使用 Nvidia Jetson Thor 语音控制 reBot Arm B601
介绍
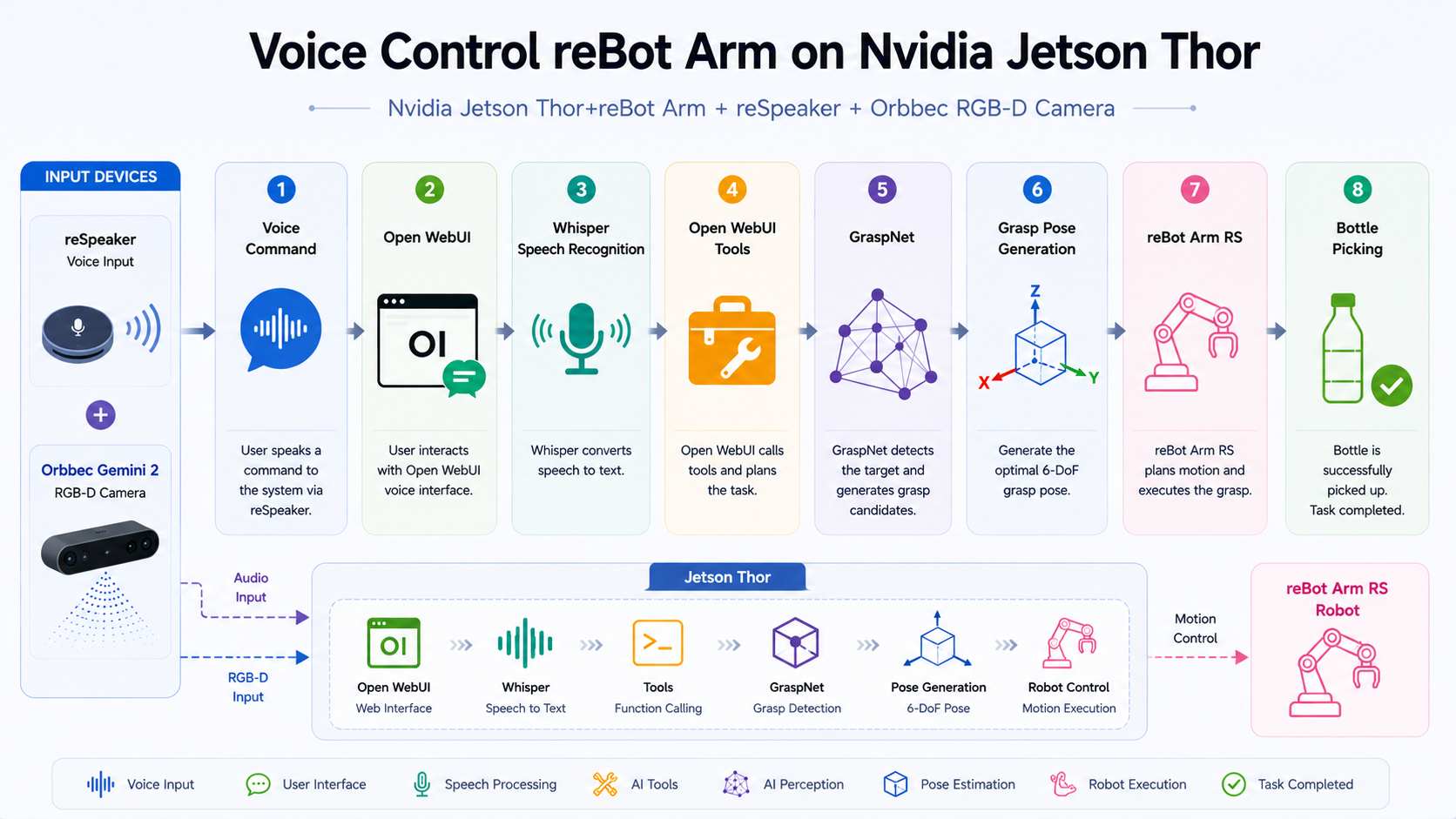
大型语言模型(LLMs)通过支持自然语言交互,让机器人系统变得更加直观。结合机器人视觉和抓取规划,用户可以使用简单的语音指令来控制机器人。

在本教程中,我们将在 NVIDIA Jetson Thor 平台上部署一个完整的语音控制机械臂抓取系统。
特性
- 在 Jetson Thor 上完全本地推理
- 使用 Whisper 进行语音交互
- 由 Ollama 驱动的本地大语言模型
- 基于浏览器的 OpenWebUI 界面
- 使用 GraspNet 的 6 自由度抓取检测
- 实时机械臂控制
工作流程
硬件准备
所需硬件
- Nvidia Jetson Thor(已安装 JetPack 7.x)
- reBot Arm B601 DM
- USB-to-CAN adapter
- Orbbec Gemini 2 RGBD 相机
- reSpeaker
- 机械臂电源和 USB 线缆
- USB 按钮(可选)
| reBot Arm B601 | NVIDIA® Jetson AGX Thor™ Developer Kit | Orbbec Gemini 2 RGBD Camera | reSpeaker Flex XVF3800 Linear-4 |
|---|---|---|---|
 |  |  |  |
硬件连接
- 将相机连接到 Jetson Thor 的 USB 接口。
- 通过 CAN2USB 模块将 reBot Arm RS 连接到 Jetson Thor。
- 将 USB 麦克风连接到 Jetson Thor。
- 打开所有设备电源。
安装 Ollama
步骤 1. 安装 Ollama
curl -fsSL https://ollama.com/install.sh | sh
步骤 2. 下载语言模型
ollama pull nemotron3:33b
步骤 3. 验证 Ollama
ollama run nemotron3:33b
部署 OpenWebUI
步骤 1. 启动 OpenWebUI
docker run -d -p 4000:8080 \
--add-host=host.docker.internal:host-gateway \
-e OLLAMA_BASE_URL=http://host.docker.internal:11434 \
-v open-webui_tt:/app/backend/data --name open-webui_tt \
ghcr.io/open-webui/open-webui:main
注意:官方的 Open WebUI Docker 镜像不包含按键说话(按钮触发语音录制)功能。如果你希望启用按键说话功能,请改用下面的 Docker 镜像。
步骤 2. 访问界面
打开浏览器并访问:
http://<Jetson-IP>:3000
步骤 3. 连接 Ollama
在 OpenWebUI 中配置 Ollama 的端点。
http://host.docker.internal:11434
如果 Open WebUI 无法正常连接 Ollama,请修改 Ollama 的 systemd 服务配置,然后重启 Ollama 服务: /etc/systemd/system/ollama.service
[Unit]
Description=Ollama Service
After=network-online.target
[Service]
ExecStart=/usr/local/bin/ollama serve
User=ollama
Group=ollama
Restart=always
RestartSec=3
Environment="PATH=/home/seeed/.local/bin:/home/seeed/.local/bin:/home/seeed/.nvm/versions/node/v22.22.2/bin:/usr/local/sbin:/usr/local/bin:/usr/sbin:/usr/bin:/sbin:/bin:/usr/games:/usr/local/games:/snap/bin"
Environment="OLLAMA_HOST=0.0.0.0:11434"
[Install]
WantedBy=default.target
步骤 4. 配置工具
Workspace --> Tools --> New Tool
robot arm tools
"""
title: Grasp Web Robot Arm
author: seeedstudio
version: 0.3.0
description: Open WebUI tools for controlling grasp_web.py robot arm HTTP API.
requirements: requests
"""
import os
import requests
from typing import Dict, Any, List, Optional
class Tools:
def __init__(self):
self.base_url = os.getenv(
"GRASP_BASE", "http://host.docker.internal:8090"
).rstrip("/")
self.timeout = float(os.getenv("GRASP_TIMEOUT", "20"))
def _json_or_text(self, r: requests.Response):
try:
return r.json()
except Exception:
return r.text
def _get(self, path: str) -> Dict[str, Any]:
try:
r = requests.get(f"{self.base_url}{path}", timeout=self.timeout)
return {
"ok": r.ok,
"status_code": r.status_code,
"data": self._json_or_text(r),
}
except Exception as e:
return {"ok": False, "error": str(e)}
def _post(self, path: str, payload: Optional[dict] = None) -> Dict[str, Any]:
try:
r = requests.post(
f"{self.base_url}{path}",
json=payload or {},
timeout=self.timeout,
)
return {
"ok": r.ok,
"status_code": r.status_code,
"data": self._json_or_text(r),
}
except Exception as e:
return {"ok": False, "error": str(e)}
# -------------------------
# 状态查询
# -------------------------
def robot_state(self) -> Dict[str, Any]:
"""
读取机器人状态:关节角度、末端位姿、夹爪状态,包括位置、速度、力矩、是否夹住。
这是只读操作,不会驱动机械臂。
"""
return self._get("/robot/state")
# -------------------------
# 基础操作
# -------------------------
def reset_robot(self) -> Dict[str, Any]:
"""
复位机器人:停止当前执行、松开夹爪、机械臂回原点。
注意:这会驱动真实机械臂运动。
"""
return self._post("/reset", {})
def move_ready(self) -> Dict[str, Any]:
"""
移动机械臂到预定义就绪位:张开夹爪并移动到就绪姿态。
注意:这会驱动真实机械臂运动。
"""
return self._post("/ready", {})
# -------------------------
# 目标类别设置
# -------------------------
def set_target_class(self, class_name: str) -> Dict[str, Any]:
"""
设置目标类别,例如 bottle、cup、apple。
设置后后端会自动触发推理更新。
传入空字符串 "" 可以取消类别过滤,扫描全场所有检测到的物体。
"""
if class_name is None:
return {"ok": False, "error": "class_name must be a string"}
return self._post("/target", {"class_name": class_name})
def clear_target_filter(self) -> Dict[str, Any]:
"""
取消目标类别过滤,扫描全场所有检测到的物体。
"""
return self._post("/target", {"class_name": ""})
# -------------------------
# 夹爪控制
# -------------------------
def gripper_state(self) -> Dict[str, Any]:
"""
读取夹爪状态:位置、速度、力矩、是否夹住。
这是只读操作,不会驱动机械臂。
"""
return self._post("/gripper", {"action": "state"})
def gripper_open(self, distance_m: float = 0.09) -> Dict[str, Any]:
"""
张开夹爪到指定距离。
参数:
- distance_m: 张开距离,单位米,默认 0.09
注意:这会驱动真实夹爪。
"""
if distance_m < 0:
return {"ok": False, "error": "distance_m must be >= 0"}
return self._post(
"/gripper",
{
"action": "open",
"distance_m": distance_m,
},
)
def gripper_close(self) -> Dict[str, Any]:
"""
闭合夹爪,使用非阻塞力矩模式。
注意:这会驱动真实夹爪。
"""
return self._post("/gripper", {"action": "close"})
def gripper_release(self) -> Dict[str, Any]:
"""
释放夹爪,松开并解除 HOLDING 状态。
注意:这会驱动真实夹爪。
"""
return self._post("/gripper", {"action": "release"})
# -------------------------
# 关节控制
# -------------------------
def joint_jog(
self,
joint: str,
delta_deg: float,
duration_s: float = 2.0,
safety_margin_deg: float = 5.0,
) -> Dict[str, Any]:
"""
单关节点动控制。
参数:
- joint: joint1 ~ joint6
- delta_deg: 相对旋转角度,单位度。正数为正方向,负数为负方向
- duration_s: 运动时间,单位秒
- safety_margin_deg: 限位安全边距,单位度
注意:这会驱动真实机械臂。
"""
valid_joints = {"joint1", "joint2", "joint3", "joint4", "joint5", "joint6"}
if joint not in valid_joints:
return {"ok": False, "error": "joint must be one of joint1 ~ joint6"}
if duration_s <= 0:
return {"ok": False, "error": "duration_s must be greater than 0"}
if safety_margin_deg < 0:
return {"ok": False, "error": "safety_margin_deg must be >= 0"}
return self._post(
"/joint/jog",
{
"joint": joint,
"delta_deg": delta_deg,
"duration_s": duration_s,
"safety_margin_deg": safety_margin_deg,
},
)
def move_joints(
self,
joints_rad: List[float],
duration_s: float = 3.0,
) -> Dict[str, Any]:
"""
一次性设置所有 6 个关节的绝对位置。
参数:
- joints_rad: 6 个关节角,单位弧度
- duration_s: 运动时间,单位秒
关节顺序:
[joint1, joint2, joint3, joint4, joint5, joint6]
注意:这会驱动真实机械臂。
"""
if not isinstance(joints_rad, list) or len(joints_rad) != 6:
return {"ok": False, "error": "joints_rad must be a list of 6 numbers"}
if duration_s <= 0:
return {"ok": False, "error": "duration_s must be greater than 0"}
return self._post(
"/joint/move",
{
"joints_rad": joints_rad,
"duration_s": duration_s,
},
)
def move_zero_joints(self) -> Dict[str, Any]:
"""
将所有关节移动到 0 位。
注意:这会驱动真实机械臂。
"""
return self.move_joints(
joints_rad=[0.0, 0.0, 0.0, 0.0, 0.0, 0.0],
duration_s=3.0,
)
def move_ready_joints(self) -> Dict[str, Any]:
"""
移动到示例就绪关节位:
[0.0, -1.0, -1.5, 0.5, 0.0, 0.0]
注意:这会驱动真实机械臂。
"""
return self.move_joints(
joints_rad=[0.0, -1.0, -1.5, 0.5, 0.0, 0.0],
duration_s=3.0,
)
# -------------------------
# 末端位姿控制
# -------------------------
def move_pose(
self,
x: float,
y: float,
z: float,
roll: float,
pitch: float,
yaw: float,
duration: float = 3.0,
) -> Dict[str, Any]:
"""
末端位姿控制。服务端会先做 IK 规划,不可达则返回错误。
参数:
- x, y, z: 末端位置,单位米
- roll, pitch, yaw: 末端姿态,单位弧度
- duration: 运动时间,单位秒
建议先调用 ready 或 joint/move 到可达位置后,再使用 move_pose。
注意:这会驱动真实机械臂。
"""
if duration <= 0:
return {"ok": False, "error": "duration must be greater than 0"}
return self._post(
"/move/pose",
{
"x": x,
"y": y,
"z": z,
"roll": roll,
"pitch": pitch,
"yaw": yaw,
"duration": duration,
},
)
def move_ready_pose(self) -> Dict[str, Any]:
"""
移动到默认末端就绪位:
x=0.25, y=0.0, z=0.35, roll=0.0, pitch=1.2, yaw=0.0
注意:这会驱动真实机械臂。
"""
return self.move_pose(
x=0.25,
y=0.0,
z=0.35,
roll=0.0,
pitch=1.2,
yaw=0.0,
duration=3.0,
)
def move_near_current_pose(self) -> Dict[str, Any]:
"""
移动到从零位出发通常可达的保守末端位:
x=0.260, y=0.0, z=0.20, roll=0.0, pitch=0.0, yaw=0.0
注意:这会驱动真实机械臂。
"""
return self.move_pose(
x=0.260,
y=0.0,
z=0.20,
roll=0.0,
pitch=0.0,
yaw=0.0,
duration=2.0,
)
# -------------------------
# 底座点动
# -------------------------
def base_jog(
self,
delta_deg: float,
duration_s: float = 2.0,
) -> Dict[str, Any]:
"""
底座点动。
参数:
- delta_deg: 底座旋转角度,单位度。正数为正方向,负数为负方向
- duration_s: 运动时间,单位秒
注意:这会驱动真实机械臂底座。
"""
if duration_s <= 0:
return {"ok": False, "error": "duration_s must be greater than 0"}
return self._post(
"/base_jog",
{
"delta_deg": delta_deg,
"duration_s": duration_s,
},
)
# -------------------------
# 一键自动抓取
# -------------------------
def auto_grasp(
self,
class_name: str = "bottle",
max_retries: int = 10,
retry_interval_s: float = 1.5,
) -> Dict[str, Any]:
"""
一键自动抓取。
流程:
1. 设置目标类别
2. 自动循环推理
3. 检测到目标后执行夹取
后端会在后台运行抓取流程。
可通过 robot_state 查看进度。
参数:
- class_name: 目标类别,例如 bottle。空字符串表示扫描全场
- max_retries: 最大重试次数
- retry_interval_s: 每次重试间隔,单位秒
注意:这会驱动真实机械臂。
"""
if max_retries <= 0:
return {"ok": False, "error": "max_retries must be greater than 0"}
if retry_interval_s <= 0:
return {"ok": False, "error": "retry_interval_s must be greater than 0"}
return self._post(
"/auto_grasp",
{
"class_name": class_name,
"max_retries": max_retries,
"retry_interval_s": retry_interval_s,
},
)
# -------------------------
# 视频流
# -------------------------
def stream_url(self) -> Dict[str, Any]:
"""
返回 MJPEG 视频流地址。
不会驱动机械臂。
"""
return {
"ok": True,
"stream_url": f"{self.base_url}/stream.mjpg",
}
部署 reBot Arm 后端服务
步骤 1. 安装系统软件包和 Miniconda
sudo apt update
sudo apt install -y git wget curl build-essential cmake libusb-1.0-0-dev python3-pip
wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-aarch64.sh
bash Miniconda3-latest-Linux-aarch64.sh
source ~/.bashrc
步骤 2. 克隆项目
git clone https://github.com/jjjadand/reBot-DevArm-Grasp.git rebot_grasp-jetson
cd rebot_grasp-jetson
如果你使用的是内部软件包而不是公共仓库,请将该项目目录复制到 Jetson 上,并在项目根目录下运行剩余命令。
步骤 3. 创建 Python 环境
在 JetPack 6.x 上使用 Python 3.10。在 JetPack 7.x / Thor 上使用 Python 3.12。
# JetPack 6.x
conda create -y -n graspnet python=3.10
# JetPack 7.x / Thor
# conda create -y -n graspnet python=3.12
conda activate graspnet
python -m pip install -U pip wheel setuptools
检查你的 JetPack 和 CUDA 版本:
cat /etc/nv_tegra_release
nvcc --version
步骤 4. 安装适用于 Jetson 的 PyTorch
不要在 Jetson 上安装通用的 PyPI CPU/GPU PyTorch 软件包。请安装与你的 JetPack、Python 和 CUDA 版本匹配的 wheel。对于 reComputer 用户,你也可以参考专门的指南:Install Pytorch for reComputer Jetson。
常见的起点包括:
# JetPack 6.x, CUDA 12.x, Python 3.10
pip install --extra-index-url https://pypi.jetson-ai-lab.io/jp6/cu126 torch torchvision
# JetPack 7.x / Thor, CUDA 13.x, Python 3.12
# pip install --extra-index-url https://pypi.jetson-ai-lab.io/sbsa/cu130 torch torchvision
在 Python 中验证 CUDA:
python - <<'PY'
import torch
print("torch:", torch.__version__)
print("cuda available:", torch.cuda.is_available())
print("device:", torch.cuda.get_device_name(0) if torch.cuda.is_available() else "none")
PY
在继续之前,cuda available 必须为 True。
步骤 5. 安装 Python 依赖
pip install -r requirements-graspnet-jetson.txt
步骤 6. 安装机器人、GraspNet 和 GraspNet API SDK
mkdir -p sdk
git clone https://github.com/vectorBH6/reBotArm_control_py.git sdk/reBotArm_control_py
pip install -e sdk/reBotArm_control_py
git clone https://github.com/graspnet/graspnet-baseline.git sdk/graspnet-baseline
git clone https://github.com/graspnet/graspnetAPI.git sdk/graspnetAPI
pip install -e sdk/graspnetAPI
从 GraspNet 下载页面下载 GraspNet 预训练 checkpoint,并将其放在这里:
sdk/graspnet-baseline/checkpoints/checkpoint-rs.tar
步骤 7. 设置 CUDA 路径并构建 GraspNet CUDA 算子
为你的 JetPack 版本设置 CUDA 路径:
# JetPack 6.x example
export CUDA_HOME=/usr/local/cuda-12.6
# JetPack 7.x / Thor example
# export CUDA_HOME=/usr/local/cuda-13.0
export PATH="$CUDA_HOME/bin:$PATH"
export LD_LIBRARY_PATH="$CUDA_HOME/lib64:$LD_LIBRARY_PATH"
构建 GraspNet 使用的 CUDA 扩展:
bash scripts/install_graspnet_cuda_ops.sh
bash scripts/install_graspnet_cuda_ops.sh --check
如果之后更改了 JetPack、Python、CUDA 或 PyTorch,请使用以下命令重新构建:
bash scripts/install_graspnet_cuda_ops.sh --force
步骤 8. 安装 Orbbec 相机 SDK
该项目包含一个辅助工具,用于将 pyorbbecsdk2 安装到当前激活的 Python 环境中:
bash scripts/install_pyorbbecsdk.sh
如果你需要在本地构建 SDK,请先克隆源码树并运行源码模式:
git clone https://github.com/orbbec/pyorbbecsdk.git sdk/pyorbbecsdk
bash scripts/install_pyorbbecsdk.sh --from-source
当 SDK 源码树可用时,安装 Orbbec udev 规则:
sudo bash sdk/pyorbbecsdk/scripts/env_setup/install_udev_rules.sh
sudo udevadm control --reload-rules
sudo udevadm trigger
步骤 9. 在目标 Jetson 上下载 YOLO 权重并导出 TensorRT
TensorRT 引擎文件是与设备相关的。务必在将要运行演示的 Jetson 上导出 .engine。
mkdir -p models
wget https://github.com/ultralytics/assets/releases/download/v8.3.0/yolo11n-seg.pt -O models/yolo11n-seg.pt
yolo export model=models/yolo11n-seg.pt format=engine imgsz=640 half=True device=0 workspace=4
预期输出为:
models/yolo11n-seg.engine
如果在你的平台上 FP16 导出失败,请在导出时去掉 half=True:
yolo export model=models/yolo11n-seg.pt format=engine imgsz=640 device=0 workspace=4
验证与标定
在尝试实际抓取之前,请按顺序运行以下检查。
1. 检查 RGB-D 相机
conda activate graspnet
cd ~/rebot_grasp-jetson
python scripts/verify_pyorbbec_stream.py
python scripts/verify_pyorbbec_stream.py --preview --seconds 10
纯文本检查应报告 RGB 和深度帧信息。预览检查在有桌面显示器可用时应显示 RGB 和深度窗口。
2. 检查机器人连接
首先以只读模式启动:
python scripts/verify_rebot_arm_motion.py --read-only
然后在确认机械臂运动路径安全后,运行一个小幅度的关节 6 点动:
python scripts/verify_rebot_arm_motion.py --deg 5
3. 检查 GraspNet 栈
python scripts/verify_graspnet_stack.py
如果相机尚未连接,但你只想检查 Python、CUDA、GraspNet 和 YOLO 文件:
python scripts/verify_graspnet_stack.py --skip-camera
4. 执行手眼标定(眼在手上)
本项目使用手眼标定:相机安装在末端执行器上,ArUco 标记固定在桌面上。默认配置期望使用 DICT_4X4_50、ID 0、0.1 m 的标记。仓库中包含可打印的标记文件,例如 aruco100x100.pdf。
自动采集:
python scripts/collect_handeye_eih.py
带重力补偿的手动采集:
python scripts/collect_handeye_eih.py --manual
标定结果保存在当前激活相机目录下:
config/calibration/orbbec_gemini2/hand_eye.npz
config/calibration/orbbec_gemini2/intrinsics.npz
验证已保存的标定结果:
python scripts/verify_handeye_calibration.py
每当相机支架、夹爪、ArUco 板尺寸或桌面几何形状发生变化时,都需要重新标定。
启动应用程序
Web UI 是推荐的首选用户界面。它提供实时 MJPEG 视频、目标选择、抓取预览、真实抓取执行、补偿调节、基座点动、夹爪控制、就绪姿态和复位操作。
先以预览模式启动。此模式不会执行真实的机器人运动:
conda activate graspnet
cd ~/rebot_grasp-jetson
python scripts/grasp_web.py \
--host 0.0.0.0 \
--port 8000 \
--num-point 12000 \
--cloud-crop-nsample 32
在浏览器中打开 Web UI:
http://<jetson_ip>:8000
使用预览模式确认相机视频流、YOLO 检测、目标过滤和抓取点生成。在 Web UI 中点击推理或刷新控件以更新 GraspNet 预览。
打开 Open WebUI 页面(http://<jetson_ip>:4000)。如果你在聊天中启用了 Robot Arm Tools,你可以直接使用自然语言命令控制机械臂。
功能演示
参考资料
- https://docs.nvidia.com/jetson/agx-thor-devkit/user-guide/latest/index.html
- https://github.com/Seeed-Projects/reBot-DevArm
- https://github.com/graspnet/graspnet-baseline.git
- https://github.com/vectorBH6/reBotArm_control_py
- https://github.com/orbbec/pyorbbecsdk.git
- https://wiki.seeedstudio.com/cn/install_torch_on_recomputer/
技术支持与产品讨论
感谢你选择我们的产品!我们将为你提供多种支持,确保你在使用我们产品的过程中尽可能顺利。我们提供多种沟通渠道,以满足不同的偏好和需求。