Lekiwi声音追踪
简介
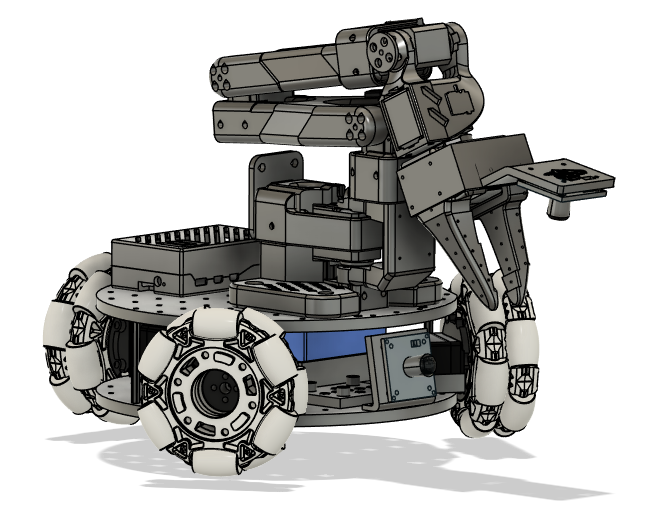
Lekiwi机器人套件结合ReSpeaker Mic Array v2.0,获得了语音交互和声音导航功能。本指南详细介绍了配置机器人的硬件和软件环境以实现声音追踪功能的逐步过程。


硬件准备
- Lekiwi 机器人套件
- ReSpeaker 麦克风阵列 v2.0
考虑到未来功能扩展,本wiki使用reComputer Jetson Mini J4012作为机器人的主控设备。您也可以使用Raspberry Pi 5实现本维基中描述的所有功能。
硬件连接
- 请参考此维基 准备Lekiwi机器人,包括机械结构的组装和电机的配置。
- 使用3D打印的连接器将reSpeaker安装到Lekiwi上。
- 使用USB线将reSpeaker和伺服控制器连接到reComputer。

软件准备环境
Lerobot 虚拟环境
如果您在Lekiwi组装过程中已经在您的reComputer上设置了Lerobot虚拟环境,您可以跳至下一节。
否则,您需要使用以下命令配置Lerobot虚拟环境:
步骤1. 安装Miniconda
mkdir -p ~/miniconda3
wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-aarch64.sh -O ~/miniconda3/miniconda.sh
bash ~/miniconda3/miniconda.sh -b -u -p ~/miniconda3
rm ~/miniconda3/miniconda.sh
source ~/.bashrc
步骤2. 为lerobot创建conda环境
conda create -y -n lerobot python=3.10
conda activate lerobot
git clone https://github.com/huggingface/lerobot.git ~/lerobot
conda install ffmpeg -c conda-forge
cd ~/lerobot && pip install -e ".[feetech]"
reSpeaker 依赖项
在 lerobot 虚拟环境中安装 reSpeaker 的依赖项。
步骤1. 安装 pyusb
pip install pyusb==1.0.2
步骤2. 配置USB设备访问权限。
echo 'SUBSYSTEM=="usb", ATTRS{idVendor}=="2886", MODE="0666"' | sudo tee /etc/udev/rules.d/51-mic-usb.rules
sudo chmod +x /etc/udev/rules.d/51-mic-usb.rules
sudo udevadm control --reload-rules && sudo udevadm trigger
部署应用程序软件
转到 lerobot/lerobot/common/robots/lekiwi 目录,并在此位置创建一个名为 sound_follow.py 的新Python脚本。
然后,将以下内容复制到 sound_follow.py 中。
sound_follow.py
#!/usr/bin/env python3
import logging
import time
import sys
import struct
import usb.core
import usb.util
from .config_lekiwi import LeKiwiConfig
from .lekiwi import LeKiwi
class Tuning:
TIMEOUT = 100000
def __init__(self, dev):
self.dev = dev
self.PARAMETERS = {
'AECFREEZEONOFF': (18, 7, 'int', 1, 0, 'rw', 'Adaptive Echo Canceler updates inhibit.', '0 = Adaptation enabled', '1 = Freeze adaptation, filter only'),
'AECNORM': (18, 19, 'float', 16, 0.25, 'rw', 'Limit on norm of AEC filter coefficients'),
'AECPATHCHANGE': (18, 25, 'int', 1, 0, 'ro', 'AEC Path Change Detection.', '0 = false (no path change detected)', '1 = true (path change detected)'),
'RT60': (18, 26, 'float', 0.9, 0.25, 'ro', 'Current RT60 estimate in seconds'),
'HPFONOFF': (18, 27, 'int', 3, 0, 'rw', 'High-pass Filter on microphone signals.', '0 = OFF', '1 = ON - 70 Hz cut-off', '2 = ON - 125 Hz cut-off', '3 = ON - 180 Hz cut-off'),
'RT60ONOFF': (18, 28, 'int', 1, 0, 'rw', 'RT60 Estimation for AES. 0 = OFF 1 = ON'),
'AECSILENCELEVEL': (18, 30, 'float', 1, 1e-09, 'rw', 'Threshold for signal detection in AEC [-inf .. 0] dBov (Default: -80dBov = 10log10(1x10-8))'),
'AECSILENCEMODE': (18, 31, 'int', 1, 0, 'ro', 'AEC far-end silence detection status. ', '0 = false (signal detected) ', '1 = true (silence detected)'),
'AGCONOFF': (19, 0, 'int', 1, 0, 'rw', 'Automatic Gain Control. ', '0 = OFF ', '1 = ON'),
'AGCMAXGAIN': (19, 1, 'float', 1000, 1, 'rw', 'Maximum AGC gain factor. ', '[0 .. 60] dB (default 30dB = 20log10(31.6))'),
'AGCDESIREDLEVEL': (19, 2, 'float', 0.99, 1e-08, 'rw', 'Target power level of the output signal. ', '[-inf .. 0] dBov (default: -23dBov = 10log10(0.005))'),
'AGCGAIN': (19, 3, 'float', 1000, 1, 'rw', 'Current AGC gain factor. ', '[0 .. 60] dB (default: 0.0dB = 20log10(1.0))'),
'AGCTIME': (19, 4, 'float', 1, 0.1, 'rw', 'Ramps-up / down time-constant in seconds.'),
'CNIONOFF': (19, 5, 'int', 1, 0, 'rw', 'Comfort Noise Insertion.', '0 = OFF', '1 = ON'),
'FREEZEONOFF': (19, 6, 'int', 1, 0, 'rw', 'Adaptive beamformer updates.', '0 = Adaptation enabled', '1 = Freeze adaptation, filter only'),
'STATNOISEONOFF': (19, 8, 'int', 1, 0, 'rw', 'Stationary noise suppression.', '0 = OFF', '1 = ON'),
'GAMMA_NS': (19, 9, 'float', 3, 0, 'rw', 'Over-subtraction factor of stationary noise. min .. max attenuation'),
'MIN_NS': (19, 10, 'float', 1, 0, 'rw', 'Gain-floor for stationary noise suppression.', '[-inf .. 0] dB (default: -16dB = 20log10(0.15))'),
'NONSTATNOISEONOFF': (19, 11, 'int', 1, 0, 'rw', 'Non-stationary noise suppression.', '0 = OFF', '1 = ON'),
'GAMMA_NN': (19, 12, 'float', 3, 0, 'rw', 'Over-subtraction factor of non- stationary noise. min .. max attenuation'),
'MIN_NN': (19, 13, 'float', 1, 0, 'rw', 'Gain-floor for non-stationary noise suppression.', '[-inf .. 0] dB (default: -10dB = 20log10(0.3))'),
'ECHOONOFF': (19, 14, 'int', 1, 0, 'rw', 'Echo suppression.', '0 = OFF', '1 = ON'),
'GAMMA_E': (19, 15, 'float', 3, 0, 'rw', 'Over-subtraction factor of echo (direct and early components). min .. max attenuation'),
'GAMMA_ETAIL': (19, 16, 'float', 3, 0, 'rw', 'Over-subtraction factor of echo (tail components). min .. max attenuation'),
'GAMMA_ENL': (19, 17, 'float', 5, 0, 'rw', 'Over-subtraction factor of non-linear echo. min .. max attenuation'),
'NLATTENONOFF': (19, 18, 'int', 1, 0, 'rw', 'Non-Linear echo attenuation.', '0 = OFF', '1 = ON'),
'NLAEC_MODE': (19, 20, 'int', 2, 0, 'rw', 'Non-Linear AEC training mode.', '0 = OFF', '1 = ON - phase 1', '2 = ON - phase 2'),
'SPEECHDETECTED': (19, 22, 'int', 1, 0, 'ro', 'Speech detection status.', '0 = false (no speech detected)', '1 = true (speech detected)'),
'FSBUPDATED': (19, 23, 'int', 1, 0, 'ro', 'FSB Update Decision.', '0 = false (FSB was not updated)', '1 = true (FSB was updated)'),
'FSBPATHCHANGE': (19, 24, 'int', 1, 0, 'ro', 'FSB Path Change Detection.', '0 = false (no path change detected)', '1 = true (path change detected)'),
'TRANSIENTONOFF': (19, 29, 'int', 1, 0, 'rw', 'Transient echo suppression.', '0 = OFF', '1 = ON'),
'VOICEACTIVITY': (19, 32, 'int', 1, 0, 'ro', 'VAD voice activity status.', '0 = false (no voice activity)', '1 = true (voice activity)'),
'STATNOISEONOFF_SR': (19, 33, 'int', 1, 0, 'rw', 'Stationary noise suppression for ASR.', '0 = OFF', '1 = ON'),
'NONSTATNOISEONOFF_SR': (19, 34, 'int', 1, 0, 'rw', 'Non-stationary noise suppression for ASR.', '0 = OFF', '1 = ON'),
'GAMMA_NS_SR': (19, 35, 'float', 3, 0, 'rw', 'Over-subtraction factor of stationary noise for ASR. ', '[0.0 .. 3.0] (default: 1.0)'),
'GAMMA_NN_SR': (19, 36, 'float', 3, 0, 'rw', 'Over-subtraction factor of non-stationary noise for ASR. ', '[0.0 .. 3.0] (default: 1.1)'),
'MIN_NS_SR': (19, 37, 'float', 1, 0, 'rw', 'Gain-floor for stationary noise suppression for ASR.', '[-inf .. 0] dB (default: -16dB = 20log10(0.15))'),
'MIN_NN_SR': (19, 38, 'float', 1, 0, 'rw', 'Gain-floor for non-stationary noise suppression for ASR.', '[-inf .. 0] dB (default: -10dB = 20log10(0.3))'),
'GAMMAVAD_SR': (19, 39, 'float', 1000, 0, 'rw', 'Set the threshold for voice activity detection.', '[-inf .. 60] dB (default: 3.5dB 20log10(1.5))'),
# 'KEYWORDDETECT': (20, 0, 'int', 1, 0, 'ro', 'Keyword detected. Current value so needs polling.'),
'DOAANGLE': (21, 0, 'int', 359, 0, 'ro', 'DOA angle. Current value. Orientation depends on build configuration.')
}
def write(self, name, value):
try:
data = self.PARAMETERS[name]
except KeyError:
return
if data[5] == 'ro':
raise ValueError('{} is read-only'.format(name))
id = data[0]
# 4 bytes offset, 4 bytes value, 4 bytes type
if data[2] == 'int':
payload = struct.pack(b'iii', data[1], int(value), 1)
else:
payload = struct.pack(b'ifi', data[1], float(value), 0)
self.dev.ctrl_transfer(
usb.util.CTRL_OUT | usb.util.CTRL_TYPE_VENDOR | usb.util.CTRL_RECIPIENT_DEVICE,
0, 0, id, payload, self.TIMEOUT)
def read(self, name):
try:
data = self.PARAMETERS[name]
except KeyError:
return
id = data[0]
cmd = 0x80 | data[1]
if data[2] == 'int':
cmd |= 0x40
length = 8
response = self.dev.ctrl_transfer(
usb.util.CTRL_IN | usb.util.CTRL_TYPE_VENDOR | usb.util.CTRL_RECIPIENT_DEVICE,
0, cmd, id, length, self.TIMEOUT)
# response = struct.unpack(b'ii', response.tostring())
response = struct.unpack(b'ii', response.tobytes() if sys.version_info[1]>=2 else response.tostring())
if data[2] == 'int':
result = response[0]
else:
result = response[0] * (2.**response[1])
return result
def set_vad_threshold(self, db):
self.write('GAMMAVAD_SR', db)
def is_voice(self):
return self.read('VOICEACTIVITY')
@property
def direction(self):
return self.read('DOAANGLE')
@property
def version(self):
return self.dev.ctrl_transfer(
usb.util.CTRL_IN | usb.util.CTRL_TYPE_VENDOR | usb.util.CTRL_RECIPIENT_DEVICE,
0, 0x80, 0, 1, self.TIMEOUT)[0]
def close(self):
"""
close the interface
"""
usb.util.dispose_resources(self.dev)
class SoundFollowingRobot:
def __init__(self):
logging.info("Configuring LeKiwi")
self.robot = LeKiwi(LeKiwiConfig())
logging.info("Connecting LeKiwi")
self.robot.connect(False)
# scale factor
self.scale_factor = 2
self.angle_threshold = 5.0
self.mic = self.find()
def find(self, vid=0x2886, pid=0x0018):
dev = usb.core.find(idVendor=vid, idProduct=pid)
if not dev:
return
return Tuning(dev)
def get_sound_direction(self):
return self.mic.read("DOAANGLE")
def robot_turn(self, speed):
data = {'x.vel': 0.0, 'y.vel': 0.0, 'theta.vel': int(speed/self.scale_factor)}
_action_sent = self.robot.send_action(data)
def run(self):
try:
self.mic.set_vad_threshold(5)
while True:
if robot.mic.is_voice():
sound_angle = self.get_sound_direction()
angle_diff = sound_angle - 90
if angle_diff > 180:
angle_diff -= 360
elif angle_diff < -180:
angle_diff += 360
if abs(angle_diff) < self.angle_threshold:
self.robot_turn(0)
else:
self.robot_turn(angle_diff)
print(f"voice angle: {sound_angle}")
else:
print('No voice detected!')
time.sleep(0.2)
except KeyboardInterrupt:
print("Finish")
except Exception as e:
print(f"Exception occurred: {e}")
finally:
self.close()
def close(self):
self.robot_turn(0)
self.robot.disconnect()
self.mic.close()
if __name__ == "__main__":
robot = SoundFollowingRobot()
robot.run()
由于我们的硬件设置不使用摄像头或SOArm101机器人手臂,我们需要注释掉相关的配置。
lerobot/lerobot/common/robots/lekiwi/config_lekiwi.py
...
def lekiwi_cameras_config() -> dict[str, CameraConfig]:
return {
# "front": OpenCVCameraConfig(
# index_or_path="/dev/video0", fps=30, width=640, height=480, rotation=Cv2Rotation.ROTATE_180
# ),
# "wrist": OpenCVCameraConfig(
# index_or_path="/dev/video2", fps=30, width=480, height=640, rotation=Cv2Rotation.ROTATE_90
# ),
}
...
lerobot/lerobot/common/robots/lekiwi/lekiwi.py
motors={
# # arm
# "arm_shoulder_pan": Motor(1, "sts3215", norm_mode_body),
# "arm_shoulder_lift": Motor(2, "sts3215", norm_mode_body),
# "arm_elbow_flex": Motor(3, "sts3215", norm_mode_body),
# "arm_wrist_flex": Motor(4, "sts3215", norm_mode_body),
# "arm_wrist_roll": Motor(5, "sts3215", norm_mode_body),
# "arm_gripper": Motor(6, "sts3215", MotorNormMode.RANGE_0_100),
# base
"base_left_wheel": Motor(7, "sts3215", MotorNormMode.RANGE_M100_100),
"base_back_wheel": Motor(8, "sts3215", MotorNormMode.RANGE_M100_100),
"base_right_wheel": Motor(9, "sts3215", MotorNormMode.RANGE_M100_100),
},
将“send_action”函数中的机械臂相关代码部分禁用或移除。
lerobot/lerobot/common/robots/lekiwi/lekiwi.py
def send_action(self, action: dict[str, Any]) -> dict[str, Any]:
if not self.is_connected:
raise DeviceNotConnectedError(f"{self} is not connected.")
base_goal_vel = {k: v for k, v in action.items() if k.endswith(".vel")}
base_wheel_goal_vel = self._body_to_wheel_raw(base_goal_vel["x.vel"], base_goal_vel["y.vel"], base_goal_vel["theta.vel"])
# Send goal position to the actuators
self.bus.sync_write("Goal_Velocity", base_wheel_goal_vel)
return {**base_goal_vel}
启动应用程序
运行以下命令以启动机器人:
conda activate lerobot
sudo chmod 666 /dev/ttyACM*
python -m lerobot.common.robots.lekiwi.sound_follow
效果演示
启动程序后,机器人将朝向声音源旋转,持续调整其“头部”方向以对准传入音频的方向。
参考文档
- https://wiki.seeedstudio.com/cn/ReSpeaker_Mic_Array_v2.0/#version
- https://github.com/respeaker/usb_4_mic_array
技术支持与产品讨论
感谢您选择我们的产品!我们致力于为您提供多种支持,以确保您使用我们的产品时获得尽可能顺畅的体验。我们提供多种沟通渠道,以满足不同的偏好和需求。