使用 OpenClaw 控制 reCamera Gimbal
介绍
本项目通过将 OpenClaw Agent 框架与 Seeed Studio 的 reCamera Gimbal 边缘 AI 相机深度集成,成功打破了虚拟大模型与物理世界之间的壁垒。
依托 reCamera 强大的 RISC-V 架构、内置的 Node-RED 低代码环境以及 1 TOPS 的边缘算力,我们为 OpenClaw 开发了一套专用的底层交互 Skill。
现在,大模型不再是只能在屏幕上打字的“瓶中之脑”。它拥有可以主动 360° 旋转的“脖子”、能够看见物理世界的“眼睛”(图像采集 + VLM 分析)、可以改变环境的“手”(LED 控制),以及用于双向交互的“耳朵和嘴巴”(麦克风和扬声器)。
下面是完成本示例后的使用效果。
硬件准备
一台 reCamera Gimbal 一台电脑
| reCamera Gimbal |
|---|
 |
1. 在电脑上安装 OpenClaw
在安装前需要先安装 Git 和 nodejs。如果是 Windows10 用户,还需要安装 Visual Studio,如果未安装会报错。
请访问 OpenClaw 官网查看详细安装教程:OpenClaw-Personal AI Assistant
安装完成后,你可以直接进入网页尝试与它聊天。如果此时可以正常获得反馈,那么说明你已经成功安装并配置好 OpenClaw,请继续按步骤往下操作。如果安装 OpenClaw 出现问题,请自行排查原因并解决。
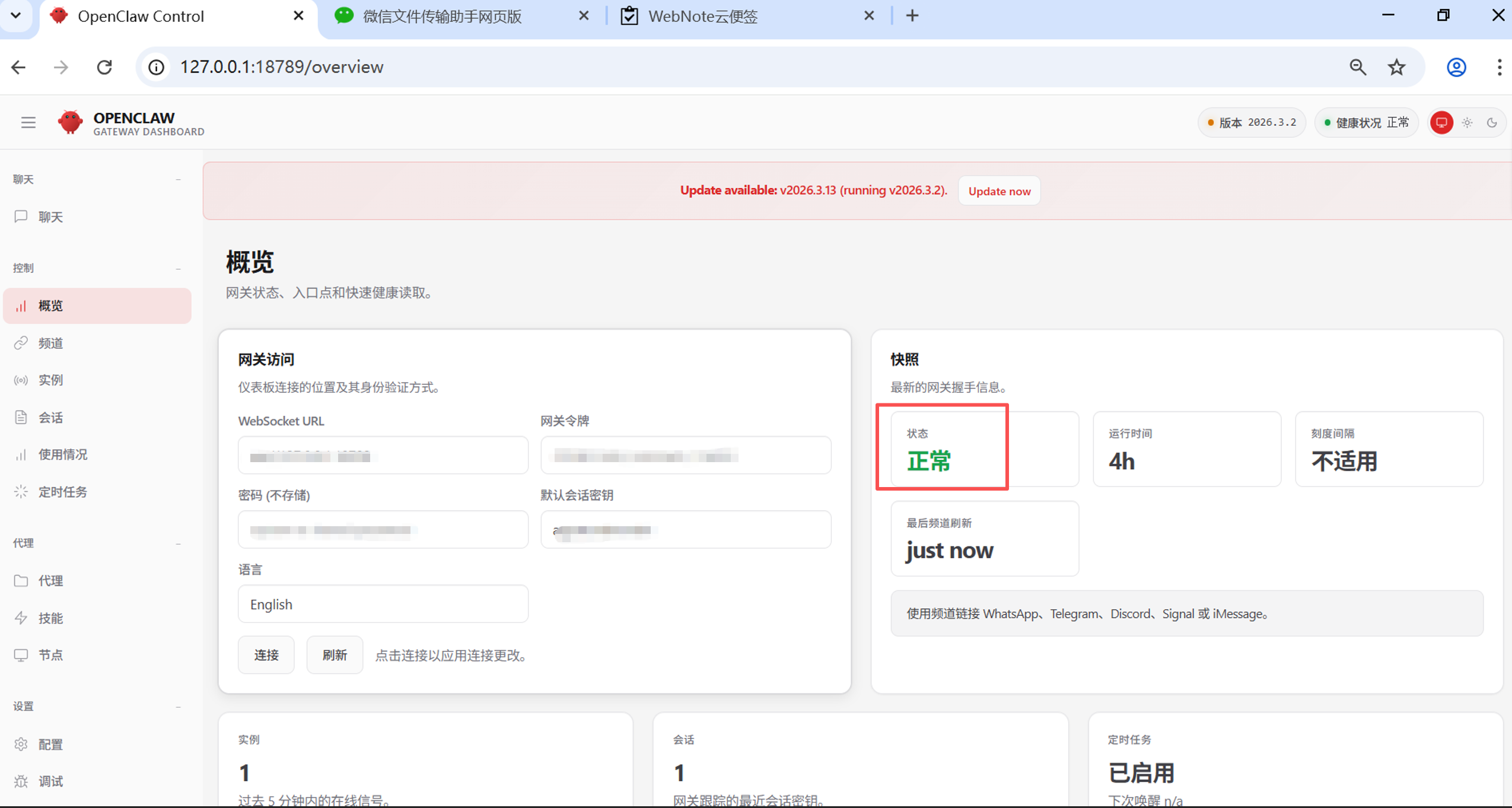
你也可以点击左侧的 "Overview" 页面,查看 "Status" 是否正常。
2. 导入 reCamera Gimbal 的 Skills
2.1 新建 skills 文件夹
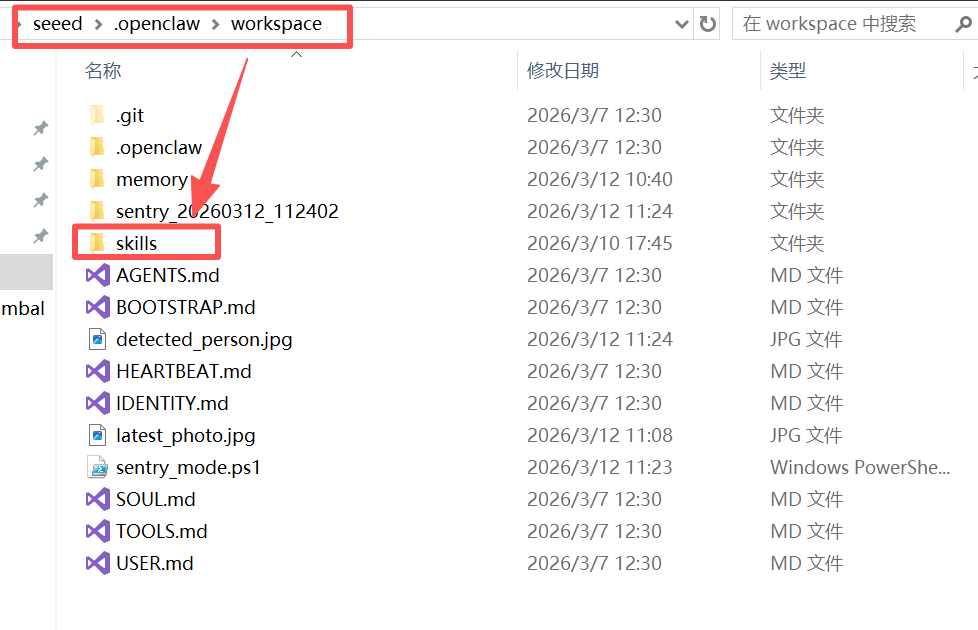
在安装 OpenClaw 的文件夹中找到 workspace,并在该路径下新建一个名为 "skills" 的文件夹。
2.2 在 GitHub 上下载 reCamera Gimbal 项目
项目地址为:
https://github.com/Seeed-Projects/reCamera_Gimbal-OpenClaw
下载并解压后,将项目中的 "recamera-gimbal" 文件夹放入步骤 2.1 中创建的 "skills" 文件夹内。

2.3 配置 openclaw.json
openclaw.json 位于你安装 OpenClaw 的文件夹中。该文件包含了访问 AI 模型所需的全部配置。你需要做的是将以下关于 reCamera Gimbal 的内容添加到 openclaw.json 中:
-
将 "C :\ Users\seeed\.openclaw\workspace\skills" 替换为你实际的 skills 文件夹路径
-
将 "192.168.31.198" 替换为你实际的 reCamera Gimbal 所在 IP 地址
-
将 "recamera.1" 替换为你 reCamera Gimbal 的实际密码
"skills": {
"load": {
"extraDirs": [
"C:\\Users\\seeed\\.openclaw\\workspace\\skills"
]
},
"entries": {
"recamera-gimbal": {
"enabled": true,
"env": {
"RECAMERA_IP": "192.168.31.198",
"RECAMERA_PASS": "recamera.1"
}
}
}
}
如果你想编写自己的 Skills,请参考官方编写规范
3. 打开 SenseCraft 部署应用
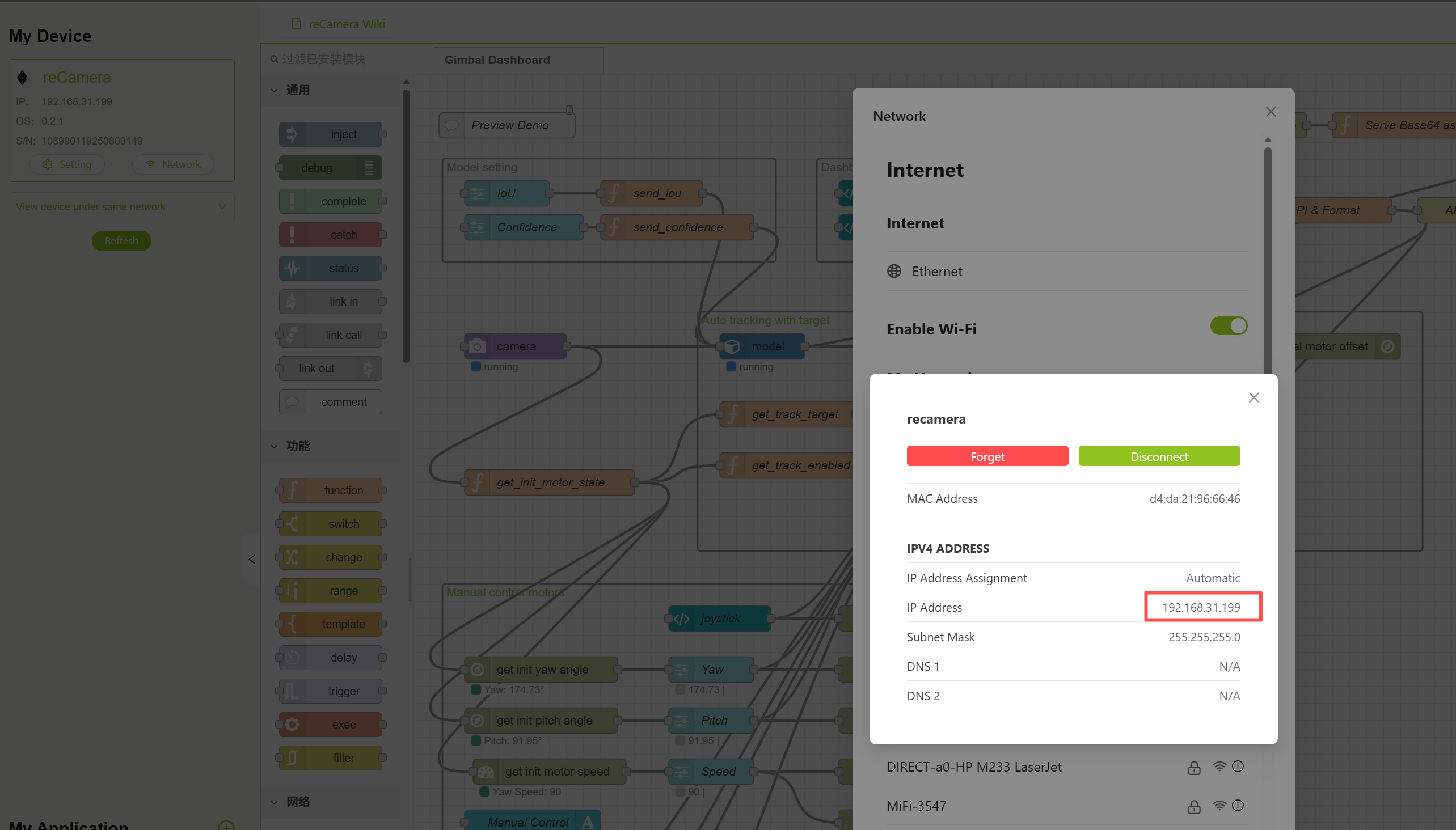
3.1 设置 reCamera Gimbal
首先,不要接入 reCamera Gimbal 的电源,直接用 Type-C 连接电脑,并访问 192.168.42.1。进入后,点击左下角的 "Login to SenseCraft"。登录后,为其连接 WiFi,确保连接的 WiFi 与电脑相同。然后查看 reCamera Gimbal 的 IP 地址,复制该 IP 地址并访问,确认是否可以正常访问。
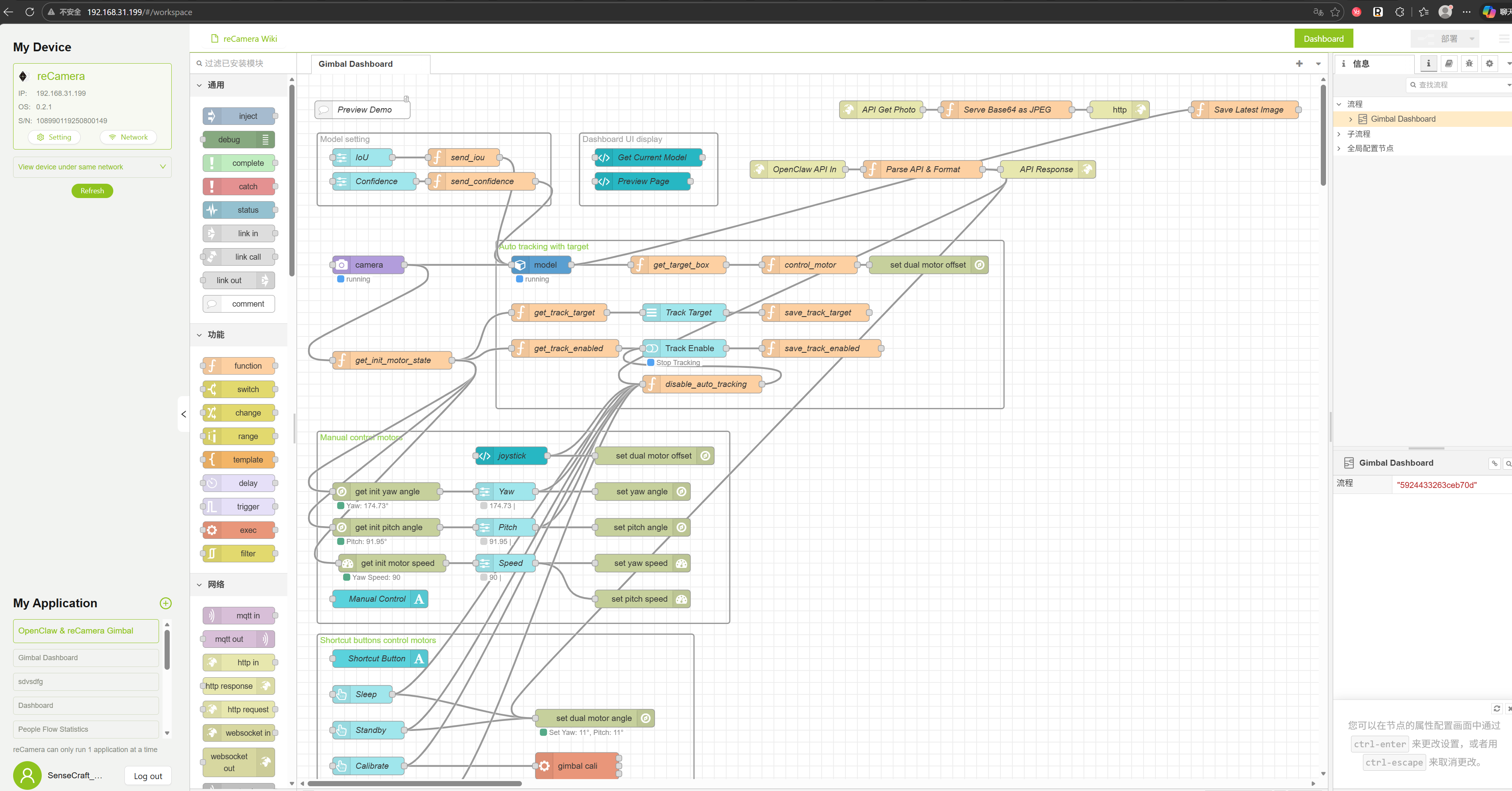
3.2 部署应用
打开 SenseCraft 的 Application,找到名为 "OpenClaw & reCamera Gimbal" 的项目,点击 "Deploy Application"-"Visit Workspace Via USB",部署完成后你看到的工作流应如下图所示:
4. 测试电机和拍照
然后拔掉 Type-C 线,插上 12V 电源,等待 reCamera Gimbal 自动校准完成,在浏览器中重新访问刚才的 IP 地址,进入 reCamera Gimbal 的界面,并确保 Node-RED 已经正常启动运行。接下来,我们测试拉出的两个 HTTP 接口是否可以正常工作:
4.1 测试电机
先测试云台电机是否正常,请将 "<DEVICE_IP>" 替换为你 reCamera Gimbal 的真实 IP:
http://<DEVICE_IP>:1880/api/gimbal?yaw=120&pitch=90
如果一切正常,那么当你访问该网址时,你会看到 reCamera Gimbal 的电机发生转动,你也可以将 120 和 90 替换为其他角度。
4.2 测试拍照
然后测试拍照是否正常,请将 "<DEVICE_IP>" 替换为你 reCamera Gimbal 的真实 IP:
http://<DEVICE_IP>:1880/api/photo
如果一切正常,那么当你访问该 URL 时,你可以在网页中看到 reCamera Gimbal 此刻拍摄到的图像。
请确保 reCamera Gimbal 和你的电脑连接在同一个 WiFi 下
5. 在 OpenClaw 中测试
在测试前我们需要确认两件事:
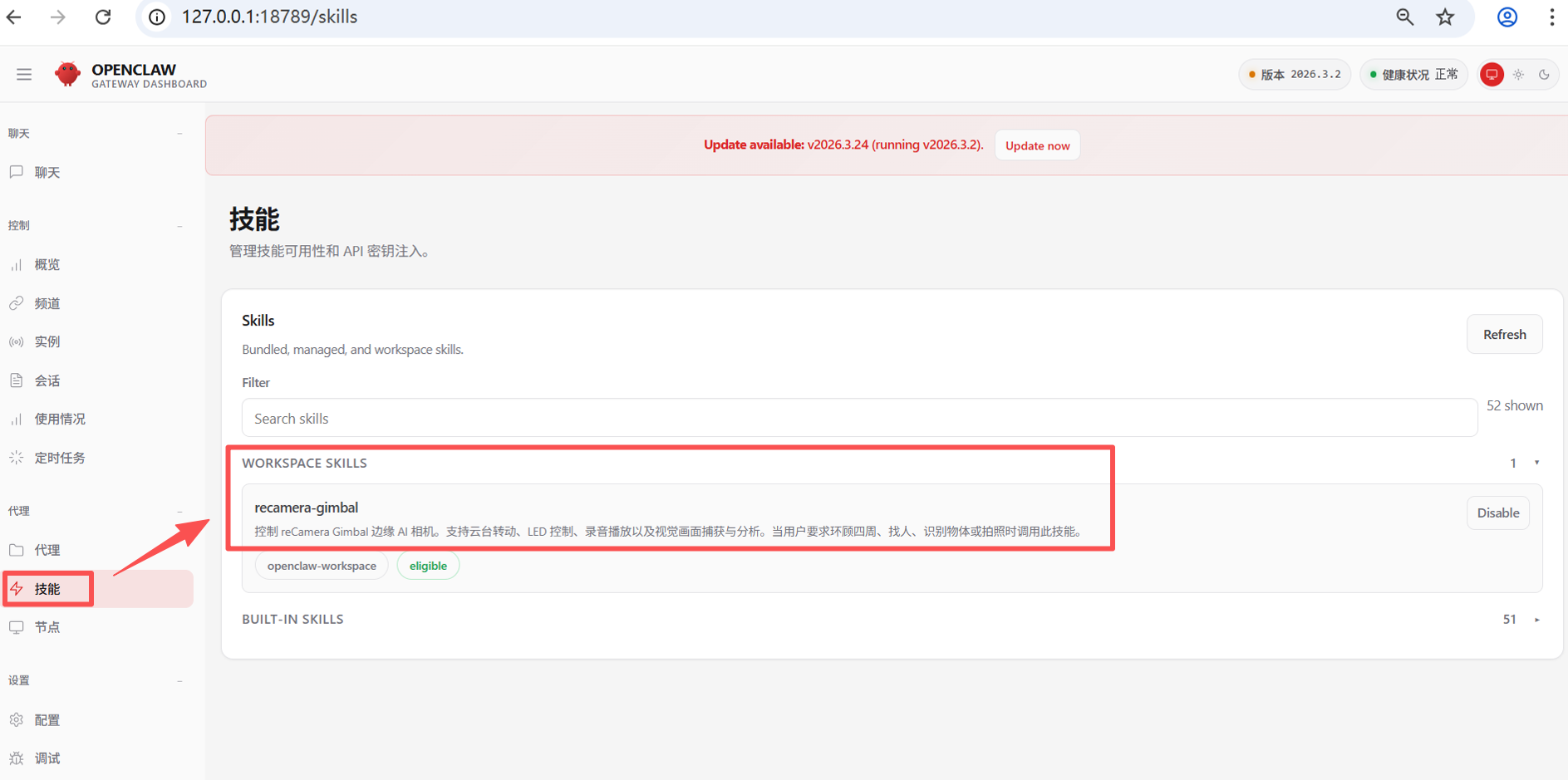
5.1 确保你的 Skills 配置正确
如果你已经按照步骤 2 配置好 Skills,在 OpenClaw 界面中,点击左侧的 "Skills",再点击 "WORKSPACE SKILLS",你应该可以看到你在本地配置好的 "recamera-gimbal"。
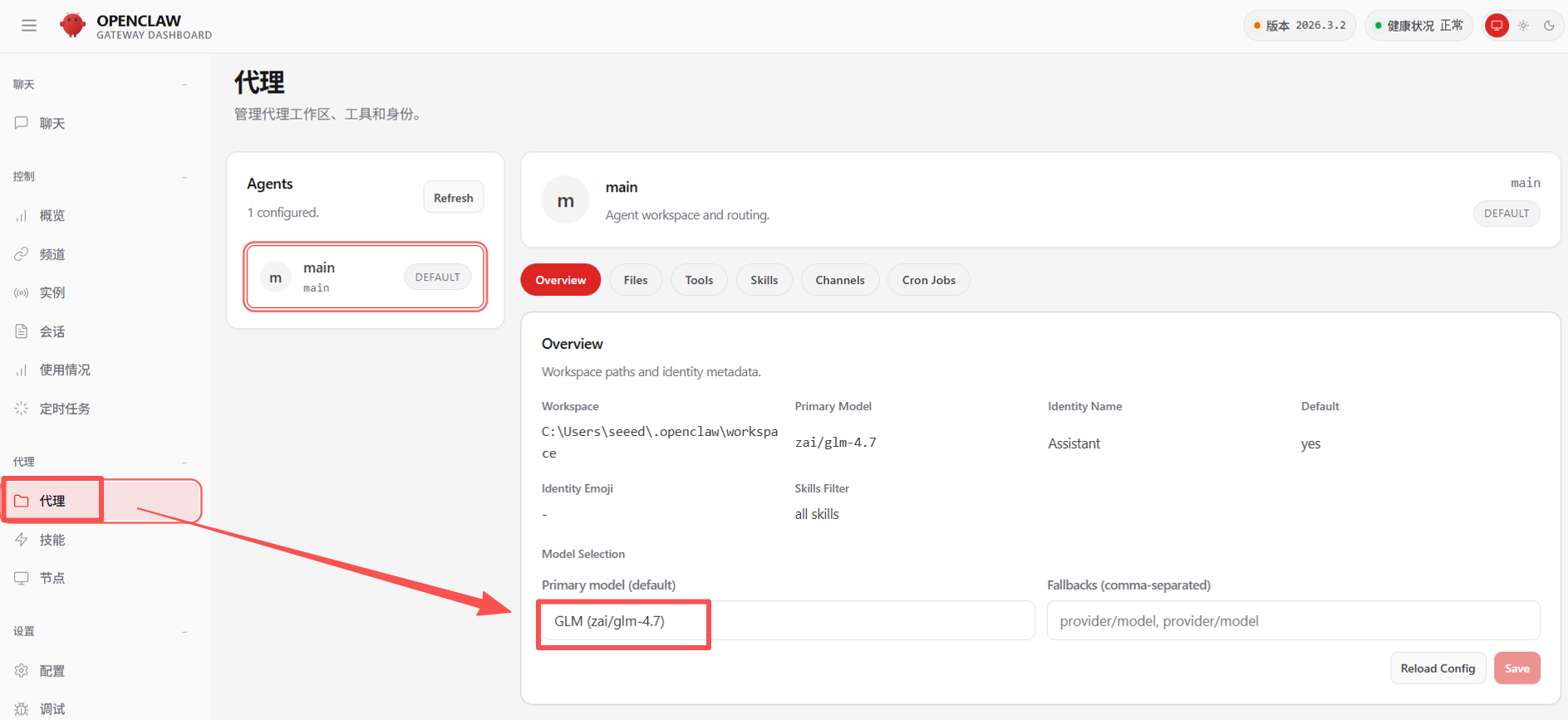
5.2 确保你的模型配置正确
请确保你的模型配置正确。点击左侧的 "Agent" 后,你可以在 "Primary model" 下看到你配置的模型。我这里使用的是 GLM4.7 模型。
5.3 开始使用 OpenClaw Gimbal 控制你的 reCamera
请直接在聊天窗口对 OpenClaw 说“打开相机的 LED 灯”、“环顾四周看看有没有人”、“录制一段 5s 的音频并播放”等任务,或者你也可以尝试更复杂的任务,例如:“打开 reCamera 的哨兵模式(快速环顾四周,将一次扫描周期,也就是一圈扫描控制在 6s 内),如果画面中出现穿白色 T 恤的人,就打开相机补光灯并播放 test.wav 音频,分析画面内容并将图片保存到本地”,然后稍等片刻,观察 reCamera Gimbal 的反应。
OpenClaw 执行任务会比较慢,复杂指令大约需要两三分钟才能看到效果,所以请耐心等待,这是正常现象。
技术支持与产品讨论
感谢你选择我们的产品!我们为你提供多种支持方式,以确保你在使用产品的过程中尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。