如何在 reComputer 上使用 RoboSense速腾聚创3D雷达 LiDAR
简介
RoboSense速腾聚创3D雷达传感器为各种应用提供高精度的 3D 点云数据。本指南重点介绍如何在运行 ROS Noetic 的 reComputer J30/40 设备上设置 RS32 型号。
本文档提供了在 reComputer J30/40 Jetson 上使用 ROS 安装和设置 RoboSense LiDAR 的分步指南,并可视化点云数据。
前置条件
-
reComputer J30/40 系列:已完成 JetPack 5.x 系统安装 和 ROS Noetic 环境安装 的教程。
-
RoboSense 全系列 LiDAR

入门指南
安装 Robosense SDK
-
步骤 1: 安装基本依赖项
sudo apt-get update &&
sudo apt-get install -y libyaml-cpp-dev libpcap-dev -
步骤 2: 创建工作空间
mkdir -p catkin_ws/src
cd catkin_ws/src -
步骤 3: 克隆 rslidar_sdk
git clone https://github.com/RoboSense-LiDAR/rslidar_sdk.git
cd rslidar_sdk
git submodule init
git submodule update -
步骤 4: 打开位于 catkin_ws/src/rslidar_sdk/CMakeLists.txt 的 CMakeLists.txt 文件,并将文件顶部的变量 COMPILE_METHOD 修改为 CATKIN。

-
步骤 4: 删除位于 catkin_ws/src/rslidar_sdk/ 目录中的现有 package.xml 文件,并将 package_ros1.xml 文件重命名为 package.xml。

-
步骤 5: 在终端中输入以下命令
cd ~/catkin_ws/src/rslidar_sdk/
mkdir build && cd build
cmake .. && make -j4
cd ~/catkin_ws/
catkin_make
连接硬件
- 步骤 1: 按如下所述连接电源、Robosense RS32 LiDAR、接口盒和以太网线到 reComputer J4012:
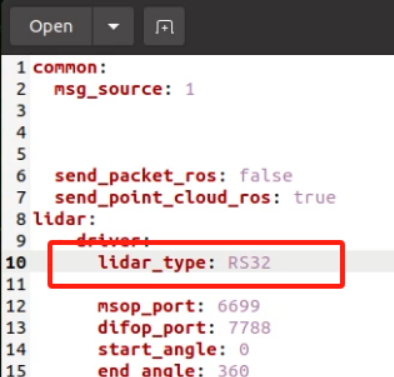
- 步骤 2: 打开位于 /catkin_ws/src/rslidar_sdk/config/config.yaml 的 config.yaml 文件,并将第 10 行的 lidar_type 修改为 RS32。保存文件并关闭。确保根据您的设备填写正确的 LiDAR 型号。
配置 reComputer IP 地址
Robosense RS32 LiDAR 的默认 IP 地址为 192.168.1.200,目标主机 IP 地址为 192.168.1.102,MSOP 数据包端口号为 6699,DIFOP 数据包端口号为 7788。连接硬件后,需要手动配置 reComputer 的 IP 地址。
-
步骤 1: 打开以太网设置。

-
步骤 2: 在 IPv4 字段中选择手动设置,并输入 IP 地址 192.168.1.102 和掩码 255.255.255.0。

ping 192.168.1.200
如果您从 LiDAR 接收到数据,则表示连接成功。
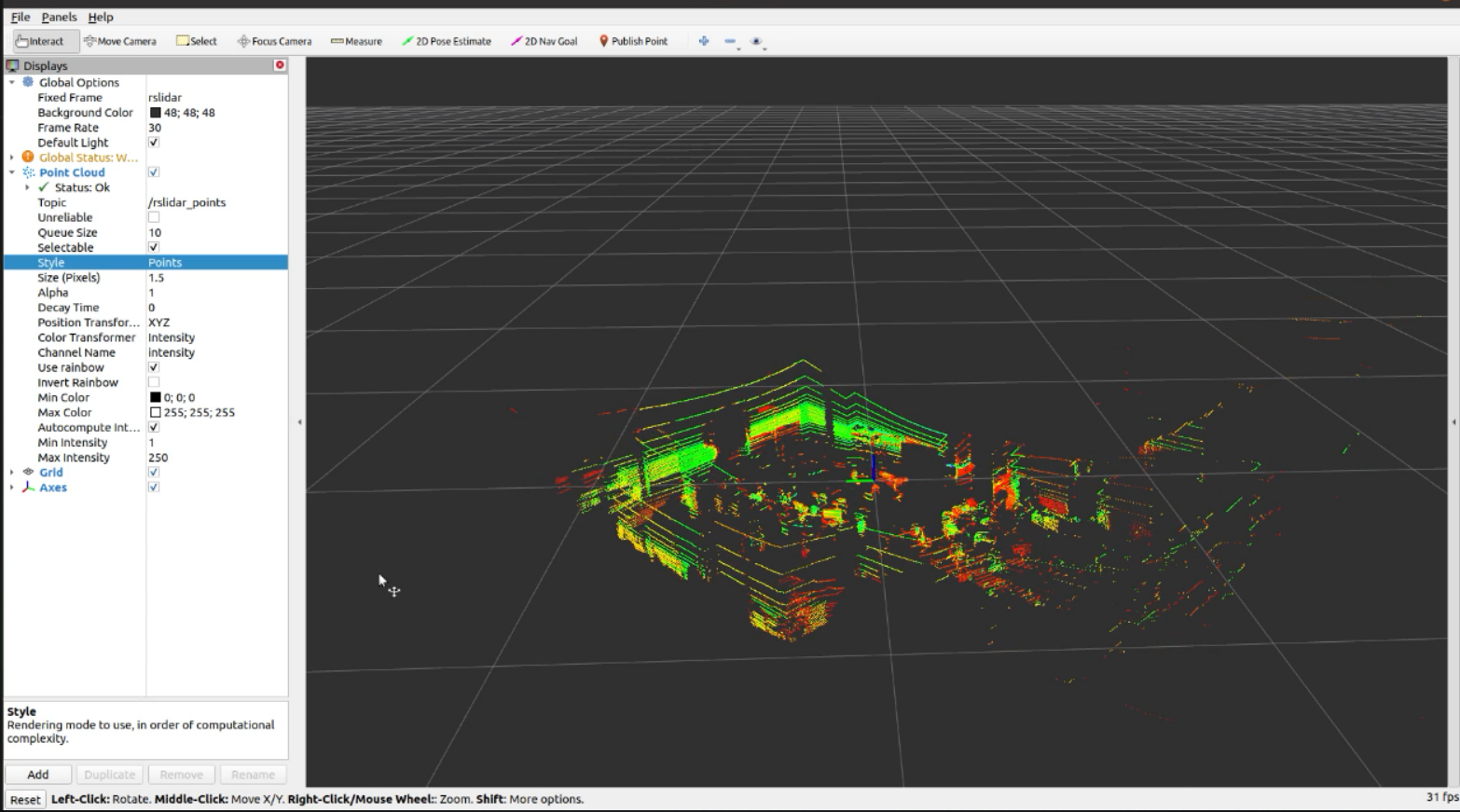
运行 LiDAR 代码
cd ~/catkin_ws/
source devel/setup.bash
roslaunch rslidar_sdk start.launch
技术支持与产品讨论
感谢您选择我们的产品!我们为您提供多种支持,以确保您使用我们的产品时体验顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。