使用 IsaacLab 训练 SoArm101 策略
介绍
本教程介绍如何使用 Isaac Lab 通过强化学习训练和测试 SO-ARM100/101 机械臂的策略。
📌 前置条件
- 一台带有 Nvidia GPU 的 Ubuntu 电脑
info
如果你没有安装 CUDA 驱动或 Conda,请先进行安装。
快速开始
🚀 步骤 1. 安装 Isaac Lab
NVIDIA Isaac™ Lab 是一个开源的统一 机器人学习 框架,帮助研究人员和开发人员高效训练机器人策略。
在 Ubuntu 终端中运行以下命令:
# 创建并激活 Conda 环境
conda create -n isaaclab python=3.10
conda activate isaaclab
# 安装 PyTorch (GPU 版本)
pip install torch==2.7.0 torchvision==0.22.0 --index-url https://download.pytorch.org/whl/cu128
# 升级 pip
pip install --upgrade pip
# 安装 Isaac Sim(包含扩展)
pip install 'isaacsim[all,extscache]==4.5.0' --extra-index-url https://pypi.nvidia.com
# 克隆 IsaacLab 仓库
cd ~/Documents
git clone https://github.com/isaac-sim/IsaacLab.git
# 安装依赖
sudo apt install cmake build-essential
# 初始化设置
cd IsaacLab
./isaaclab.sh --install
运行以下命令验证安装:
./isaaclab.sh -p scripts/tutorials/00_sim/create_empty.py
如果成功,将会出现一个空白的 Isaac Sim 窗口。
🤖 步骤 2. 安装 isaac_so_arm101 项目
此仓库基于 Isaac Lab 为 SO-ARM100 和 SO-ARM101 机器人实现任务。它是 LycheeAI Hub 系列教程项目 SO-ARM101 × Isaac Sim × Isaac Lab 的基础。
运行以下命令:
cd ~/Documents
git clone https://github.com/MuammerBay/isaac_so_arm101.git
cd isaac_so_arm101
# 安装项目依赖
python -m pip install -e source/SO_100
# 测试环境
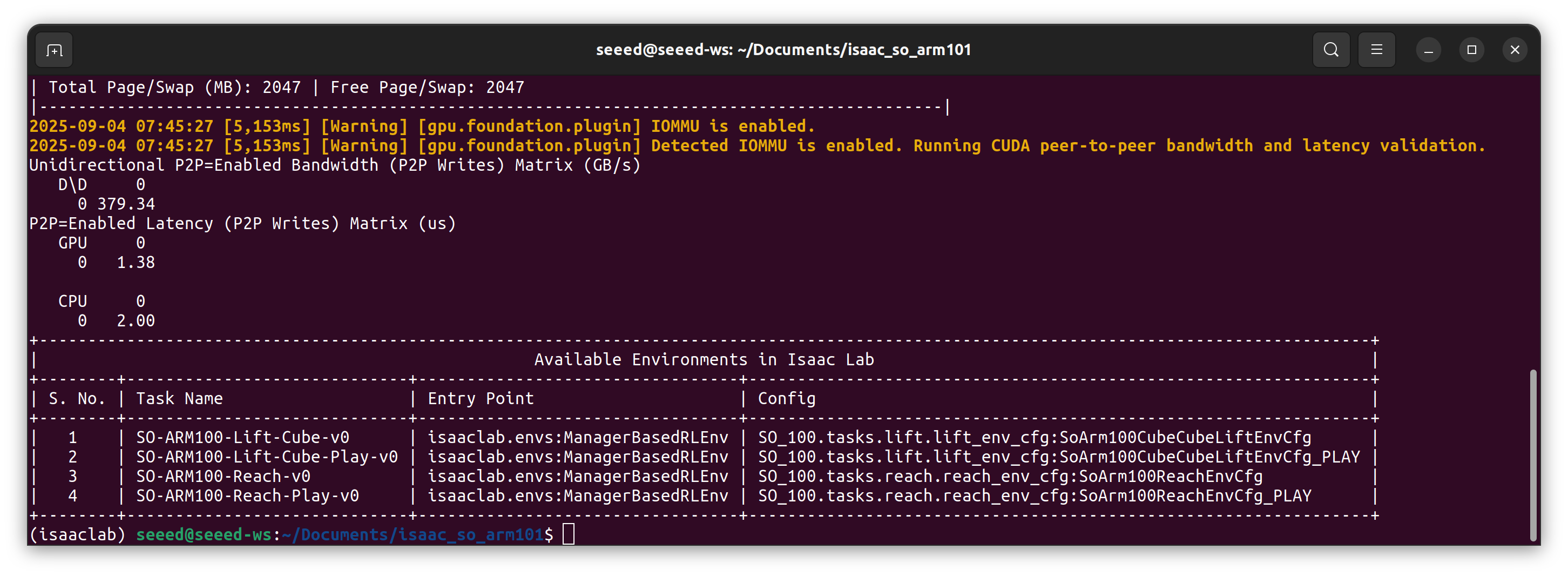
python scripts/list_envs.py
如果 isaac_so_arm101 项目安装成功,终端窗口将打印如下日志:
🎯 步骤 3. 开始训练
使用以下命令启动训练:
python scripts/rsl_rl/train.py --task SO-ARM100-Reach-v0
此时会打开一个 Isaac Sim 窗口,可以实时观察训练过程。你也可以在启动命令后添加 --headless 参数来加速训练过程。
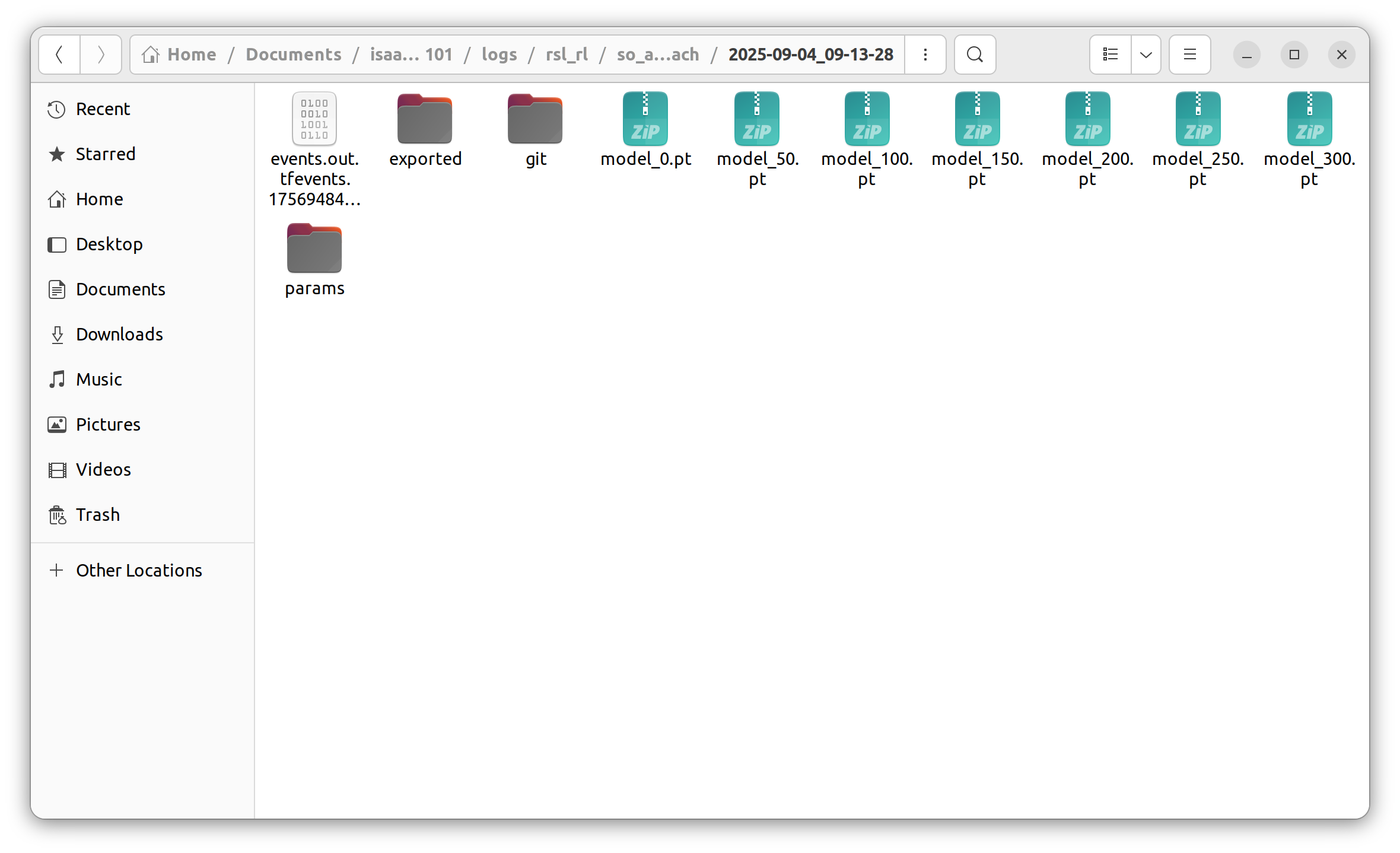
训练完成后,模型权重将保存在:
~/Documents/isaac_so_arm101/logs/rsl_rl/so_arm100_reach
🧪 步骤 4. 测试模型
使用以下命令测试训练好的模型:
python scripts/rsl_rl/play.py --task SO-ARM100-Reach-Play-v0
在测试过程中,目标位置将在预设范围内随机生成,训练好的模型将驱动机械臂去触碰这些目标。
参考资料
- https://lycheeai-hub.com/project-so-arm101-x-isaac-sim-x-isaac-lab-tutorial-series
- https://github.com/MuammerBay/isaac_so_arm101
- https://github.com/huggingface/lerobot
- https://github.com/isaac-sim/IsaacLab
- https://github.com/leggedrobotics/rsl_rl
技术支持与产品讨论
感谢您选择我们的产品!我们将为您提供多种支持,确保您的使用体验尽可能顺畅。我们提供多种交流渠道,以满足不同的偏好和需求。