振动异常检测

正如最小的病变可能导致致命疾病一样,最严重的工程灾难往往源于看似微不足道的异常。振动是一个关键指标——裂缝、堵塞、过载和磨损都会表现出不同的振动模式。
本教程介绍了振动异常检测套件。这是一个轻量级智能解决方案,旨在实时监控和识别异常振动模式。通过使用最少的训练数据学习设备的正常振动特征,它可以为机械故障提供早期预警。
1. 准备工作
在开始检测异常之前,请确保您已准备好以下硬件和软件环境。
硬件要求
该解决方案由 3 个硬件模块组成。
- MCU: Seeed Studio XIAO ESP32-S3(预焊接版)
- 扩展板: Grove Shield for Seeed Studio XIAO(内置电池管理)
- 传感器: Grove - 3 轴数字加速度计(LIS3DHTR)
- 线缆: 1 根 USB-C 数据线
- 目标对象: 具有一致规律振动的设备(例如电机、风扇)。
获取完整套件: XIAO ESP32-S3 振动异常检测套件
软件设置
- 打开浏览器并访问SenseCraft AI。
- 使用您的账户登录(如果没有账户请先注册)。
- 进入XIAO ESP32S3 Sense工作区并选择**"Vibration"**。
2. 分步指南
按照以下步骤训练您的设备识别"正常"振动并检测异常。
步骤 1:连接和初始化
- 组装: 通过 Grove Shield 将加速度计连接到 XIAO ESP32-S3。将传感器牢固地附着到您的目标对象上。
- 连接: 通过 USB 将 XIAO ESP32S3 插入您的计算机。在 SenseCraft AI 界面上点击**"Connect"**按钮。
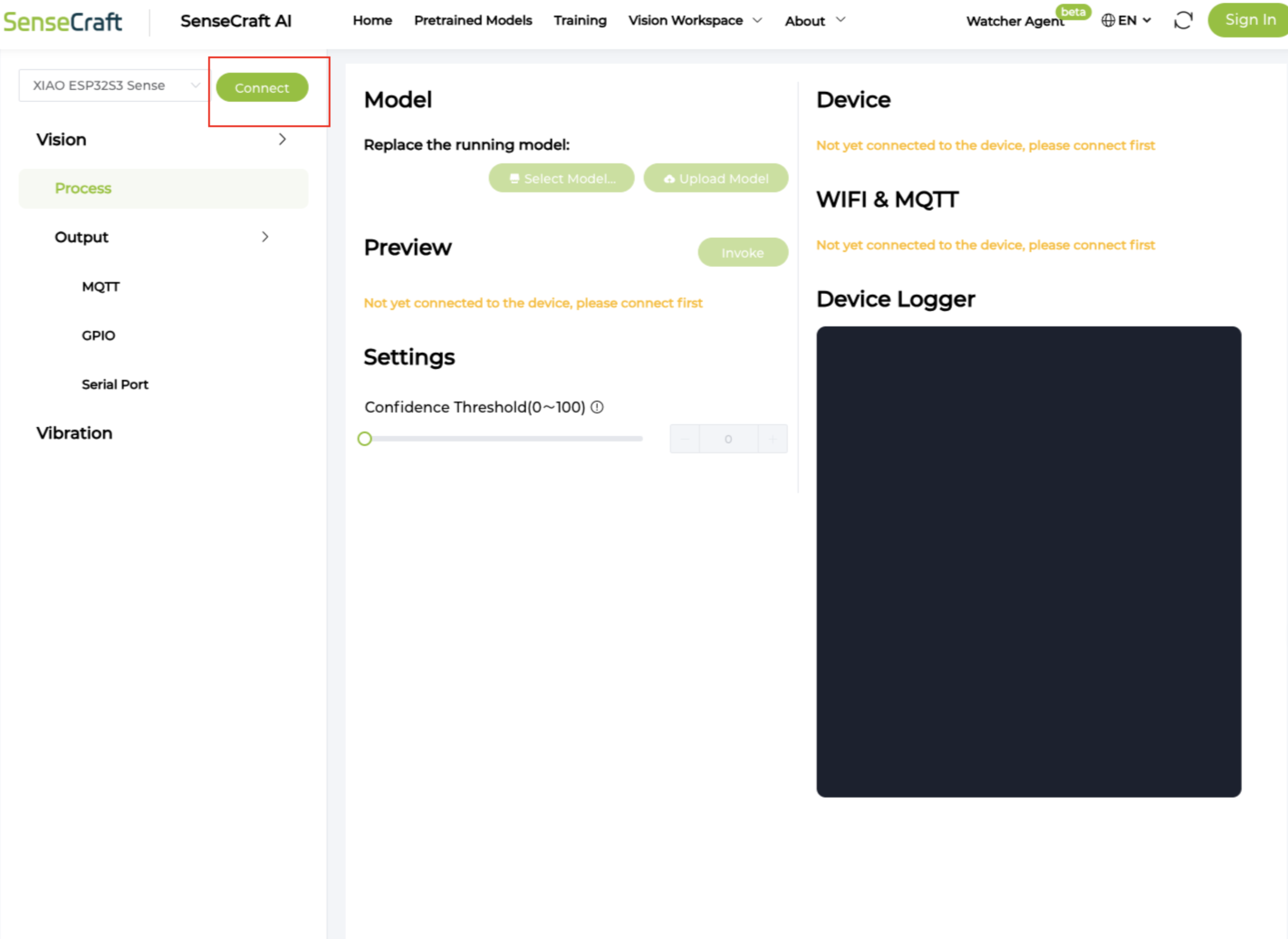
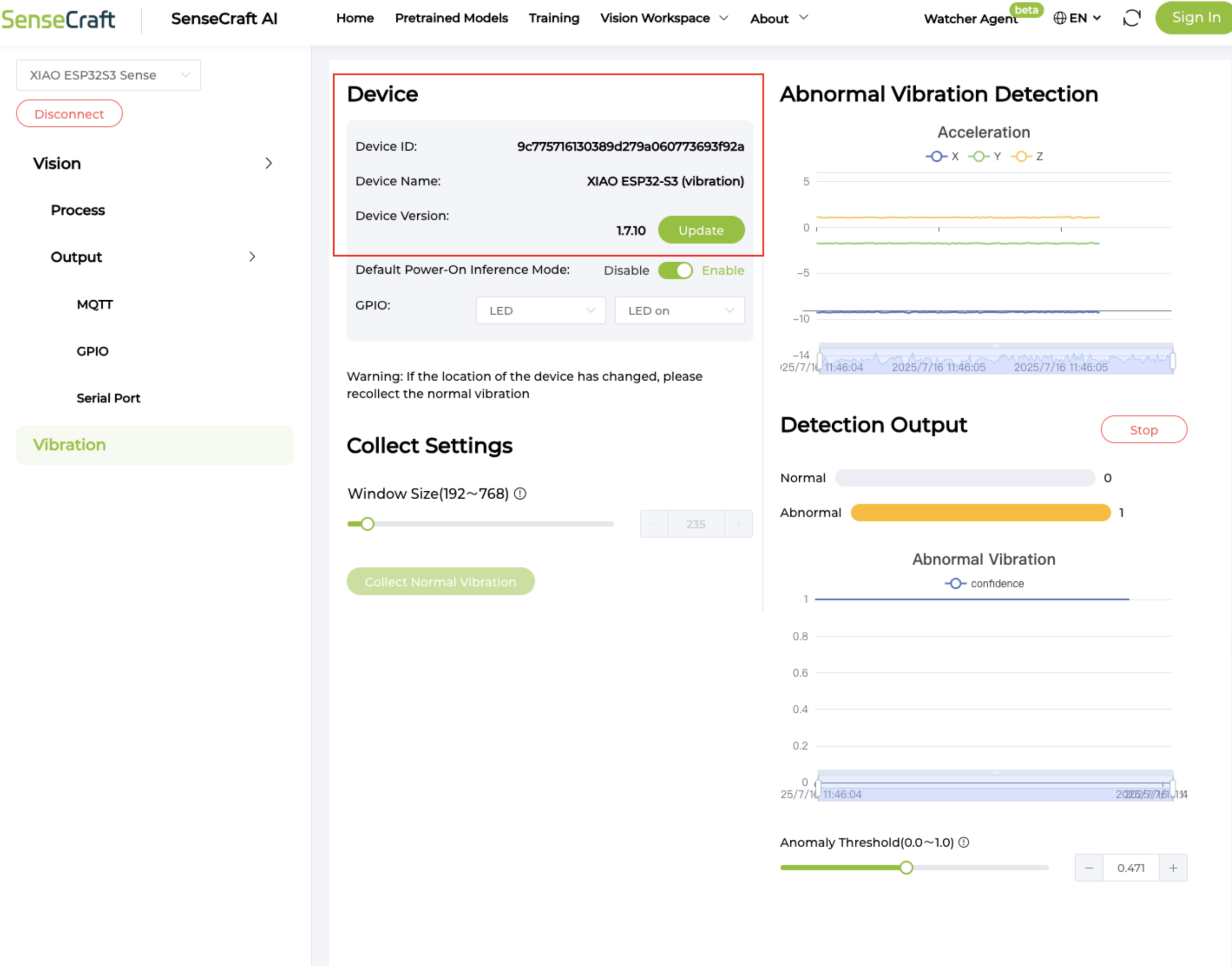
- 验证: 系统将显示设备信息。
- 注意: 如果固件不正确,请使用界面上的烧录按钮更新为振动异常检测(VAD)固件。
步骤 2:配置
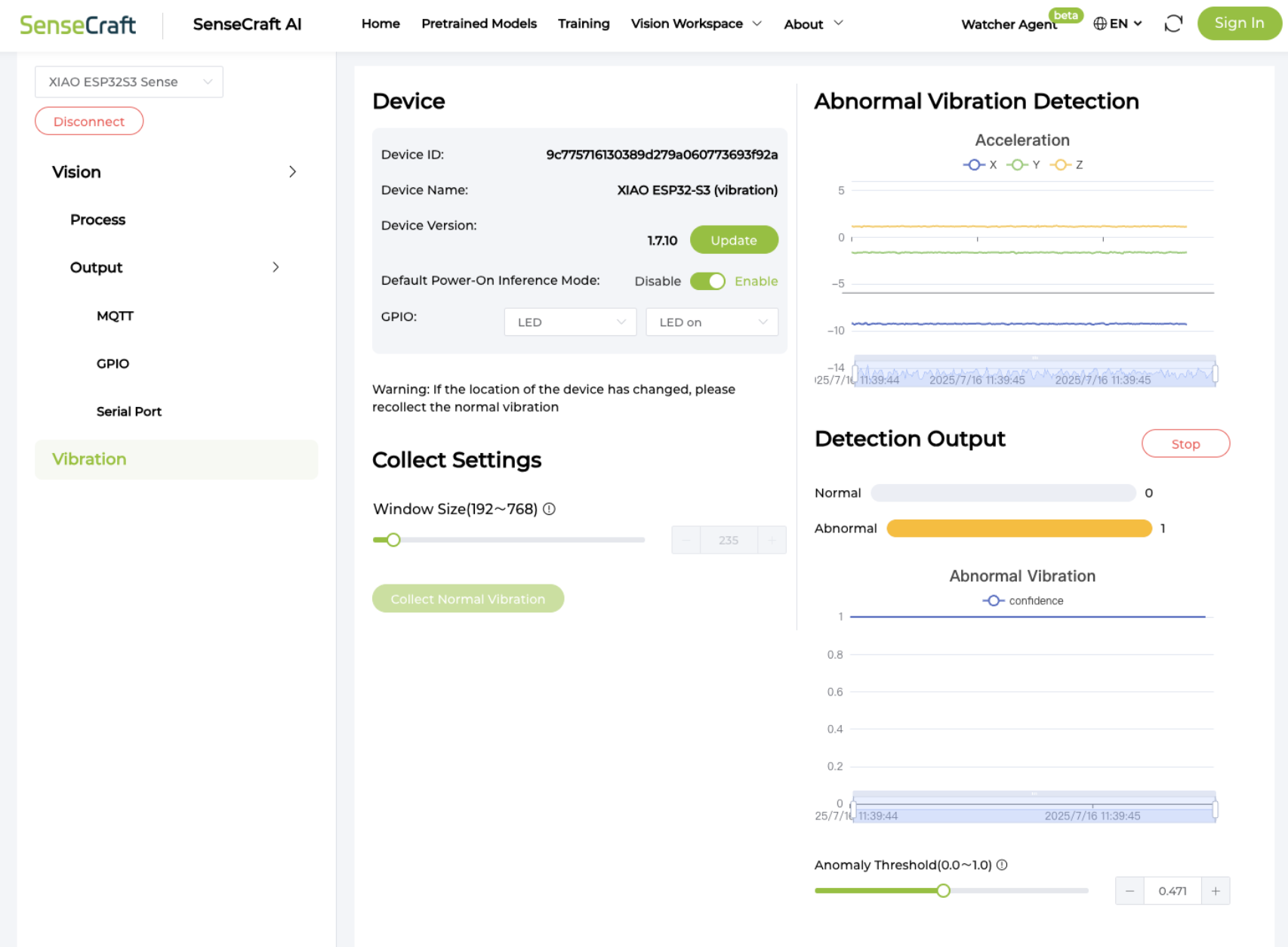
连接后,您将看到参数设置区域。
- Window Size: 默认为192。现在保持此默认值。
- 提示: 窗口太小可能导致学习不足,而窗口太大会增加推理时间。您可以稍后调整此参数。
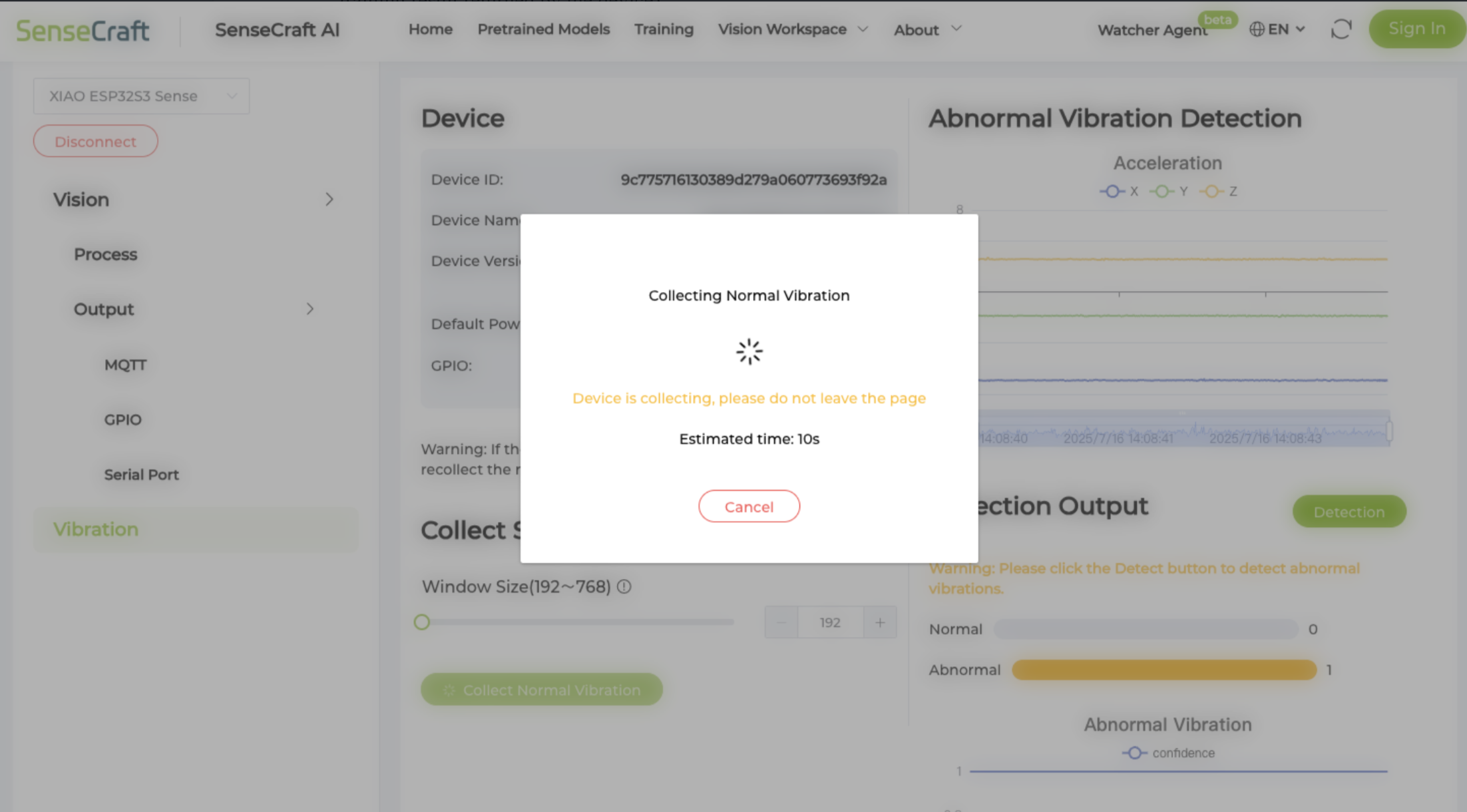
步骤 3:训练(收集正常数据)
设备需要学习什么是"正常"的感觉。
- 确保您的目标对象在其正常状态下运行。
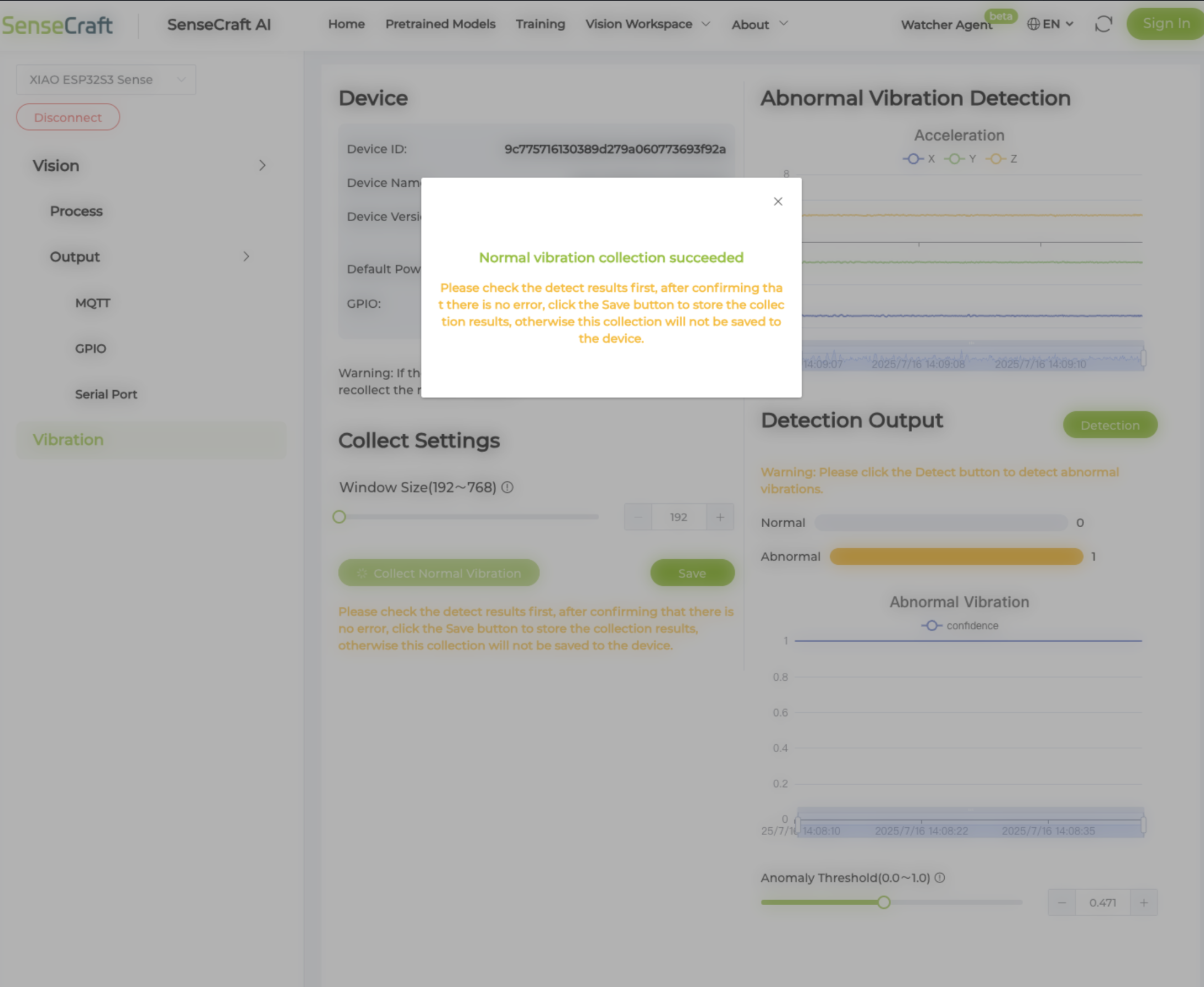
- 点击**"Collect Normal Vibration"**。
- 等待成功消息:"Normal vibration collection succeeded"。
- 点击**"Save"**。这会将模型存储到 MCU 的闪存中。
步骤 4:检测异常
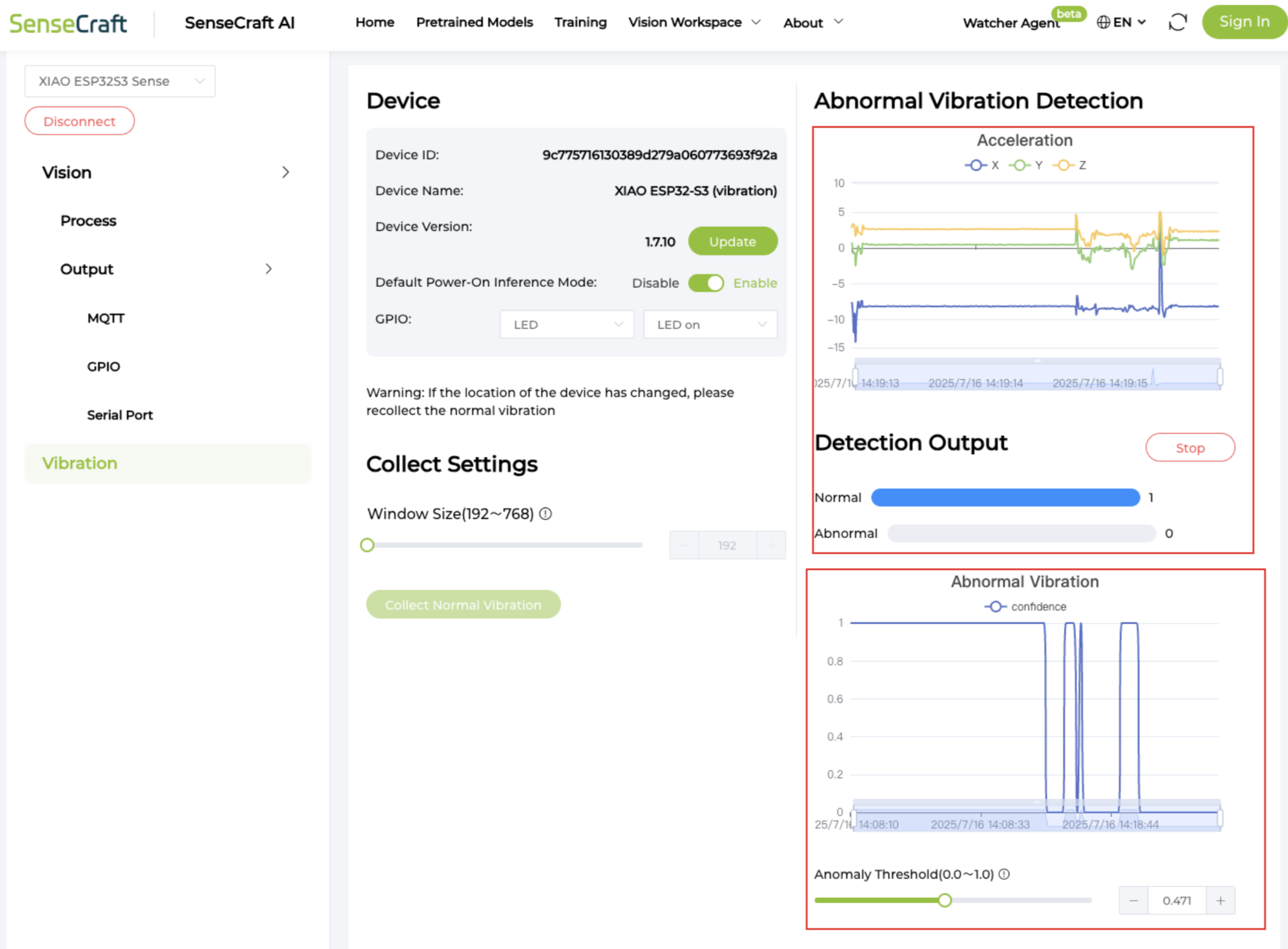
- 点击**"Detect"**开始实时监控。
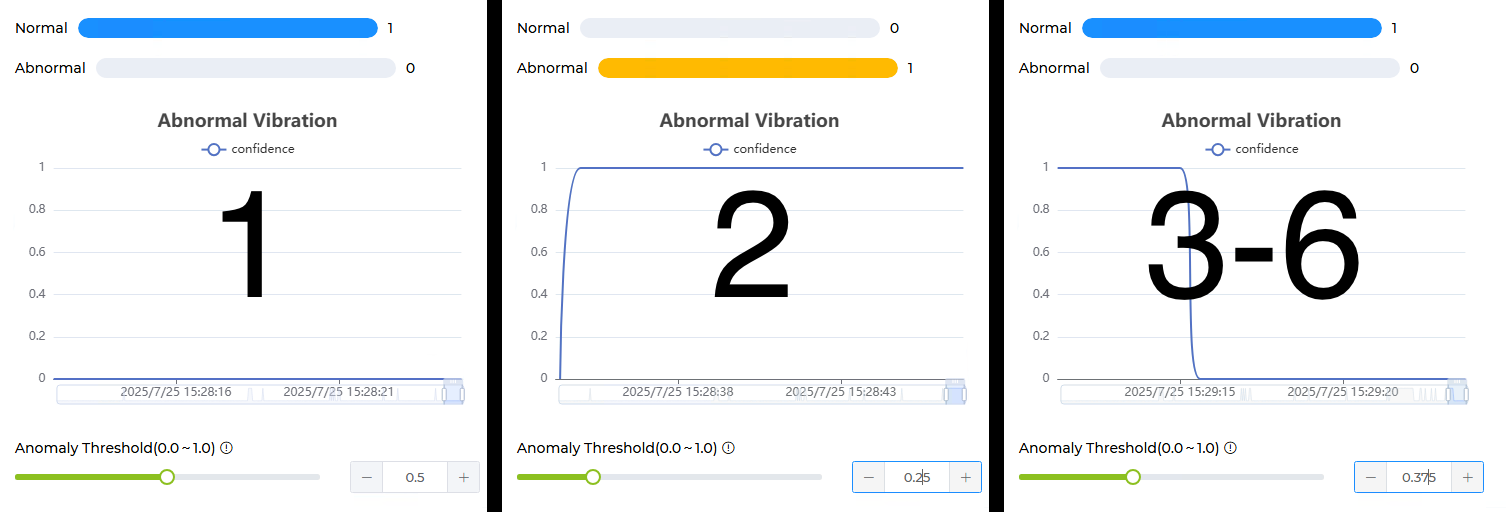
- 观察检测输出区域:
- Normal: 振动模式与学习的模型匹配。
- Abnormal: 检测到潜在异常(显示警报)。
步骤 5:部署和 GPIO
您可以配置设备在发生异常时触发外部硬件。
- 找到GPIO Configuration部分。
- 选择一个引脚(例如,Pin 21 上的 LED)并为异常状态设置有效电平。
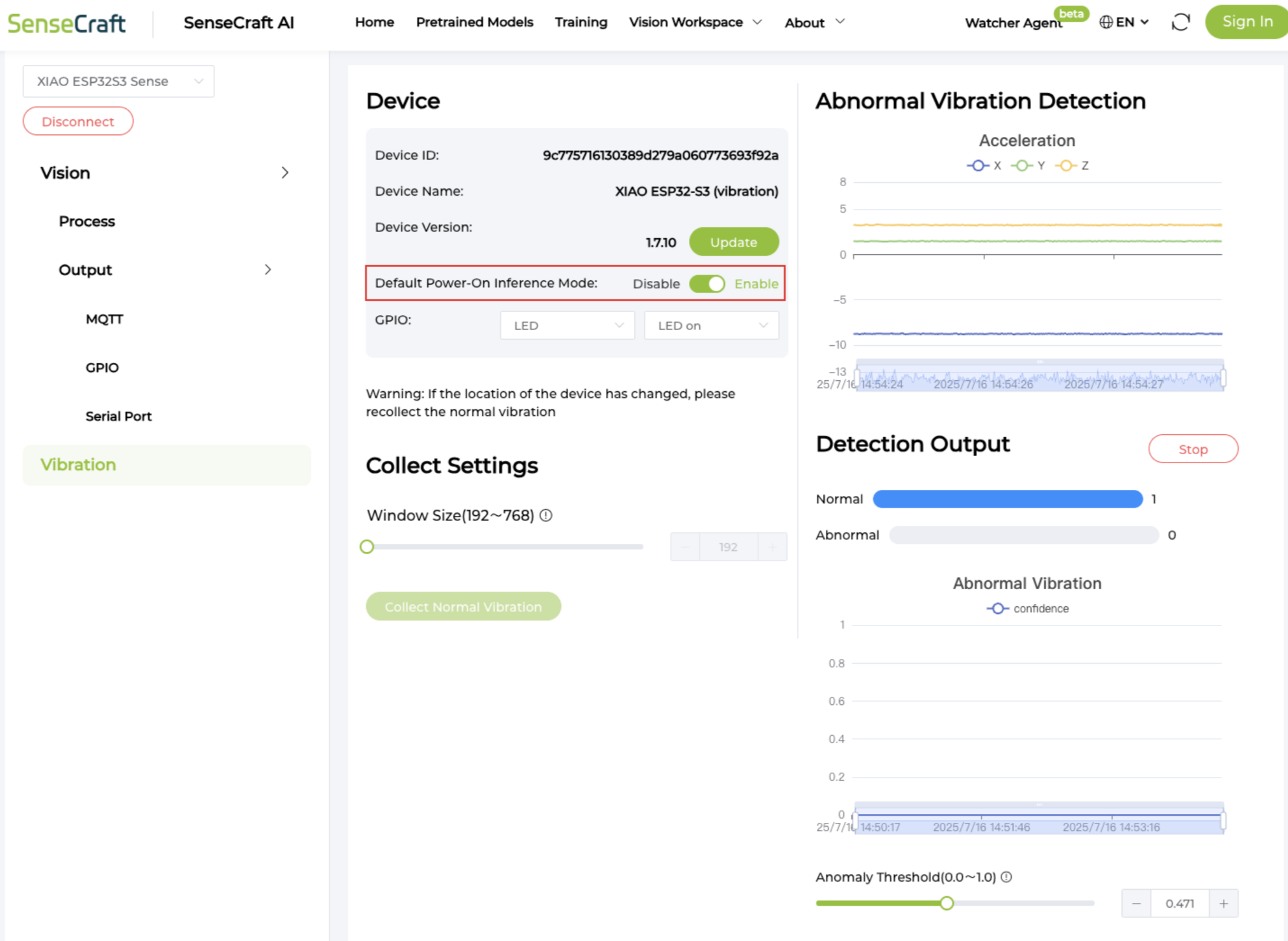
- 启用**"Default Power-On Inference Mode"**。这允许设备在电池供电时自动运行,无需计算机连接。
3. 参数调优指南
如果您发现检测过于敏感(误报)或不够敏感,您需要调整参数。
调优界面概览
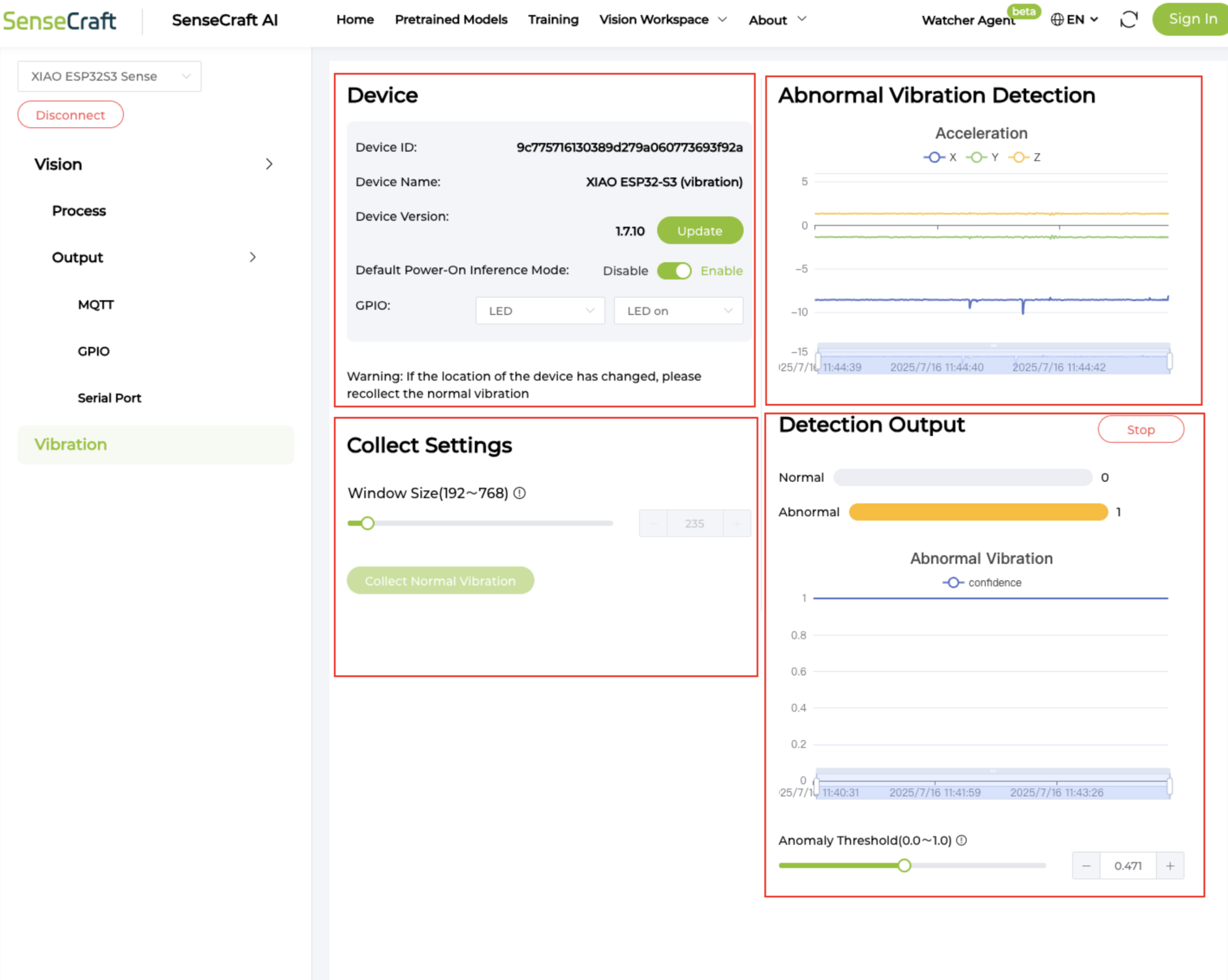
界面帮助您可视化数据:
- 设备信息: 顶部区域。
- 设置: 参数和收集设置。
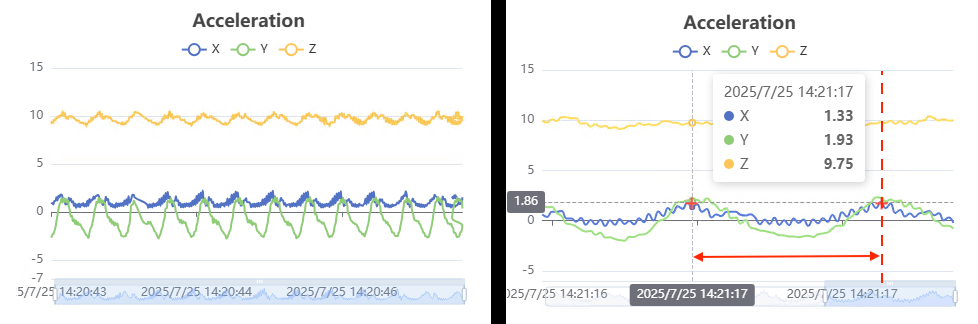
- 可视化: 实时波形(时间 vs 加速度)。
- 输出: 检测结果(0 表示正常,1 表示异常)。
关键参数
1. Window Size
定义一个分析"周期"的采样点数量。
- 默认: 192(在 100Hz 下约 1.92 秒)。
- 如何调整: 窗口必须覆盖至少一个完整的振动周期。使用波形图测量您机器振动的周期。如果机器振动缓慢,请增加 Window Size。
2. Anomaly Threshold
定义检测的敏感度。
- 范围: 0.0 到 1.0(默认:0.5)。
- 如何调整:
- 误报太多? 增加阈值(例如,到 0.6 或 0.7)。
- 漏检异常? 降低阈值(例如,到 0.3 或 0.4)。
4. 算法与原理
本节解释"Collect"和"Detect"按钮背后的技术。对于基本使用是可选的。
系统使用**陀螺仪欧几里得距离异常检测(GEDAD)**算法,适用于 3 轴加速度计。它包含两个阶段:
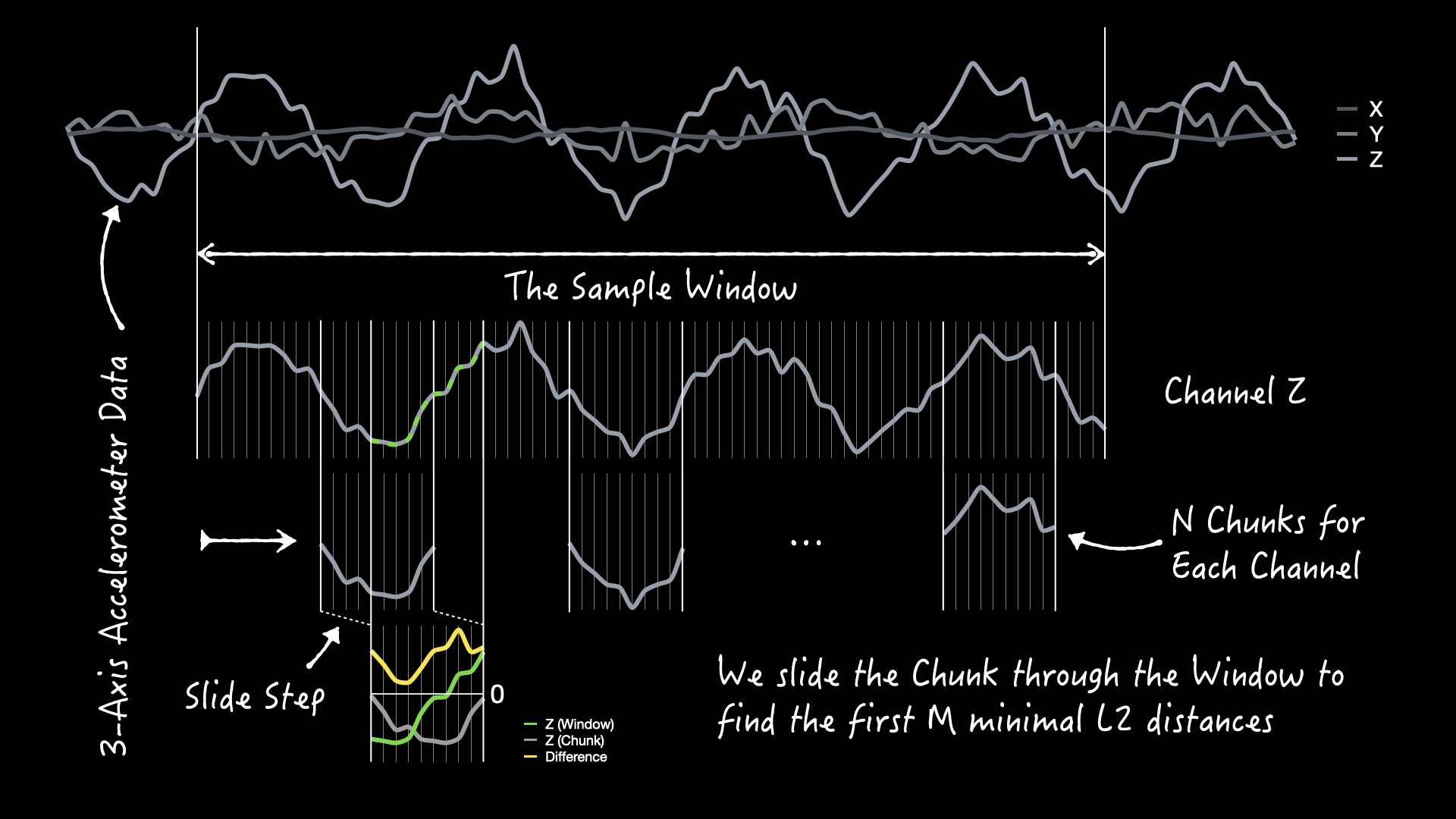
阶段 1:学习
算法建立正常振动的基线模板。
- 模板生成: 收集一组正常的 3 轴加速度数据。
- 阈值计算: 算法在模板上滑动数据"块",计算欧几里得(L2)距离。然后统计确定一个将正常变化与异常分离的阈值。
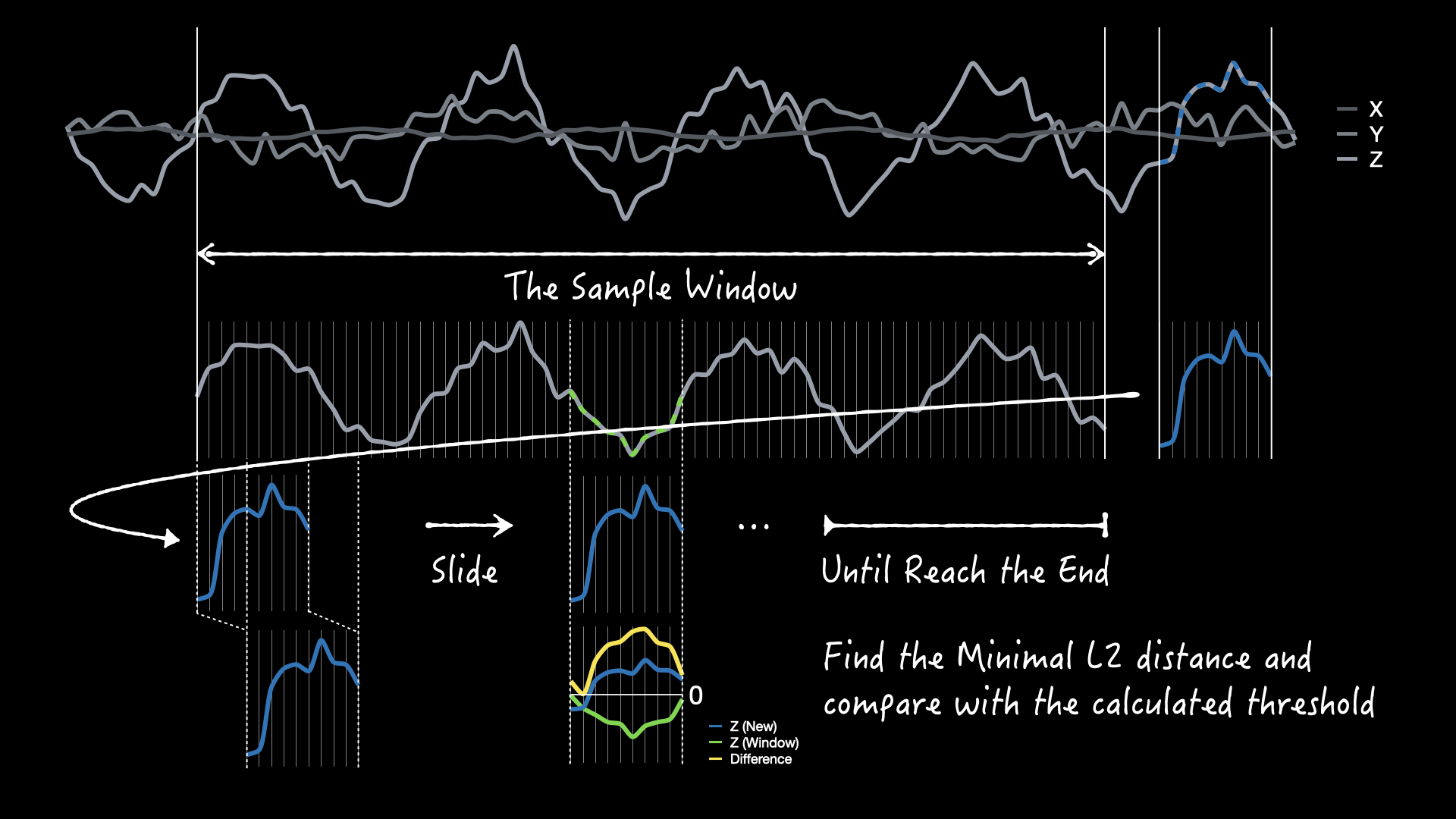
阶段 2:推理
在实时检测期间,传入数据与学习的模板进行比较。
- 如果实时数据相对于模板的欧几里得距离低于阈值,则为正常。
- 如果距离保持在阈值之上,则标记为异常。
优势:
- 训练速度快。
- 计算开销低(适合 ESP32S3)。
- 训练所需数据量少。
5. 应用场景
振动异常检测套件非常适合各个领域的预测性维护和安全监控:
- 工业: 泵、空气压缩机、风扇、电机、齿轮箱。
- 暖通空调: 制冷压缩机、冷却塔。
- 机器人: AGV/AMR 系统、农用拖拉机。
- 数据中心: 冷水机组、服务器冷却。
- 消费级: 洗衣机平衡警报、车库门机构。
开源与支持
源代码: GitHub - Seeed-Studio/AcousticsLab
我们的算法和固件是开源的。我们正在积极开发 WiFi + MQTT 报告和 FFT 分析等功能。欢迎提交Issue或Pull Request。
技术支持: