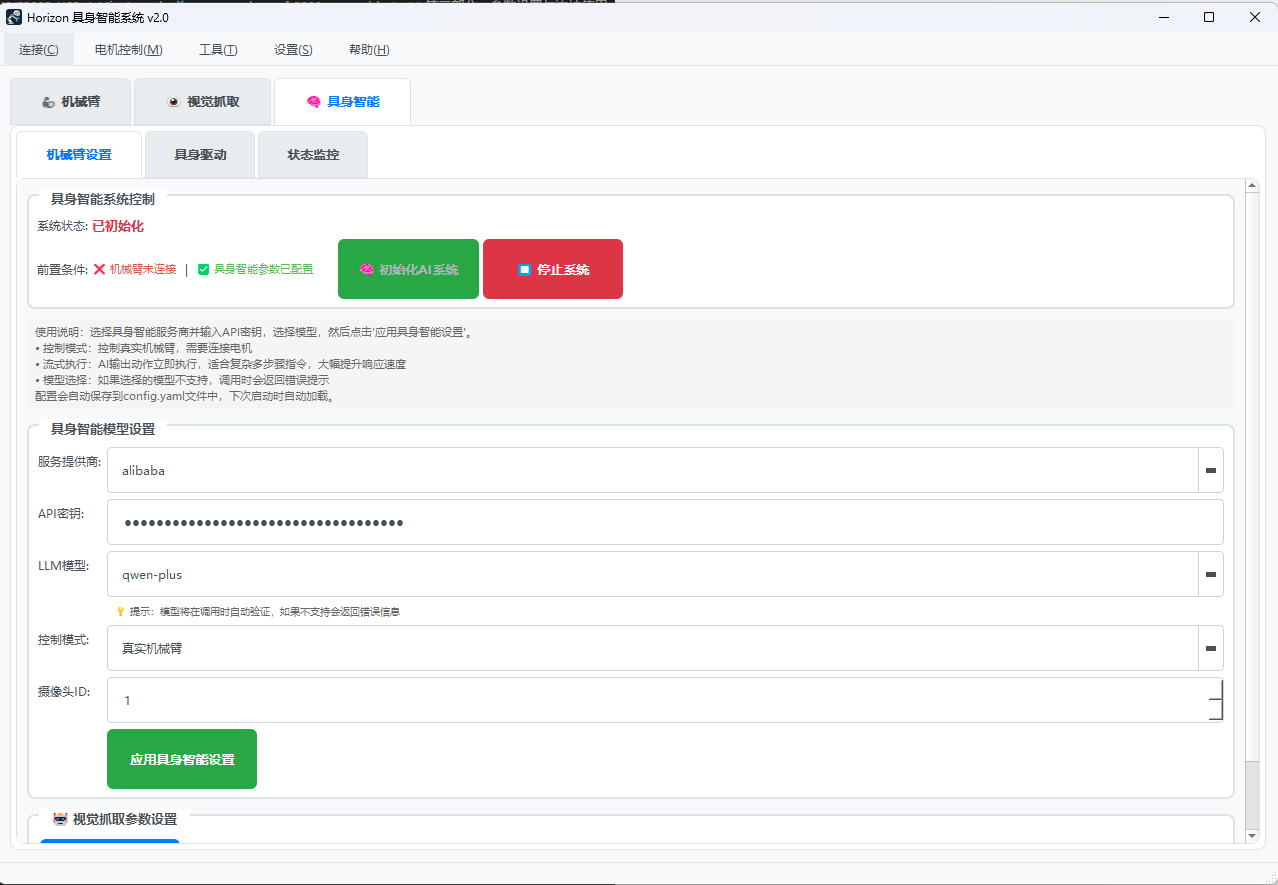
2.3 配置 AI 系统
- 点击具身智能界面
- 配置参数:
- 输入 LLM(大语言模型)的 API 地址和密钥
- 选择摄像头 ID(通常为 1,某些型号为 0)
- 点击初始化 AI 系统
- 进入具身驱动界面开始使用
2.4 语音控制操作
进入执行界面后,您将看到四个控制按钮:

操作方法:
| 功能 | 操作说明 |
|---|---|
| 执行命令 | 在文本框中输入命令并点击按钮执行 |
| 运行对话 | 类似录音功能: • 第一次点击:开始录音 • 第二次点击:结束录音 录音将发送给 LLM 处理,结果将显示在界面上,机械臂将根据指令执行动作 |
| 启用对话模式 | 机械臂进入持续监听状态。说出唤醒词**"Mark"**后,后续语音将被识别为命令并执行 |
技术支持和产品讨论
感谢您选择我们的产品!我们提供多种沟通渠道,确保您拥有流畅的产品体验。