SENSING GMSL2 相机

我们提供不同的 GMSL2 相机,涵盖各种分辨率、传输速度等。这些相机可用于许多领域的应用。例如:
- 汽车
- ADAS + 视觉融合
- 高动态范围成像
- 自动驾驶
- 机器人技术
查看以下规格了解更多详情。
规格参数
该相机采用索尼 CMOS 图像传感器 ISX031 与 Maxim GMSL2 串行器 MAX96717F。配备汽车级传感器与精细调校的图像信号处理器(ISP),可输出卓越的图像质量;整机为 IP67 防护外壳,并配有在工厂完成对焦并胶合固定的 AA 镜头。
| 名称 | 参数 |
|---|---|
| 传感器 | SONY 2.95MP ISX031 RGGB |
| 图像信号处理器(ISP) | Built-in |
| 图像尺寸 | 1/2.42 inch CMOS |
| 输出像素 | 1920 H * 1536 V |
| 像素尺寸 | 3.0 um * 3.0 um |
| 帧率 | 1920 * 1536 @ 30fps |
| HDR 支持 | Yes |
| 抗频闪(LFM) | Yes |
| 输出数据 | YUV422@8bit |
| 串行器 | MAXIM MAX9295A |
| 相机接口 | GMSL2 |
| 供电 | 9~16V POC |
| 电流 | <200mA@12VDC |
| 连接器 | Amphenol Fakra (Z Code) |
| 工作温度范围 | -40 ~ 85℃ |
| 尺寸 | W:25mm, L:25mm, H:18.6mm |
| 重量 | <50g |
硬件设置
| 类别 | 规格 | 参数 |
|---|---|---|
| 串行器 | 型号 | MAX9295A |
| I2C 地址 | 0x80 (8 bit address) | |
| 速率 | GMSL2 (6G bps) | |
| 图像信号处理器(ISP) | 型号 | ISX031 |
| I2C 地址 | 0x34 (8 bit address) | |
| 帧同步 | Controlled by MAX9295A MFP7 | |
| 复位 | Controlled by MAX9295A MFP0 |
入门指南
我们将使用 reComputer Robotics J4012 进行演示,您可能需要
- SENSING GMSL2 相机
- Mini-Fakra 线缆
- reComputer Robotics GMSL2 扩展板
设置设备
将 Mini Fakra 线缆与相机连接,reComputer Robotics J30/J40 上有 4 个通道,我们使用了 SG3S-ISX031C-GMSL2-F 相机,它连接到 '1' 通道(丝印字母 'B')。
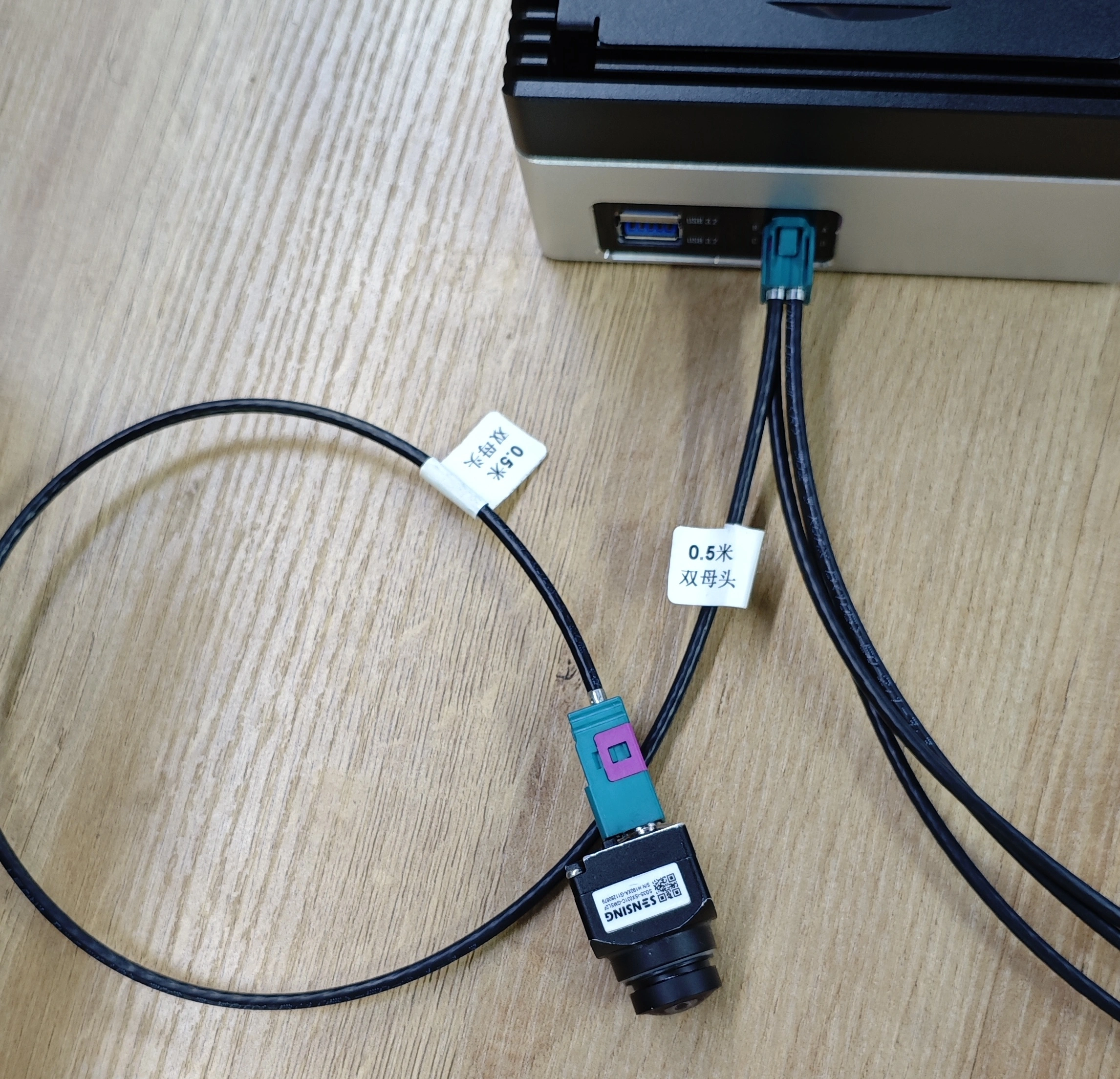
在开始之前,让我们熟悉一下这 4 个通道,因为我们稍后在配置过程中会用到它们。

这 4 个通道在设备上标记为 'A'、'B'、'C' 和 'D', 我们建议客户按照给定的字母顺序连接相机, 在这种情况下,您的视频设备将相应地映射为 Jetson Linux 上的 '/dev/video0'、'/dev/video1'、'/dev/video2'、'/dev/video3'。
但如果您只连接了一个相机,则只会显示 'video0'。
接下来,我们将使用 Jetson IO 配置设备树覆盖层以启用我们的设备(在配置并重启之前,您不会在 '/dev' 文件夹下看到视频节点)。
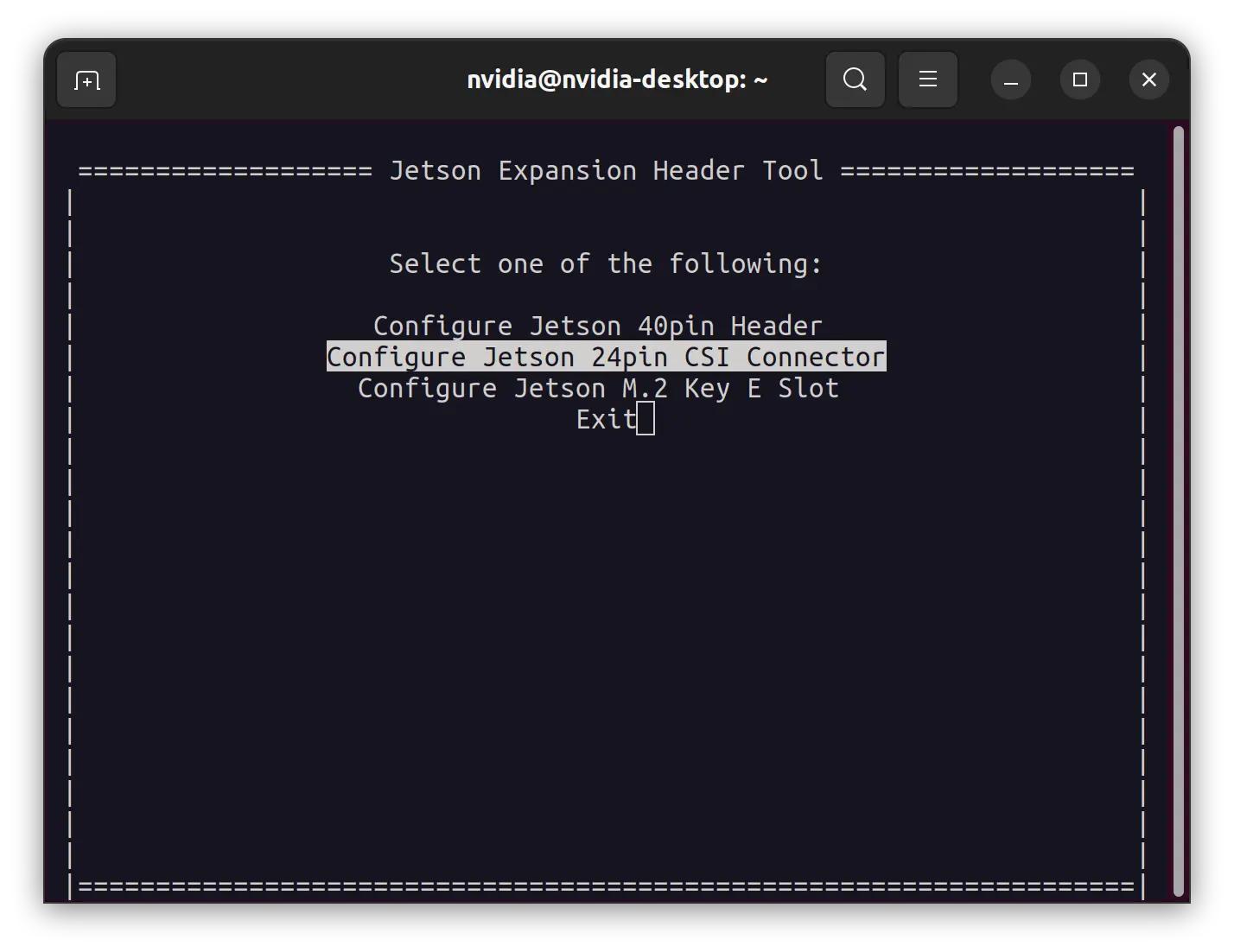
配置 Jetson IO
使用以下命令启动 JetsonIO
sudo /opt/nvidia/jetson-io/jetson-io.py
按照以下步骤逐步进行配置
在上述步骤中,如果您使用的是 6Gbps 相机,请在步骤 3 中选择 'Seeed GMSL 1X4 6G' 覆盖层。6Gbps 相机包括:
- SG3S-ISX031C-GMSL2-H
- SG8S-AR0820C-5300-G2A-H
- SG2-IMX390C-5200-G2A-H
- SG2-AR0233C-5200-G2A-H
配置视频信息
如果您尚未安装 v4l-utils
sudo apt-get update
sudo apt-get install v4l-utils -y
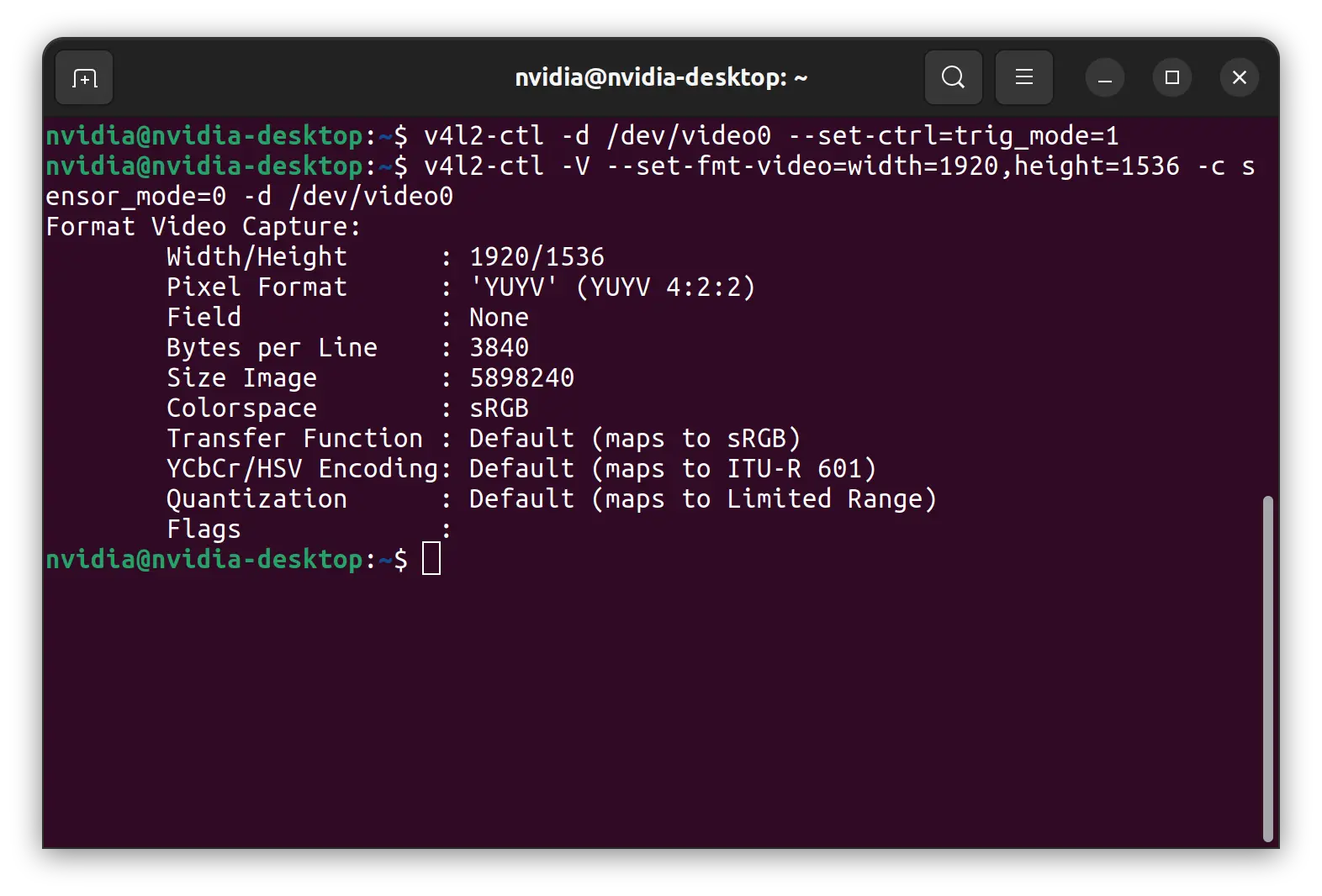
- 帧同步
v4l2-ctl -d /dev/video0 --set-ctrl=trig_mode=1
您可以切换 'trig_mode=0' 来禁用帧同步。或者在连接多个相机时使用 'trig_mode=1' 来启用帧同步。
- 视频格式
v4l2-ctl -V --set-fmt-video=width=1920,height=1536 -c sensor_mode=0 -d /dev/video0
根据您使用的相机,可能有不同的预定义 'sensor_mode',主要包括:
| 传感器模式 | 帧类型 |
|---|---|
| 0 | YUYV8_1X16/1920x1536 |
| 1 | YUYV8_1X16/1920x1080 |
| 2 | YUYV8_1X16/3840x2160 |
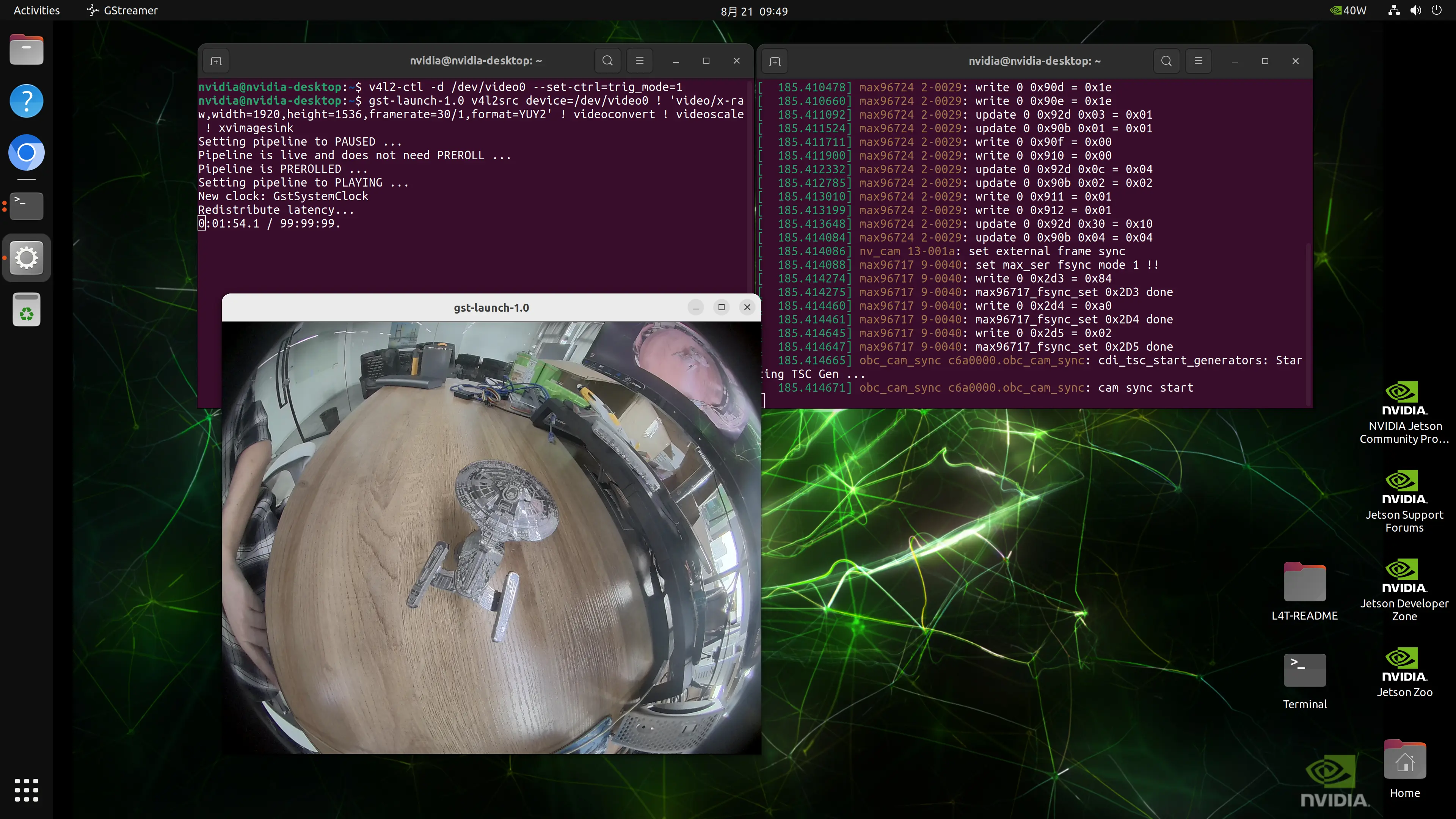
Gst 启动
使用 gst-launch-1.0 启动查看器
gst-launch-1.0 v4l2src device=/dev/video0 ! \
video/x-raw,format=YUY2,width=1920,height=1080,framerate=30/1 ! \
videoconvert ! videoscale ! xvimagesink
其他资源
数据手册
- SG3S-ISX031C-GMSL2-F
- SG3S-ISX031C-GMSL2-H
- SG8S-AR0820C-5300-G2A-H
- SG2-AR0233C-5200-G2A-H
- SG2-IMX390C-5200-G2A-H
技术支持与产品讨论
感谢您选择我们的产品!请确保在以下平台关注我们,以获取最新消息和支持。
