XIAO ESP32S3-Sense 图像分类
在这里我们将使用 XIAO ESP32S3-Sense 构建一个 tinyML 项目来分类照片中的狗和猫。让我们开始吧。
工作原理
我们在 XIAO 上运行机器学习模型并向其提供摄像头流。然后 XIAO 推理结果并在我们实现的板载神经网络的帮助下进行预测。让我们构建一个。

所需物品
- XIAO ESP32-Sense
- <32GB MicroSD 卡
- Type-C 数据线
- Arduino IDE
- Edge Impulse 账户
- 使用 arduino-esp32 版本 2.x,因为它与 3.x 不兼容。
- 启用 PSRAM 以启用摄像头模块/功能。
步骤 1. 收集猫和狗的图像
机器学习项目的第一步是收集数据集,这里我们需要收集狗和猫的图像。在这里,我们可以通过两种方法收集图像。
- 直接从 XIAO-ESP32S3 Sense 收集图像并保存到 SD 卡,然后上传到 Edge Impulse
- 直接通过手机、互联网或开放数据集收集图像,然后上传到 Edge Impulse。
1.1 方法 1:通过 XIAO-ESP32S3 Sense 收集图像
在这里我们使用 sense 摄像头模块收集图像并保存到 SD 卡,然后稍后我们将上传到 EdgeImpulse。
1.1.1 连接摄像头
如果您正在购买 XIAO ESP32S3 Sense,那么您还应该包含一个扩展板。这个扩展板有一个 1600*1200 OV2640 摄像头传感器、板载 SD 卡插槽和数字麦克风。
通过将扩展板与 XIAO ESP32S3 Sense 安装,您可以使用扩展板上的功能。
安装扩展板非常简单,您只需要将扩展板上的连接器与 XIAO ESP32S3 上的 B2B 连接器对齐,用力按下并听到"咔嗒"声,安装就完成了。
我们现在在货架上有一个新的完全兼容 XIAO ESP32S3 Sense 的强大摄像头 OV5640,如果您购买它,您可以更换摄像头来使用它。
- 步骤 1. 根据您的操作系统下载并安装稳定版本的 Arduino IDE。
1.1.2 在 Arduino 上安装 XIAO-ESP32S3 Sense
-
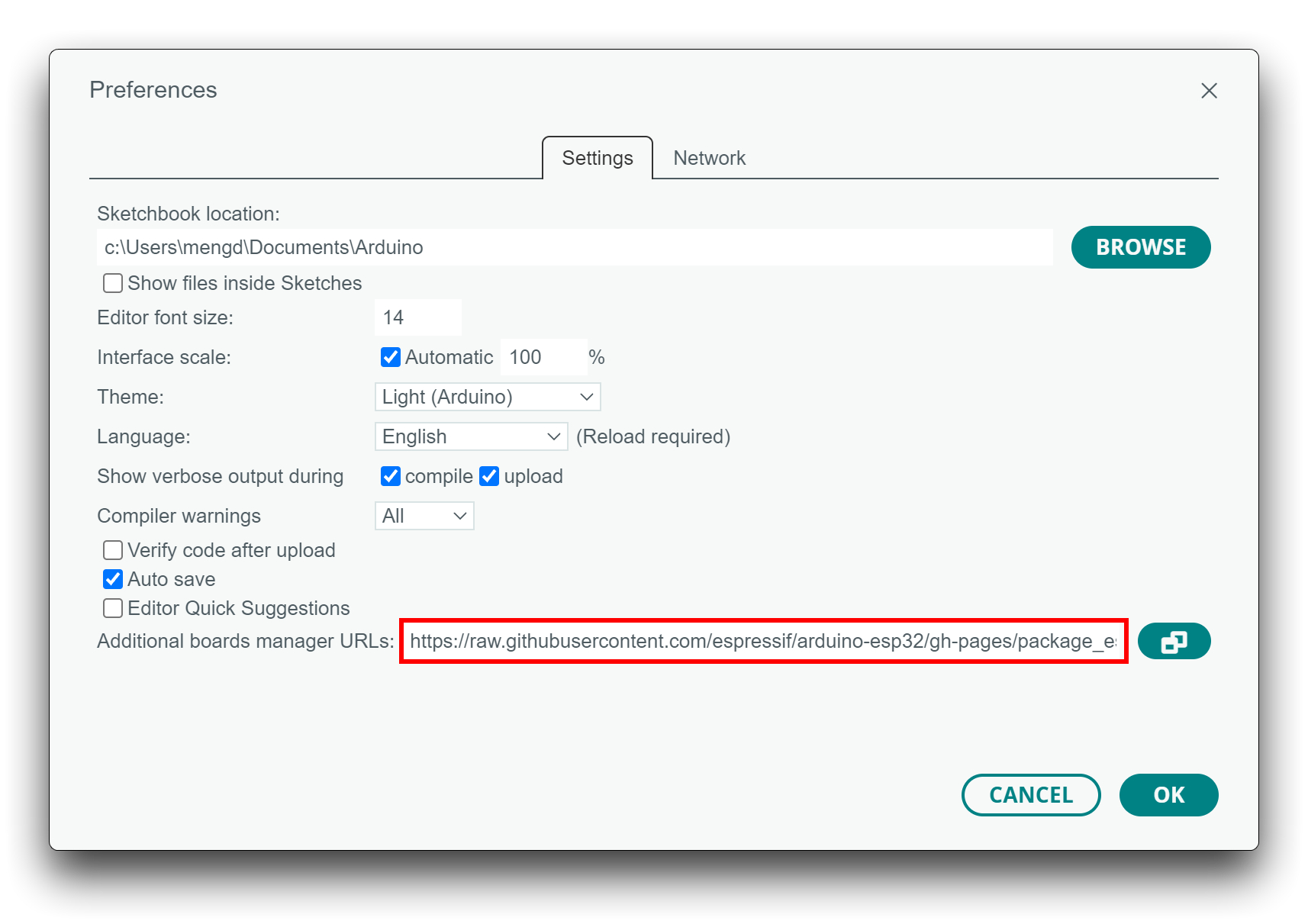
步骤 1. 将 ESP32 开发板包添加到您的 Arduino IDE。
导航到 文件 > 首选项,并在 "附加开发板管理器网址" 中填入以下网址: https://raw.githubusercontent.com/espressif/arduino-esp32/gh-pages/package_esp32_index.json
导航到 工具 > 开发板 > 开发板管理器...,在搜索框中输入关键词 esp32,选择最新版本的 esp32,并安装它。
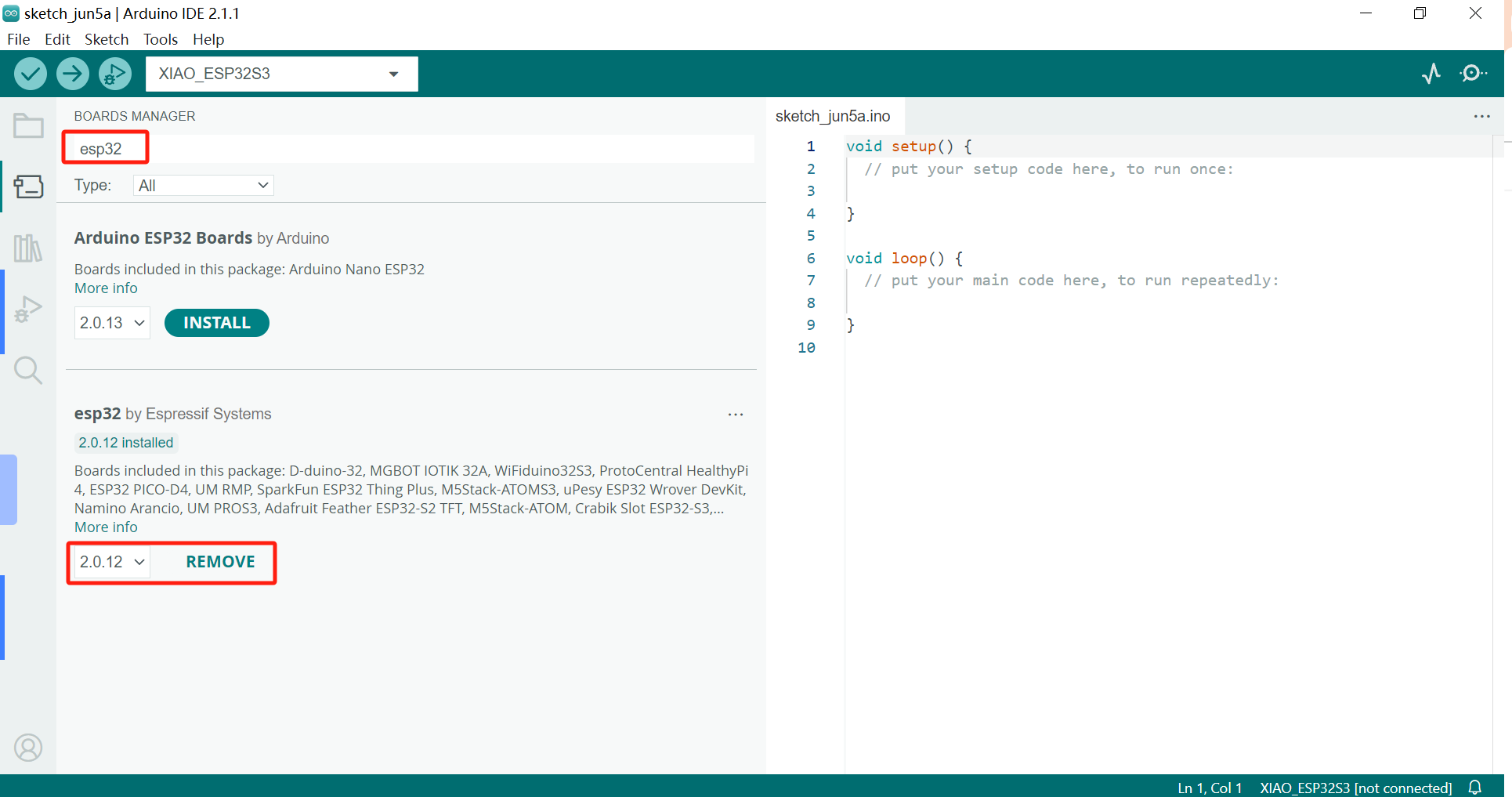
XIAO ESP32S3 的板载包至少需要版本 2.0.8 才能使用。
- 步骤 2. 选择您的开发板和端口。
在 Arduino IDE 的顶部,您可以直接选择端口。这很可能是 COM3 或更高(COM1 和 COM2 通常保留给硬件串口)。
另外,在左侧的开发板中搜索 xiao。选择 XIAO_ESP32S3。
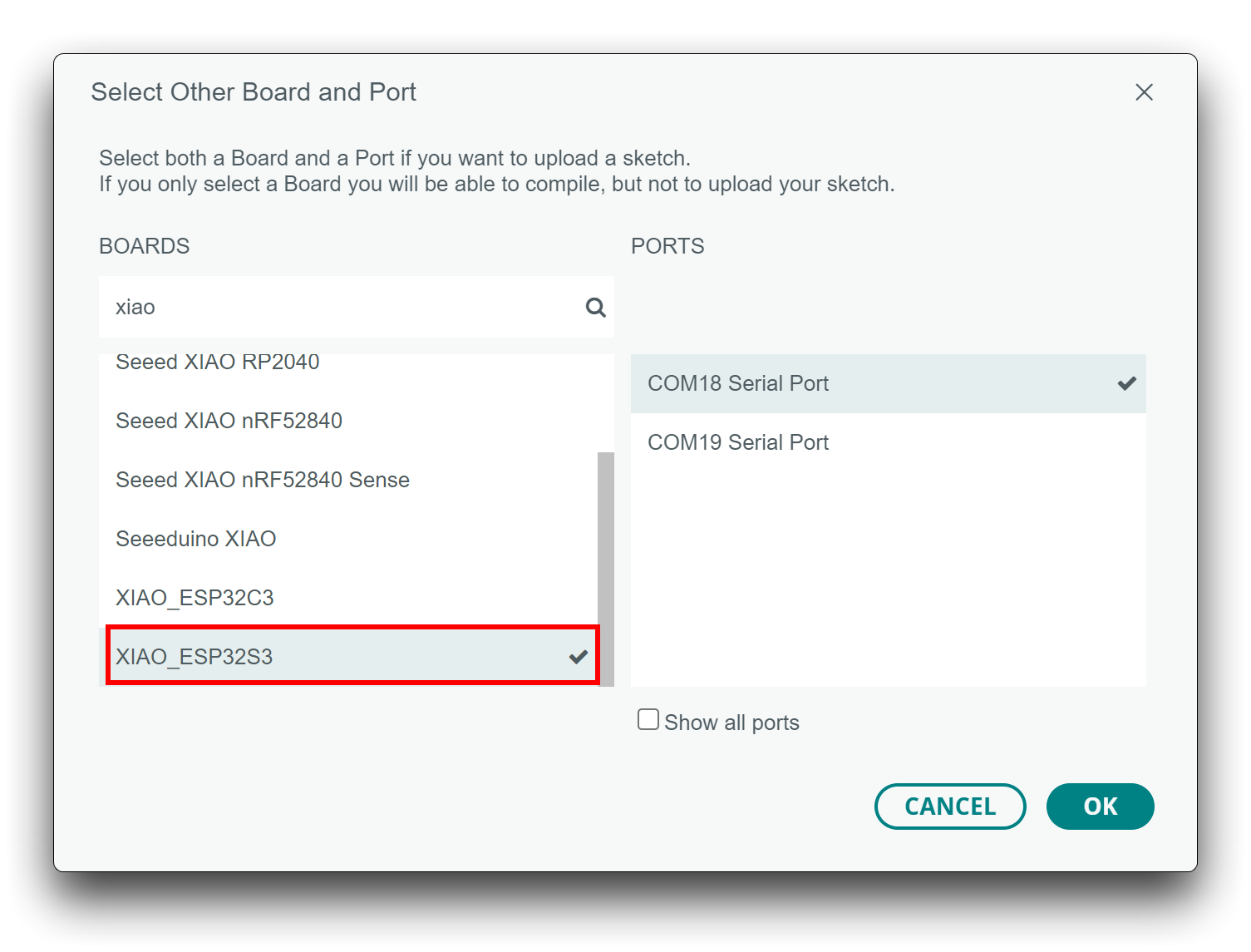
有了这个准备,您可以开始为 XIAO ESP32S3 编写程序来编译和上传。
1.1.3 上传可以拍照并保存到 SD 卡的代码
从这里下载代码文件,在您的计算机中解压并点击 "take_photos_command.ino" 打开代码。然后为 XIAO 选择正确的端口和开发板进行上传。

在拍照时,确保指向我们需要收集作为数据集的图像或对象。

由于这是图像分类,我们需要收集尽可能多的图像来使系统更加稳定。所以收集更多可爱的狗和猫的图像。
1.2 方法 2:直接上传图像到 EdgeImpulse
对于这种方法,我们需要从互联网或通过手机收集图像。幸运的是,我们有像 Kaggle 这样的服务为我们提供狗和猫图像的数据集,请查看这里。
一旦您收集了数据集,打开您的 EdgeImpulse 项目并转到 Data acquisition,选择 + Add data,然后选择 Upload data 选项。
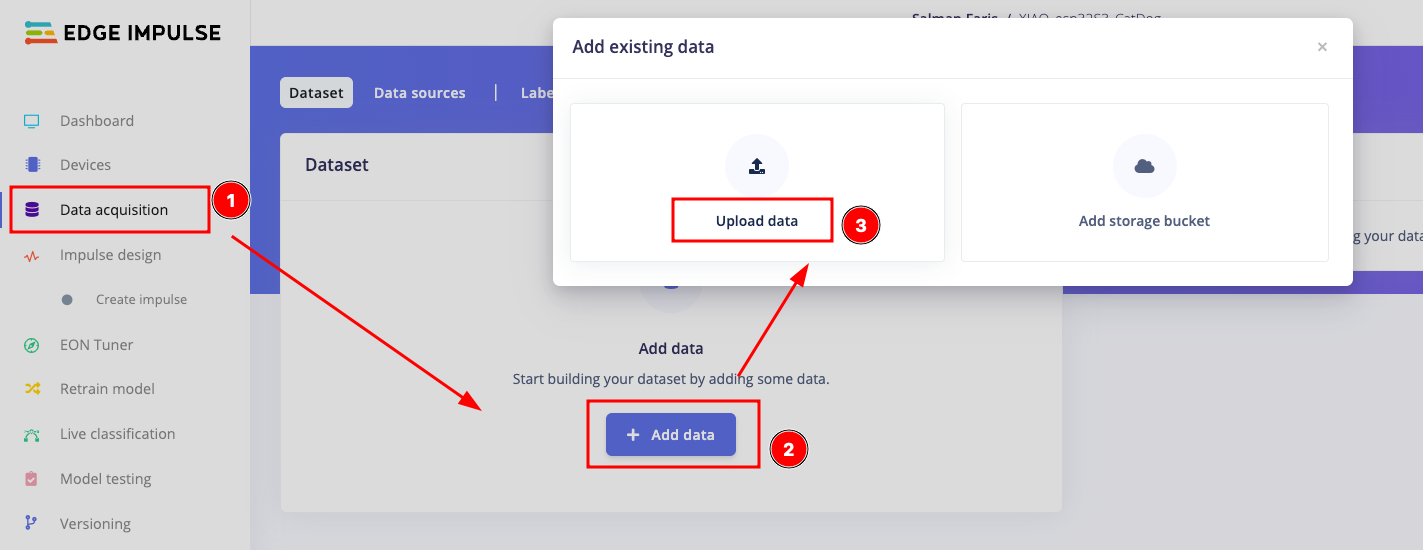
在页面中,选择上传模式为 "Select a folder",然后从下面的选项中选择文件。确保选择 "Automaticlly split between training and testing" 和标签为 "Infer from file name"

上传完成后,您可以看到如下窗口。

步骤 2. 设计脉冲并训练我们的神经网络
为您的项目收集数据后,您现在可以创建您的脉冲。一个完整的脉冲将由 3 个主要构建块组成:输入块、处理块和学习块。
- 要设计脉冲,在 Impulse design 下选择 Create an impulse。
- 输入块:输入块指示您用于训练模型的输入数据类型。这可以是时间序列(音频、振动、运动)或图像。这里我们选择图像数据作为输入块
- 处理块:处理块基本上是一个特征提取器。它由用于提取我们模型学习特征的 DSP(数字信号处理)操作组成。这些操作根据项目中使用的数据类型而有所不同。这里我们使用 EdgeImpulse 预构建的图像作为处理块。
- 学习块:添加处理块后,现在是时候添加学习块来完成您的脉冲了。学习块简单来说就是一个经过训练以学习您数据的神经网络。这里我们使用迁移学习(图像),它将在您的数据上微调预训练的图像分类模型。即使使用相对较小的图像数据集也能获得良好的性能。
- 设计脉冲后,点击 save impulse 继续。

步骤 2.1:使用处理块进行特征提取
这里我们将使用 DSP(数字信号处理)操作来提取我们模型学习的特征。这些操作根据项目中使用的数据类型而有所不同。首先我们需要设置如下所述的参数。

设置参数后,我们需要生成特征,点击 generate features 开始操作。

生成特征后,我们需要配置经过训练以学习您数据的神经网络。这里我们使用迁移学习(图像),它将在您的数据上微调预训练的图像分类模型。即使使用相对较小的图像数据集也能获得良好的性能。选择如下所述的神经网络并点击 Start Training。这将需要一些时间,您需要等待。

训练完成后,我们准备下载创建的 tinyML 库。转到 Deployment option 并选择 Arduino library 作为部署,点击 Build 生成库。

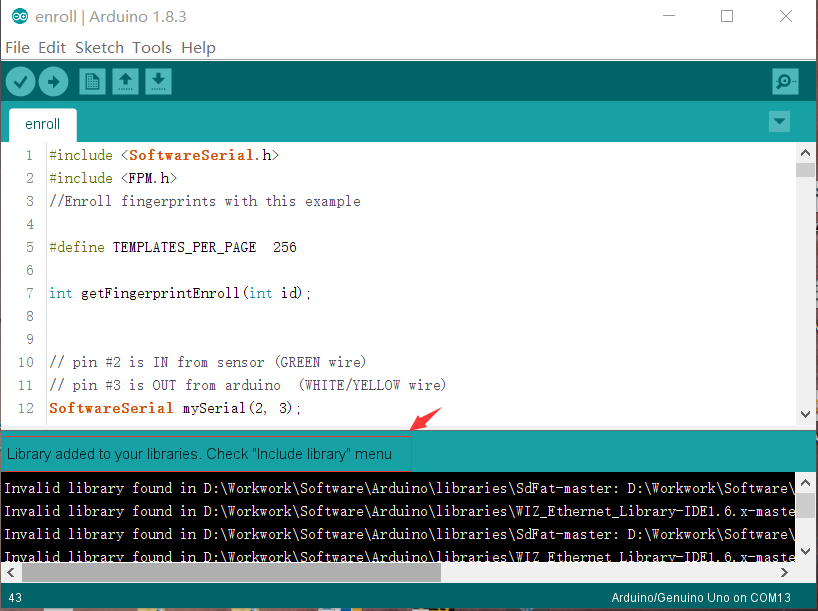
库将自动下载。之后,将其添加到 arduino IDE。打开您的 Arduino IDE,点击 Sketch > Include Library > Add .ZIP Library。

选择您刚刚下载的 zip 文件,如果库安装正确,您将在通知窗口中看到 Library added to your libraries。这意味着库已成功安装。
步骤 3. 运行示例代码
复制下面的推理代码并粘贴到您的 Arduino IDE 中。
/* Edge Impulse Arduino examples
* Copyright (c) 2022 EdgeImpulse Inc.
*
* Permission is hereby granted, free of charge, to any person obtaining a copy
* of this software and associated documentation files (the "Software"), to deal
* in the Software without restriction, including without limitation the rights
* to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
* copies of the Software, and to permit persons to whom the Software is
* furnished to do so, subject to the following conditions:
*
* The above copyright notice and this permission notice shall be included in
* all copies or substantial portions of the Software.
*
* THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
* IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
* FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
* AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
* LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
* OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
* SOFTWARE.
*/
/* Includes ---------------------------------------------------------------- */
#include <XIAO_esp32S3_CatDog2_inferencing.h>
#include "edge-impulse-sdk/dsp/image/image.hpp"
#include "esp_camera.h"
// Select camera model - find more camera models in camera_pins.h file here
// https://github.com/espressif/arduino-esp32/blob/master/libraries/ESP32/examples/Camera/CameraWebServer/camera_pins.h
#define CAMERA_MODEL_XIAO_ESP32S3 // Has PSRAM
#define PWDN_GPIO_NUM -1
#define RESET_GPIO_NUM -1
#define XCLK_GPIO_NUM 10
#define SIOD_GPIO_NUM 40
#define SIOC_GPIO_NUM 39
#define Y9_GPIO_NUM 48
#define Y8_GPIO_NUM 11
#define Y7_GPIO_NUM 12
#define Y6_GPIO_NUM 14
#define Y5_GPIO_NUM 16
#define Y4_GPIO_NUM 18
#define Y3_GPIO_NUM 17
#define Y2_GPIO_NUM 15
#define VSYNC_GPIO_NUM 38
#define HREF_GPIO_NUM 47
#define PCLK_GPIO_NUM 13
#define LED_GPIO_NUM 21
/* Constant defines -------------------------------------------------------- */
#define EI_CAMERA_RAW_FRAME_BUFFER_COLS 320
#define EI_CAMERA_RAW_FRAME_BUFFER_ROWS 240
#define EI_CAMERA_FRAME_BYTE_SIZE 3
/* Private variables ------------------------------------------------------- */
static bool debug_nn = false; // Set this to true to see e.g. features generated from the raw signal
static bool is_initialised = false;
uint8_t *snapshot_buf; //points to the output of the capture
static camera_config_t camera_config = {
.pin_pwdn = PWDN_GPIO_NUM,
.pin_reset = RESET_GPIO_NUM,
.pin_xclk = XCLK_GPIO_NUM,
.pin_sscb_sda = SIOD_GPIO_NUM,
.pin_sscb_scl = SIOC_GPIO_NUM,
.pin_d7 = Y9_GPIO_NUM,
.pin_d6 = Y8_GPIO_NUM,
.pin_d5 = Y7_GPIO_NUM,
.pin_d4 = Y6_GPIO_NUM,
.pin_d3 = Y5_GPIO_NUM,
.pin_d2 = Y4_GPIO_NUM,
.pin_d1 = Y3_GPIO_NUM,
.pin_d0 = Y2_GPIO_NUM,
.pin_vsync = VSYNC_GPIO_NUM,
.pin_href = HREF_GPIO_NUM,
.pin_pclk = PCLK_GPIO_NUM,
//XCLK 20MHz or 10MHz for OV2640 double FPS (Experimental)
.xclk_freq_hz = 20000000,
.ledc_timer = LEDC_TIMER_0,
.ledc_channel = LEDC_CHANNEL_0,
.pixel_format = PIXFORMAT_JPEG, //YUV422,GRAYSCALE,RGB565,JPEG
.frame_size = FRAMESIZE_QVGA, //QQVGA-UXGA Do not use sizes above QVGA when not JPEG
.jpeg_quality = 12, //0-63 lower number means higher quality
.fb_count = 1, //if more than one, i2s runs in continuous mode. Use only with JPEG
.fb_location = CAMERA_FB_IN_PSRAM,
.grab_mode = CAMERA_GRAB_WHEN_EMPTY,
};
/* Function definitions ------------------------------------------------------- */
bool ei_camera_init(void);
void ei_camera_deinit(void);
bool ei_camera_capture(uint32_t img_width, uint32_t img_height, uint8_t *out_buf) ;
/**
* @brief Arduino setup function
*/
void setup()
{
// put your setup code here, to run once:
Serial.begin(115200);
//comment out the below line to start inference immediately after upload
while (!Serial);
Serial.println("Edge Impulse Inferencing Demo");
if (ei_camera_init() == false) {
ei_printf("Failed to initialize Camera!\r\n");
}
else {
ei_printf("Camera initialized\r\n");
}
ei_printf("\nStarting continious inference in 2 seconds...\n");
ei_sleep(2000);
}
/**
* @brief Get data and run inferencing
*
* @param[in] debug Get debug info if true
*/
void loop()
{
// instead of wait_ms, we'll wait on the signal, this allows threads to cancel us...
if (ei_sleep(5) != EI_IMPULSE_OK) {
return;
}
snapshot_buf = (uint8_t*)malloc(EI_CAMERA_RAW_FRAME_BUFFER_COLS * EI_CAMERA_RAW_FRAME_BUFFER_ROWS * EI_CAMERA_FRAME_BYTE_SIZE);
// check if allocation was successful
if(snapshot_buf == nullptr) {
ei_printf("ERR: Failed to allocate snapshot buffer!\n");
return;
}
ei::signal_t signal;
signal.total_length = EI_CLASSIFIER_INPUT_WIDTH * EI_CLASSIFIER_INPUT_HEIGHT;
signal.get_data = &ei_camera_get_data;
if (ei_camera_capture((size_t)EI_CLASSIFIER_INPUT_WIDTH, (size_t)EI_CLASSIFIER_INPUT_HEIGHT, snapshot_buf) == false) {
ei_printf("Failed to capture image\r\n");
free(snapshot_buf);
return;
}
// Run the classifier
ei_impulse_result_t result = { 0 };
EI_IMPULSE_ERROR err = run_classifier(&signal, &result, debug_nn);
if (err != EI_IMPULSE_OK) {
ei_printf("ERR: Failed to run classifier (%d)\n", err);
return;
}
// print the predictions
ei_printf("Predictions (DSP: %d ms., Classification: %d ms., Anomaly: %d ms.): \n",
result.timing.dsp, result.timing.classification, result.timing.anomaly);
#if EI_CLASSIFIER_OBJECT_DETECTION == 1
bool bb_found = result.bounding_boxes[0].value > 0;
for (size_t ix = 0; ix < result.bounding_boxes_count; ix++) {
auto bb = result.bounding_boxes[ix];
if (bb.value == 0) {
continue;
}
ei_printf(" %s (%f) [ x: %u, y: %u, width: %u, height: %u ]\n", bb.label, bb.value, bb.x, bb.y, bb.width, bb.height);
}
if (!bb_found) {
ei_printf(" No objects found\n");
}
#else
for (size_t ix = 0; ix < EI_CLASSIFIER_LABEL_COUNT; ix++) {
ei_printf(" %s: %.5f\n", result.classification[ix].label,
result.classification[ix].value);
}
#endif
#if EI_CLASSIFIER_HAS_ANOMALY == 1
ei_printf(" anomaly score: %.3f\n", result.anomaly);
#endif
free(snapshot_buf);
}
/**
* @brief Setup image sensor & start streaming
*
* @retval false if initialisation failed
*/
bool ei_camera_init(void) {
if (is_initialised) return true;
#if defined(CAMERA_MODEL_ESP_EYE)
pinMode(13, INPUT_PULLUP);
pinMode(14, INPUT_PULLUP);
#endif
//initialize the camera
esp_err_t err = esp_camera_init(&camera_config);
if (err != ESP_OK) {
Serial.printf("Camera init failed with error 0x%x\n", err);
return false;
}
sensor_t * s = esp_camera_sensor_get();
// initial sensors are flipped vertically and colors are a bit saturated
if (s->id.PID == OV3660_PID) {
s->set_vflip(s, 1); // flip it back
s->set_brightness(s, 1); // up the brightness just a bit
s->set_saturation(s, 0); // lower the saturation
}
#if defined(CAMERA_MODEL_M5STACK_WIDE)
s->set_vflip(s, 1);
s->set_hmirror(s, 1);
#elif defined(CAMERA_MODEL_ESP_EYE)
s->set_vflip(s, 1);
s->set_hmirror(s, 1);
s->set_awb_gain(s, 1);
#endif
is_initialised = true;
return true;
}
/**
* @brief Stop streaming of sensor data
*/
void ei_camera_deinit(void) {
//deinitialize the camera
esp_err_t err = esp_camera_deinit();
if (err != ESP_OK)
{
ei_printf("Camera deinit failed\n");
return;
}
is_initialised = false;
return;
}
/**
* @brief Capture, rescale and crop image
*
* @param[in] img_width width of output image
* @param[in] img_height height of output image
* @param[in] out_buf pointer to store output image, NULL may be used
* if ei_camera_frame_buffer is to be used for capture and resize/cropping.
*
* @retval false if not initialised, image captured, rescaled or cropped failed
*
*/
bool ei_camera_capture(uint32_t img_width, uint32_t img_height, uint8_t *out_buf) {
bool do_resize = false;
if (!is_initialised) {
ei_printf("ERR: Camera is not initialized\r\n");
return false;
}
camera_fb_t *fb = esp_camera_fb_get();
if (!fb) {
ei_printf("Camera capture failed\n");
return false;
}
bool converted = fmt2rgb888(fb->buf, fb->len, PIXFORMAT_JPEG, snapshot_buf);
esp_camera_fb_return(fb);
if(!converted){
ei_printf("Conversion failed\n");
return false;
}
if ((img_width != EI_CAMERA_RAW_FRAME_BUFFER_COLS)
|| (img_height != EI_CAMERA_RAW_FRAME_BUFFER_ROWS)) {
do_resize = true;
}
if (do_resize) {
ei::image::processing::crop_and_interpolate_rgb888(
out_buf,
EI_CAMERA_RAW_FRAME_BUFFER_COLS,
EI_CAMERA_RAW_FRAME_BUFFER_ROWS,
out_buf,
img_width,
img_height);
}
return true;
}
static int ei_camera_get_data(size_t offset, size_t length, float *out_ptr)
{
// we already have a RGB888 buffer, so recalculate offset into pixel index
size_t pixel_ix = offset * 3;
size_t pixels_left = length;
size_t out_ptr_ix = 0;
while (pixels_left != 0) {
out_ptr[out_ptr_ix] = (snapshot_buf[pixel_ix] << 16) + (snapshot_buf[pixel_ix + 1] << 8) + snapshot_buf[pixel_ix + 2];
// go to the next pixel
out_ptr_ix++;
pixel_ix+=3;
pixels_left--;
}
// and done!
return 0;
}
#if !defined(EI_CLASSIFIER_SENSOR) || EI_CLASSIFIER_SENSOR != EI_CLASSIFIER_SENSOR_CAMERA
#error "Invalid model for current sensor"
#endif
确保将 #include <XIAO_esp32S3_CatDog2_inferencing.h> 替换为您生成的库。上传代码并指向猫或狗的图像或实际图像,我们可以在串口监视器中看到结果。
恭喜您 🙌 完成了 tinyML 图像分类项目。
资源
[PDF] ESP32-S3 数据手册
Seeed Studio XIAO ESP32S3
Seeed Studio XIAO ESP32S3 Sense
其他
其余开源资料正在整理中,敬请期待!
技术支持与产品讨论
感谢您选择我们的产品!我们在这里为您提供不同的支持,以确保您使用我们产品的体验尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。