Stackforce系列电机入门指南
本文将介绍如何开始使用 Stackforce系列电机,以及如何在 reComputer Mini Jetson Orin 上使用 Python 和 C++ 控制它们。

规格参数
以下是所有电机型号的完整参数表:
| 参数 | 6010 | 8108 |
|---|---|---|
| 额定电压 | 24V | 24V |
| 额定电流 | 10.5A | 7.5A |
| 额定功率 | 240W | 180W |
| 额定扭矩 | 5 Nm | 7.5 Nm |
| 峰值扭矩 | 11 Nm | 22 Nm |
| 额定转速 | 120 RPM | 110 RPM |
| 最大转速 | 270 RPM | 320 RPM |
| 减速比 | 8:1 | 8:1 |
| 通信协议 | MIT协议 | MIT协议 |
| 控制模式 | 位置,速度,力矩控制 | 位置,速度,力矩控制 |
| 外径 | 80 mm | 97 mm |
| 厚度 | 47 mm | 46 mm |
| 重量 | 392 g ±10% | 395 g ±5% |
| 相电阻 | 0.48 Ω ±10% | 0.439 Ω ±10% |
| 相电感 | 368 μH ±10% | 403 μH ±10% |
主要特点
- 高扭矩输出
- MIT模式控制模式
- 磁性编码器反馈
- 轻巧和小巧设计
- 支持高速CAN总线通信
- 多样化应用
入门指南
使用前的环境准备
PC上的Windows系统
电机的 CANID 与 CANMode 都是通过串口进行修改,电机出厂默认 CANID 为 0x01,CANMode 为 CAN2.0 1Mbps。
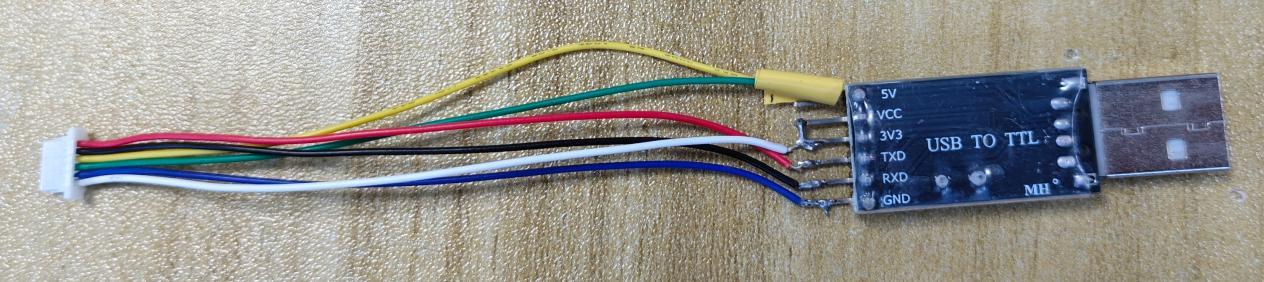
串口接线
依次将 V,G,T,R 连接到串口通信模块的 VCC(3.3V),GND,RX,TX(RX 与 TX 要交差连接)。如下图所示:
修改CANID
设置串口波特率为1Mbps。
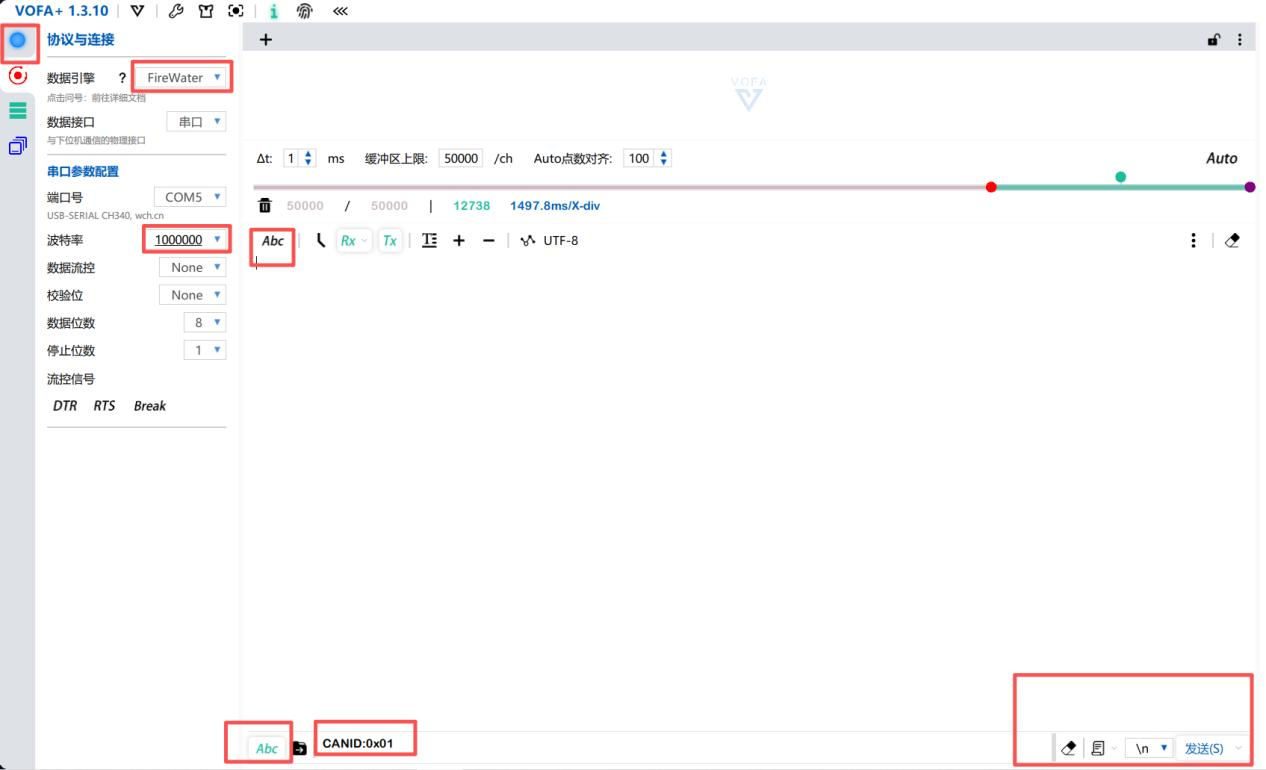
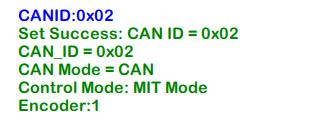
发送的CANID是0x**,设置的ID就是0x**,最大不能超过0x7F。设置CANID成功后会打印如下日志:
现在设置CANID:0x01,方便后续代码测试。
修改CAN模式
串口发送CANMODE:0或CANMODE:1
CANMODE:0为CAN2.0模式(1Mbps),CANMODE:1为CANFD模式(5Mbps)。
修改CAM模式成功如下图所示:
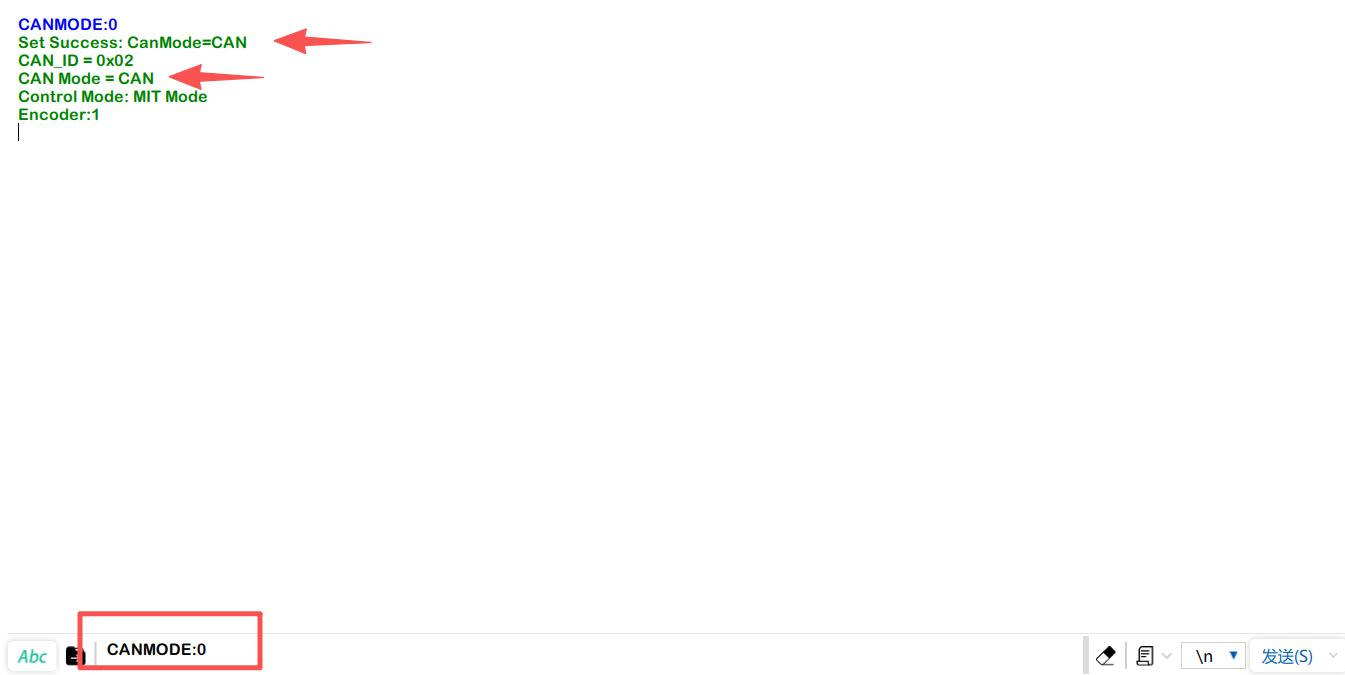
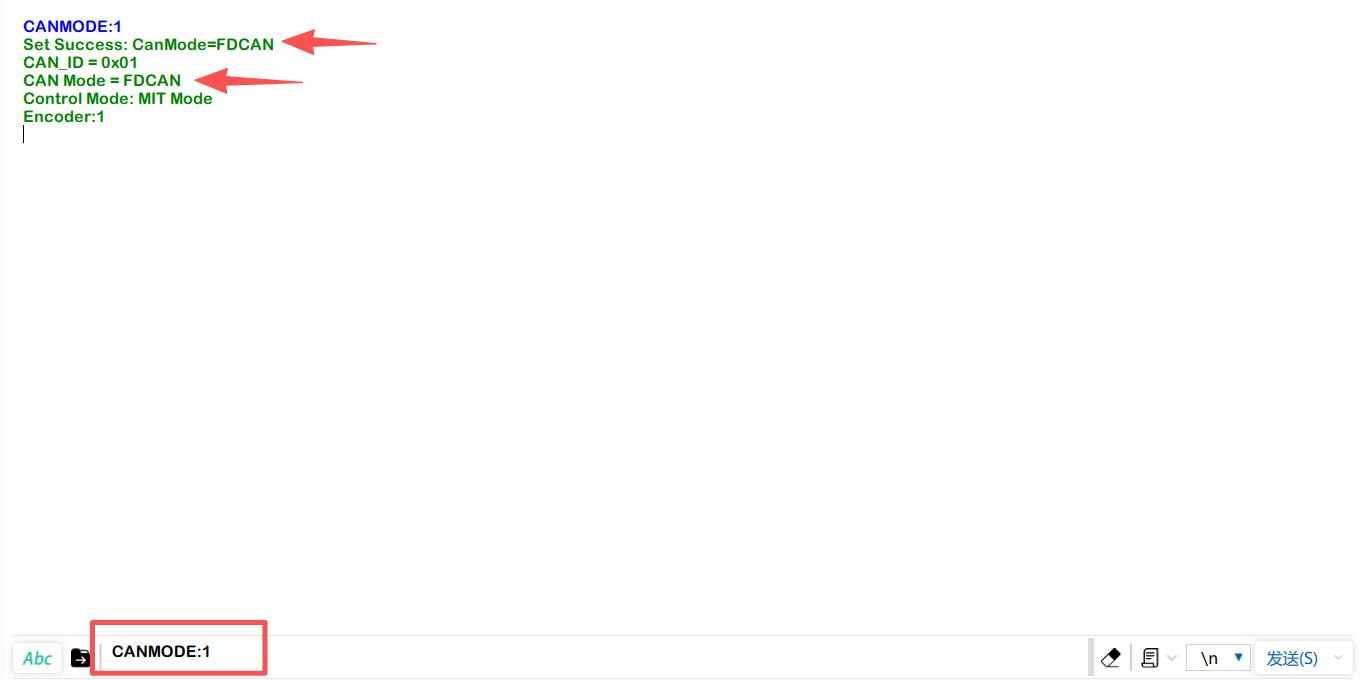
现在设置CANMODE:0,方便后续代码测试。
使用 reComputer Mini Jetson Orin 控制电机
目前市场上电机最常见的 CAN 通信接口使用 XT30 (2+2) 和 JST 接头。我们的 reComputer Mini Jetson Orin 和reComputer Robotics设备配备了 双 XT30 (2+2) 接口 和 基于 JST 的 CAN 接口,提供无缝兼容性。
reComputer Mini:

reComputer Robotics

有关 CAN 使用的更多详细信息,请参考此 wiki。
启用 CAN 接口
步骤1: 在使用 CAN0 和 CAN1 之前,请移除底部盖板并将两个 120Ω 终端电阻设置为 ON 位置。

将电机上集成的120Ω的CAN通信终端电阻的波动开关关闭。
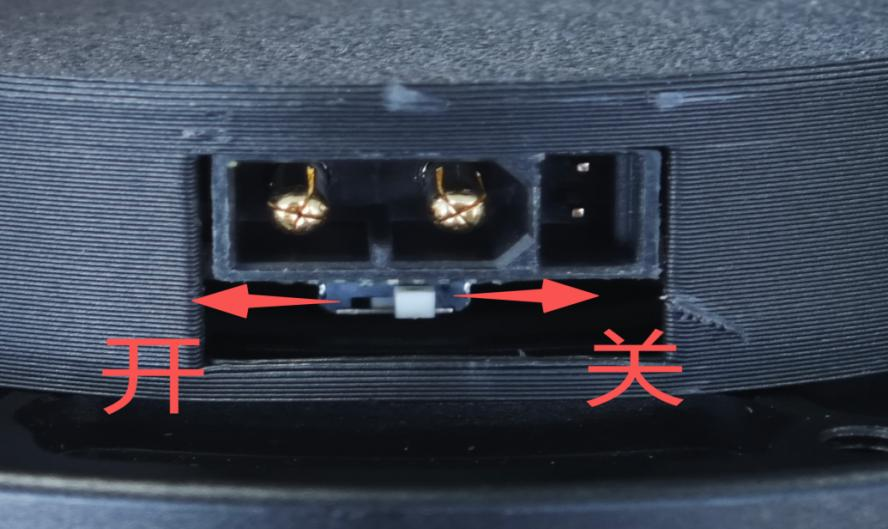
如果recomputer Mini没有设置120Ω 终端电阻为 ON,可以选择将电机的CAN通信终端电阻的波动开关打开。
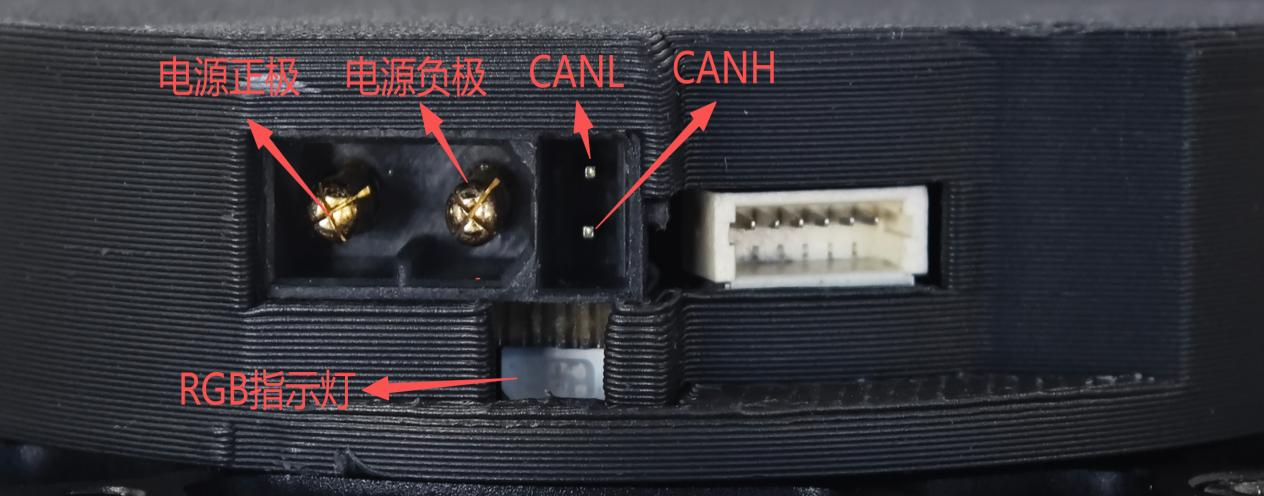
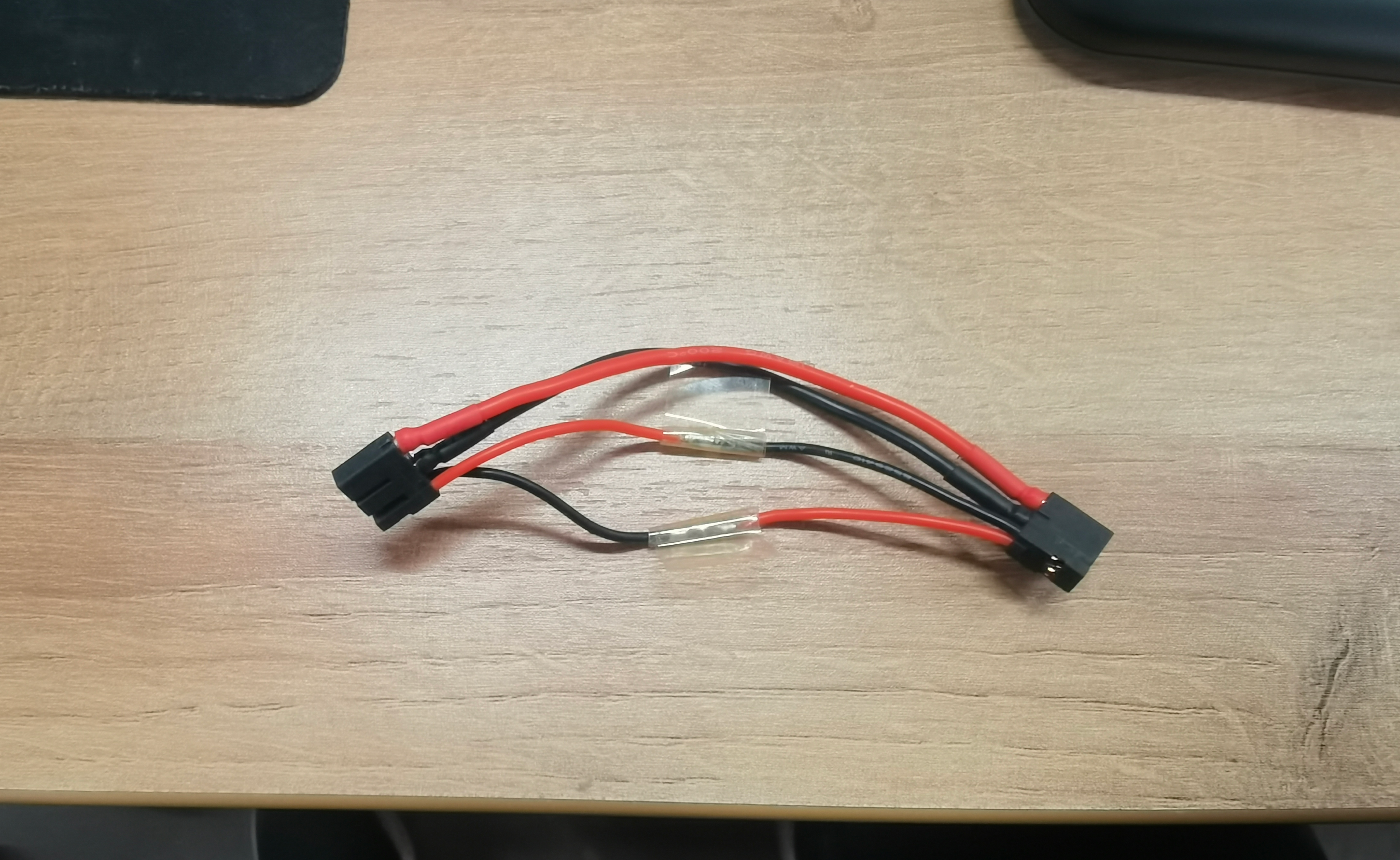
步骤2: 通过 XT30 (2+2) 接口将电机直接连接到 reComputer Mini 的 CAN0。


因为reComputer Mini的can接口设计与电机的can接口相反,所以需要手动焊接,反接数据线。

考虑到电机所需要的大电压和大电流,推荐购买24v 300w的电源适配器来给reComputer Mini供电,以便驱动单个电机,如果要接入更多电机,可以根据需要购买更大功率的电源适配器。

此电源仅用于单电机学习和测试。对于多个电机,请设计单独的电源板,并将 Jetson 的电源与电机电源隔离,以避免高电流直接通过 Jetson。
启用 Jetson CAN 通信
打开终端并输入以下命令,将 GPIO 引脚拉高以激活 CAN0:
gpioset --mode=wait 0 43=0
如果使用 JST 接口的 CAN1,请将引脚 106 拉高。
gpioset --mode=wait 0 106=0
保持此终端打开,启动一个新终端并配置 CAN0。
sudo modprobe mttcan
sudo ip link set can0 type can bitrate 1000000
sudo ip link set can0 up
构建 Python 和 C++ 环境
步骤1: 克隆 SDK。
git clone https://github.com/Seeed-Projects/Stackforce-Motor-SDK.git
步骤2: 此驱动 SDK 需要安装以下依赖项。对于 Debian Linux,可以通过以下命令安装:
sudo apt-get install -y build-essential cmake
sudo apt install linux-modules-extra-5.15.0-1025-nvidia-tegra # 对于 Jetson Jetpack 6.0
如果需要使用 Python 绑定,还需额外安装 Python 3、pip 和 pybind11:
sudo apt-get install -y python3 python3-pip python3-pybind11 python3-setuptools
安装依赖项后,需按照以下步骤将驱动 SDK 安装为 C++ 库或 Python 包。两者都将使用 CMake 编译 C++ 代码。
电机控制和数据反馈
C++
main.cpp
#include <chrono>
#include <cstdint>
#include <cmath>
#include <cstdio>
#include <thread>
#include "CAN_comm.h"
#include "config.h"
MIT devicesState[4];
uint32_t sendNum; // 用于测试发送速度
uint32_t recNum;
MIT MITCtrlParam;
uint16_t sendCounter = 0;
bool motorEnable = true;
int receivedNumber = 0;
uint64_t prev_ts = 0;
float t = 0.0f;
float targetJointAngle = 0.0f; // 目标关节角度(可在运行时通过输入修改)
namespace {
uint64_t micros_steady(){
using namespace std::chrono;
// 获取基于 steady_clock 的当前时间(微秒)
return duration_cast<microseconds>(steady_clock::now().time_since_epoch()).count();
}
}
void setup() {
std::printf("SF Motor Control (Jetson) start\n");
CANInit();
enable(0x01); // 使能 ID 为 0x01 的电机 ← 修改 ID 可控制不同电机
prev_ts = micros_steady();
t = 0.0f;
}
uint16_t printCount = 0;
uint16_t recCount = 0;
void loop() {
recCANMessage(); // 接收 CAN 总线上的电机反馈信息
// 检查是否有新的关节角度输入
// (每 1000 次循环检查一次,避免频繁的阻塞式输入调用)
static uint16_t inputCheckCount = 0;
if(++inputCheckCount >= 1000){
inputCheckCount = 0;
float newAngle;
if(std::scanf("%f", &newAngle) == 1){
targetJointAngle = newAngle;
std::printf("目标关节角度已更新: %.3f rad\n", newAngle);
}
}
static int IDswitch = 0x01; // ← 修改 ID 可控制不同电机
uint64_t current_ts = micros_steady();
/*
* 功能:
* 根据时间差更新控制参数,并发送 MIT 控制指令
*
* 参数:
* - current_ts : 当前时间戳
* - prev_ts : 上一次时间戳
* - t : 用于正弦/余弦计算的时间变量
* - MITCtrlParam:
* 控制参数结构体,包括:
* 位置、速度、位置增益 Kp、速度增益 Kd、力矩
* - IDswitch : 电机 ID 选择器
*
* 返回:
* 无
*/
if(current_ts - prev_ts >= 1000){ // 1 ms 控制周期
// 更新时间变量(增加 1 ms)
t += 0.001;
// 设置控制参数:
// 目标位置、目标速度、位置增益、速度增益、力矩
MITCtrlParam.pos = targetJointAngle;
MITCtrlParam.vel = 0;
MITCtrlParam.kp = 0.5;
MITCtrlParam.kd = 0.3;
MITCtrlParam.tor = 0;
// 更新时间戳
prev_ts = current_ts;
// IDswitch++;
// 如果 IDswitch 超过 0x04,则重置为 0x01
// if(IDswitch > 0x04){
// IDswitch = 0x01;
// }
sendMITCommand(IDswitch, MITCtrlParam); // 发送 MIT 控制指令
printCount++;
if(printCount >= 100){
printCount = 0;
// 仅在 IDswitch 为 0x01 时打印
// 打印指令位置/速度 以及 电机实际位置/速度
if(IDswitch == 0x01){
std::printf(
"[CMD] pos: %6.3f rad vel: %6.3f rad/s | "
"[FB] pos: %6.3f rad vel: %6.3f rad/s\n",
MITCtrlParam.pos,
MITCtrlParam.vel,
devicesState[IDswitch - 1].pos,
devicesState[IDswitch - 1].vel
);
}
}
}
// 延时 1 ms,降低 CPU 占用
std::this_thread::sleep_for(std::chrono::milliseconds(1));
}
int main(){
setup();
while(true){
loop();
}
disable(0x01); // 关闭 ID 为 0x01 的电机
return 0;
}
cd build
cmake ..
make
编译后的可执行文件将位于 build/sfmotor_control。运行程序:
./sfmotor_control
程序默认会控制 ID 为 0x01 的电机,在运行过程中可以通过键盘输入目标角度值,单位rad。同时接收电机角度,角速度的反馈数据。
Python
main.py
import sys
import time
import select
# 导入核心控制模块(假设 sf_can_controller.py 与本文件位于同一目录)
from sf_can_controller import MotorController
# --- 核心配置 ---
IFACE = "can0"
MOTOR_ID = 1 # ← 修改 ID 可控制不同电机
UPDATE_RATE_HZ = 100.0
PRINT_EVERY = 2
INITIAL_TARGET_DEG = 0.0
# --- 主控制循环 ---
def run_simple_test() -> None:
"""运行一个简化的位置控制循环"""
# 1. 初始化
update_period = 1.0 / UPDATE_RATE_HZ
target_rad = INITIAL_TARGET_DEG
KP, KD = 0.5, 0.3 # 默认 MIT 控制参数
controller = MotorController(interface=IFACE, motor_id=MOTOR_ID)
print(f"--- SF 电机测试开始 ---")
print(f"接口: {IFACE}, ID: {MOTOR_ID}, 频率: {UPDATE_RATE_HZ} Hz")
# 2. 使能电机
controller.enable()
last_send_time = time.perf_counter()
print_counter = 0
inputCheckCount = 0
# 3. 主循环
while True:
controller.poll_rx() # 轮询接收 CAN 反馈数据
current_state = controller.get_motor_state() # 获取当前电机状态
now = time.perf_counter()
# --- 周期性检查用户输入(每 500 次循环一次) ---
inputCheckCount += 1
if inputCheckCount >= 500:
inputCheckCount = 0
# 阻塞式等待用户输入(会暂停控制循环)
# 注意:如果输入不是数字,将抛出 ValueError 异常
line = input("请输入目标关节角度: ").strip()
if line:
angle_deg = float(line)
target_rad = angle_deg
print(f"目标关节角度已更新: {angle_deg:.3f} deg")
# 按固定周期发送 MIT 控制指令
if now - last_send_time >= update_period:
last_send_time = now
# 发送目标位置控制指令
controller.send_mit_command(
pos=target_rad,
vel=0.0,
kp=KP,
kd=KD,
tor=0.0
)
# 打印电机状态
print_counter += 1
if print_counter >= PRINT_EVERY:
print_counter = 0
print(
f"Cmd={target_rad:.2f} | "
f"Pos={current_state.pos:.2f} (Vel={current_state.vel:.2f})"
)
# 睡眠 1 ms,降低 CPU 占用
time.sleep(0.001)
if __name__ == "__main__":
# 运行测试程序
run_simple_test()
Python 脚本位于 script/ 目录中,可以直接运行无需编译。
python main.py
程序默认会控制 ID 为 0x01 的电机,在运行过程中可以通过键盘输入目标角度值,单位rad。同时接收电机角度,角速度的反馈数据。
资源文件
技术支持与产品讨论
感谢您选择我们的产品!我们致力于为您提供多种支持,以确保您使用我们的产品时体验顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。