SenseCAP Watcher 硬件概述
在 Wiki 的这一部分中,我们将重点介绍 SenseCAP Watcher 的硬件组件、其构造以及附加配件的使用。
规格参数
| 硬件 | 描述 |
|---|---|
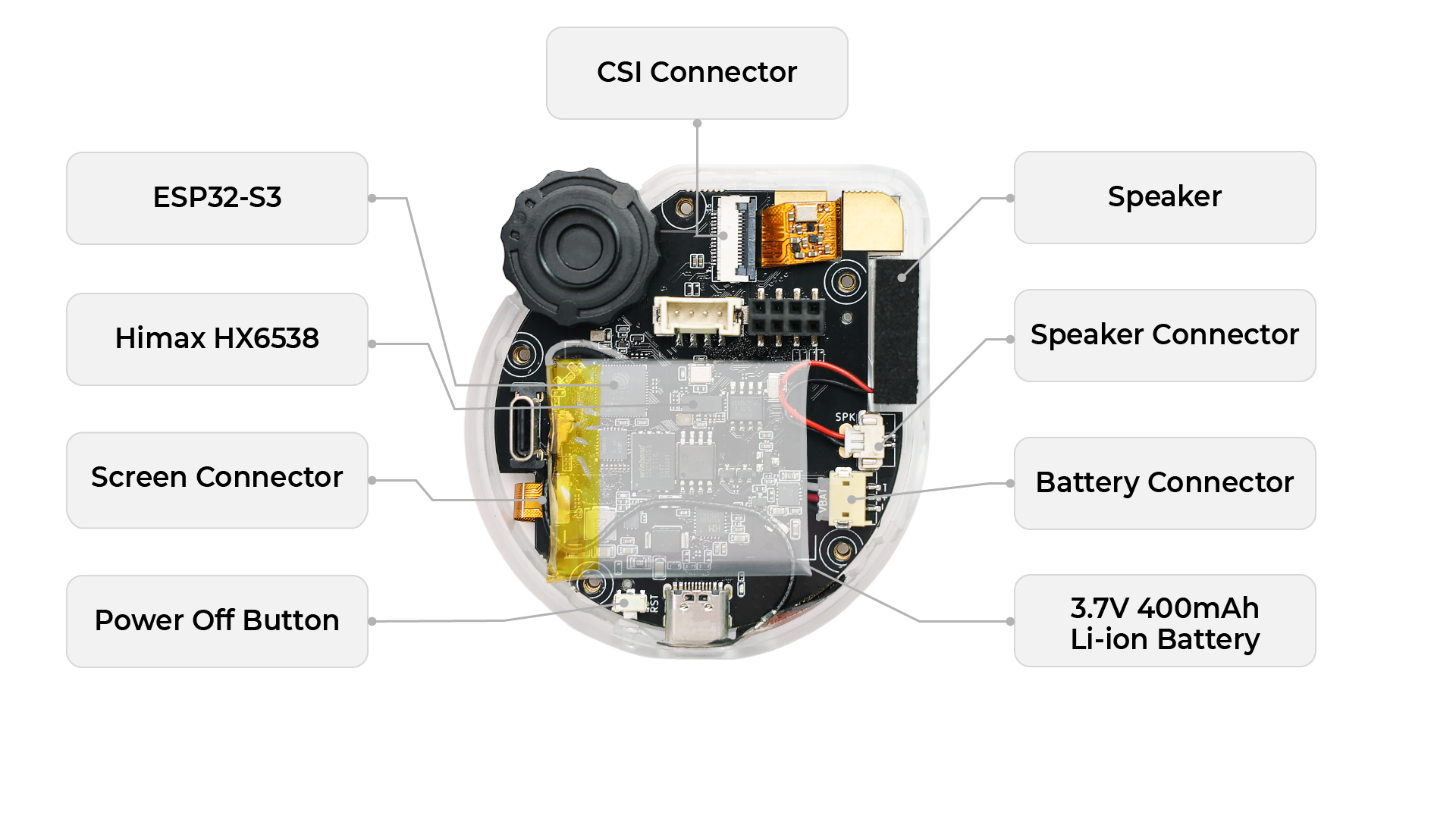
| MCU | ESP32-S3 @240MHz 8MB PSRAM |
| 内置AI处理器 | Himax HX6538 (Cortex M55 + Ethos-U55) |
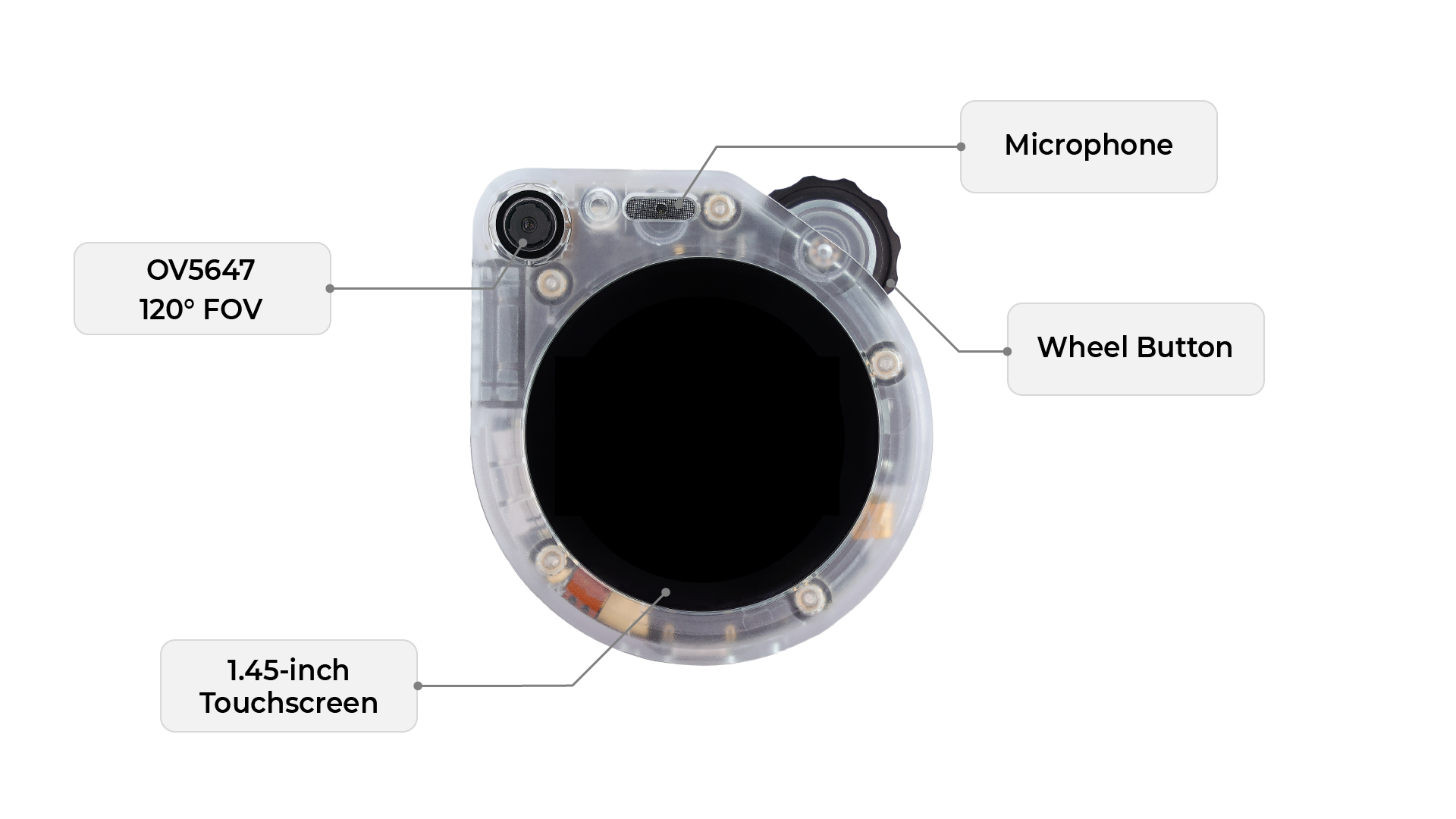
| 摄像头 | OV5647 120° FOV 固定焦距3米 |
| Wi-Fi | 符合IEEE 802.11b/g/n标准 2.4GHz频段 无线范围:最远100米(开放空间测试) |
| 蓝牙LE | 蓝牙5 |
| 天线 | 内置Wi-Fi和BLE天线 |
| 显示屏 | 1.45英寸触摸屏,412×412分辨率 |
| 麦克风 | 单麦克风 |
| 扬声器 | 1W扬声器输出 |
| 滚轮 | 支持上下滚动和按钮功能 |
| LED | 1个RGB指示灯 |
| microSD卡槽 | 支持最大32GB FAT32 microSD卡 |
| 闪存 | ESP32-S3的32MB闪存 Himax HX6538的16MB闪存 |
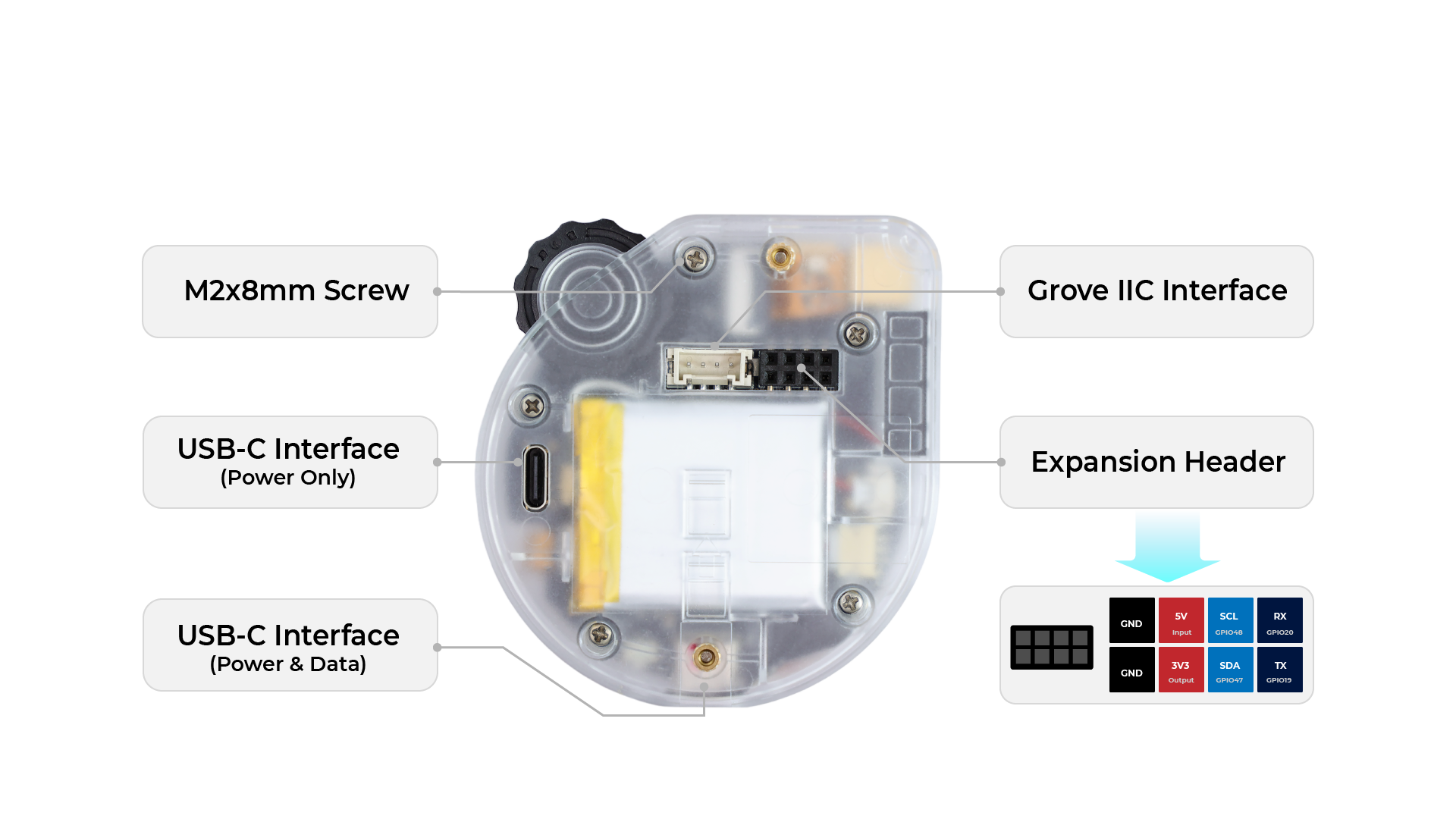
| 扩展接口 | 1个Grove IIC接口 2x4母头排针(1个IIC,2个GPIO,2个GND,1个3.3V_OUT,1个5V_IN) |
| USB-C | 背面1个USB-C(仅供电) 底部1个USB-C(供电和编程) |
| 复位按钮 | 底部孔内1个RST按钮 |
| 电源供应 | 5V直流电源 |
| 电池 | 3.7V 400mAh锂离子电池作为备用电源 |
| 工作温度 | 0 ~ 45°C |
| 安装支架 | 支持壁挂、桌面和支架安装 1个万向轮和带胶粘剂的底板 1套1/4"母头适配器 |
特性
- 高效架构,结合设备端 + 服务器端 AI 处理
- 无限模态扩展
- 开源和本地部署确保隐私保护
- 可定制的情感响应
正面视图
背面视图
内部结构
安装接口
在您的 Watcher 设备背面,您会发现一个安装支架,可以将设备安全地固定到各种表面或配件上。目前,我们提供两种类型的安装支架,以满足不同的放置需求:
请注意,Watcher 主体仅配备 360° 旋转支架。如果您需要 1/4 螺纹三脚架支架,请单独购买。
360° 旋转支架
- 此支架专为在墙壁或其他垂直表面上轻松安装而设计。
- 它提供完整的 360 度旋转,让您可以调整 Watcher 设备的方向以获得所需的观看角度。
- 旋转支架在定位方面提供灵活性,并确保牢固地固定在墙上。
1/4 螺纹三脚架支架
- 此支架非常适合将您的 Watcher 放置在平坦表面上,如桌子、台面或架子。
- 它采用标准 1/4 英寸螺纹,与大多数三脚架和其他安装配件兼容。
- 三脚架支架提供稳定性,让您可以根据具体需求将 Watcher 定位在各种高度和角度。
要使用这些安装支架中的任何一种,请按照以下一般步骤操作:
-
根据您的预期放置位置(墙壁或平坦表面)选择合适的支架。
-
将选定的支架连接到 Watcher 设备背面的安装支架上。确保连接牢固,防止意外脱落。
-
对于 360° 旋转支架:
- 确定墙上要安装 Watcher 的理想位置。
- 使用提供的螺丝和锚栓(如有必要)将支架牢固地固定在墙上。
- 通过将 Watcher 旋转到所需角度来调整其方向。
-
对于 1/4 螺纹三脚架支架:
- 选择一个稳定的平坦表面来放置您的 Watcher。
- 如果使用三脚架,请使用 1/4 英寸螺纹将三脚架连接到支架上。
- 调整三脚架的高度和角度,为您的 Watcher 获得最佳观看位置。
-
一旦您的 Watcher 使用任一支架牢固安装后,您就可以继续连接电源并根据您的偏好进行配置。
通过提供这两种安装支架选项,我们旨在为将您的 Watcher 设备集成到各种环境中提供灵活性和便利性。无论您偏好壁挂式设置还是桌面友好的布置,我们的支架都能确保安全且可调节的安装。
请注意,Watcher 主体不包含以下任何支架,因此如果您需要支架,请单独购买。
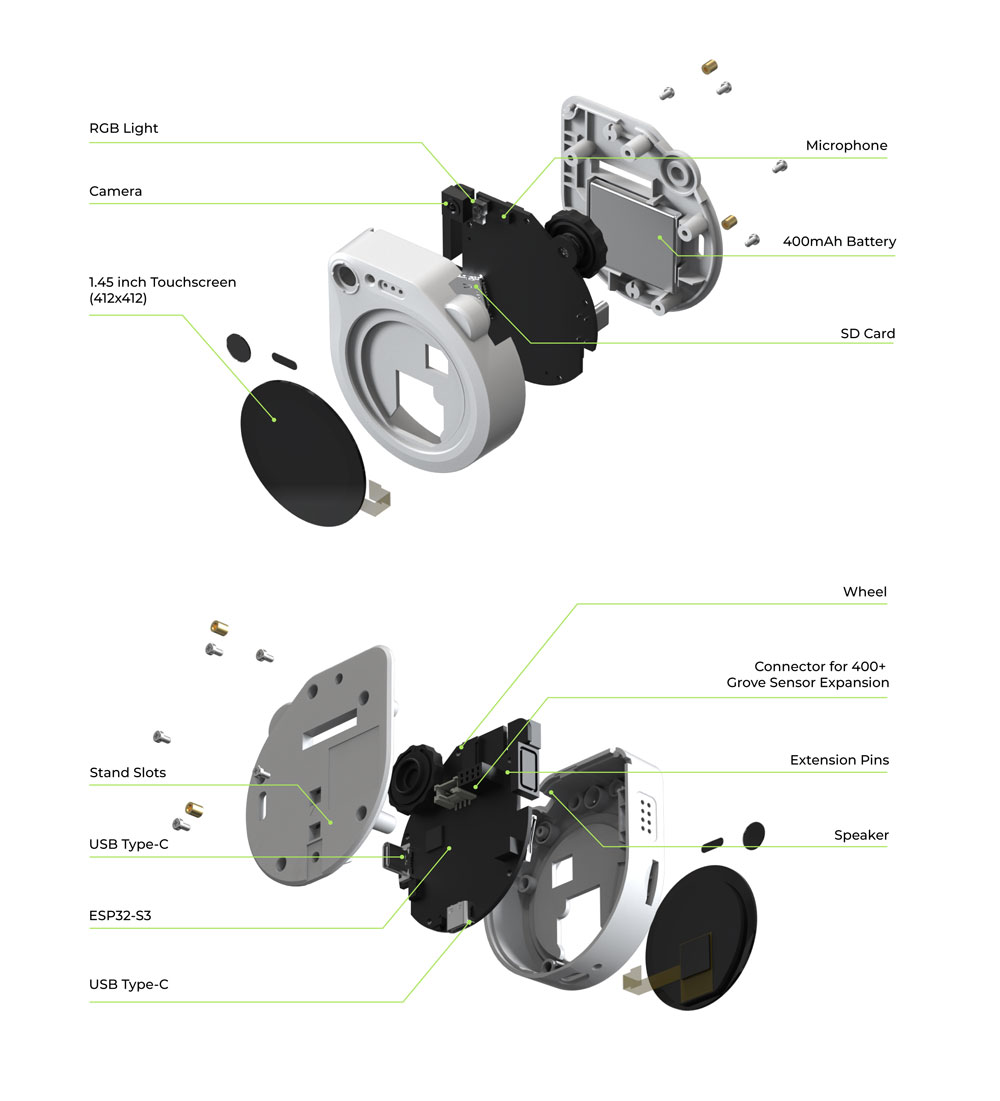
硬件图表
继续了解 Watcher 的硬件架构,让我们深入了解图表中提供的详细信息。
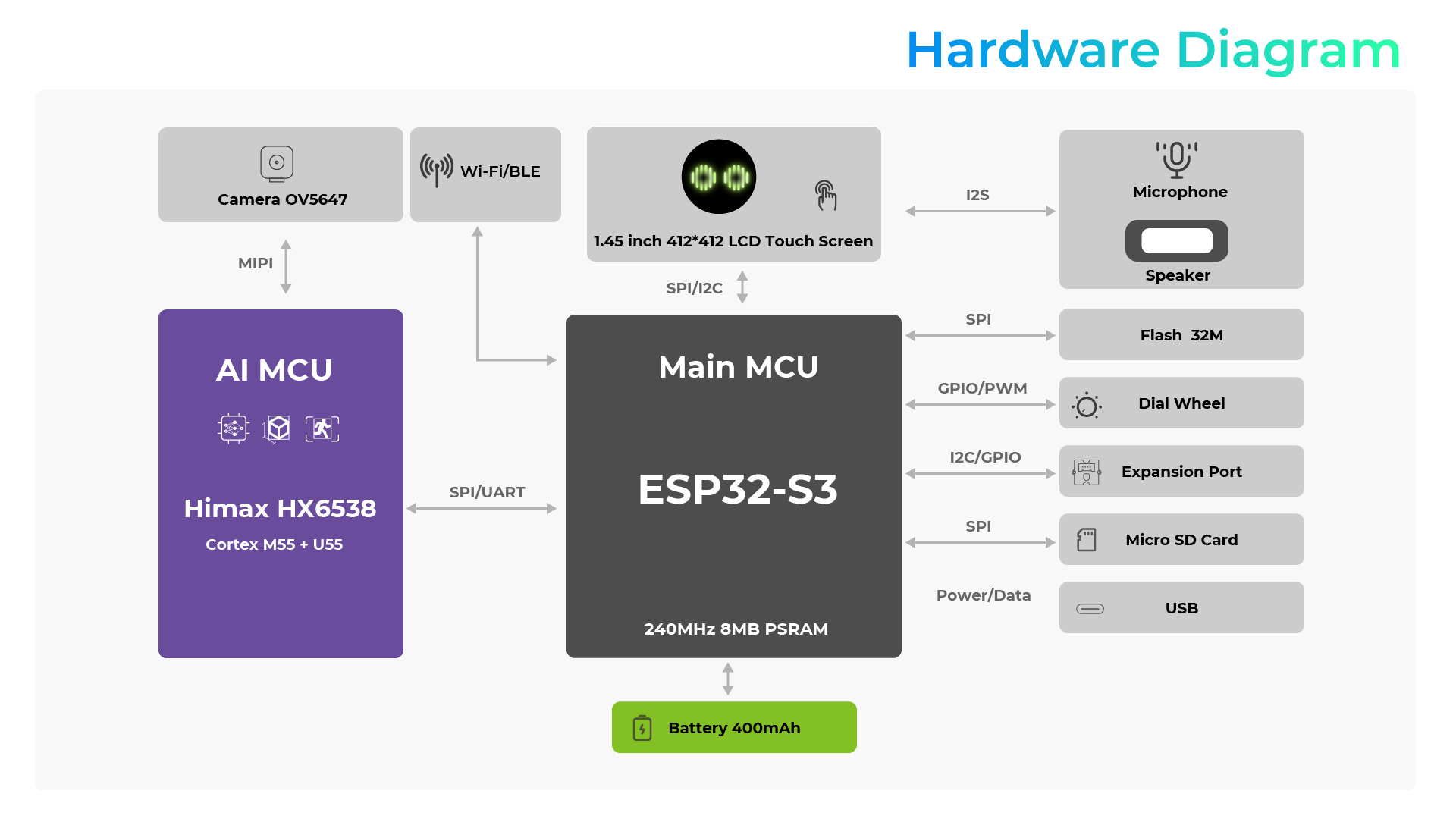
Watcher 的核心是主 MCU,它是一个 ESP32-S3 芯片。这个强大的微控制器运行在 240MHz,配备 8MB PSRAM,用于高效的处理和内存管理。
ESP32-S3 与各种外设和接口通信:
-
显示屏:它通过 SPI/I2C 接口连接到一个 1.45 英寸 412*412 LCD 触摸屏,实现直观的用户交互和生动的视觉输出。
-
音频:I2S 接口使 ESP32-S3 能够与扬声器和麦克风通信,提供音频输入和输出功能。
-
存储:Watcher 配备了一个 Flash 32M 模块,通过 SPI 接口连接,为固件、数据和用户文件提供充足的存储空间。
-
无线连接:ESP32-S3 集成了 Wi-Fi 和 BLE 功能,实现与其他设备和网络的无缝无线通信。
-
可扩展性:通过 I2C 接口连接的扩展端口,允许未来的硬件添加和定制。
-
用户输入:通过 GPIO/PWM 连接的拨盘,为用户提供直观的方式来导航和控制 Watcher 的功能。
-
外部存储:通过 SPI 接口的 Micro SD 卡插槽,使用户能够扩展 Watcher 的存储容量,用于额外的数据和媒体文件。
-
电源和数据:USB 端口可用于为 400mAh 电池充电,并在 Watcher 和其他设备之间传输数据。
AI MCU,一个配备 Cortex M55 和 US5 内核的 Himax HX6538 芯片,与主 MCU 协同工作,处理 AI 相关的任务和计算,增强 Watcher 的智能功能。
最后,Watcher 配备了一个 Camera OV5647 模块,可能通过 MIPI 接口连接,实现计算机视觉应用和视觉感知。
这种全面的硬件架构使 Watcher 能够提供功能丰富且多样化的用户体验,在紧凑高效的设计中结合了显示、音频、无线连接、存储和 AI 功能。
为 Watcher 充电
Watcher 上总共有两个 USB-C 端口,允许用户为不同的 Watcher 放置位置找到最合适的电源。
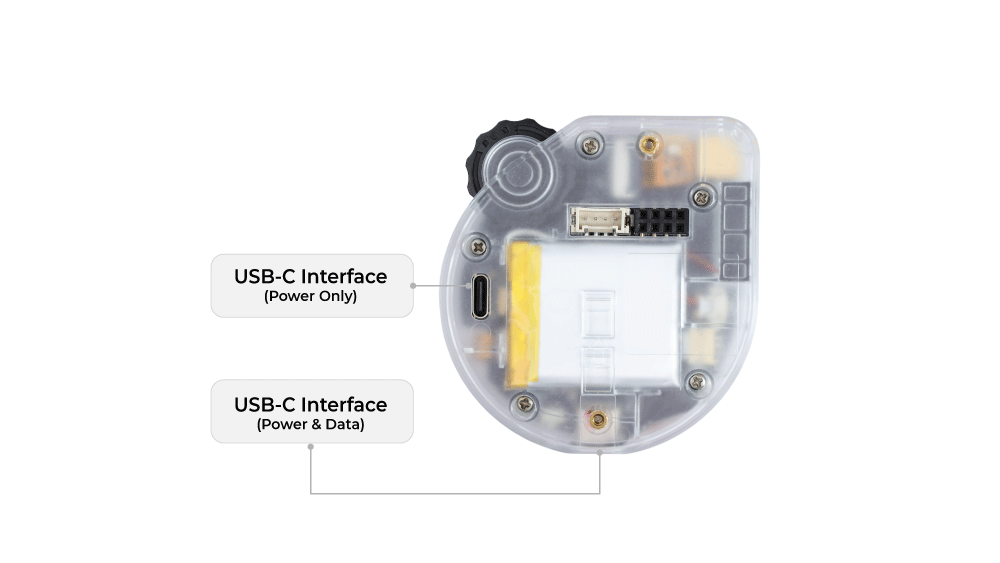
为 Watcher 充电时,请确保使用正规制造商的电源适配器,我们建议使用 5V/1A 电源规格为 Watcher 供电。如果您想与 Watcher 通信,您可能需要使用带有信号线的合规 USB-C 线缆。
请使用与 Watcher 兼容的电源插头;Watcher 必须使用 5V 电源供电,如果您使用不合规的电源适配器或电压大于 5V 的电源,可能会烧坏设备!
上图显示了推荐的适配器规格。如果您不知道在哪里可以购买合适的适配器,您可以选择通过下面的链接直接购买。
连接到串口控制台
当您通过 USB 连接 Watcher 时,Windows 会注册两个新的串口。在我的情况下是 COM23 和 COM24。我决定做一个实验,看看串口终端上会出现什么,因为我是 Circuitpython 的粉丝,我喜欢 REPL!为此我使用了 Putty 并将其配置为使用 115200 波特率的串口(我很幸运,第一个 COM23 端口就是我需要用来发现命令控制台的端口)。但另一个端口 COM24 用于使用 Xmodem 协议升级固件,方式与 Grove Vision AI V2 相同。
终端立即显示一系列关于设备内存的信息。如果您按回车键,会出现一个提示符,您可以输入一些命令,我在下面列出了这些命令:
help [<string>]
Print the summary of all registered commands if no arguments are given, otherwise print summary of given command, where <string> is the name of command
wifi_sta [-s <ssid>] [-p <password>]
WiFi is station mode, join specified soft-AP
s <ssid> SSID of AP
p <password> password of AP
ota [-t <int>] [--url=<string>] force ota, ignoring version check
-t, --ota_type=<int> 0: ai model, 1: himax, 2: esp32
-url=<string> url for ai model, himax or esp32 firmware
taskflow [-iej] [-f <string>]
i, --import import taskflow
e, --export export taskflow
f, --file=<string> File path, import or export taskflow json string by SD, eg: test.json
j, --json import taskflow json string by stdin
Example: Import taskflow by json string or SD file: taskflow -i -f "test.json".
Example: Export taskflow to stdout or SD file: taskflow -e -f "test.json"
factory_info
Get factory infomation
battery
Get battery percent
bsp subcmd [subcmd args]
Bsp call bsp functions
Example Scan the specified i2c bus: bsp i2cdetect <0|1>
reboot
Reboot the device
factory_reset
Factory reset and reboot the device
record [-t <int>] [-f <string>]
Record audio and save to SD.
-t, --time=<int> record time, s
-f, --file=<string> File path, Store PCM audio data in SD card
vi_ctrl [-sec] [-z <int>]
Voice interaction ctrl (Probably will be used with Push to Talk function)
-s, --start start wakeup, and start record
-e, --end end record
-c, --stop stop voice interaction when analyzing or palying, Put it into idle.
-z, --exit=<int> 0: exit vi, 1:exit vi then run new taskflow
iperf [-suVa] [-c <ip>] [-p <port>] [-l <length>] [-i <interval>] [-t <time>] [-b <bandwidth>]
Check conection performance. Similar to iperf linux command.
-c, --client=<ip> run in client mode, connecting to <host>
-s, --server run in server mode
-u, --udp use UDP rather than TCP
-V, --ipv6_domain use IPV6 address rather than IPV4
-p, --port=<port> server port to listen on/connect to
-l, --len=<length> Set read/write buffer size
-i, --interval=<interval> seconds between periodic bandwidth reports
-t, --time=<time> time in seconds to transmit for (default 10 secs)
-b, --bandwidth=<bandwidth> bandwidth to send at in Mbits/sec
-a, --abort abort running iperf
rgb [-r <int>] [-g <int>] [-b <int>] [-m <int>] [-v <int>] [-t <int>]
Set the rgb LED value. eg: rgb -r 255 -g 0 -b 0 -m 3
-r, --red=<int> red value, 0~255
-g, --green=<int> green value, 0~255
-b, --blue=<int> blue value, 0~255
-m, --mode=<int> 1: breath, 2: blink, 3:solid, default 3
-v, --step_value=<int> RGB step value, default 3
-t, --step_time_ms=<int> RGB step time(ms), default 5
技术支持与产品讨论
感谢您选择我们的产品!我们在这里为您提供不同的支持,确保您使用我们产品的体验尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。