基于 StackForce 开发平台的双轮足机器人入门教程
本教程只提供组装和调试教程,让开发者以最快速度搭建好完整的轮足机器人,若开发者需要学习轮足机器人相关原理,可以跳转到 b站灯哥开源的教程视频 学习,若需要二次开发可以在其他网站或论坛查找教程。
简介
StackForce双足轮机器人基于StackForce轻量级机器人开发平台开发得到,它的核心硬件驱动由StackForce系列的主控板、电机驱动板和舵机驱动板组成。
机器人程序附带全身运动学模型和状态自适应自稳算法,基于StackForce平台强大的实时运算能力,可以实现多姿态控制,复杂地形自稳定,下楼梯,自稳通过各种复杂坡面地形等。平台支持航模遥控器蓝牙,串口,无线等多种控制方式,用户可以根据需求自行编程调整。该产品配套了完善的安装教程和视频讲解课程,是一款极具性价比的桌面级双足轮机器人。

相关链接
轮足机器人课程代码开源地址:https://gitee.com/StackForce/bipedal_wheeled_robot
StackForce轻量级机器人开发平台文档:http://stackforce.cc/#/
StackForce轻量级机器人开发平台配套机器人项目开源:https://gitee.com/StackForce
主要特点
- 开源且低成本: 遵循开源许可协议;源码和设计文件完全开放,开发者可以自由学习、修改和进行二次开发。
- 高性能电机控制:搭载 FOC(磁场定向控制)技术,支持开环/闭环速度、位置和扭矩控制,实现精确的运动控制。
- 强大的硬件支持:采用 ESP32 主控,提供 I2C、SPI、PWM 等丰富接口,便于灵活扩展功能。
- 丰富的功能能力:支持自平衡、高速运动、姿态稳定以及无线控制,适应多种复杂地形。
- 易于学习与使用:配备完整的示例代码和视频教程,大大降低初学者的学习门槛。
规格
| 类型 | 规格 |
|---|---|
| 主控板 | StackForce 主控板 |
| 电机驱动板 | 5A 双通道无刷电机驱动器 (低功耗) |
| 电机 | 2208 云台无刷电机 |
| 舵机驱动板 | 集成 IMU 的多通道舵机驱动器 |
| 电源 | 12.6V 锂聚合物电池 |
| 编码器 | MT6701 14 位高精度磁编码器 |
| 无线控制 | WiFi 遥控 + PS4 蓝牙无线手柄 |
| 总重量 | 540 克 |
| 尺寸 | 10.5 × 21.0 厘米 (长 × 宽),高度 12.0–21.0 厘米 |
物料清单 (BOM)
| 商品名称 | 数量 | 单位 | 规格 | 型号 |
|---|---|---|---|---|
| 电子配件 | ||||
| StackForce主控板 | 1 | 块 | StackForce | |
| StackForce 5A小功率驱动板 | 1 | 块 | StackForce | |
| StackForce 舵机板 | 1 | 块 | StackForce | |
| 磁编码器 | 2 | 块 | StackForce | MT6701 |
| 电机 | 2 | 个 | 2208 | |
| 舵机 | 4 | 个 | DS041MG | |
| 遥控器 | 1 | 个 | MC6C-MINI | |
| 接收器 | 1 | 个 | MC7RBv2 | |
| 电池 | 1 | 个 | 厚19×宽34×长42 | 12V聚合物电池 |
| 端头 | 2 | 个 | MR30-U型 | |
| 编码器线 | 2 | 组 | SH1.0-5P | |
| 杜邦线 | 1 | 组 | 3P(母对母) | |
| 材料配件 | ||||
| 防松螺母 | 4 | 颗 | M3 | GB889.1-86 |
| 螺母 | 4 | 颗 | M3 | DIN934 |
| 尼龙柱 | 4 | 根 | 5×3.2×9 | ABS |
| 垫片 | 4 | 片 | M3 | 304国标 |
| 磁铁 | 2 | 颗 | 6×2.5 | 径向磁铁 |
| 圆头螺丝 | 24 | 颗 | M2×4 | GB/T845 |
| 圆头螺丝 | 12 | 颗 | M2×10 | GB/T845 |
| 圆头螺丝 | 4 | 颗 | M3×6 | GB/T845 |
| 圆头螺丝 | 4 | 颗 | M3×8 | GB/T845 |
| 圆头螺丝 | 4 | 颗 | M3×16 | GB/T845 |
| 圆头螺丝 | 2 | 颗 | M4×18 | GB/T845 |
| 自攻螺丝 | 16 | 颗 | M2×6 | GB/T845 |
| 平头螺丝 | 46 | 颗 | M2×6 | 304国标 |
| 平头螺丝 | 16 | 颗 | M3×6 | 304国标 |
| 螺柱 | 4 | 颗 | M3×7+4 | 铜国标/GB |
| 轴承 | 4 | 块 | 外27×内20×厚4 | 6704ZZ |
| 轴承 | 6 | 块 | 外18×内12×厚4 | 6701ZZ |
| 结构件 | ||||
| 3D打印件 | 29 | 件 | ||
| 1比10耐磨6030-6085轮胎 | 2 | 个 |
目录
整机款教程
直接按照pdf文档的顺序启动机器人即可遥控。
散件教程1-安装
安装步骤较多,请按照文档教程完成每一步安装,该产品有部分孔洞可以用自攻螺丝,若包装自带的螺丝与教程有出入为正常现象,并不会影响产品组装,开发者用替代螺丝装配即可。
在组装过程中,请注意螺丝的松紧程度,不要太用力拧螺丝,以防滑牙等情况出现。
散件教程2-校准
请先下载校准所需烧录的代码文件
环境配置
第一步:下载 Visual Studio Code
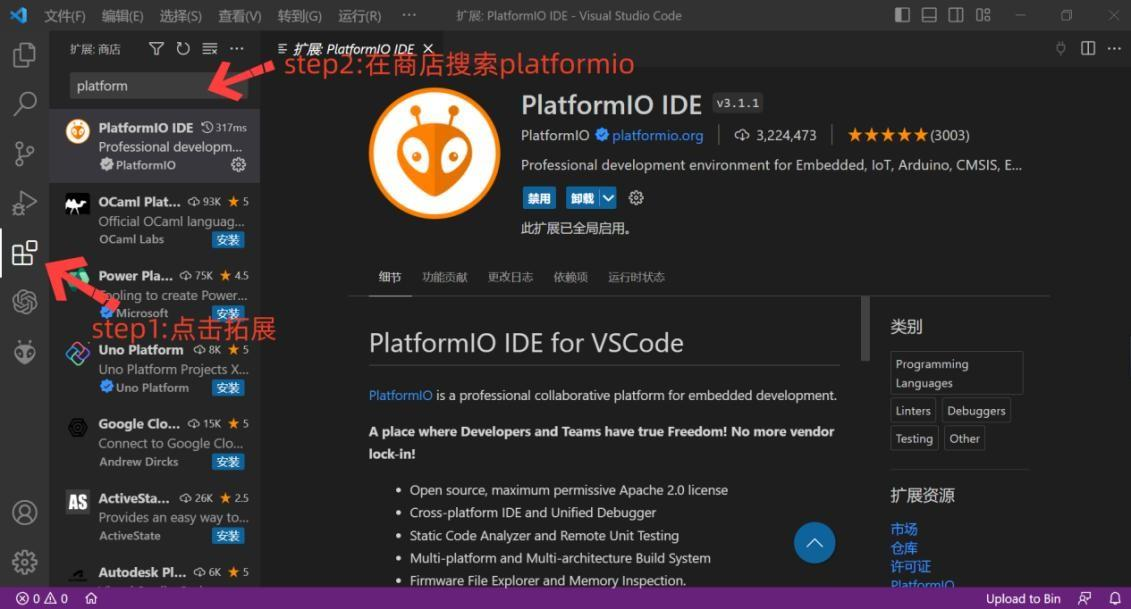
第二步:打开 Visual Studio Code,在其扩展商店中搜索并下载 PlatformIO IDE
点击下载后他会下载其他需要使用的拓展,有时会缺少MinGW,无法新建文件夹,我们需要下载一个MinGW-w64。
第三步:下载 MinGW-w64
轮足工具合集下载链接(内含MinGW-w64)
文件下载后解压,找到轮足工具合集里的mingw64,解压后安装的路径需要全英文,不能有中文,打开解压后的文件→打开 bin 文件→复制 bin 文件的地址(例:D:\ming\mingw64\bin)。
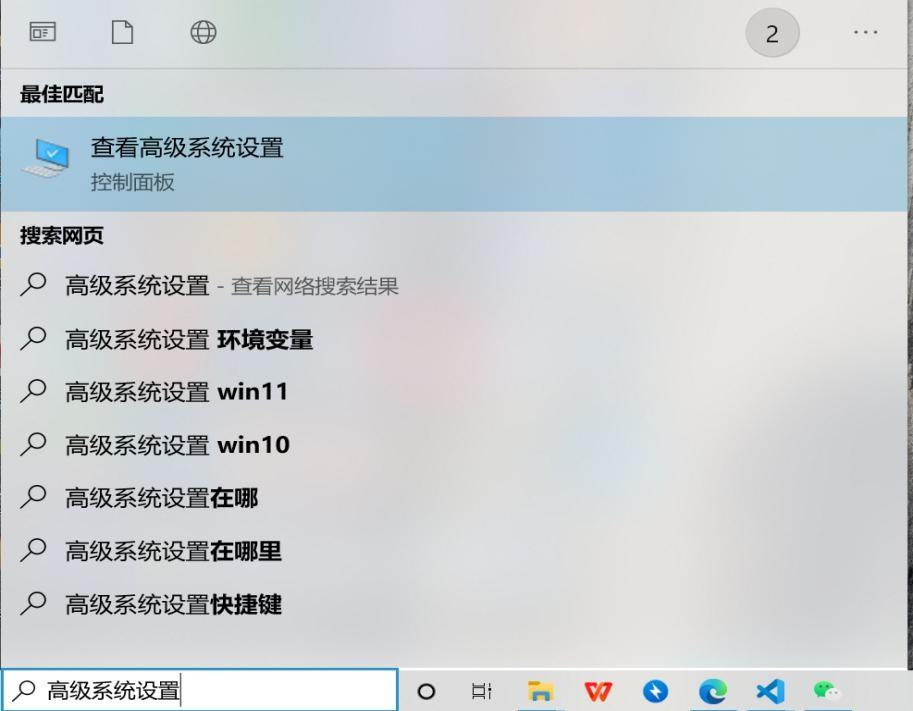
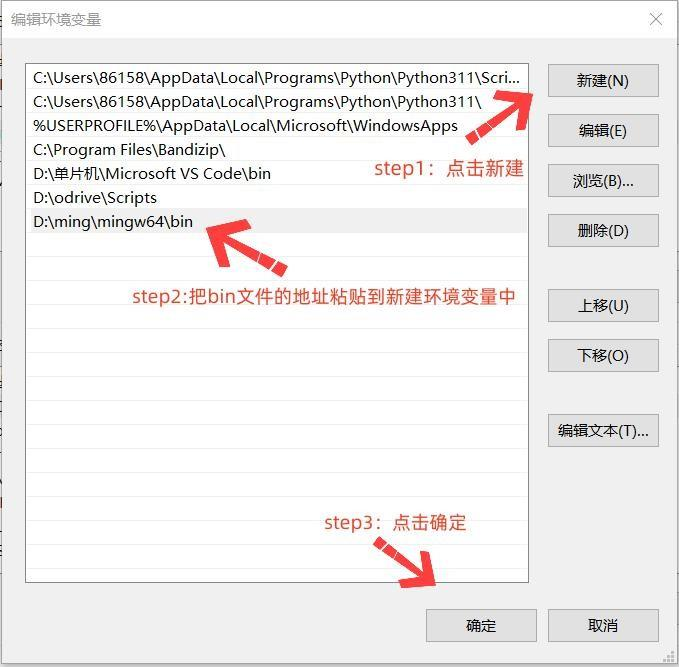
配置环境:电脑搜索打开查看高级系统设置→环境变量→系统变量→Path→新建→粘贴上一步的 bin 文件的地址,点击确定。
- 1:电脑搜索打开
查看高级系统设置。
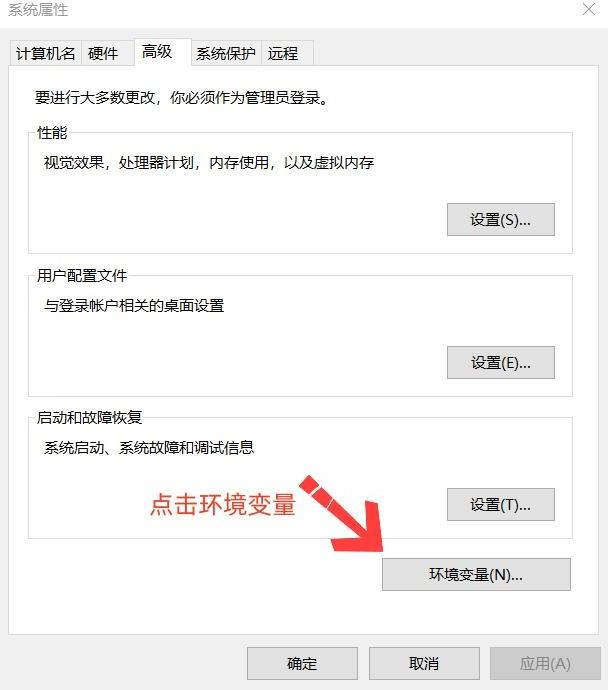
- 2: 点击
环境变量。
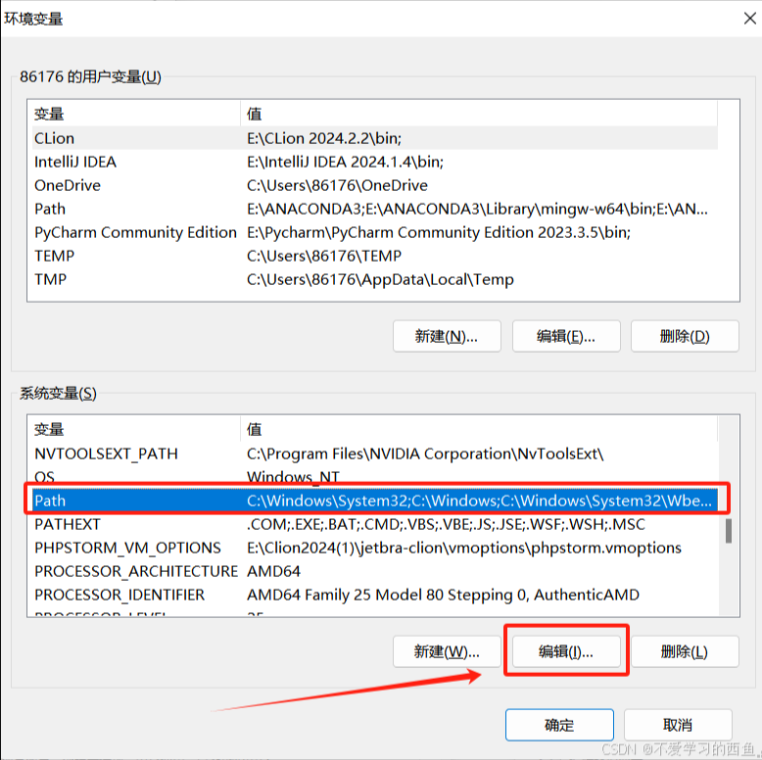
- 3:双击打开
Path,注意是要选择系统变量。
- 4:
新建环境变量。
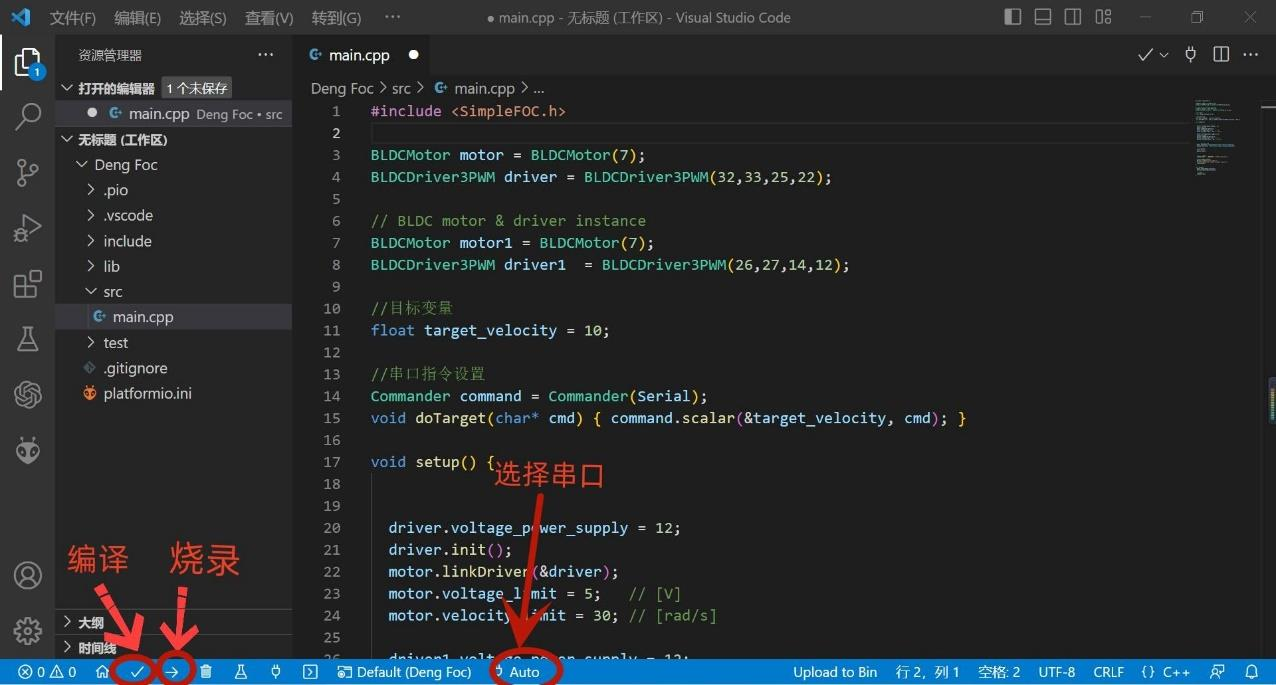
第四步:编译及烧录按键说明
(√:编译程序 →:烧录程序到硬件 Auto:选择串口)
下面是烧录按键说明,先不烧录程序。开发者先在这里了解烧录流程。
电脑与硬件连接、点击 Auto(可忽略),会自动检测并推荐串口。选择串口后点击编译(可忽略)、烧录,即可将程序烧录至硬件。
S1烧录和调试
连接S1芯片
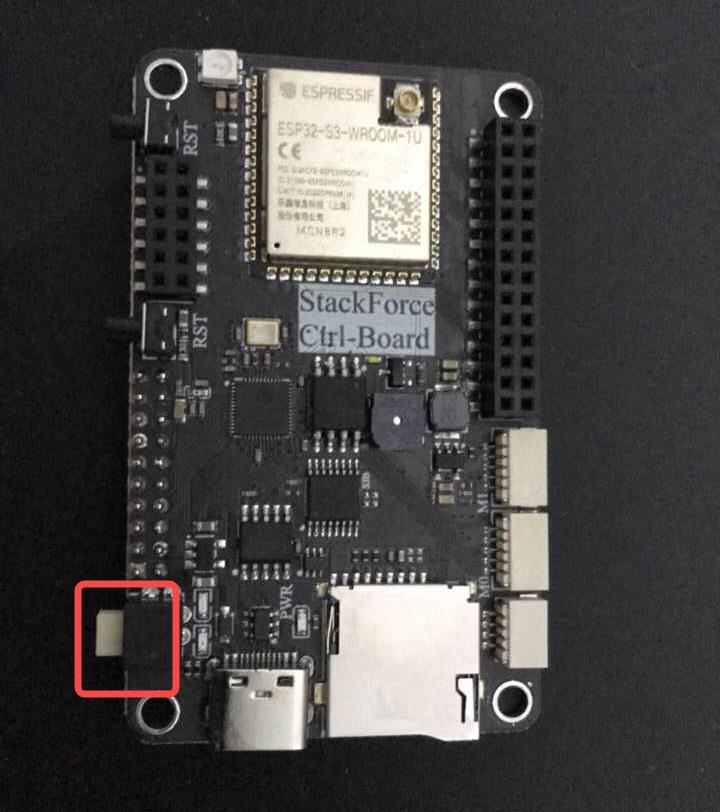
连接USB,USB有缝隙一边朝上,无缝一边朝下,松开白色按键,切换至S1芯片(黄灯亮)。
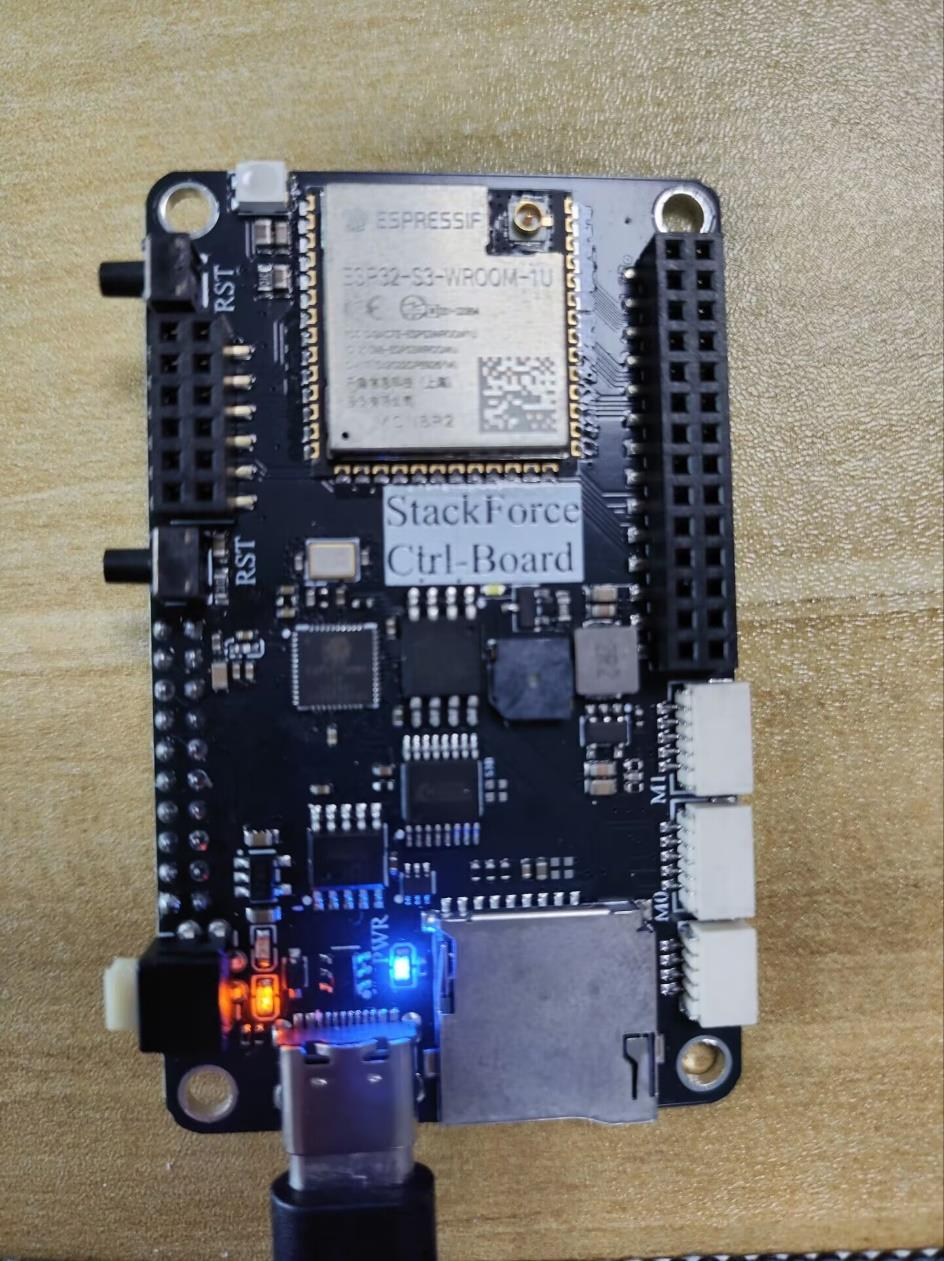
备注:为什么要分上下
因为板子有两个芯片,S1芯片负责电机程序的运行,S3负责舵机控制程序的运行,typec线有上下个两排排针分别通信,主控板设计两个芯片分别占用typec的一排用来烧录程序,通过白色按键来在硬件上控制电脑要把程序烧录到哪个芯片。
烧录S1程序
方法一:根据提前烧录好的S1电机控制程序,直接跳到下方“Vofa串口助手下载与使用教程”。
方法二:按照下方操作,重新烧录一遍S1电机控制程序(不推荐)
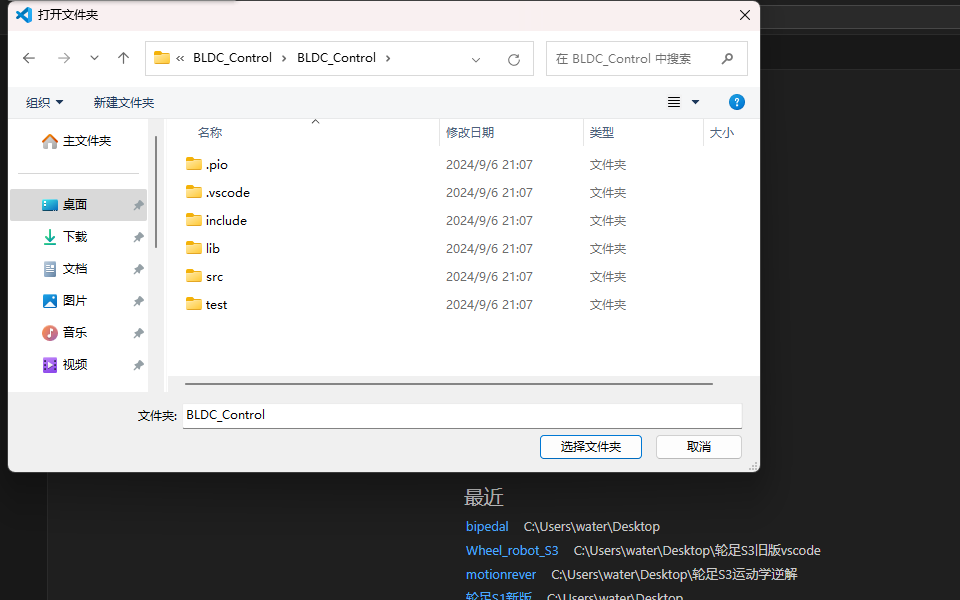
在vscode打开工程BLDC_Control
这样操作可以让platformio自动安装库,所以不能直接将项目文件拖进vscode 打开新的vscode软件,打开文件夹(或者是在文件打开文件夹)。
找到S1程序保存的位置,点击选择文件夹(不能有中文路径,且一定要打开到当前位置)。
烧录前需要修改注册码与芯片的通讯方式:
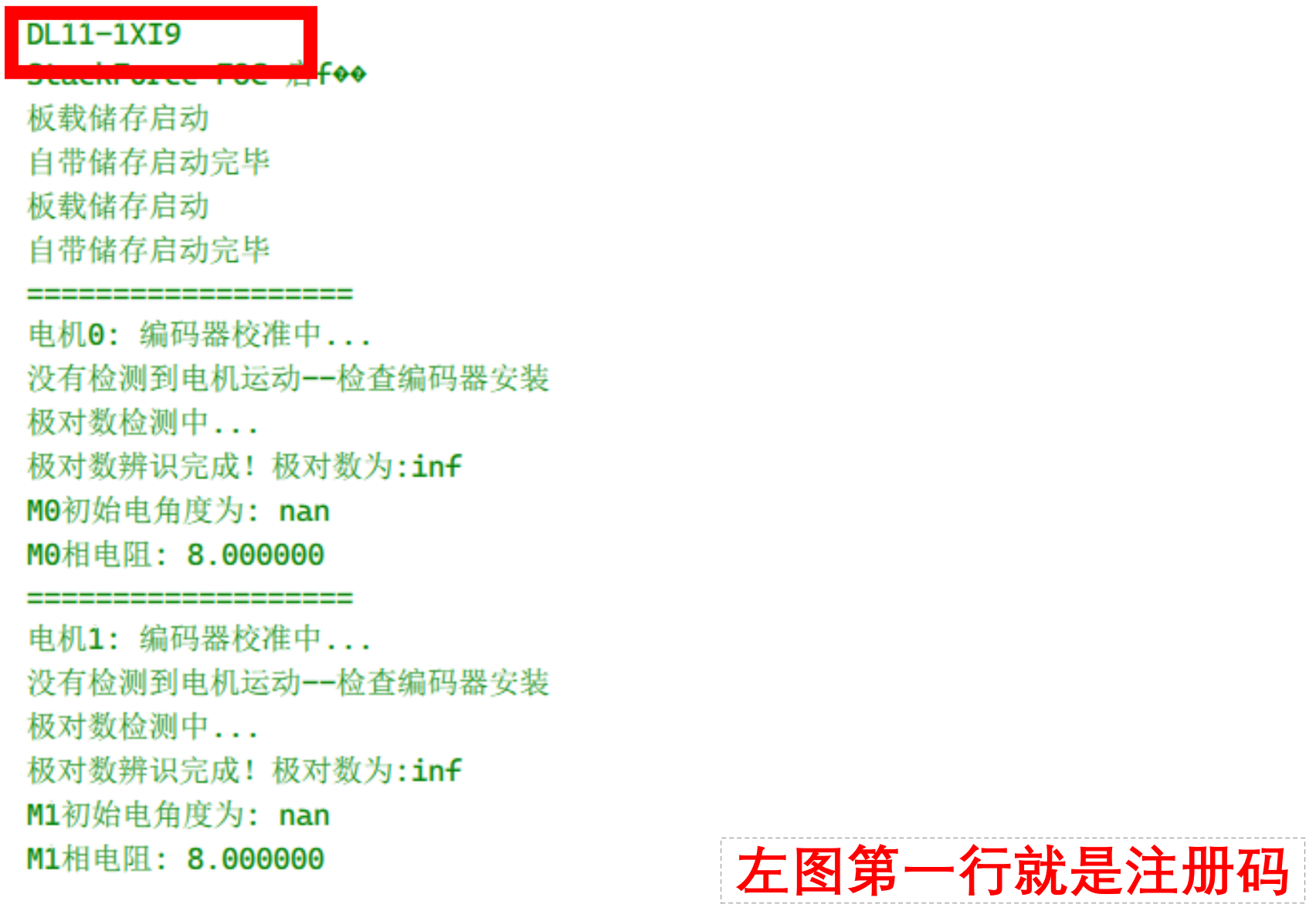
修改注册码:
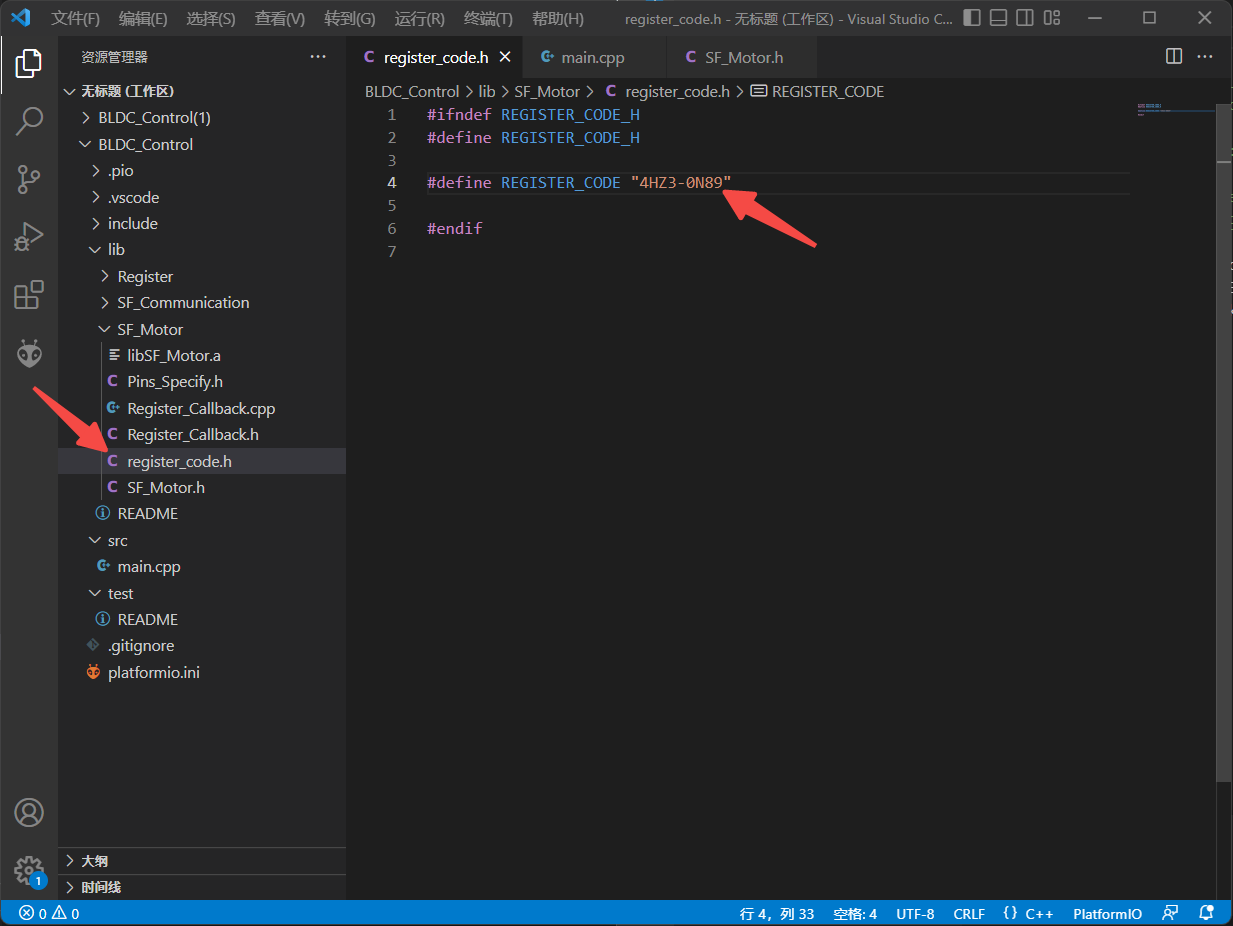
每个板子的注册码都是不一样的,您的注册码我们将他贴在了主控包上的标签纸,将其输入到这个位置。 也可以查看S1的串口信息获取注册码,前面安装文档有说明。
修改通信方式,在图中位置修改为ONBOARD(USB为主控板的S1芯片与电脑之间进行串口通信,ONBOARD为S1芯片与S3芯片之间通信)。
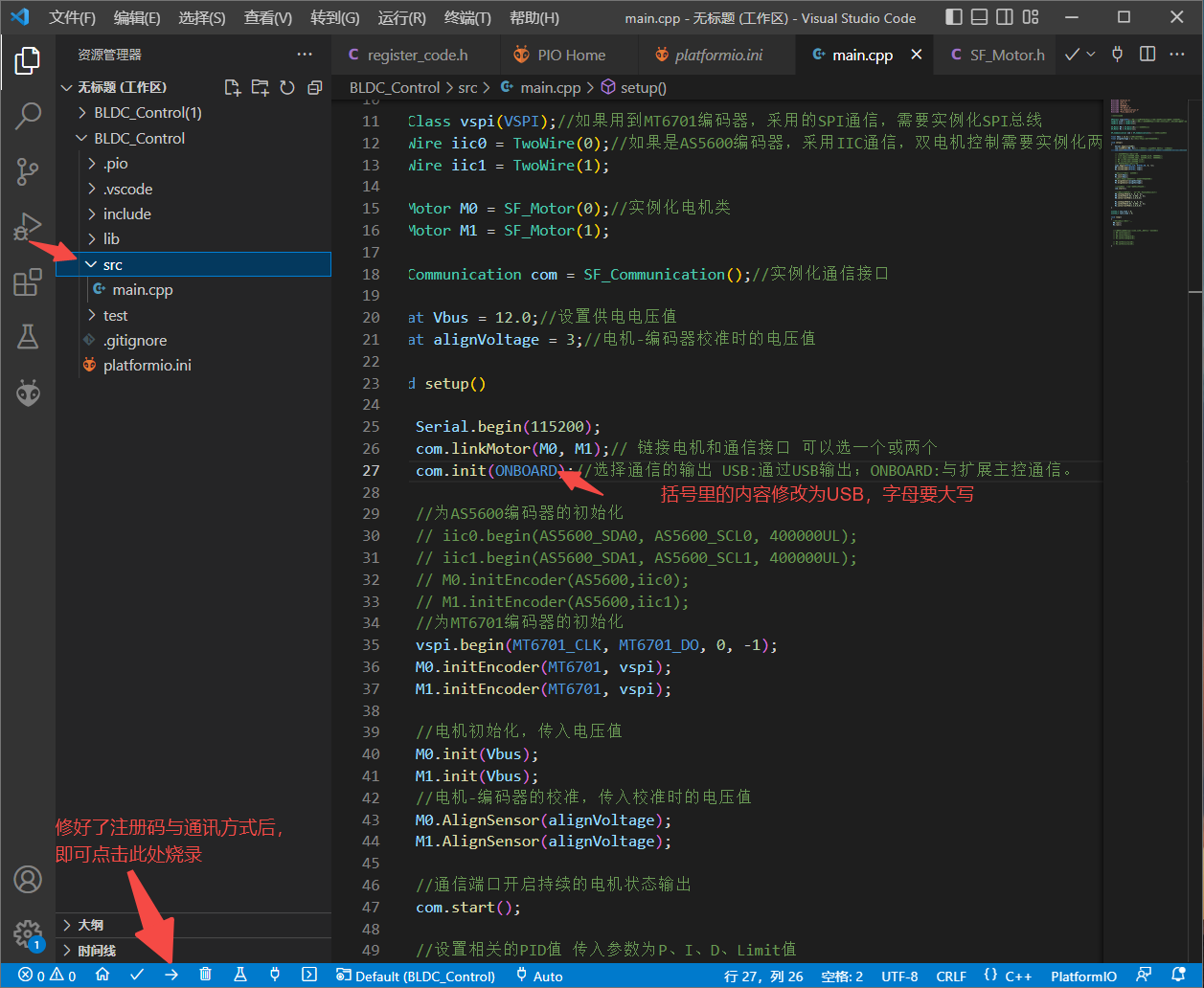
修改完成后点击左下角向右的箭头即可烧录程序。
烧录过程可能会遇到的问题及解决办法
1、成功烧录效果
2、这个主控芯片是S3,与S1程序不匹配
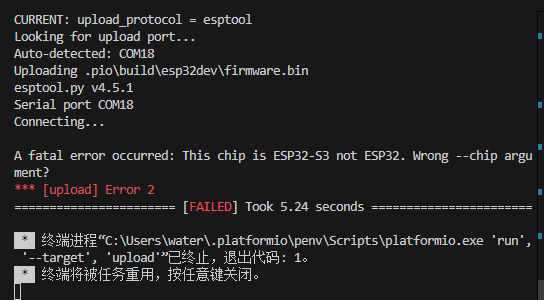
解决方法:检查USB是否插反,要求无缝朝上;检查主控白色按键是否有松开,松开时按键旁边亮黄灯,主控处于S1芯片烧录状态。
3、串口被占用了
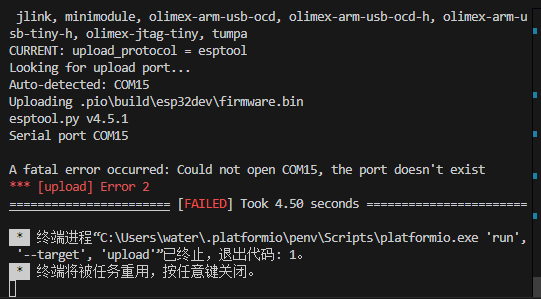
解决方法:检查有没有其他软件占用了串口,检查vofa的串口监视器是否关闭,检查其他串口助手是否关闭串口。
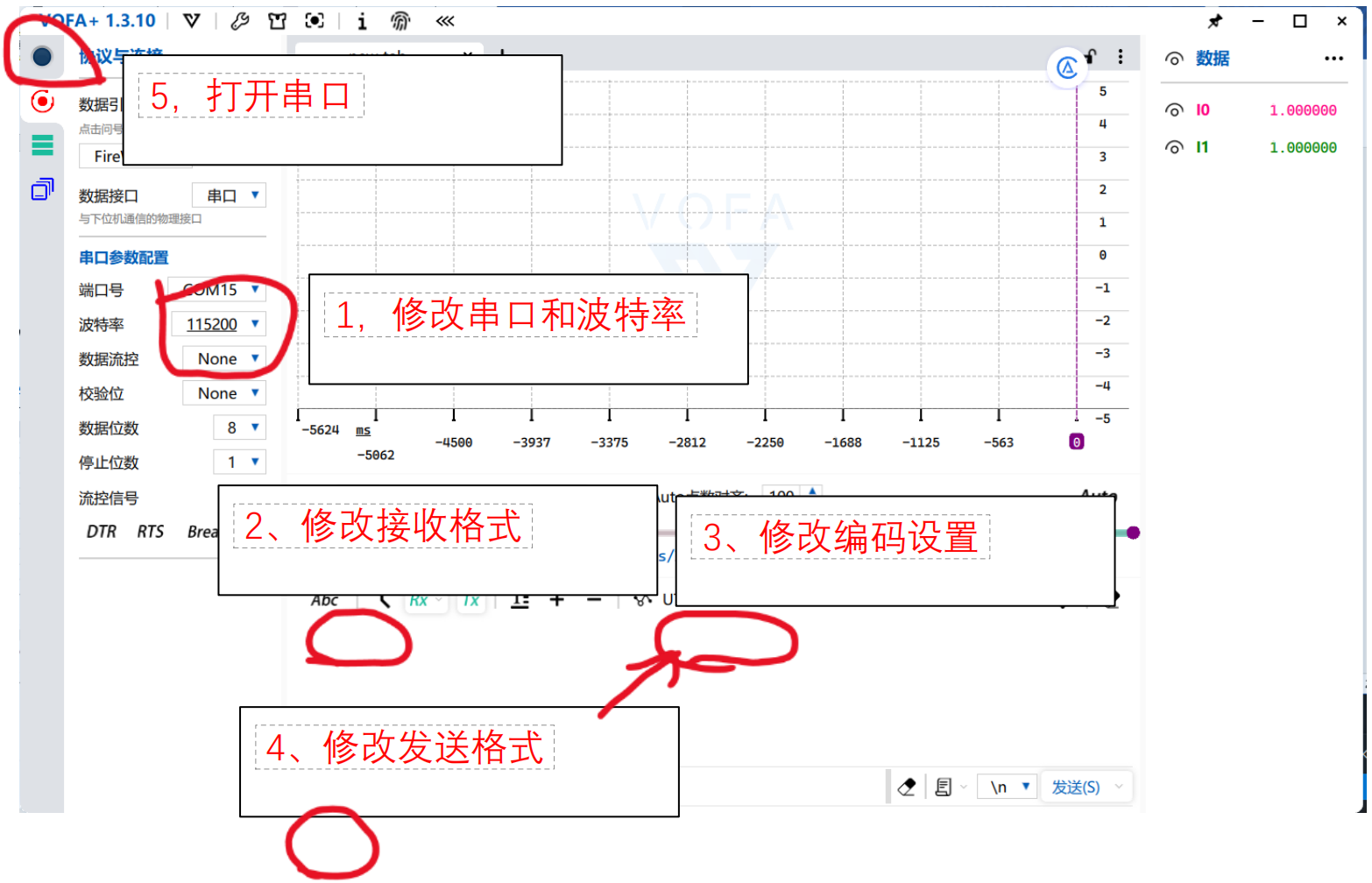
Vofa串口助手下载与使用教程
接着,打开串口助手,波特率为115200,查看串口信息。Vofa串口助手下载网址:下载中心| VOFA-Plus上位机
S1电机控制程序调试,极对数校准
用手扶着机器人,轮子离开地面,按一下S1复位键,此时vofa上显示有极对数信息,等待轮子自检转动完成,如极对数被辨别后是7,则表示校准成功,则如下图所示。
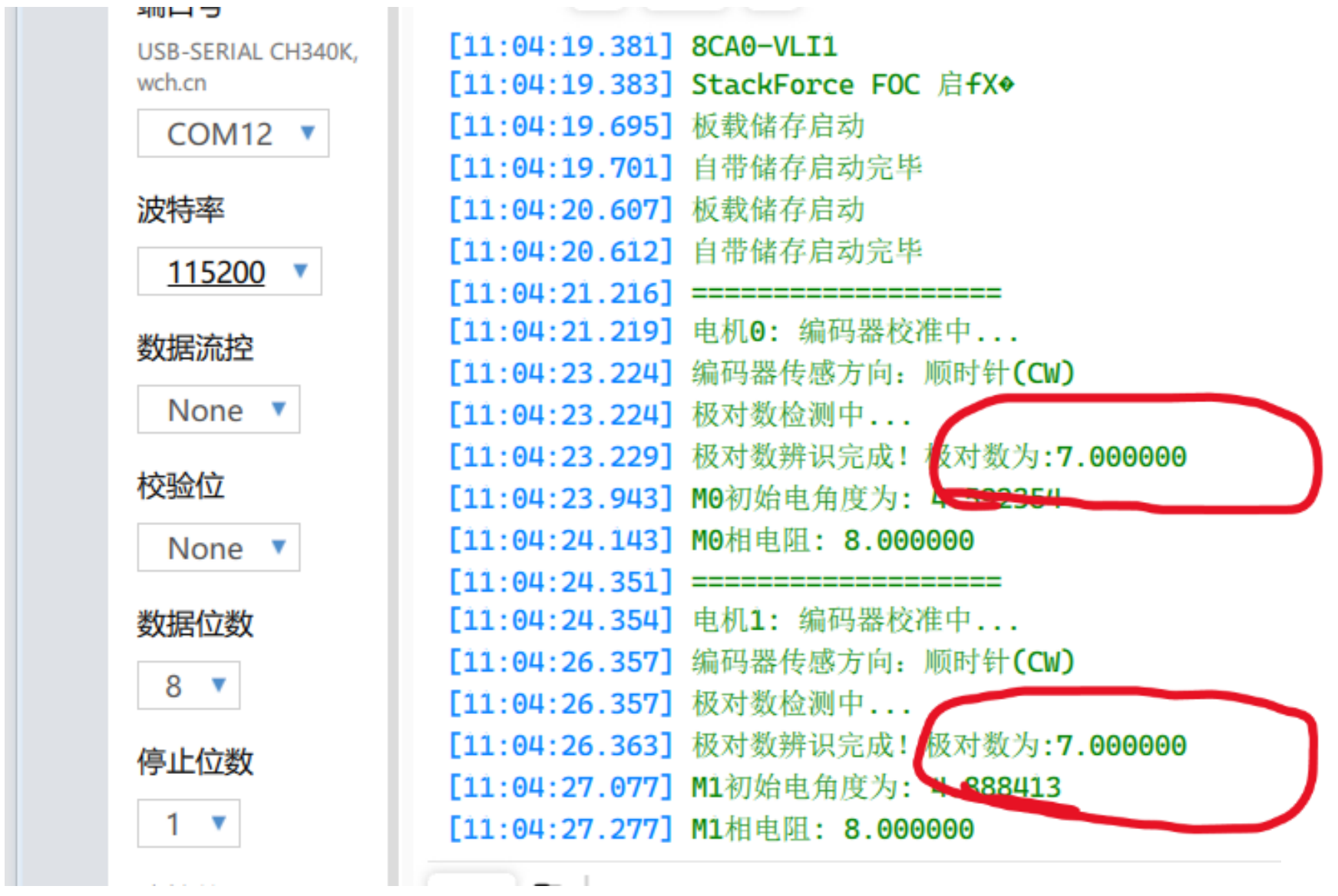
若极对数为inf或其它英文字符串,则请检查是否打开了电源,检查线路是否接错,检查磁铁是否安装。如果极对数为6或者8或者是非7数值,可能是车轮安装过紧,(可查看轮足安装文档搜索“电机轴承安装”,重新安装这个位置),或者是轮子与地面有摩擦(每次上电或S1复位都要让机器人离地或者轮子不要碰到其他地方,自检才能正常运行)可重新调试再S1复位直到极对数显示为7为止。
S3偏置值获取
烧录完S1后,切换至S3芯片,并烧录S3程序(USB无缝隙朝下,按下图所示按钮,灯为绿色则切换至S3)
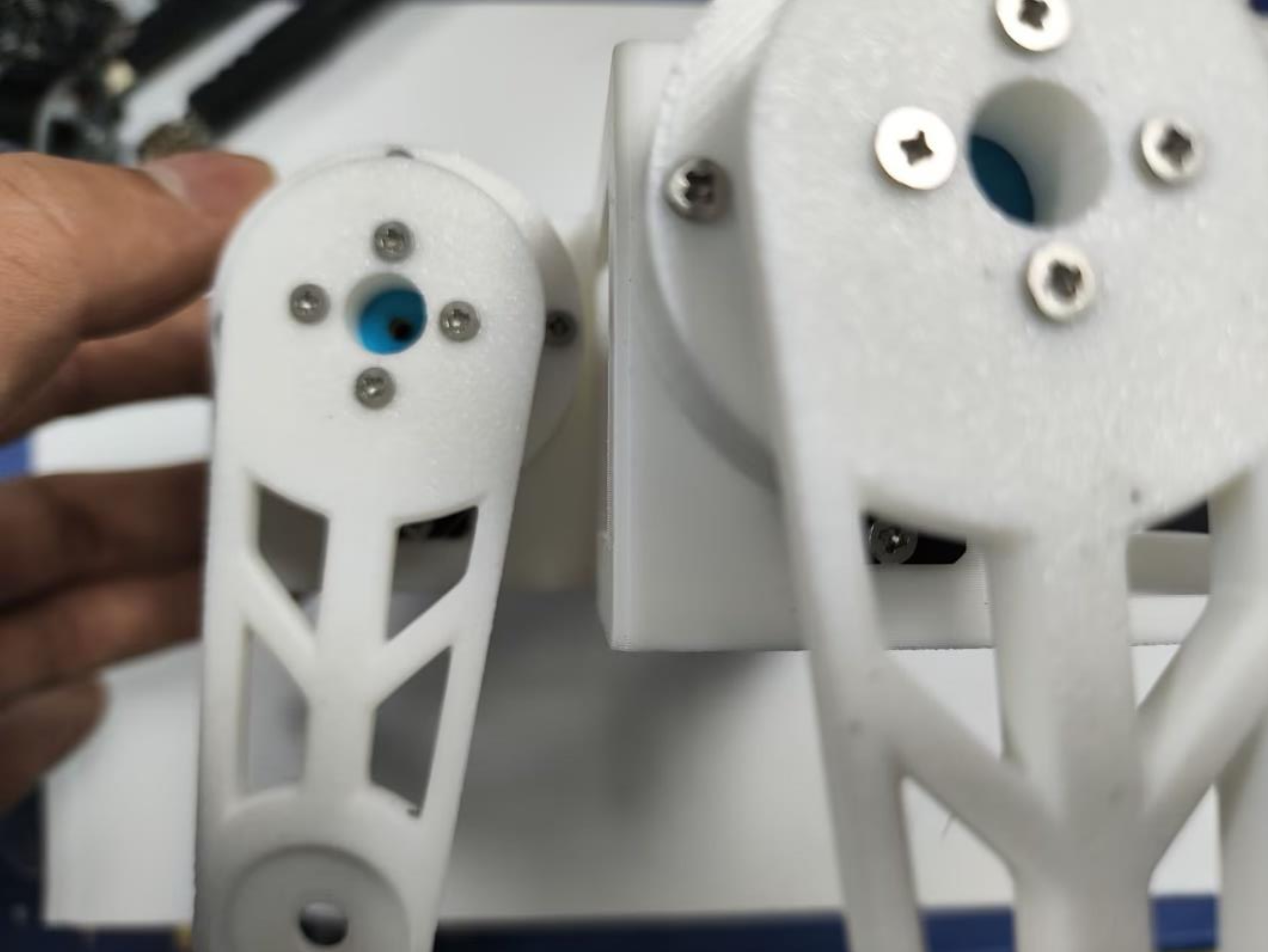
在烧录程序前一定要将大腿拆下,参考下图。
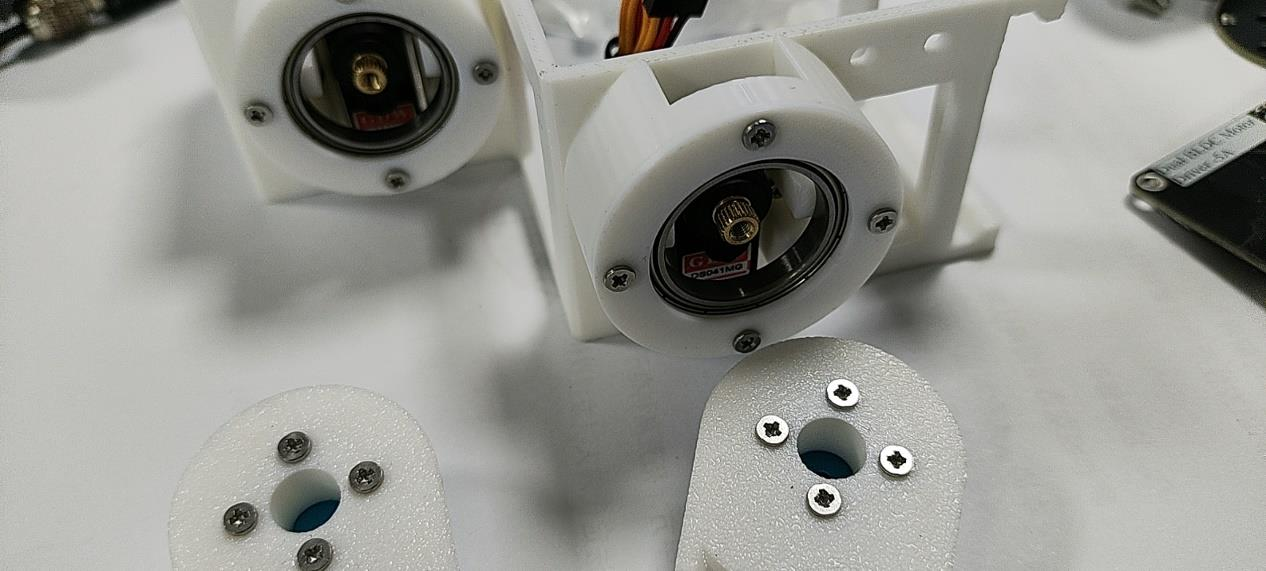
- 1.在vsoce打开bipedal_calibrate文件夹(偏置值获取程序),直接烧录程序,打开vofa,波特率设置115200,可以看到串口信息为0,0,0,0;分别代表1,2,3,4号舵机的偏置值
- 2.电池上电,等待舵机完成转动后安装腿部尽量垂直于水平面。
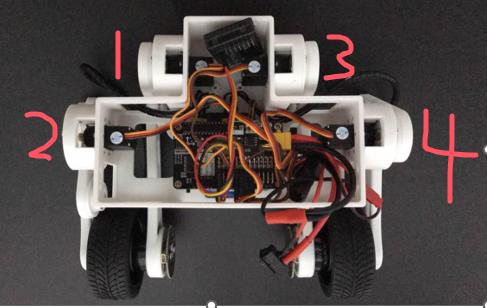
- 3.在串口输入
1,2,3,4等指令控制舵机转动直到腿部完全垂直水平面。方向解释:腿部面向自己,顺时针为负,逆时针为正。
比如:看上图1号舵机左偏了一点,2号舵机右偏移了一点,输入 5,-6,0,0 控制1,2号舵机完全垂直与机身(5表示让1号舵机逆时针转5个单位角度,-6表示让2号舵机顺时针转6个单位角度)。
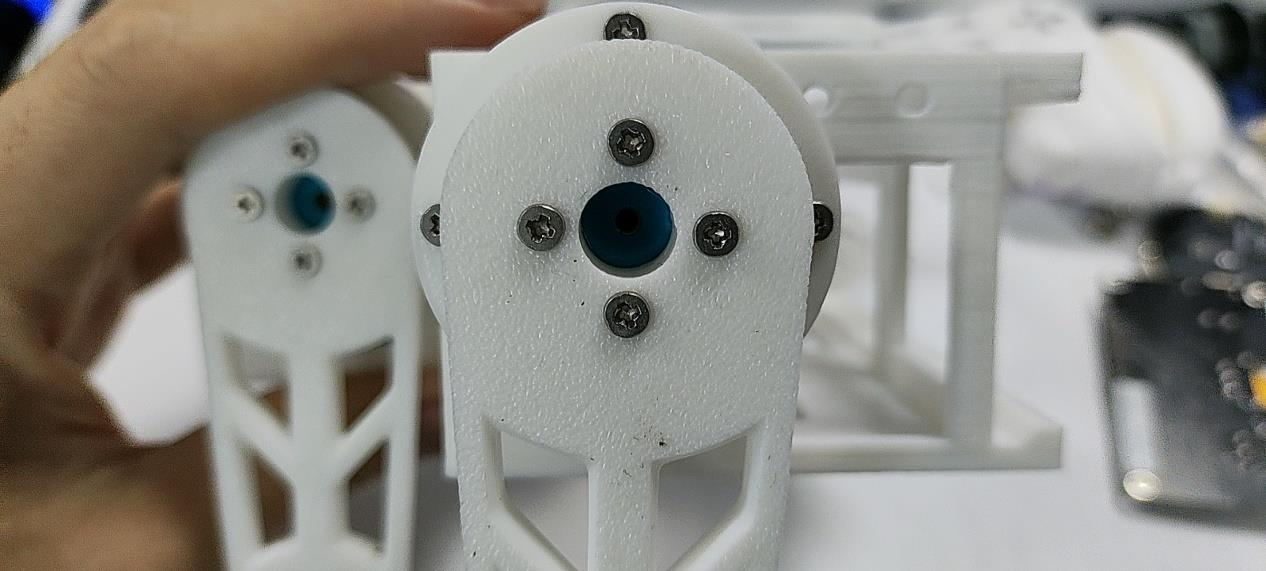
其他两个舵机也是和上方一样的方法调节,0,0,x,0 控制3号舵机;0,0,0,x 控制4号舵机。调节完偏置值后将舵机盒子里的黑色螺丝拧紧大腿。
记录下当前的偏置值,要写到下面的S3芯片的舵机控制程序。
S3校准和调试
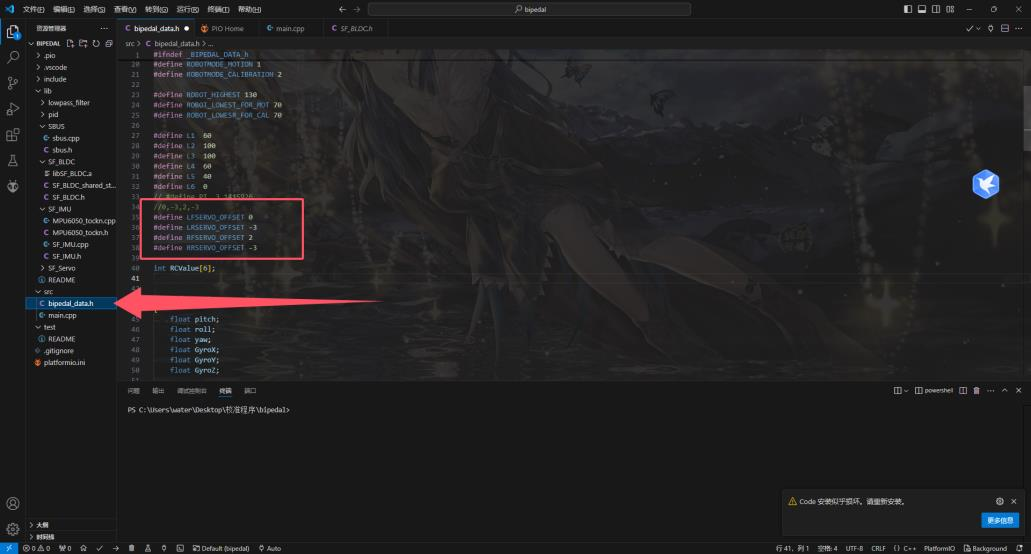
1. 修改偏置值
在vscode打开bipedal文件夹(舵机控制程序),在bipedal_data.h文件下修改偏置值OFFSET,具体看如下,将上面程序获取到的偏置值输入到下面对应位置。
2. 舵机调试
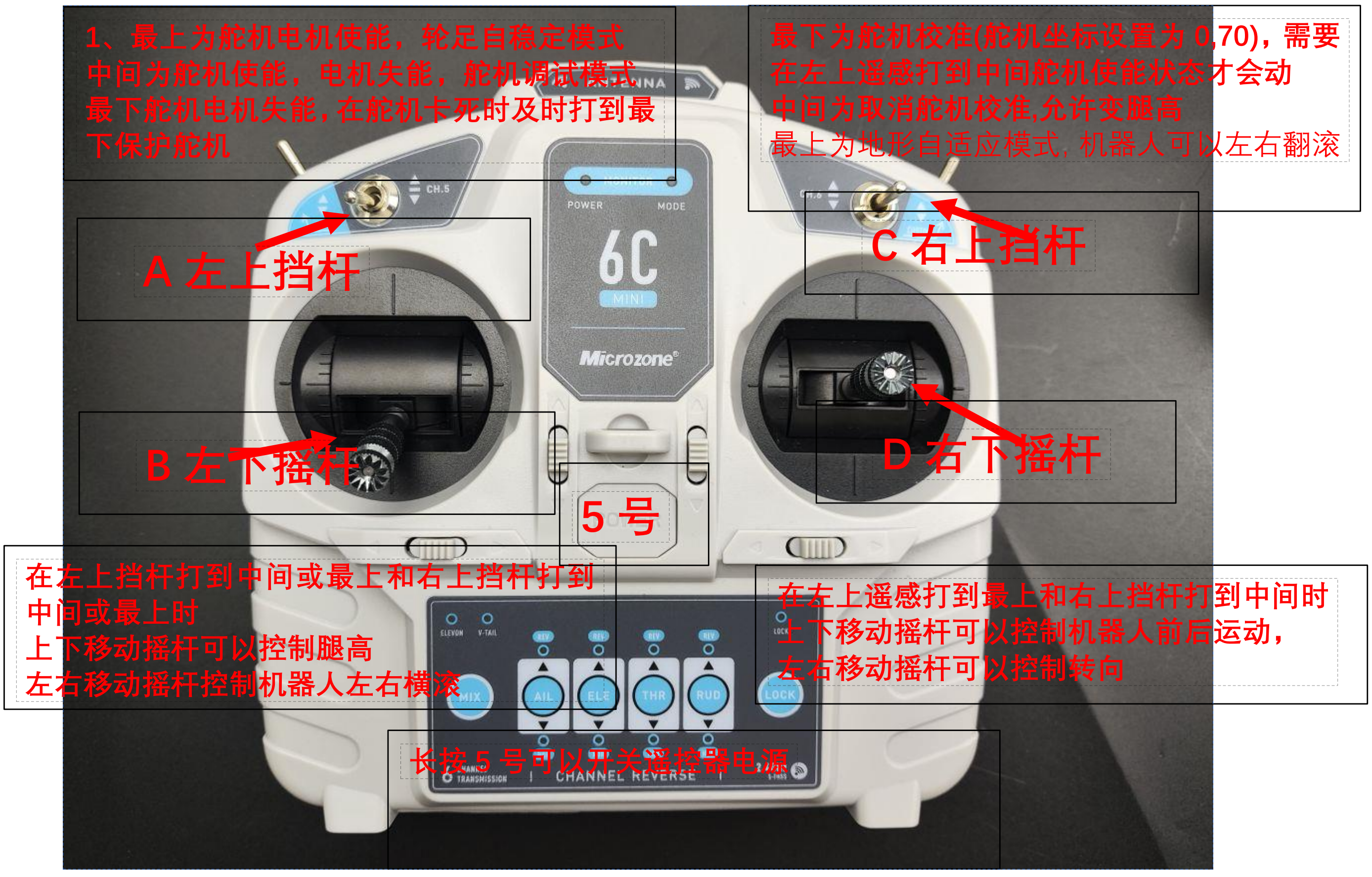
- 烧录完程序后拔开usb,然后长按5打开遥控器遥控器A左上打中,B左下打下,C右上打下。
- 用手扶着机器人,并且让机器人保持水平陀螺仪校准和电机校准,按下按钮机器人上电。
- 等待10秒左右自检完成后A打中舵机使能,等待舵机转回初始位置,C打中取消舵机校准,滑动B控制腿高移动轮子y坐标,滑动D控制轮子前后移动轮子x坐标。
- 轮足移动说明,遥控器D向前拨动,舵机转动使轮子x坐标后移动,轮足前倾并向前移动。
3. 设置SpdDir
设置电机固定转动方向,在main文件下搜索motors.setTargets,设置电机0和电机1的力矩固定为2。
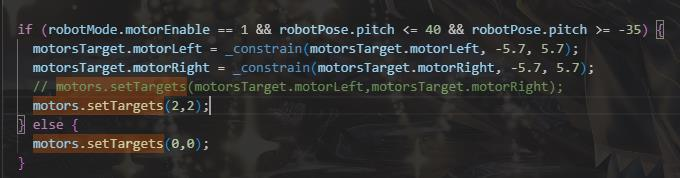
看下图使用vofa打印出电机速度,vofa波特率921600,连接S3

烧录程序到S3,然后打开vofa设置波特率为921600,遥控器A打上电机使能,上电并用手扶着让电机自检完成(可以先用vofa与S1通信看看是否自检通过)。
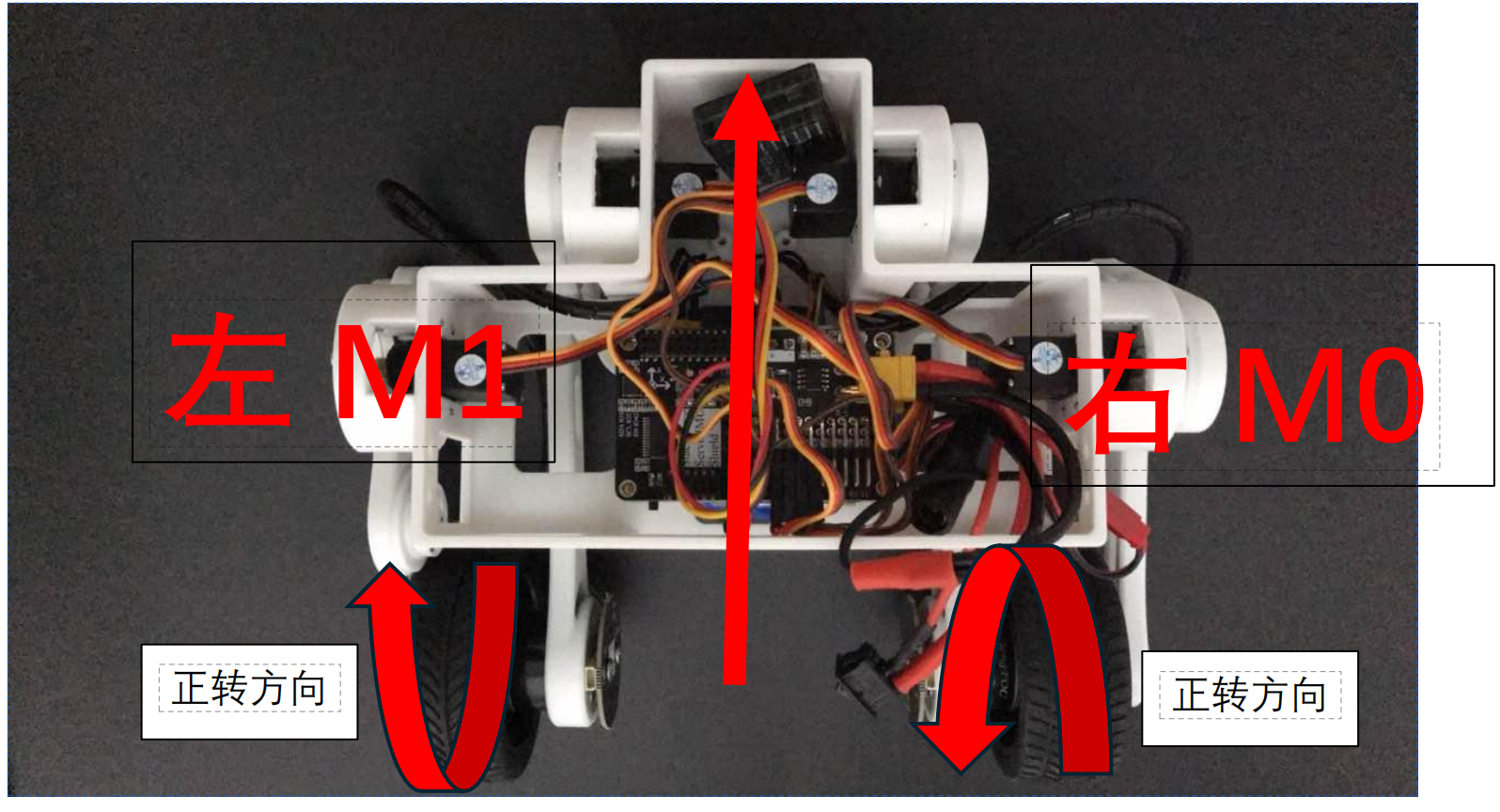
观察电机转动方向,左电机向前转则速度为正,如果vofa上打印的第三个数据M1速度为负,则需要将motorStatus.M1SpdDir取反,打印为正则不需要修改。
右电机向后转则速度为负,如果vofa上打印的第二个数据M0速度为负,则不需要修改motorStatus.M0SpdDir,打印为正则需要取反。
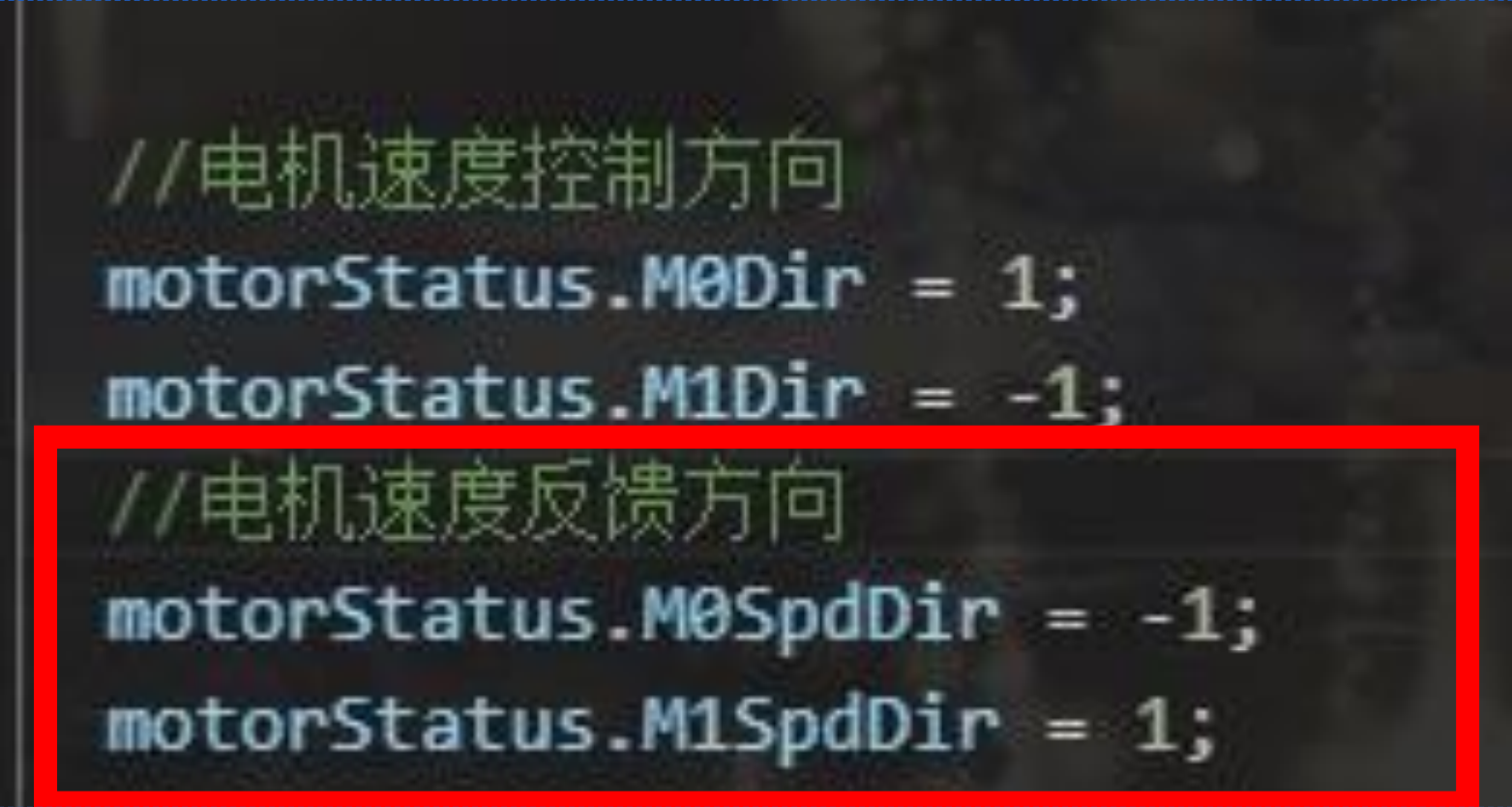
如果上面还是不理解,可以看一下下面这里
假如轮子向前转,vofa打印为负数,那么反馈dir要取反
假如轮子向前转,vofa打印为正数,那么反馈dir不用改
假如轮子向后转,vofa打印正数,,那么反馈dir要取反
假如轮子向后转,vofa打印时负数,那么反馈dir不用取反
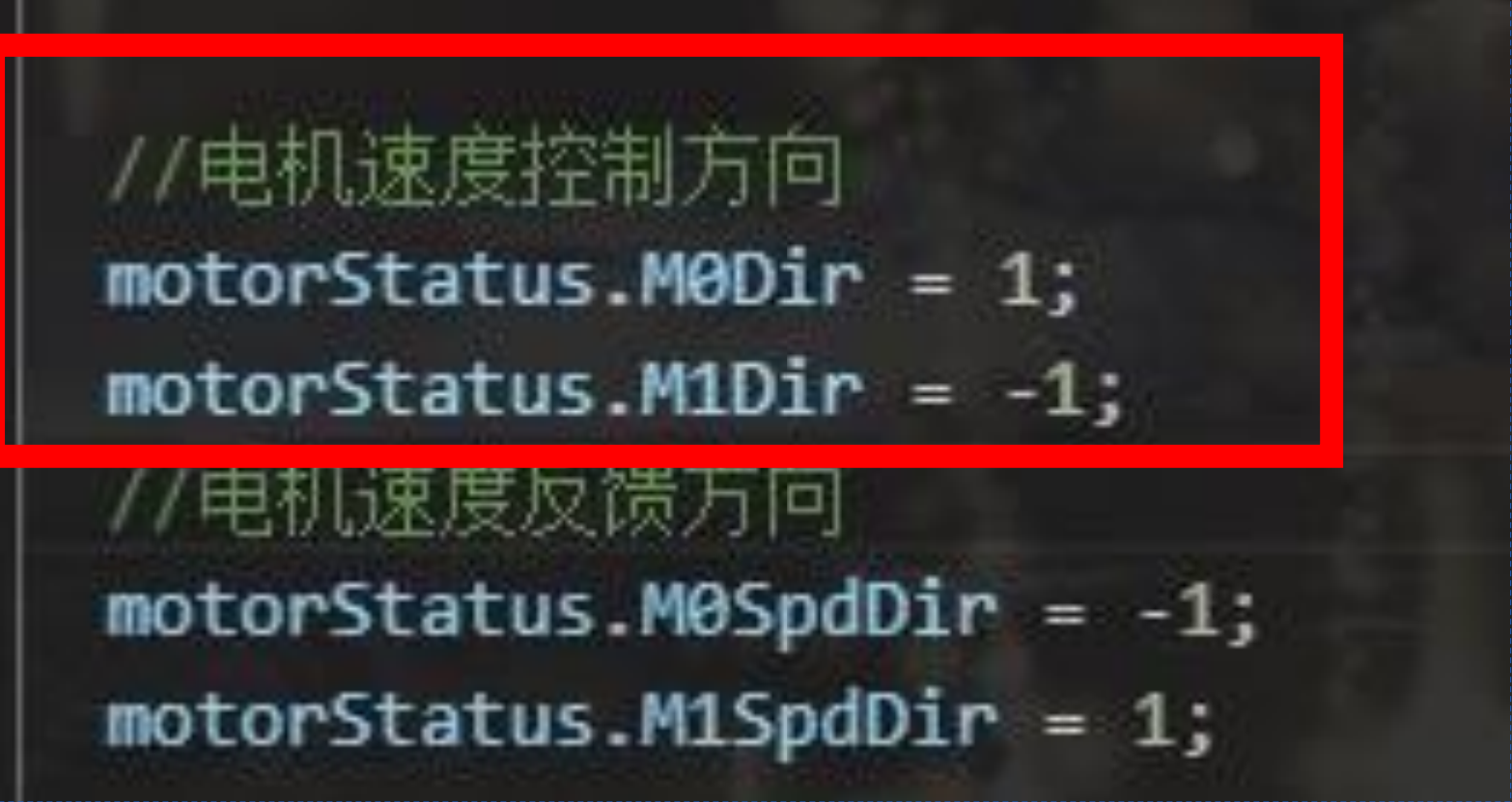
4. 设置电机控制dir,搜索motors.setTargets
按照下图取消电机控制的注释,注释下一行,烧录程序。
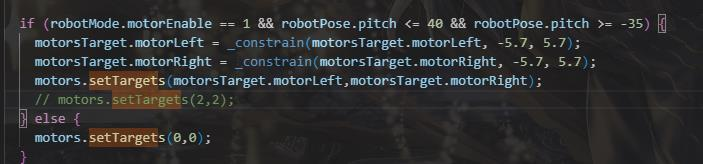
给轮足上电,复位完后手持轮足机器人向前倾斜,观察轮子转动方向如果全部向前转动则可以平衡,如果左边向后则需要将M1Dir取反,右轮同理。
完成上述部分后就可以对机器人控制了,按照下述部分是是实现控制,可以查看StackForce轮足机器人基本操作说明.pdf。
遥控器正面四个遥杆:
-
第一步,遥控器左上打到中档,右上打到下档,左下打到最下,机器人用手扶着,让腿部自然下垂,轮子离开不与其他接触,并且保持机器人与地面平行。
开机,保持上述大约10秒后,机器人放到宽广地上,手扶着保持机器人直立。
-
第二步,遥控器右上打到中档,左下稍微上滑,左上打到上档,机器人就开始自平衡运动。
遥控器右下遥感缓慢前后滑动,控制机器人前后运动,左右滑动控制左右转。
遥控器左下摇杆上下变腿高。
遥控器右上打到最上后,左下摇杆左右滑动控制机器人横滚运动,通过断电取消横滚。
实际演示
(待添加实际演示视频)
参考文档
技术支持与产品讨论
感谢您选择我们的产品!我们在此为您提供多种支持,以确保您的产品体验尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。