XIAO ESP32C3 通过 ESPHome 服务访问 Home Assistant
本文将指导您在自己的 Home Assistant 环境中安装 ESPHome 服务。通过使用 XIAO ESP32C3 的 WiFi 功能,您将能够以非常流畅的方式将 XIAO 连接到 Home Assistant,作为家庭终端的一部分。
此外,我们将结合最受欢迎的 24GHz 毫米波人体静态存在模块 Lite,构建一个具有人体存在检测功能的 Home Assistant。
入门指南
截至 2023 年 7 月 31 日,之前会导致雷达完全失效的问题现已修复,因此请更新本教程系列的库文件和配置器以正常工作。
如果您想完整地学习本教程,您需要准备以下物品。
| XIAO ESP32C3 | 24GHz 毫米波人体静态 存在模块 Lite |
|---|---|
 |  |
这个项目的最终目标是在Home Assistant中部署24GHz毫米波人体静态存在模块Lite。
我们已经为24GHz毫米波人体静态存在模块Lite编写了完整的配置文件和库,以便您在此项目中快速将传感器部署到Home Assistant。
本教程的内容将大致涵盖以下步骤。
- 选择您的Home Assistant环境
- 在Home Assistant中安装和配置ESPHome
- 配置XIAO ESP32C3和ESPHome连接
- 配置Home Assistant面板
当然,如果您对XIAO ESP32C3如何在Home Assistant中使用Grove感兴趣,您可以直接阅读这一章节。
选择您的Home Assistant环境
在本例程中,我们不会详细介绍如何安装Home Assistant环境,我们假设您已经有一个正常工作的Home Assistant设备。
如果您希望学习如何安装Home Assistant,那么您可以参考官方教程。我们强烈建议您使用x86设备安装Home Assistant,因为这是安装带有Supervised的Home Assistant最用户友好的方式。
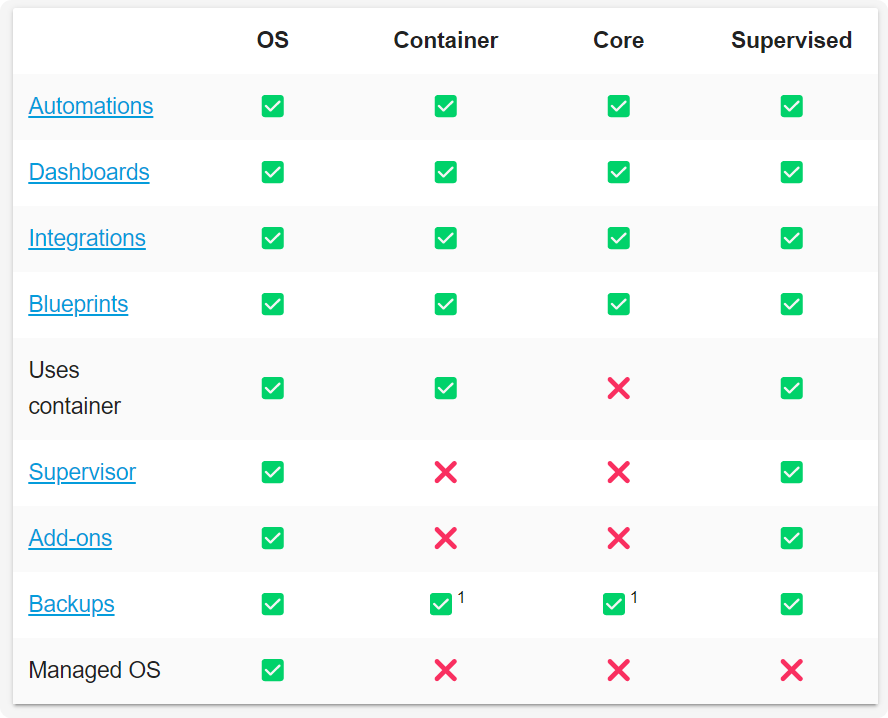
根据上表,安装Home Assistant OS和Home Assistant Supervised是最合适的,这将为您省去很多麻烦。如果您在OpenWRT的Docker上运行Home Assistant(例如使用LinkStar H68K),请不要担心,我们也会为您提供如何操作的详细参考。
我们还为Seeed Studio的一些产品编写了如何安装Home Assistant的教程,请参考它们。
- 在ODYSSEY-X86上开始使用Home Assistant
- 在reTerminal上开始使用Home Assistant
- 在LinkStar H68K/reRouter CM4上开始使用Home Assistant
在Home Assistant中安装ESPHome
步骤1. 安装ESPHome
- 场景1:在Home Assistant OS下安装ESPHome(带有Add-on Store)
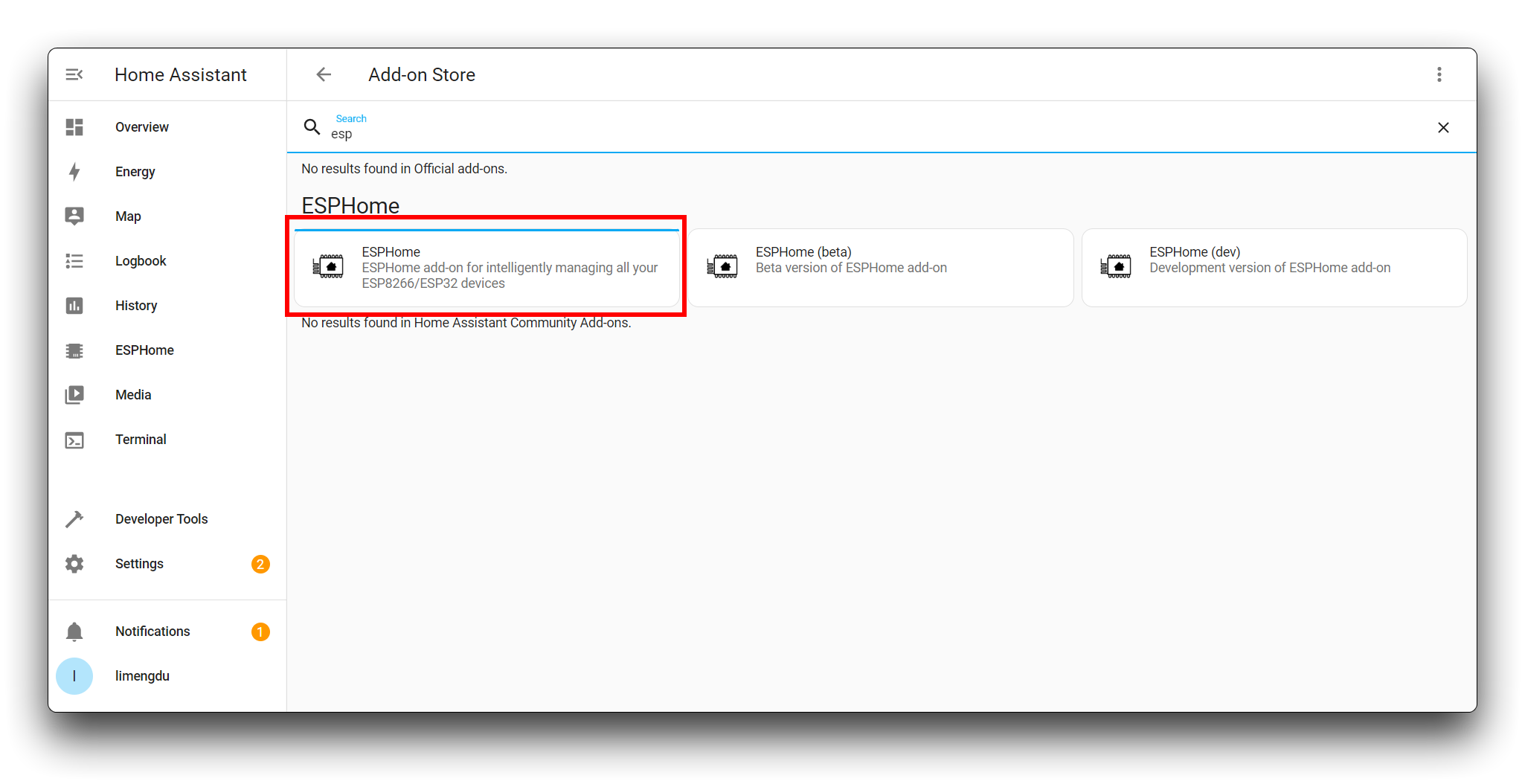
如果您安装了Home Assistant OS,它有一个Add-on Store,这使得安装ESPHome变得更加容易。
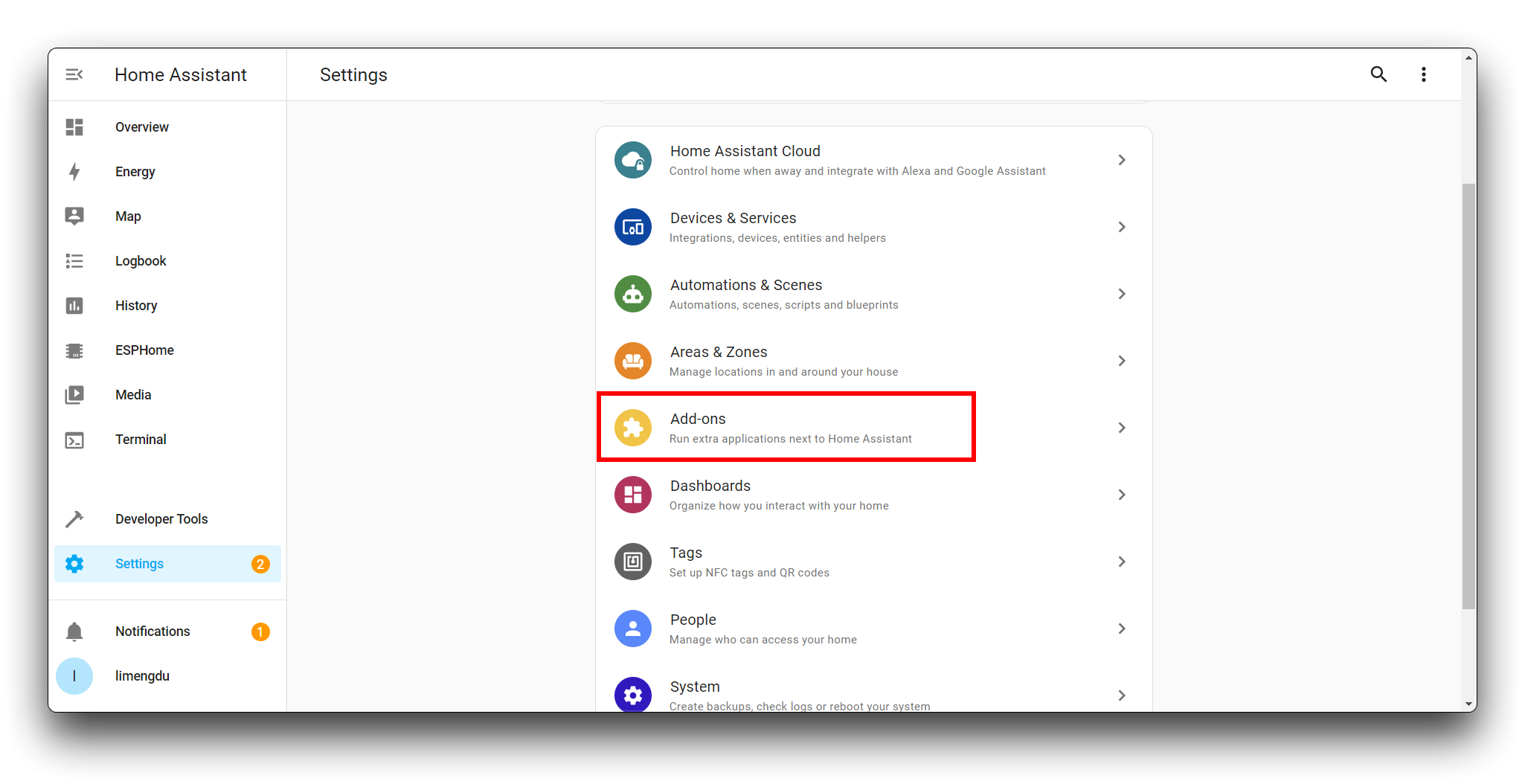
在Add-on Store中,您可以搜索并安装ESPHome。
- 场景2:在OpenWRT Docker/Docker下的Home Assistant中安装ESPHome(没有Add-on Store)
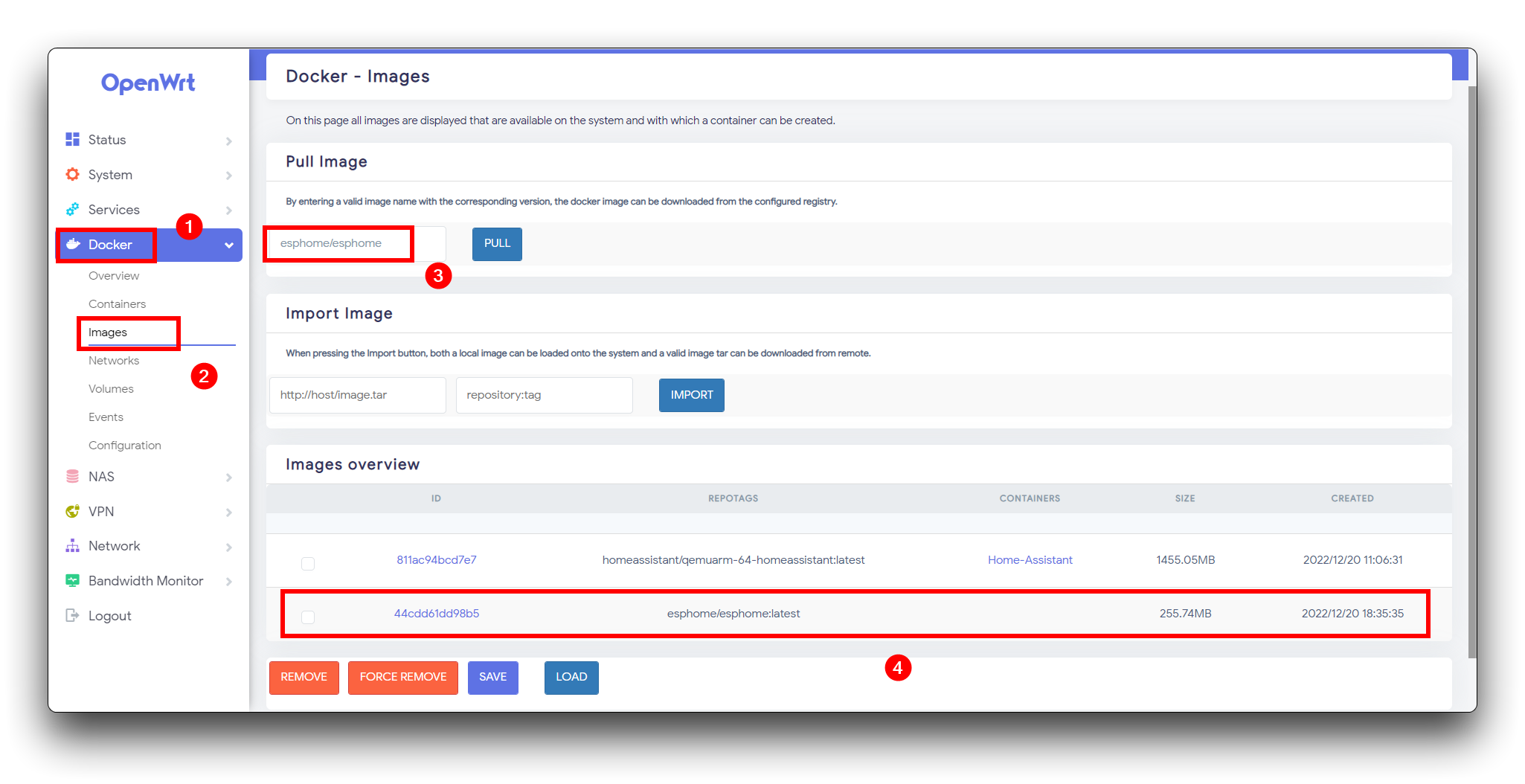
由于我们安装的是Home Assistant Container,我们无法简单地通过Add-on Store下载ESPHome服务,因此需要一个折中的方法。
我们需要下载ESPHome镜像。
esphome/esphome:latest
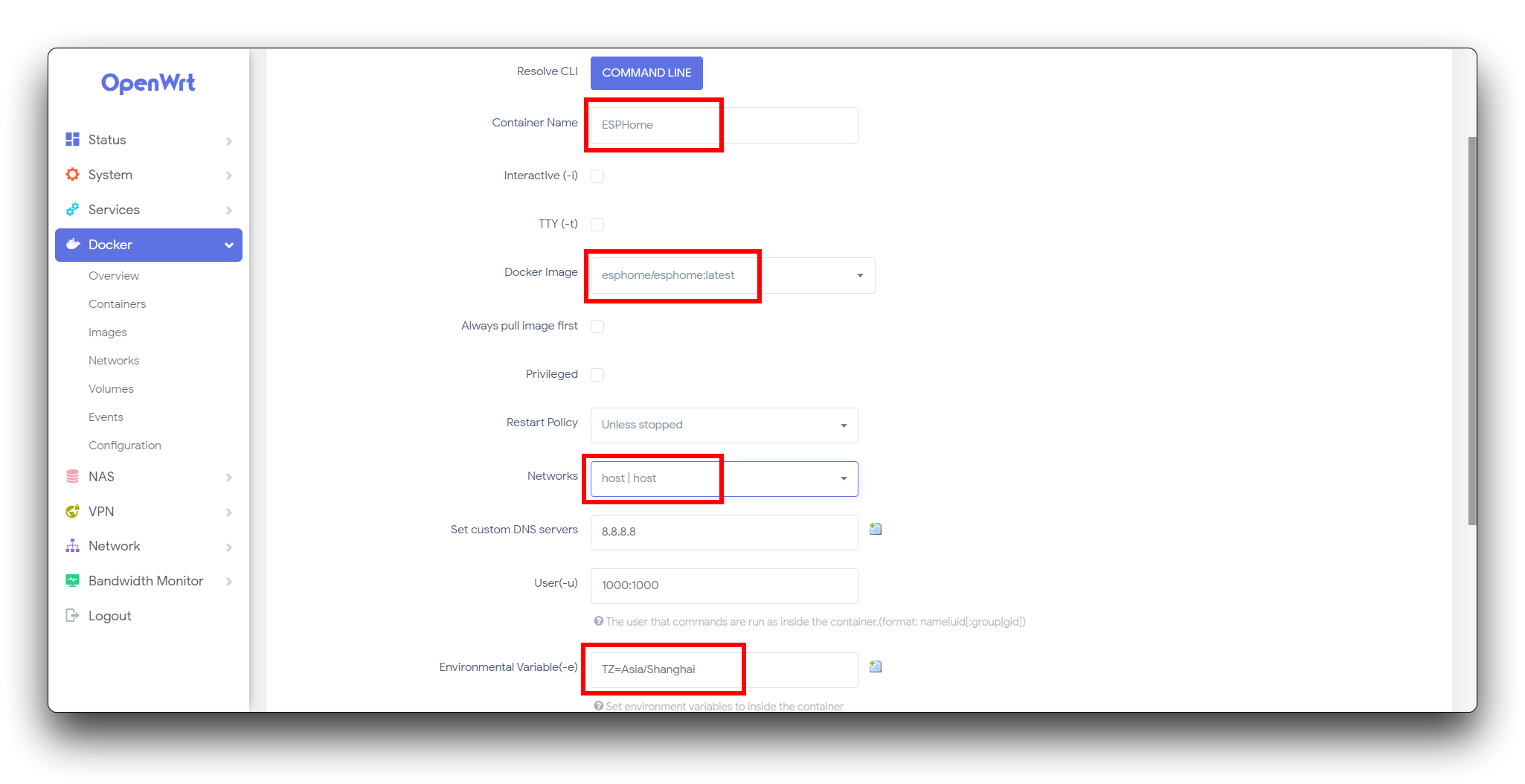
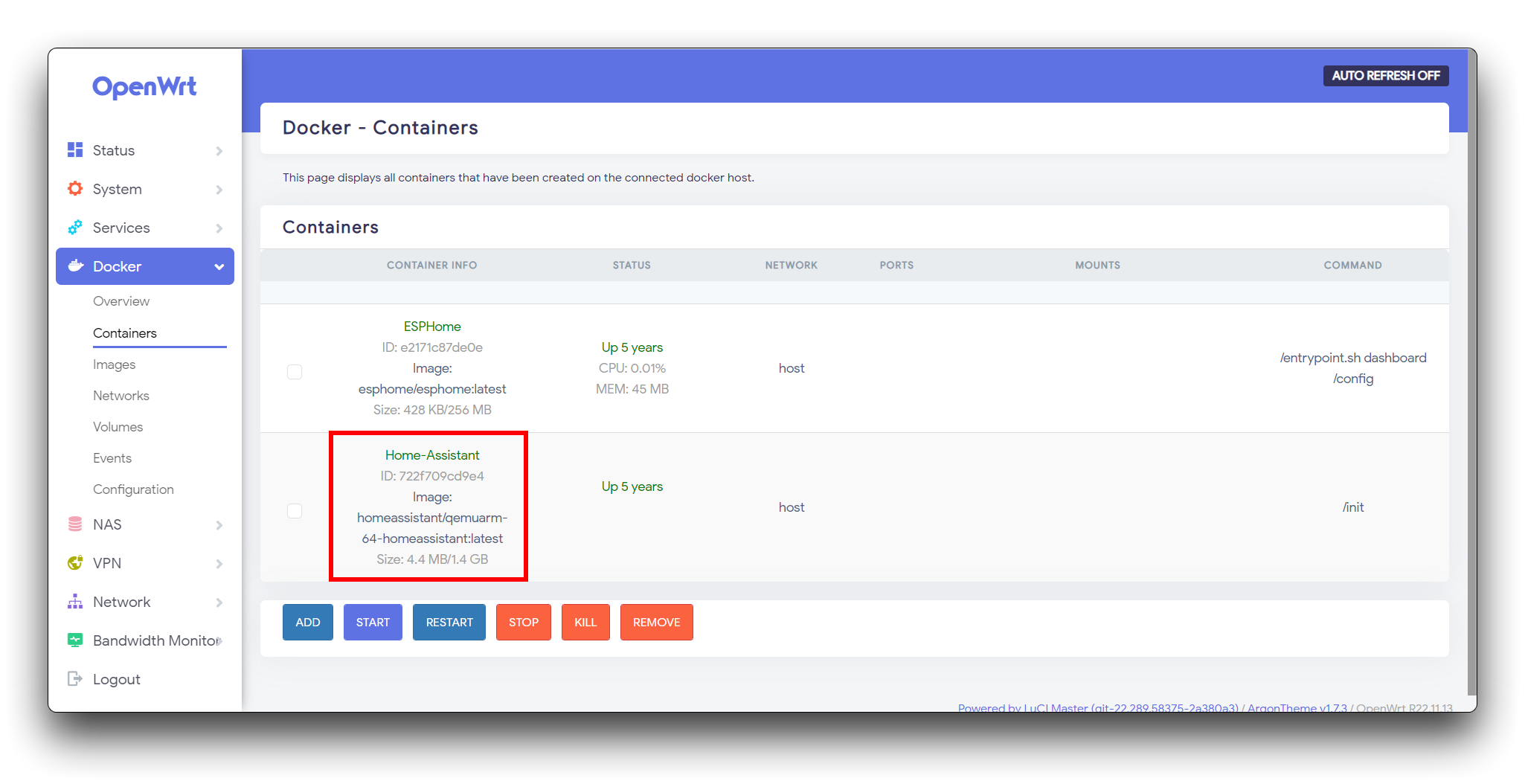
在创建容器的页面中,我们需要进行一些简单的设置。
- Container Name: 您的容器名称
- Docker Image: 选择刚刚下载的 esphome 镜像
- Network: 选择 host 模式
- Environment Variables(-e): 您的环境变量
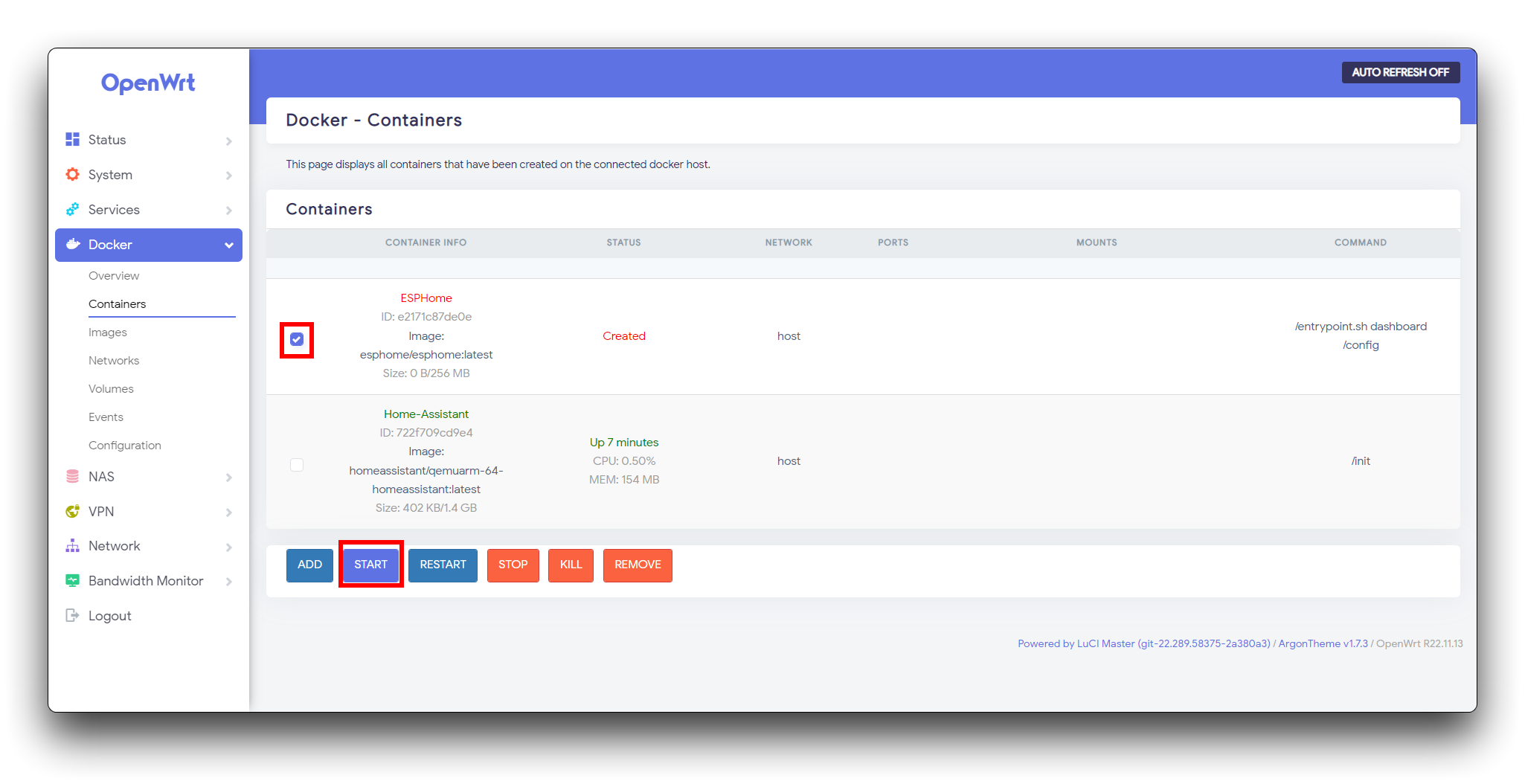
填写完上述内容后,保存并应用。您将看到容器已经创建完成。您还需要启动它。
为了实现与在 Home Assistant 中下载 ESPHome 相同的效果,我们需要修改 Home Assistant 下的配置文件。
进入 Home Assistant 容器。
我们进入 Home Assistant 中的终端。
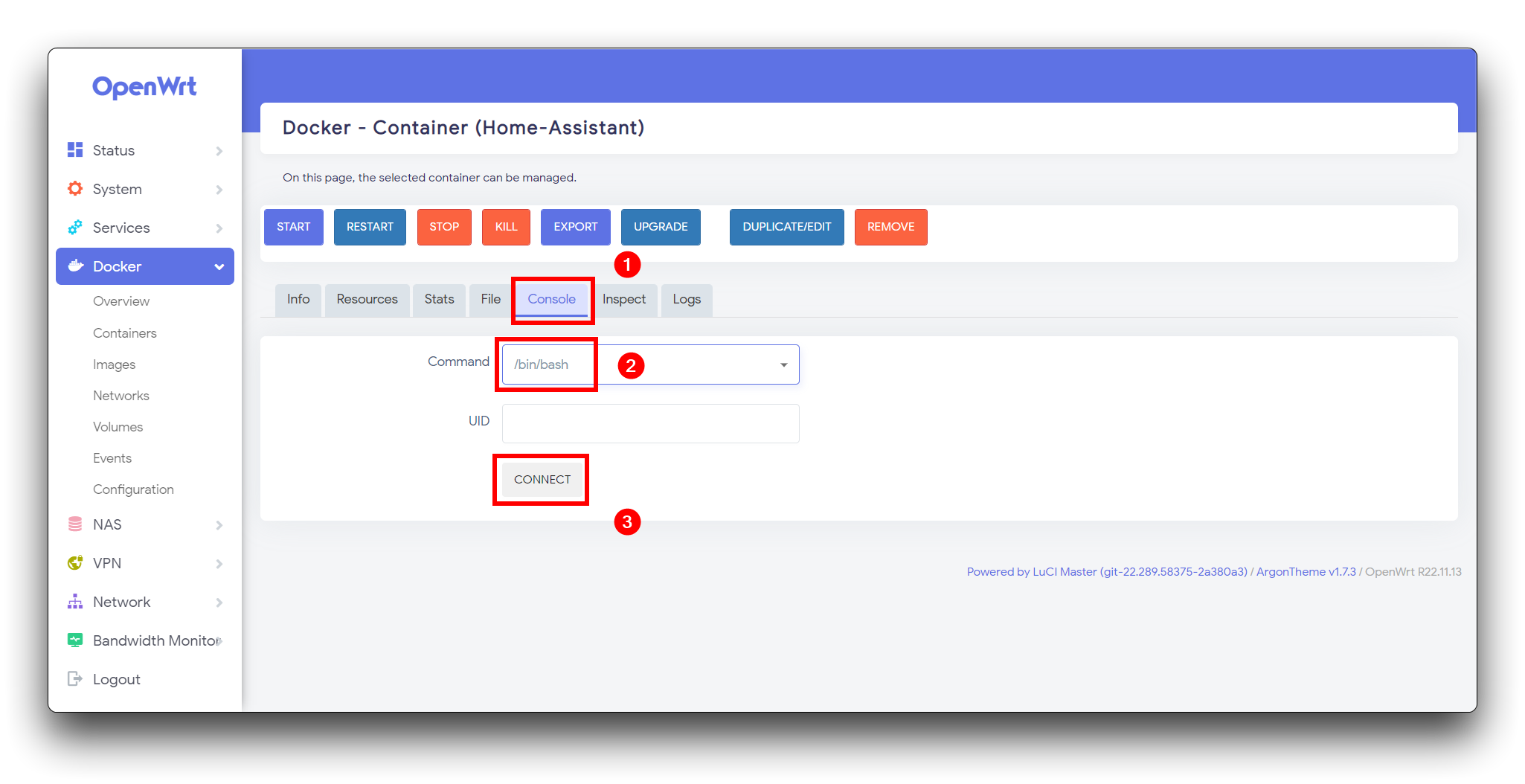
在终端中输入以下命令。
vi configuration.yaml
将以下内容添加到 configuration.yaml 的末尾。
# Example configuration.yaml entry
panel_iframe:
esphome:
title: "ESPHome"
url: "http://192.168.100.1:6052"
icon: mdi:chip
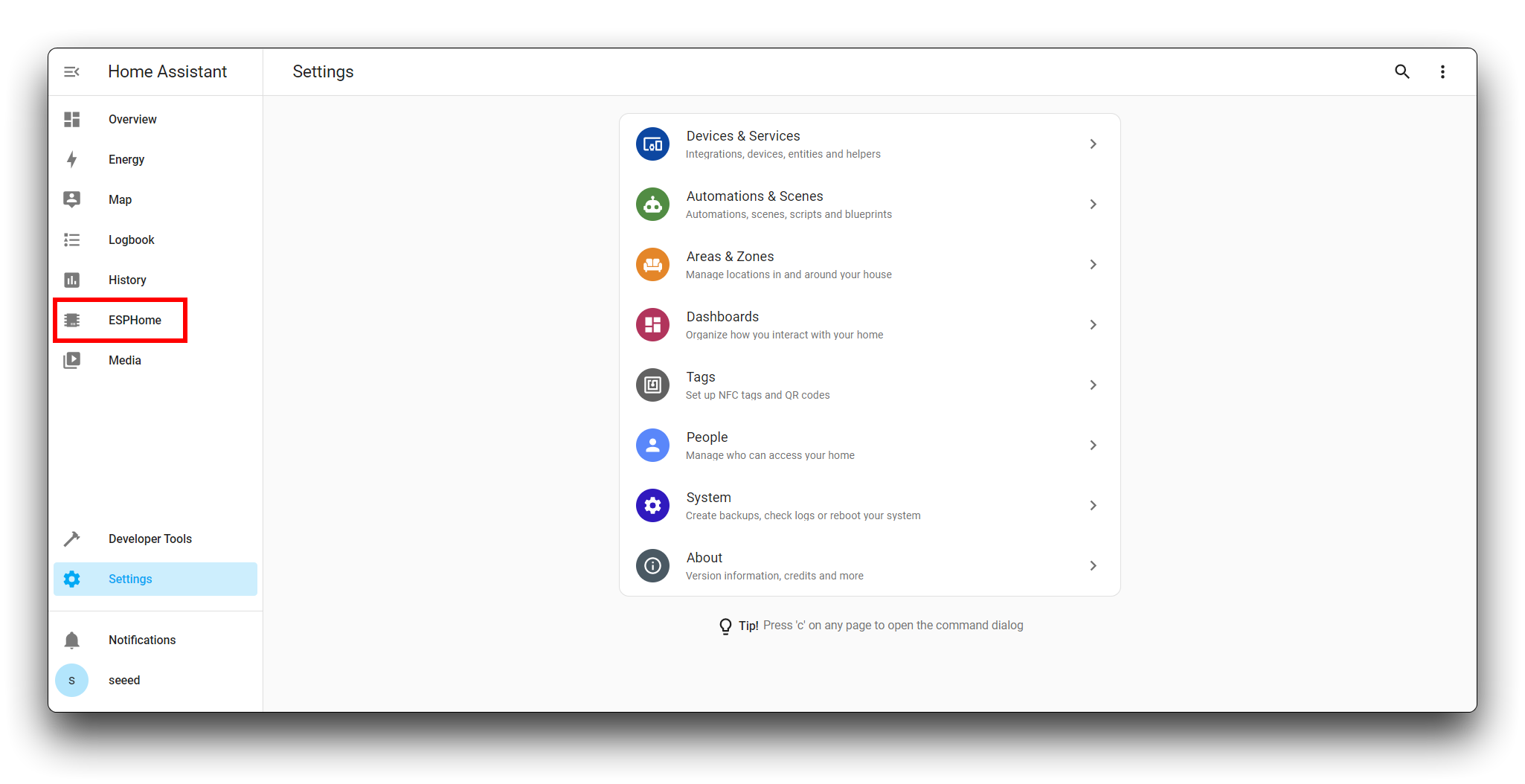
通过在 Home Assistant 容器 shell 中输入 exit 来退出 docker 容器。完成后,我们重启 Home Assistant 容器。
创建一个新的浏览器页面,输入地址 http://homeassistant:8123/ 并输入您的 Home Assistant 账户,您将看到 ESPHome 出现在左侧工具栏中。
配置 XIAO ESP32C3 和 ESPHome 连接
步骤 2. 硬件准备
我们教程的目标是能够在 Home Assistant 仪表板中看到 24GHz mmWave 人体静态存在模块 Lite 的数据信息。
通过主板将设备连接到计算机。接线图如下表所示。
 | ||
| XIAO ESP32C3 | 24GHz mmWave 人体静态 存在模块 Lite | |
| 5V | --> | 5V |
| GND | --> | GND |
| D2 | --> | RX |
| D3 | --> | TX |
步骤 3. 保持 XIAO ESP32C3 和 Home Assistant 在同一局域网内
我确信您的 Home Assistant 已经完成了接入网络的工作,例如通过网线连接到您的设备。然后您需要做的就是简单地开启一个本地网络(例如 WiFi),以便 XIAO ESP32C3 也能连接到这个网络。
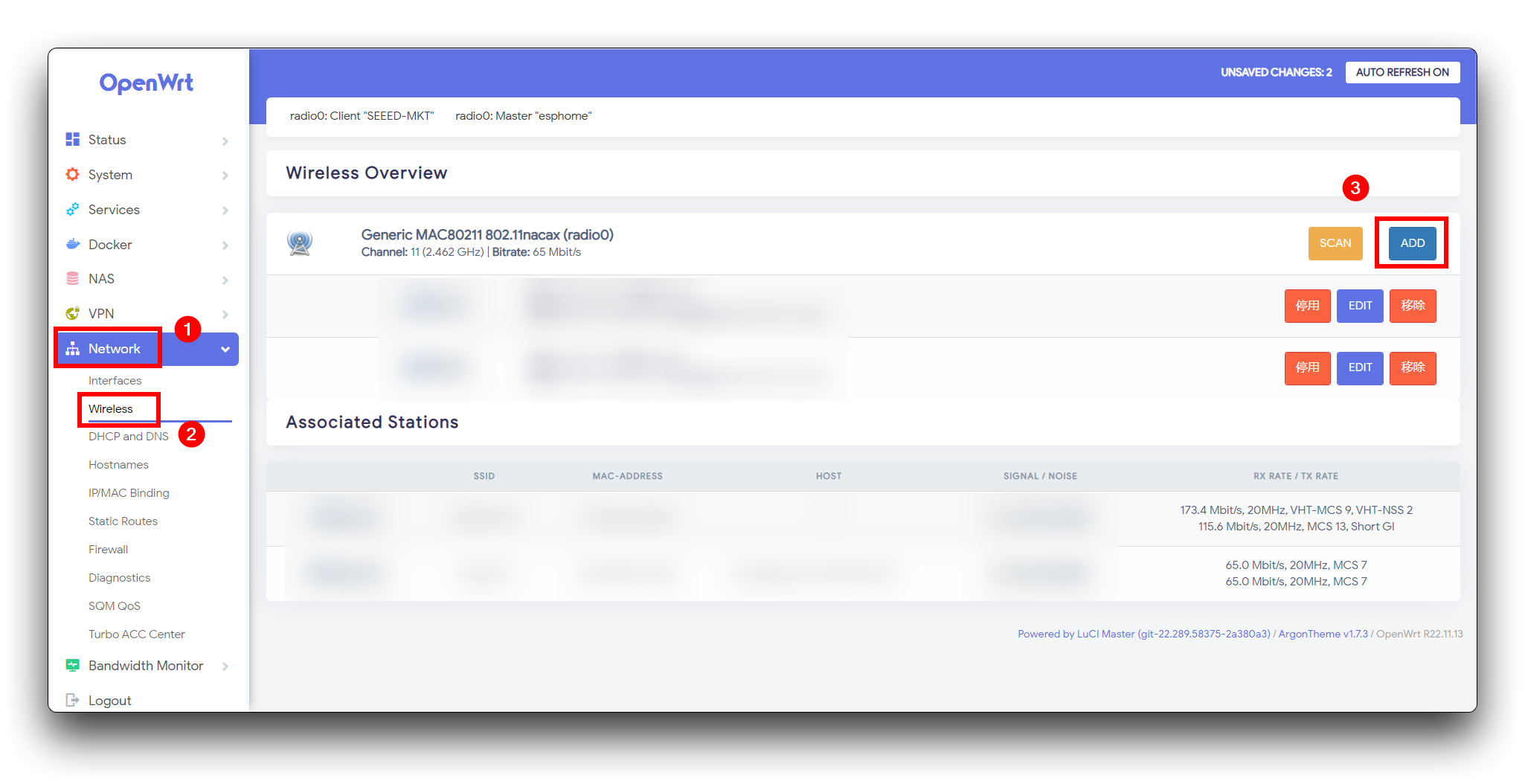
下面我将以 LinkStar H68K 为例。我的目标是让 XIAO 连接到 LinkStar H68K 的热点。
在 OpenWRT 的 Network 选项卡中,选择 Wireless --> ADD。
在 Device Configuration 中的 Transmit Power,选择 auto。
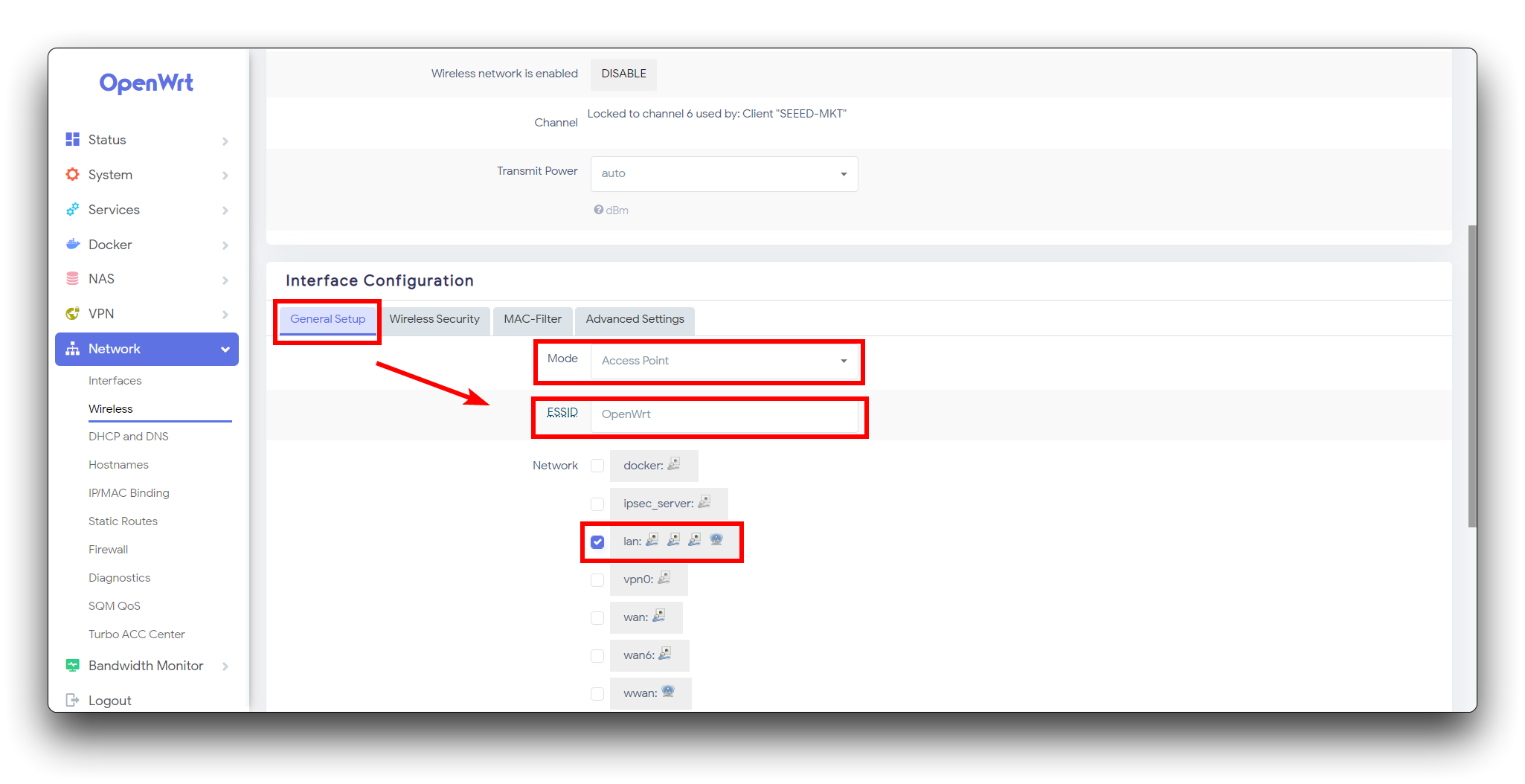
对于 Interface Configuration 设置,请按照以下说明填写。
- General Setup
- Mode:取决于 LinkStar 如何接入互联网。如果您使用有线连接,则选择 Client,如果您连接到 WiFi,则选择 Access Point。
- ESSID:输入您的 WiFi 名称,请尽量不要包含空格或特殊字符。
- Network:勾选 lan。
- Wireless Security
- Encryption:WPA2-PSK
- Key:输入您希望设置的 WiFi 密码。
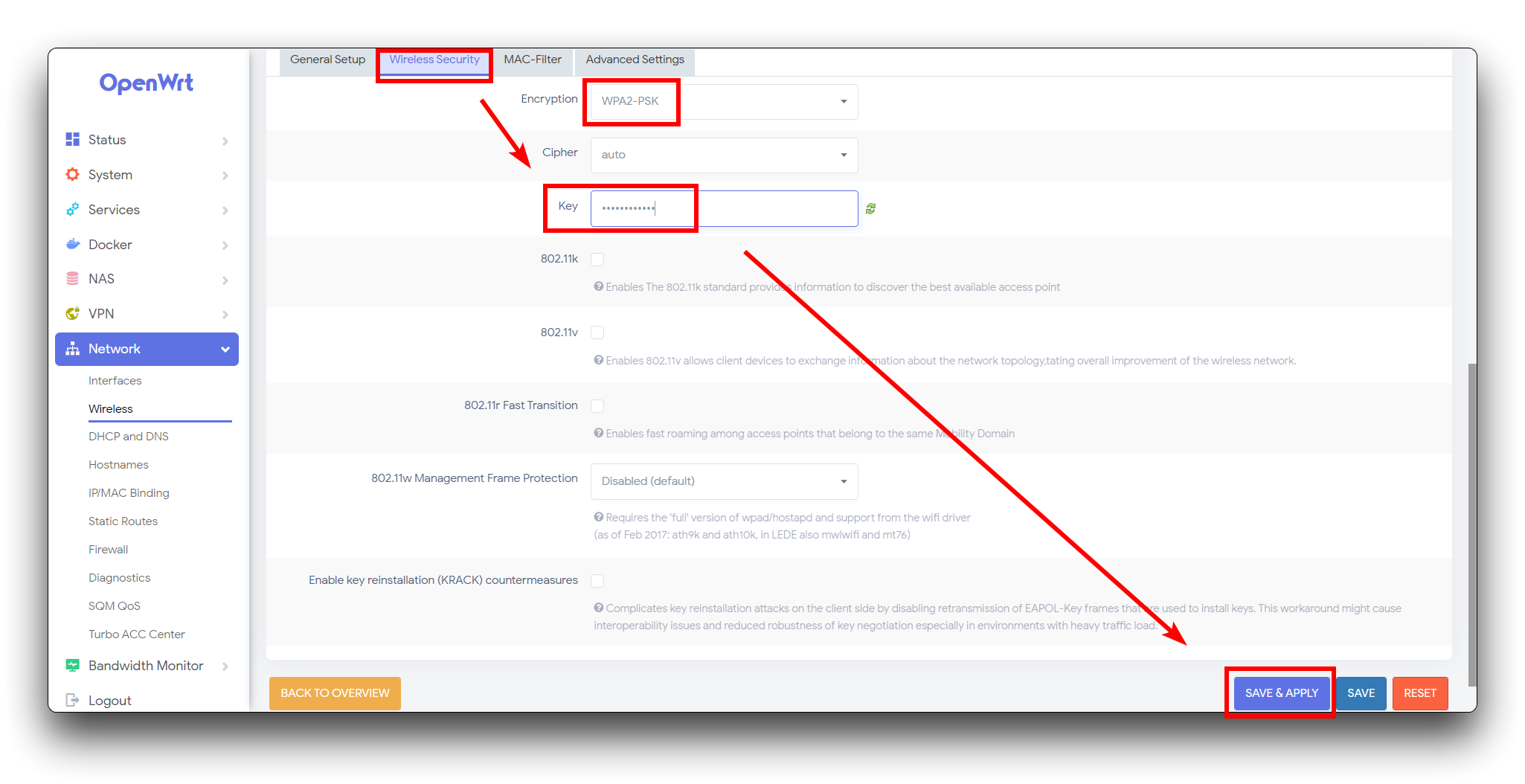
填写完上述信息后,点击右下角的 Save and Apply,等待片刻让 LinkStar 开启热点。
当没有设备连接到此热点时,它将显示为无信号。
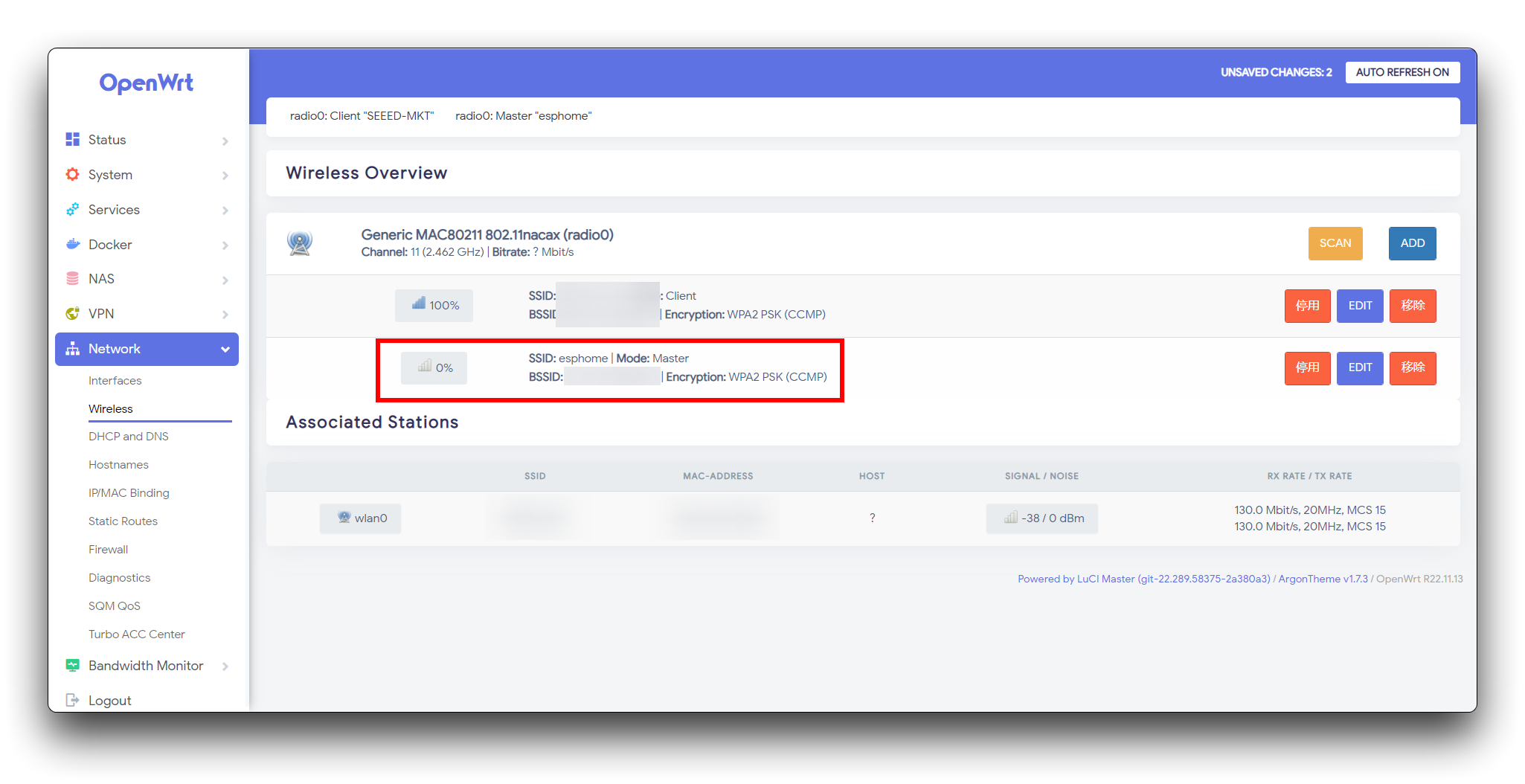
综合考虑,让我们回到 Home Assistant 页面。
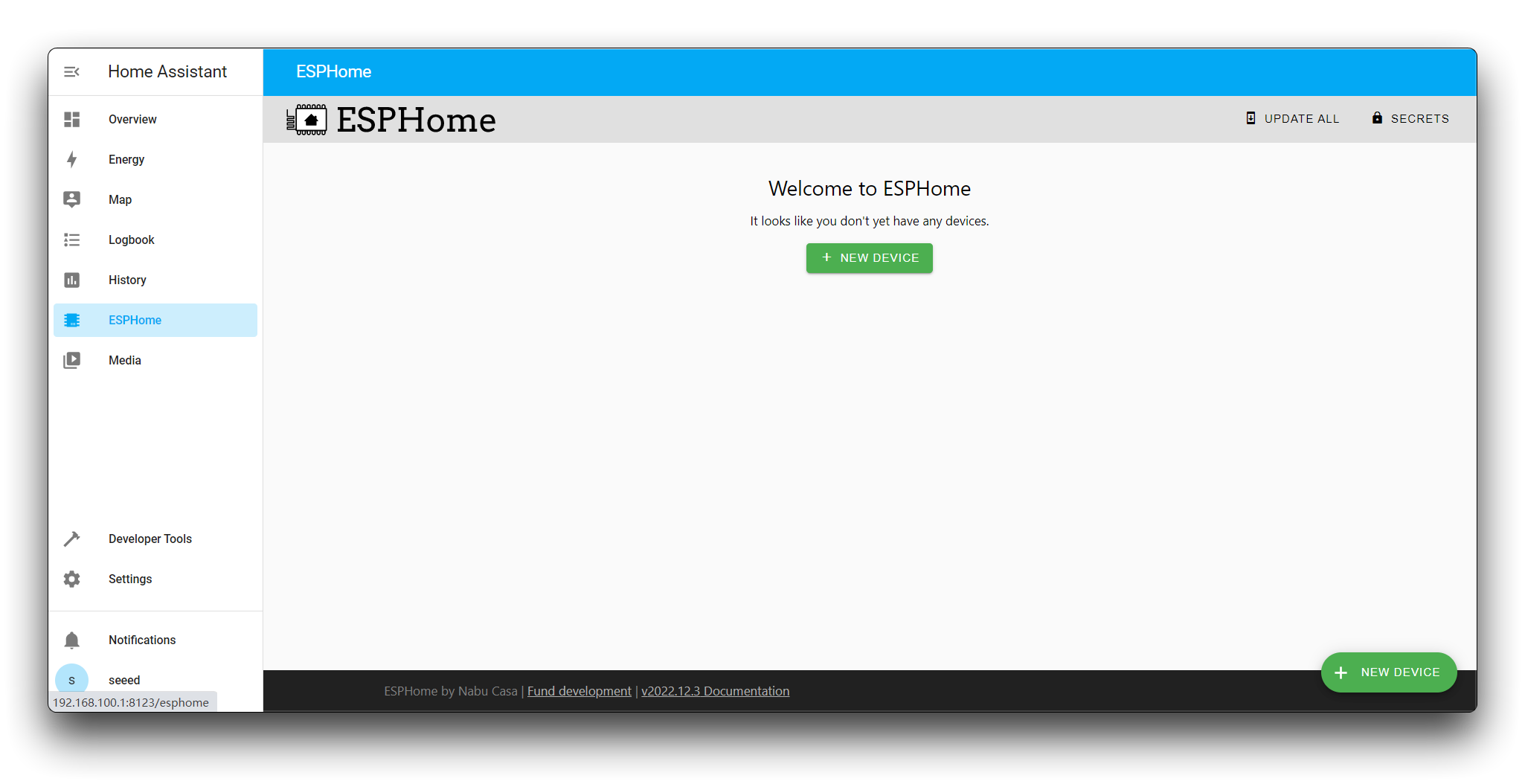
点击 NEW DEVICE。然后点击 Continue。
在新弹出的窗口中,请输入您希望设置的应用程序名称,以及您在 LinkStar 中设置的热点名称和密码(或您自己的 WiFi)。确保 XIAO ESP32C3 和 Home Assistant 在同一局域网内。
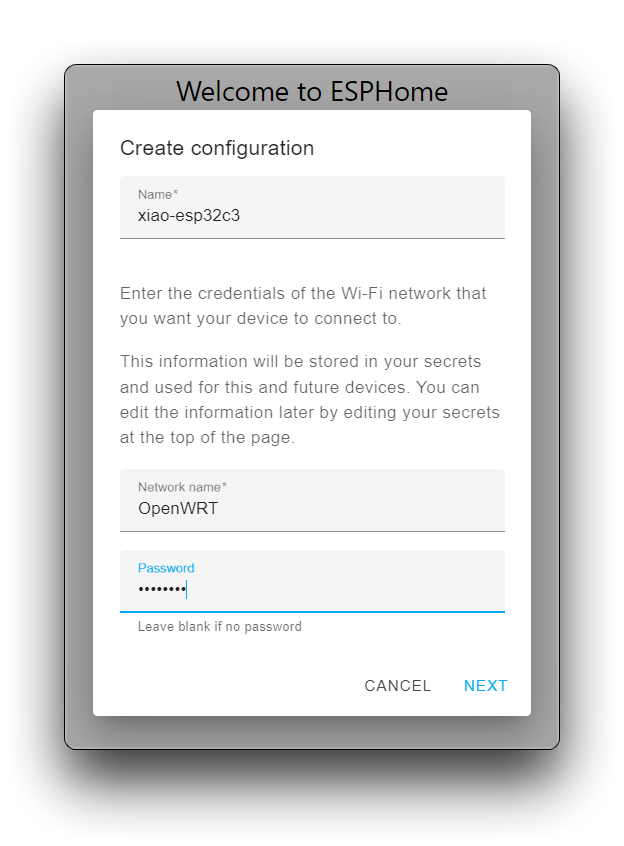
然后点击 Next。
在设备类型中,请选择 ESP32-C3。
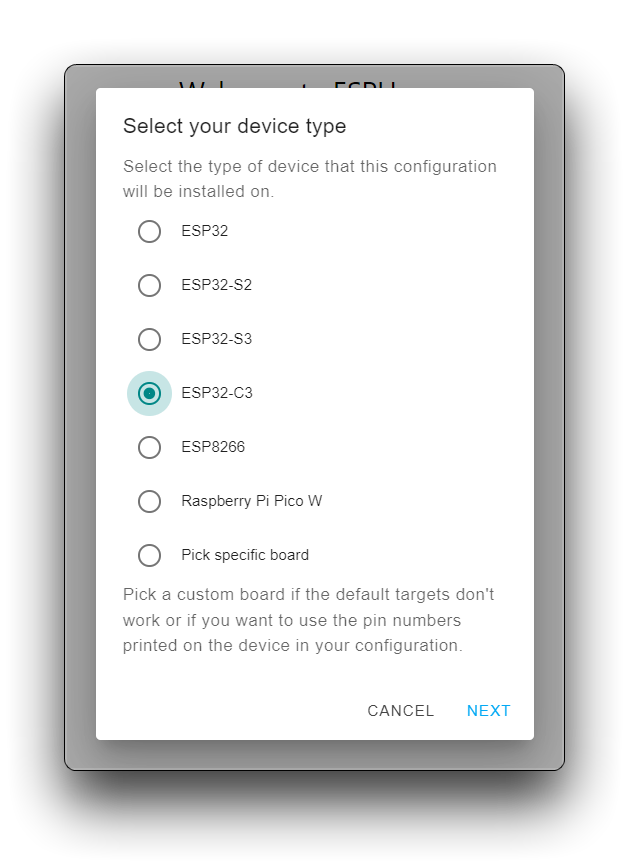
然后点击 Next。
点击 Encryption key 并将其保存在安全位置,我们将在后续步骤中使用此密钥。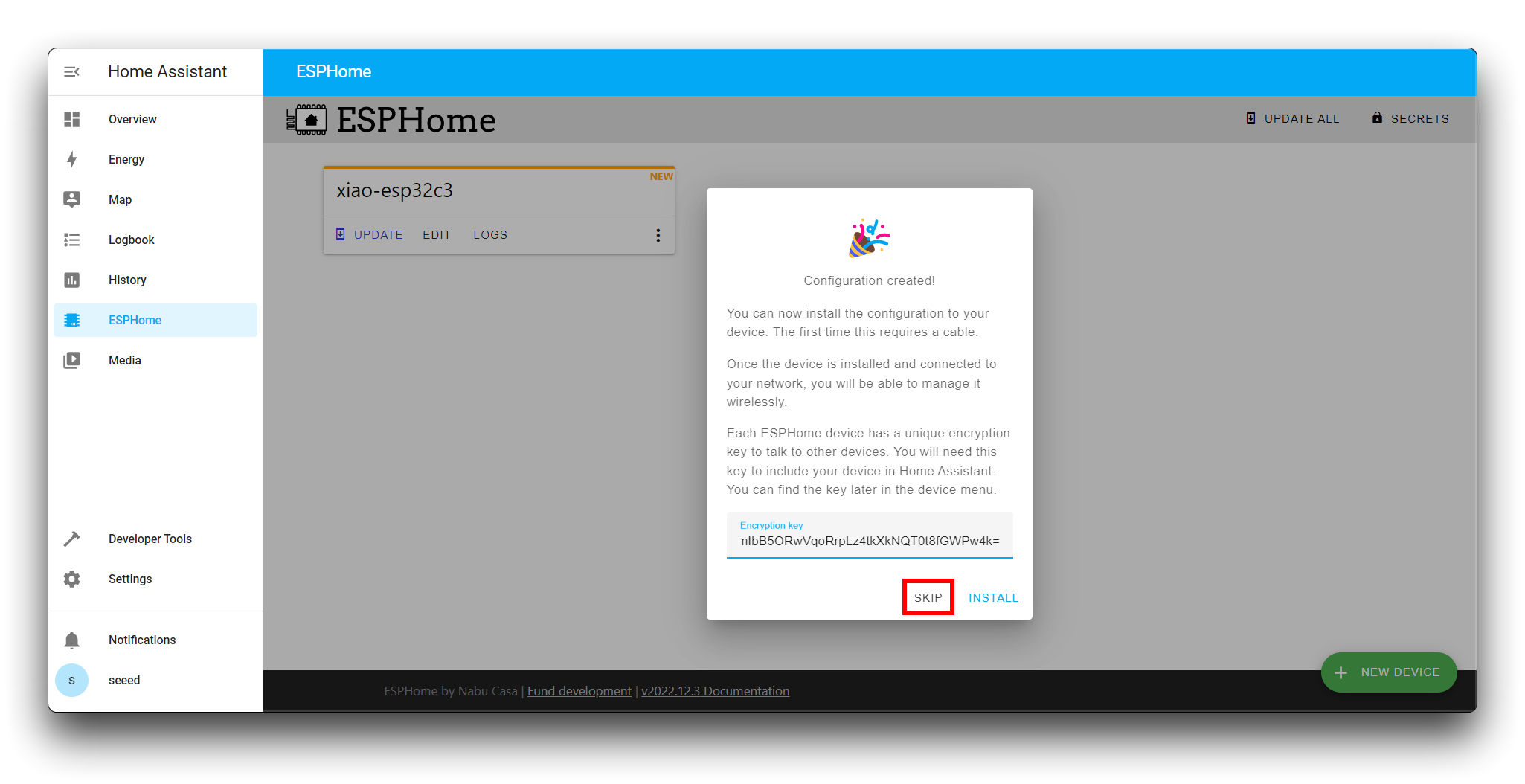
然后点击 SKIP。
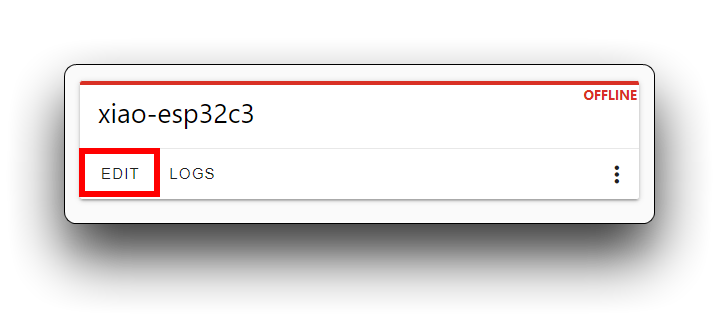
步骤 4. 更改 XIAO ESP32C3 配置 yaml 文件
然后,我们点击刚刚创建的设备选项卡,左下角有 EDIT 按钮。
请注意,我们需要对这个 yaml 文件进行更改。我们将要修改的内容分为两个主要部分,对应下图中的一和二。
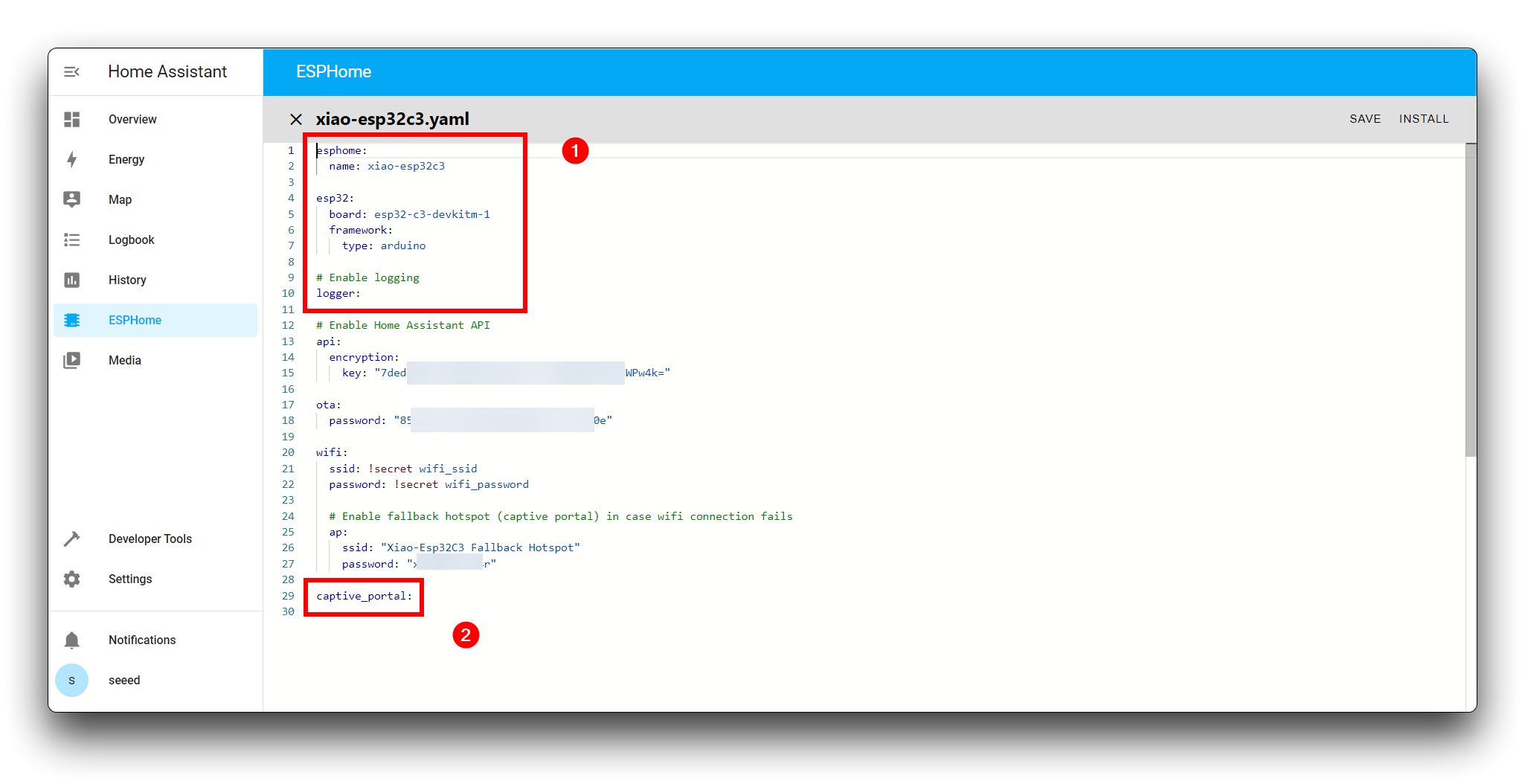
- 在内容的 ① 中,除了您已配置的设备名称外,请不要更改,其余内容请参考下面的代码。
# part 1:
substitutions:
name: "xiao-esp32c3"
friendly_name: "XIAO ESP32C3"
esphome:
name: "${name}"
friendly_name: "${friendly_name}"
name_add_mac_suffix: true
project:
name: "seeedstudio.mmwave_kit"
version: "2.0"
platformio_options:
board_build.flash_mode: dio
board_build.mcu: esp32c3
external_components:
- source: github://limengdu/mmwave-kit-external-components@main
refresh: 0s
esp32:
board: esp32-c3-devkitm-1
variant: esp32c3
framework:
type: esp-idf
# Enable logging
logger:
hardware_uart: USB_SERIAL_JTAG
level: DEBUG
- 在内容的 ② 中,在
captive_portal:后复制以下代码。
点击这里预览完整代码
# Sets up Bluetooth LE (Only on ESP32) to allow the user
# to provision wifi credentials to the device.
esp32_improv:
authorizer: none
# Sets up the improv via serial client for Wi-Fi provisioning.
# Handy if your device has a usb port for the user to add credentials when they first get it.
# improv_serial: # Commented until improv works with usb-jtag on idf
uart:
id: uart_bus
baud_rate: 115200
rx_pin: 4
tx_pin: 5
parity: NONE
stop_bits: 1
seeed_mr24hpc1:
id: my_seeed_mr24hpc1
text_sensor:
- platform: seeed_mr24hpc1
heart_beat:
name: "Heartbeat"
product_model:
name: "Product Model"
product_id:
name: "Product ID"
hardware_model:
name: "Hardware Model"
hardware_version:
name: "Hardware Version"
keep_away:
name: "Active Reporting Of Proximity"
motion_status:
name: "Motion Information"
custom_mode_end:
name: "Custom Mode Status"
binary_sensor:
- platform: seeed_mr24hpc1
has_target:
name: "Presence Information"
sensor:
- platform: seeed_mr24hpc1
custom_presence_of_detection:
name: "Static Distance"
movement_signs:
name: "Body Movement Parameter"
custom_motion_distance:
name: "Motion Distance"
custom_spatial_static_value:
name: "Existence Energy"
custom_spatial_motion_value:
name: "Motion Energy"
custom_motion_speed:
name: "Motion Speed"
custom_mode_num:
name: "Current Custom Mode"
switch:
- platform: seeed_mr24hpc1
underlying_open_function:
name: Underlying Open Function Info Output Switch
button:
- platform: seeed_mr24hpc1
restart:
name: "Module Restart"
custom_set_end:
name: "End Of Custom Mode Settings"
select:
- platform: seeed_mr24hpc1
scene_mode:
name: "Scene"
unman_time:
name: "Time For Entering No Person State (Standard Function)"
existence_boundary:
name: "Existence Boundary"
motion_boundary:
name: "Motion Boundary"
number:
- platform: seeed_mr24hpc1
sensitivity:
name: "Sensitivity"
custom_mode:
name: "Custom Mode"
existence_threshold:
name: "Existence Energy Threshold"
motion_threshold:
name: "Motion Energy Threshold"
motion_trigger:
name: "Motion Trigger Time"
motion_to_rest:
name: "Motion To Rest Time"
custom_unman_time:
name: "Time For Entering No Person State (Underlying Open Function)"
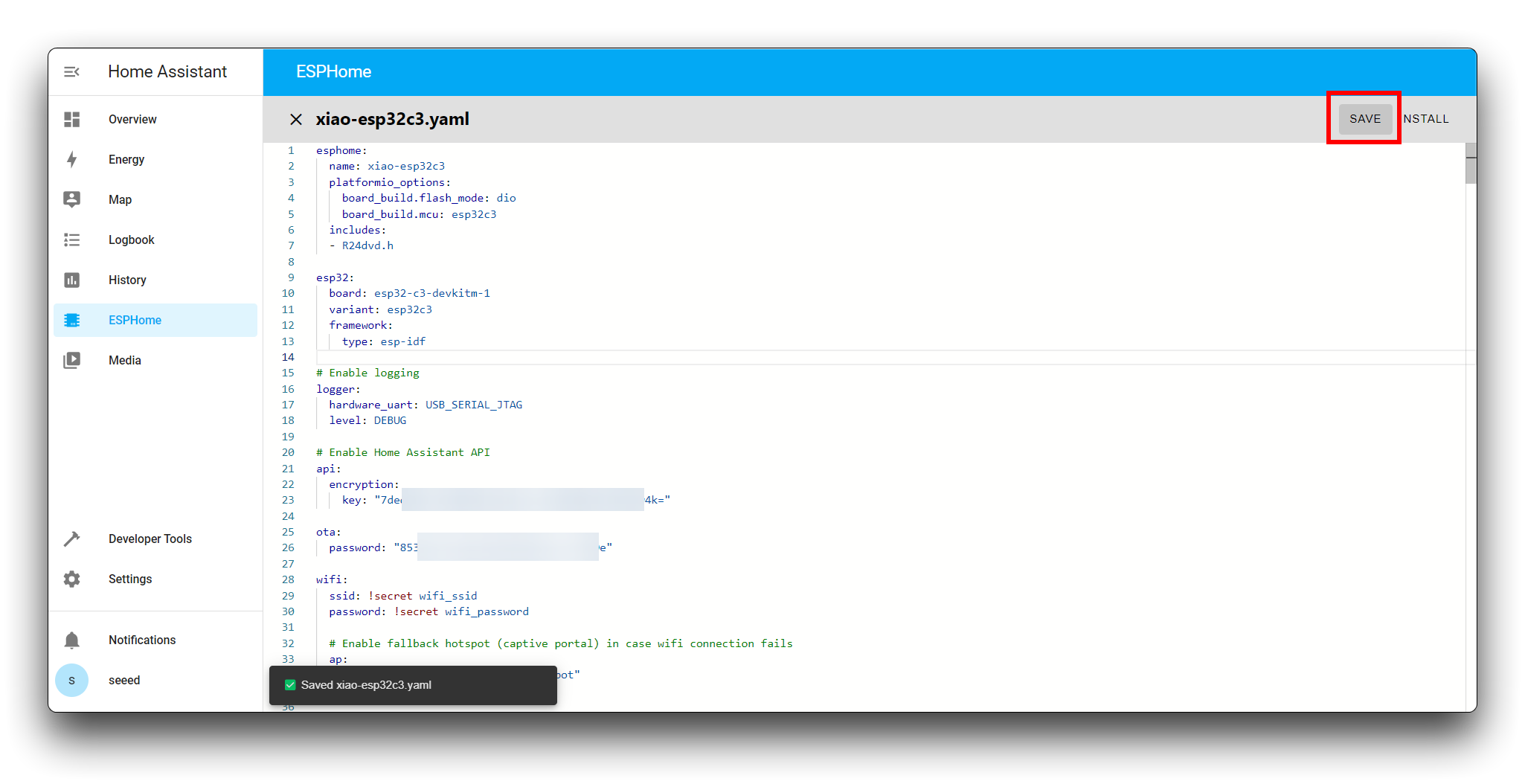
然后,请点击右上角的 保存 按钮。
步骤 5. 将固件上传到 XIAO ESP32C3
- 方法 1:直接编译并上传
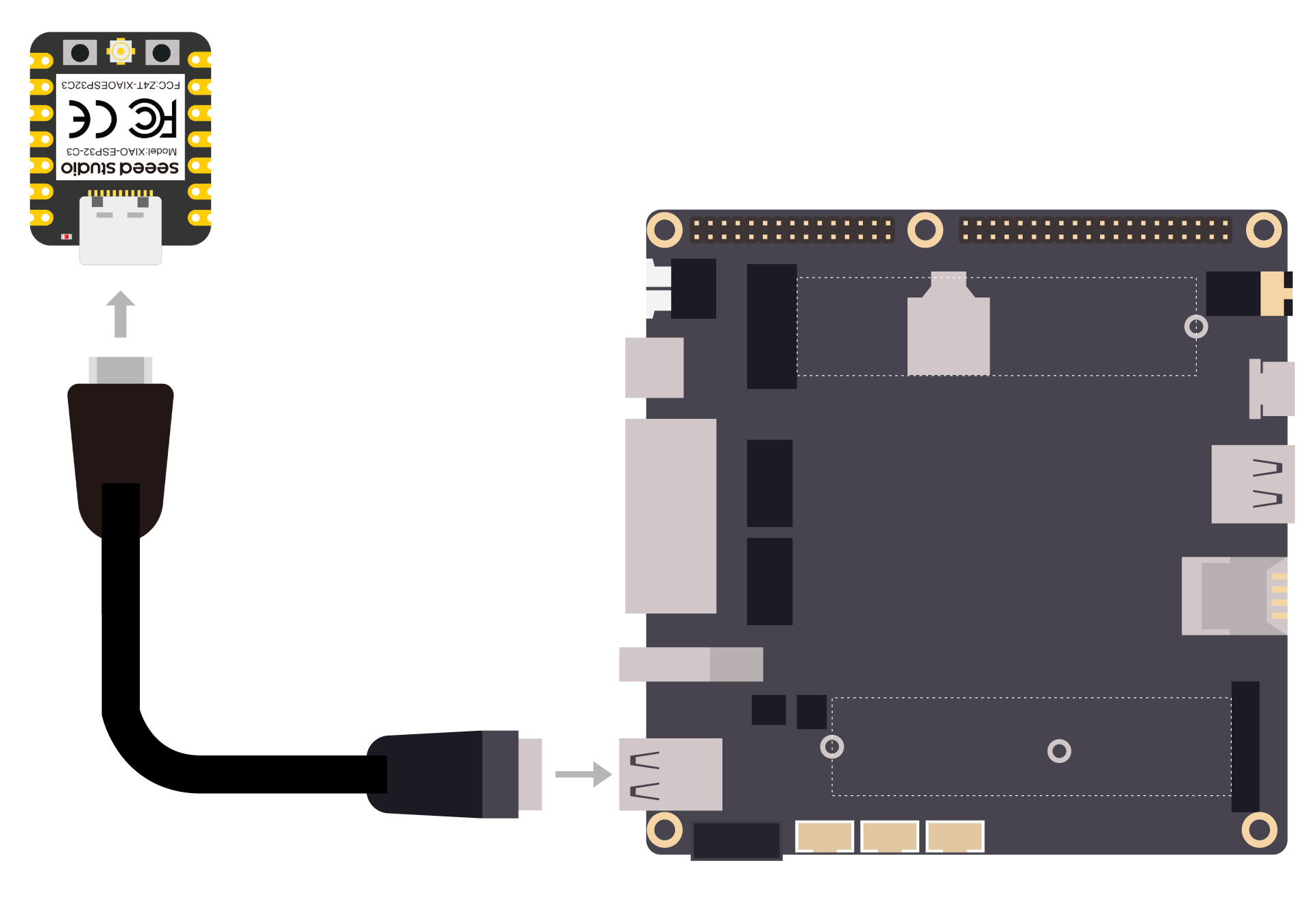
如果您使用的是 x86 设备并且可以在设备端口上看到 XIAO,那么您可以编译程序并将其上传到 XIAO。
将 XIAO 连接到您的设备。
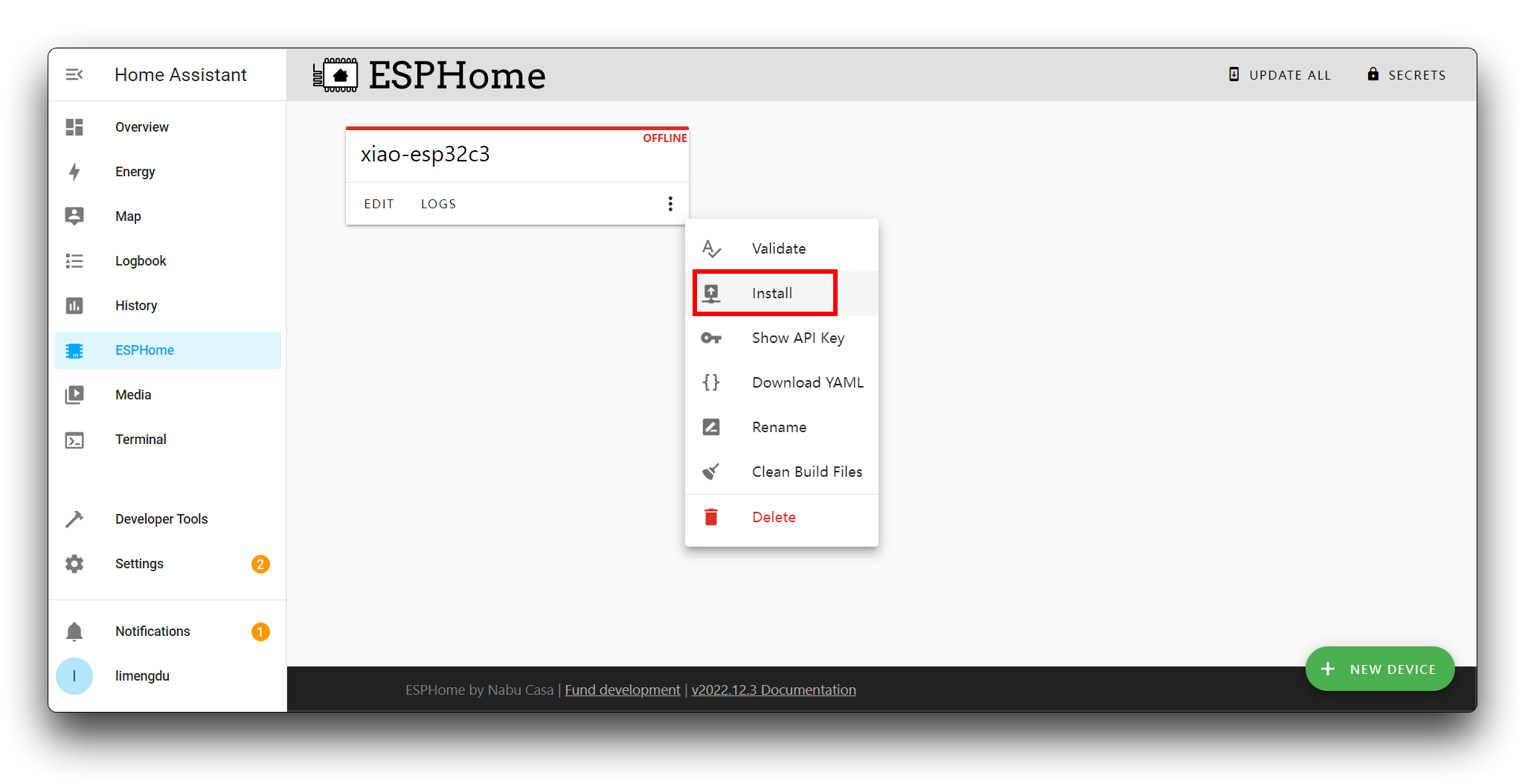
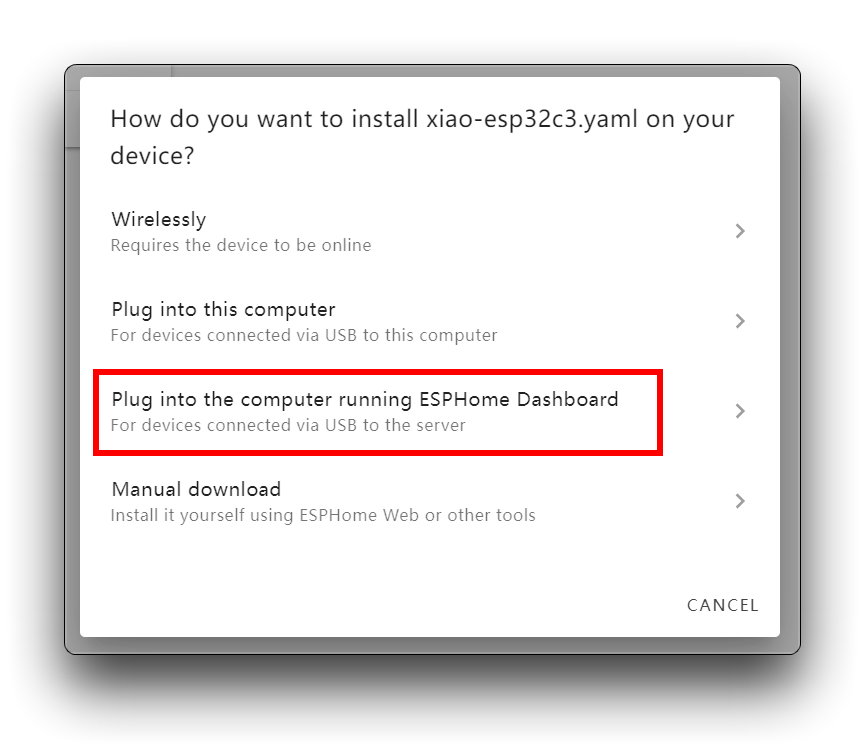
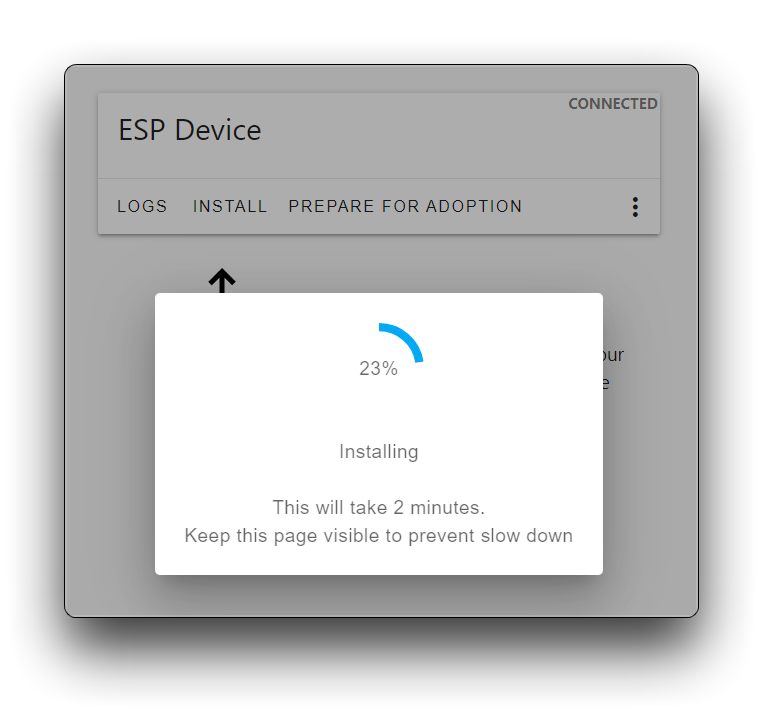
点击设备栏右下角的三个点,选择 Install。
点击 Plug into the computer running ESPHome Dashboard。
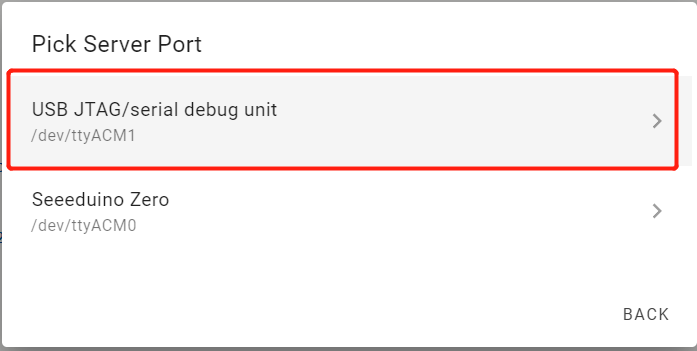
选择已连接的端口。
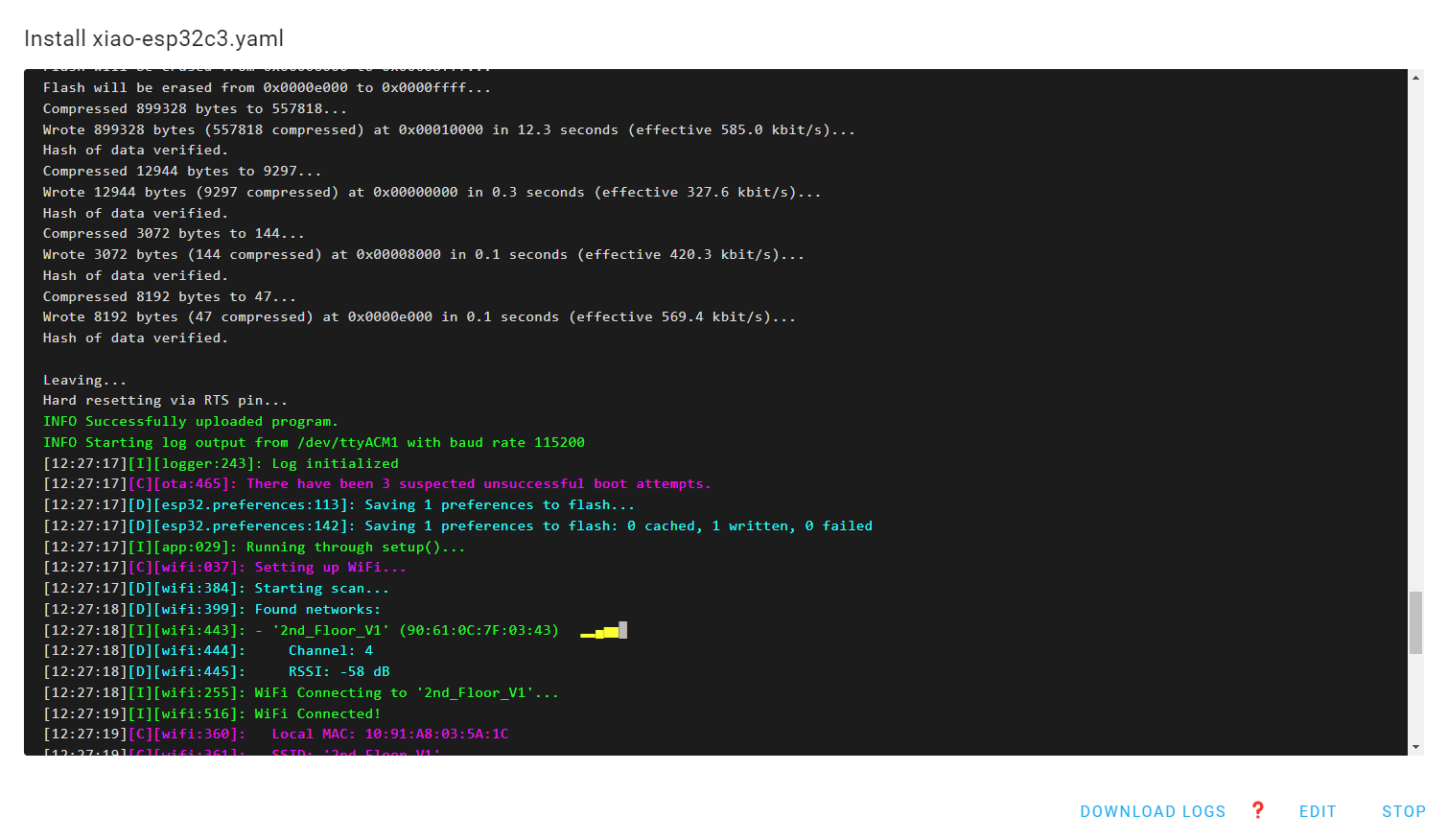
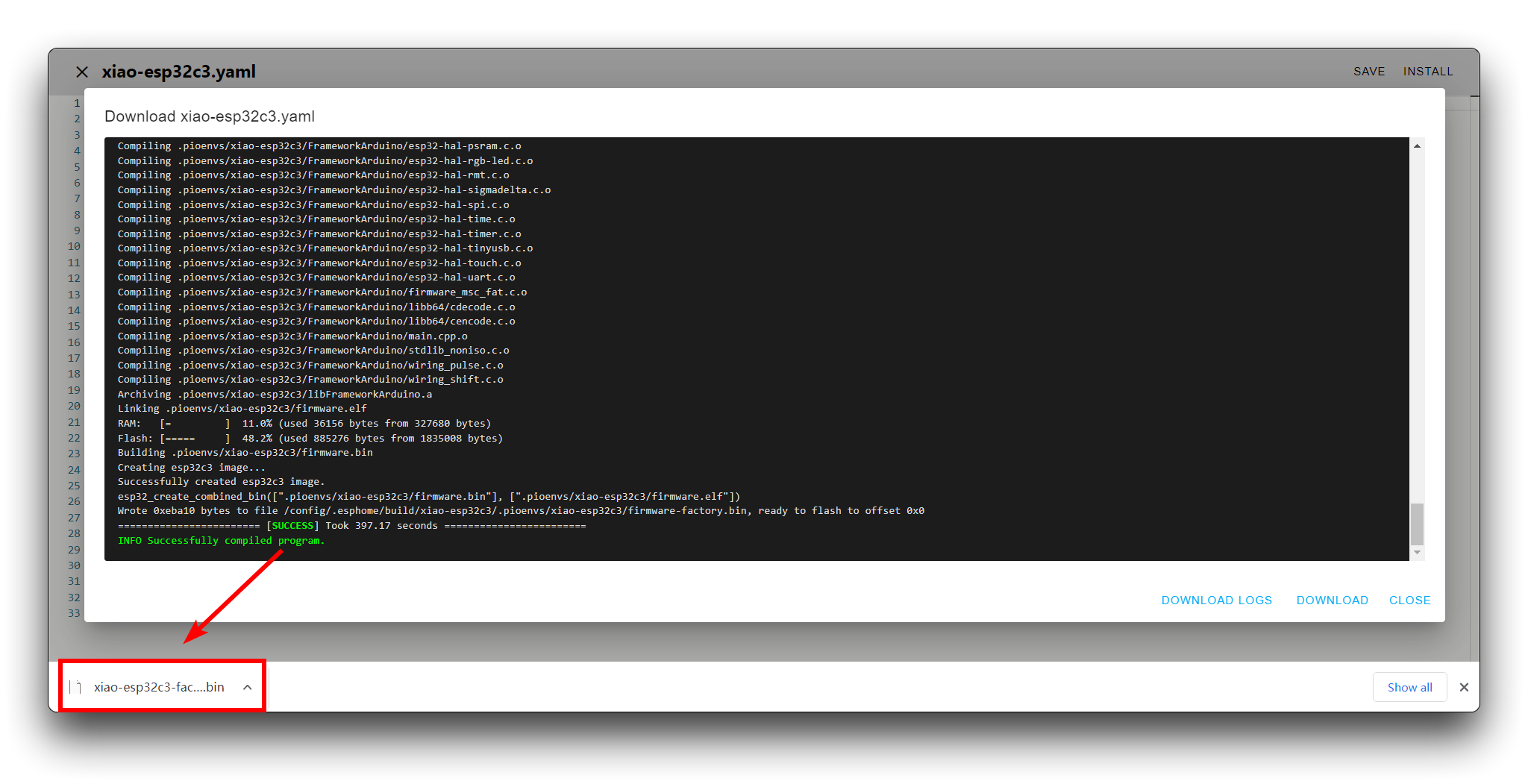
现在它将下载所有必要的开发板包并将 ESPHome 固件刷入 XIAO ESP32C3。如果刷写成功,您将看到以下输出。
如果在将 XIAO 连接到设备后无法找到端口,那么您可以尝试使用第二种方法。
- 方法 2:使用主机上传编译的固件
像 LinkStar H68K 这样的软路由不支持识别外部 MCU 设备,我们需要先下载编译好的固件,然后通过另一台 PC 上传固件。
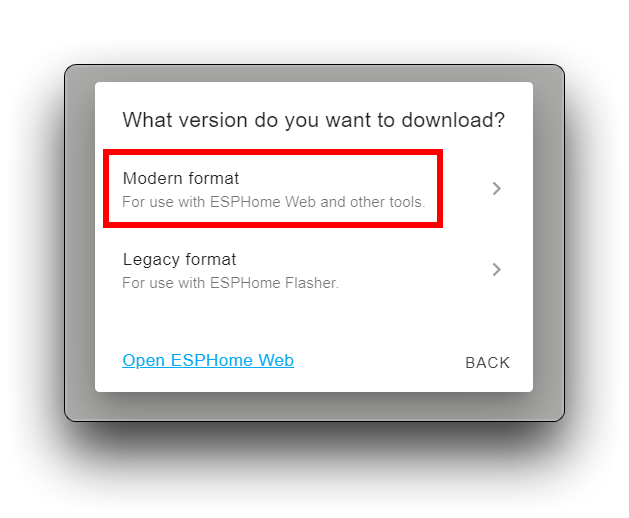
点击右上角的 Install 按钮。然后选择最后一项 Manual download。

选择 Modern format。
然后需要很长时间来下载和编译,请耐心等待。一切准备就绪后,固件将自动下载到您的计算机。
要将固件上传到 XIAO ESP32C3,这里有几个选项,我们展示 2 种方法:
- 选项 1:使用 ESPhome Web 工具 上传。
确保您已安装正确的驱动程序。以下是 ESP 设备中常用芯片的驱动程序。
-
CP2102 驱动程序:Windows & Mac
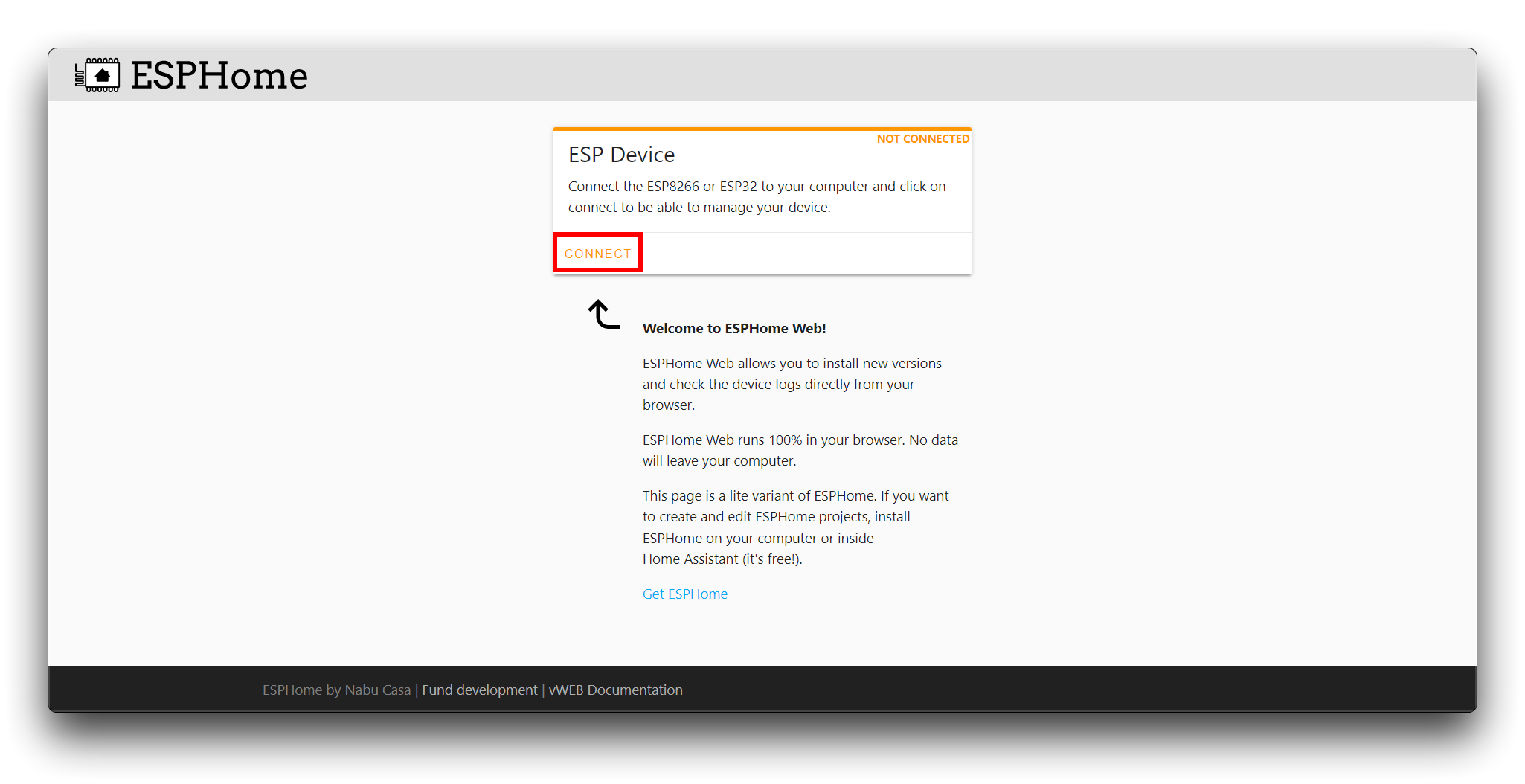
使用 Chrome 或 Edge 网络浏览器打开 ESPhome Web 工具。
点击 CONNECT。
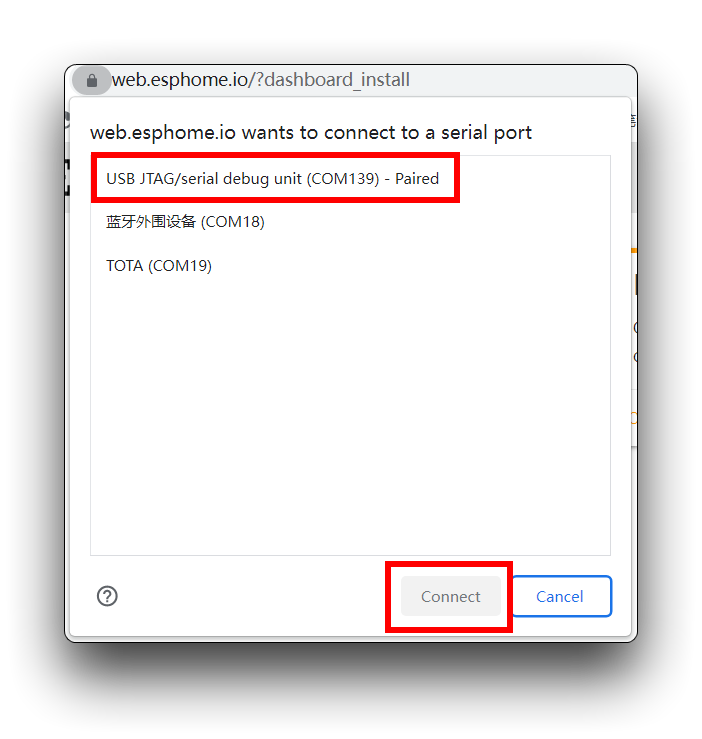
在弹出窗口中选择 XIAO ESP32 串口。
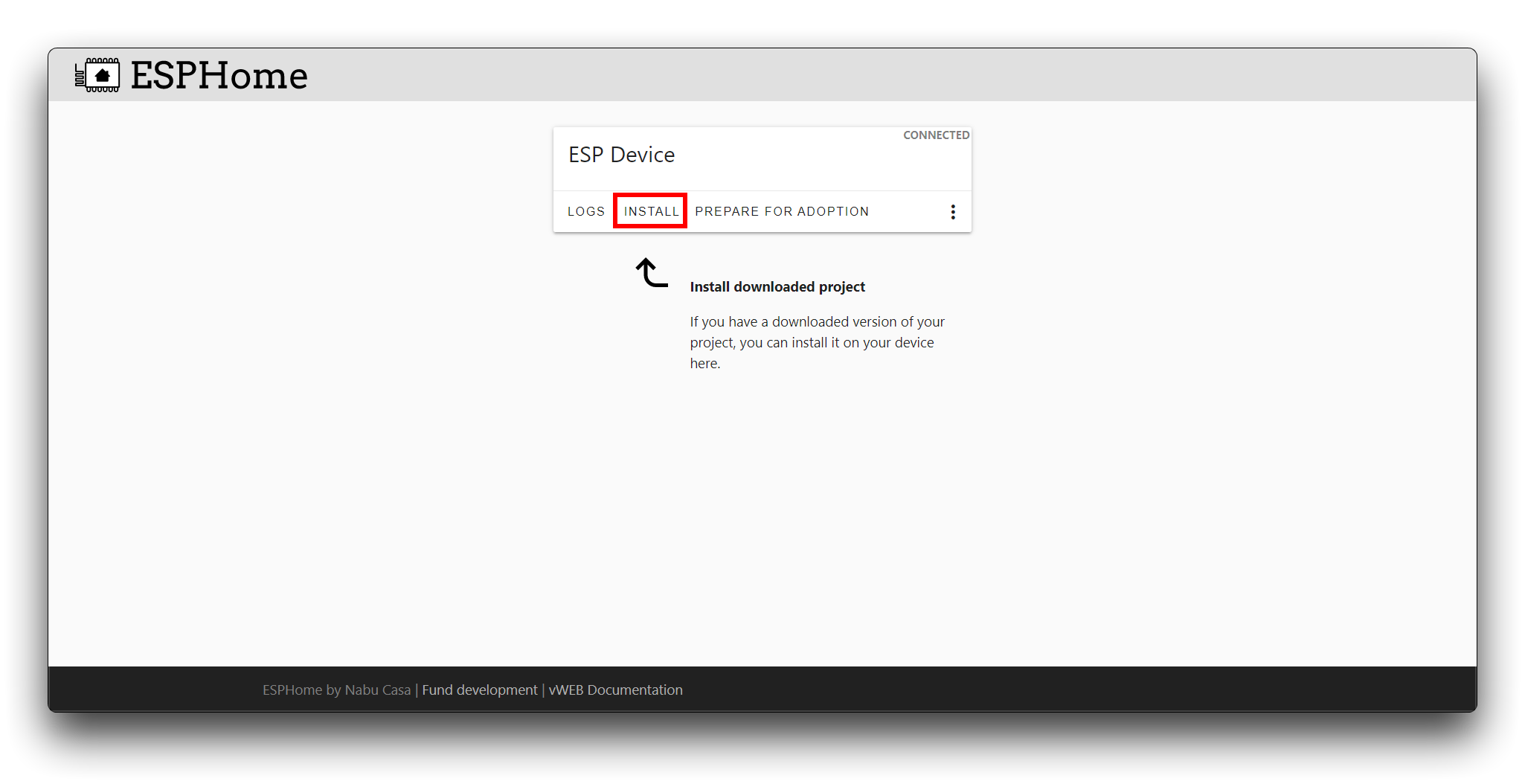
点击 INSTALL,然后选择从上述步骤下载的 .bin 文件。
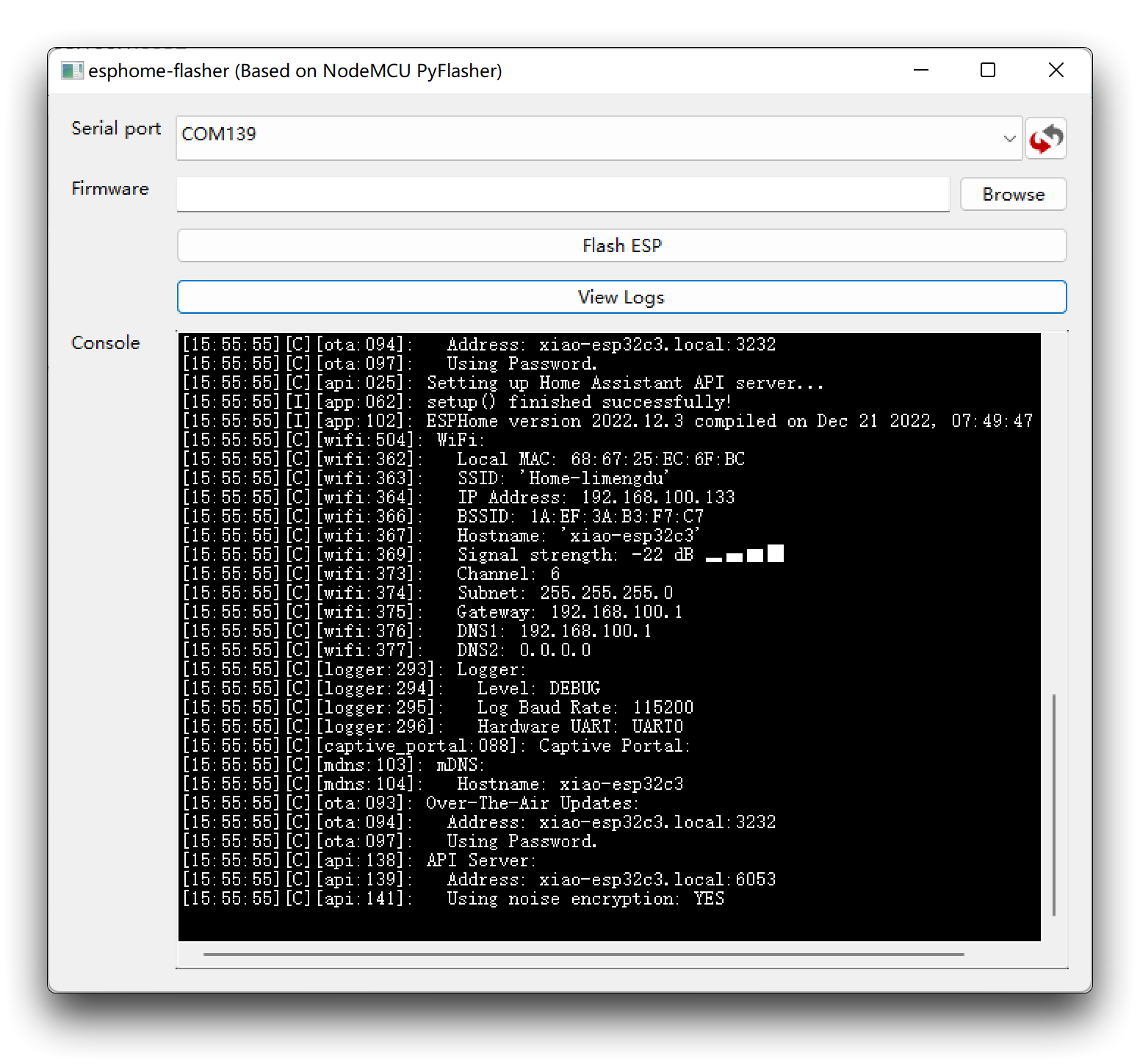
- 选项 2:使用 esphome-flasher 工具。
如果在安装驱动程序和更换浏览器后仍无法使用方法一上传固件,那么您可以尝试使用方法二。具体的安装方法和说明请参考官方教程。
如果您希望观察 XIAO ESP32C3 的日志消息,您也可以通过此软件的 View Logs 按钮查看。
上传完成后,您可以将 XIAO ESP32C3 从 PC 断开连接(除非您需要查看日志),只需单独为 XIAO 供电即可。
如果一切顺利,XIAO ESP32C3 将搜索并连接到您为其设置的 WiFi。
就像我一样,我使用 LinkStar H68K 的网络。您可以在网络选项中找到它,并查看 LinkStar H68K 分配给它的 IP 地址。
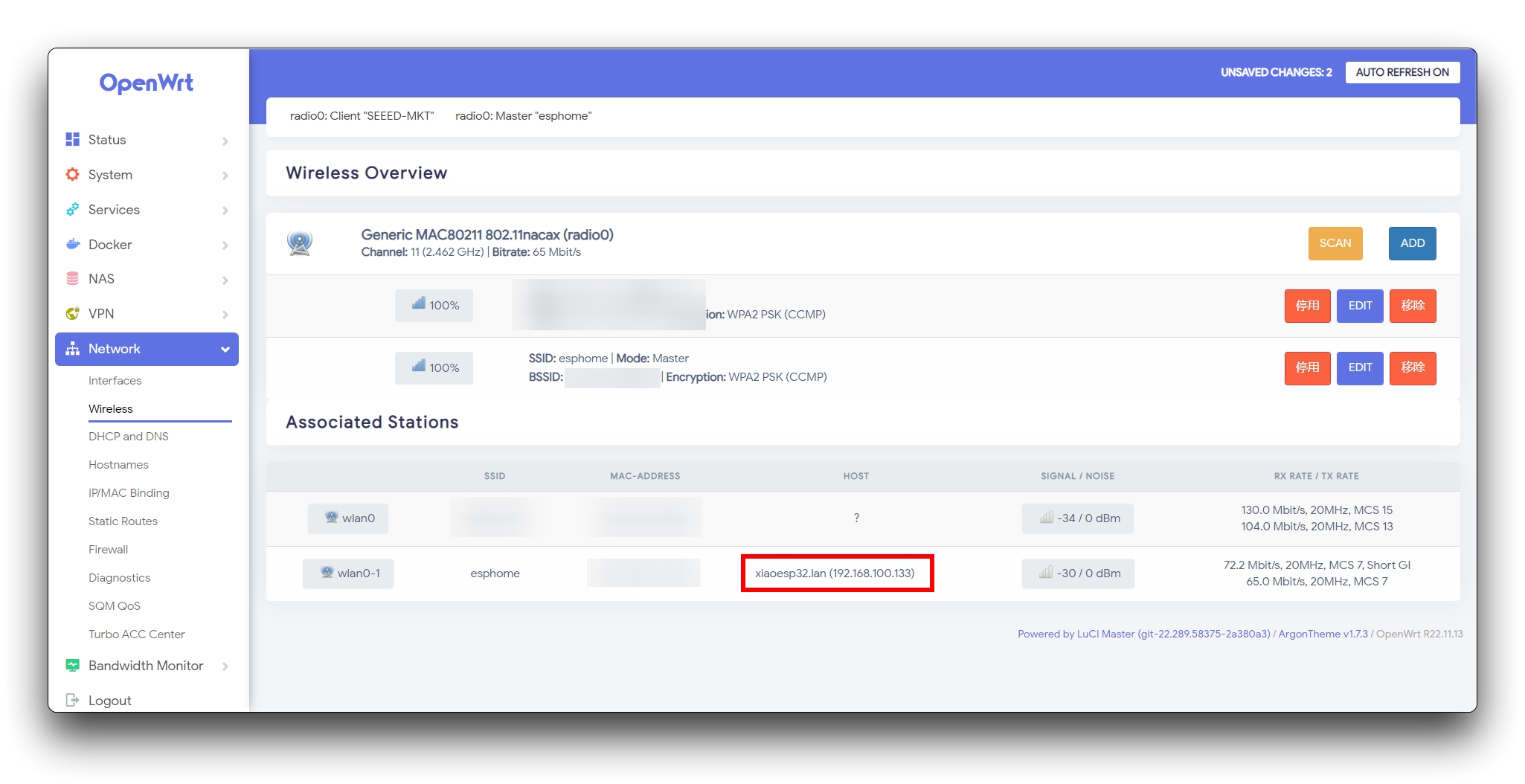
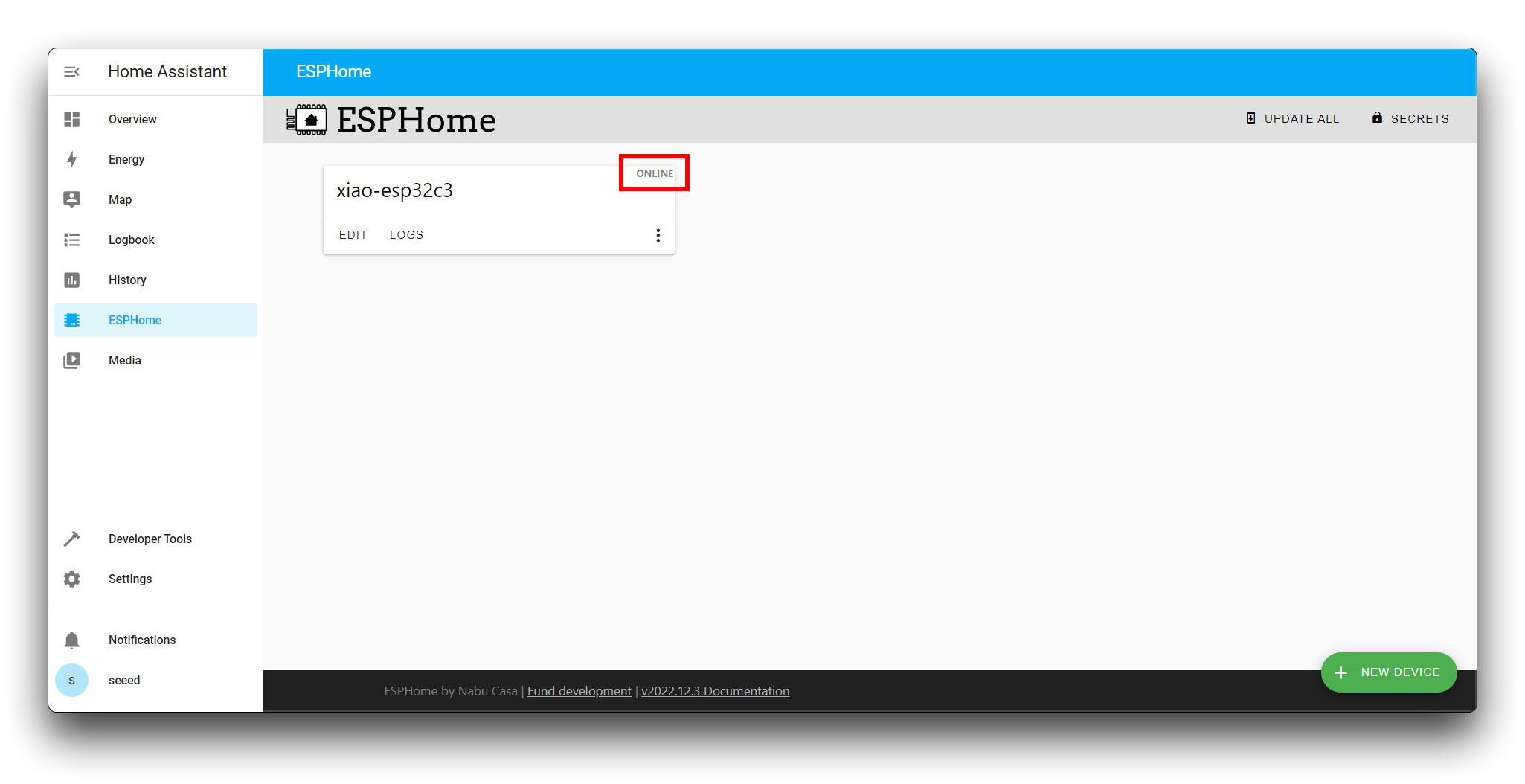
通常,此时在 Home Assistant 中,设备的状态也会从离线变为在线。
配置 Home Assistant 面板
步骤 6. 连接到 XIAO ESP32C3
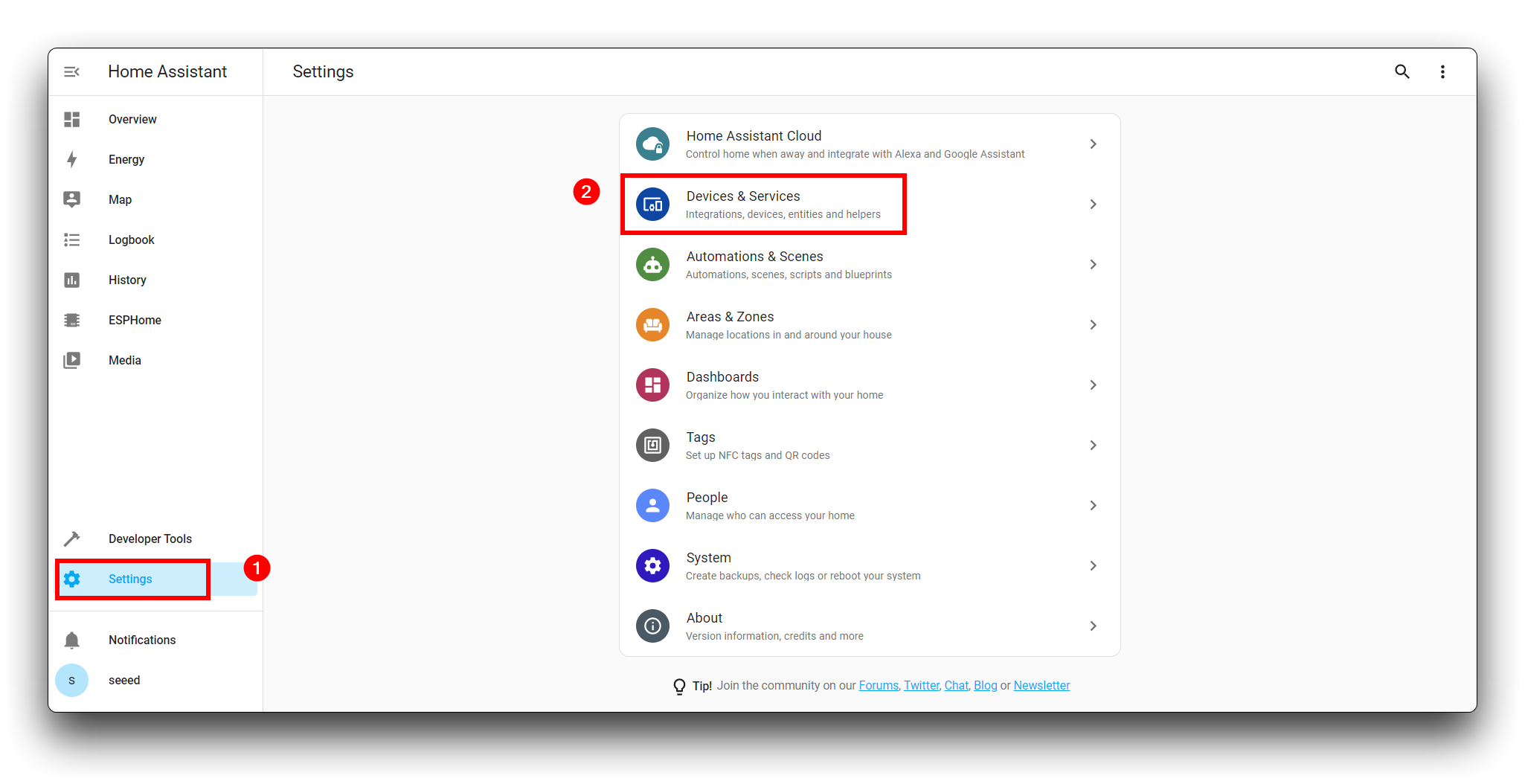
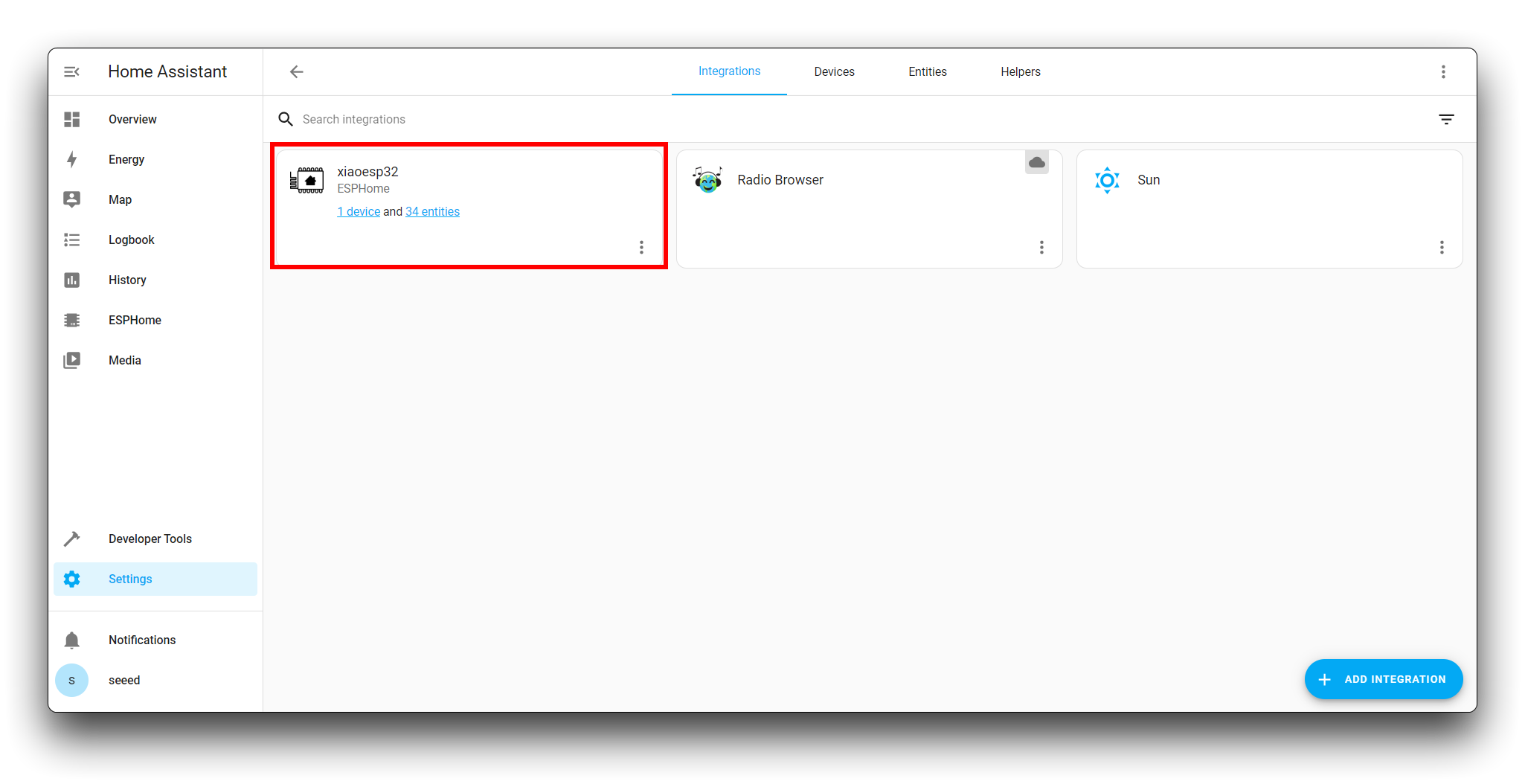
如果您的局域网上没有太多 Home Assistant 设备,Home Assistant 可以自动搜索并将您的 ESP 设备添加到设备选项卡中。您可以在设置中的设备和服务选项卡内看到此设备。
如果它没有自动搜索,您也可以基于 XIAO ESP32C3 的 IP 地址连接到它。
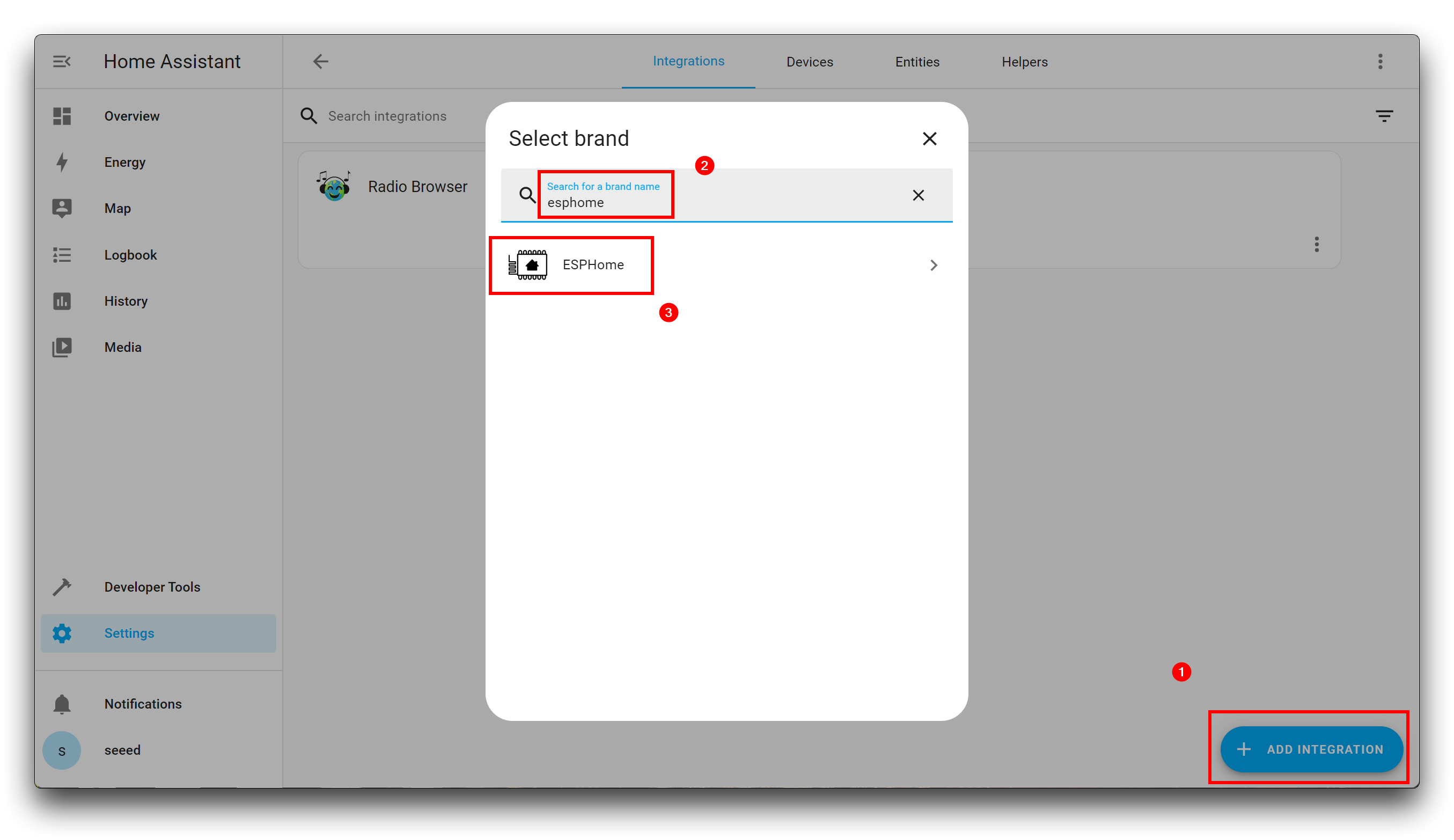
点击添加集成并搜索 esphome。
然后输入 XIAO ESP32C3 的 IP 地址和端口号 6053。然后点击提交。
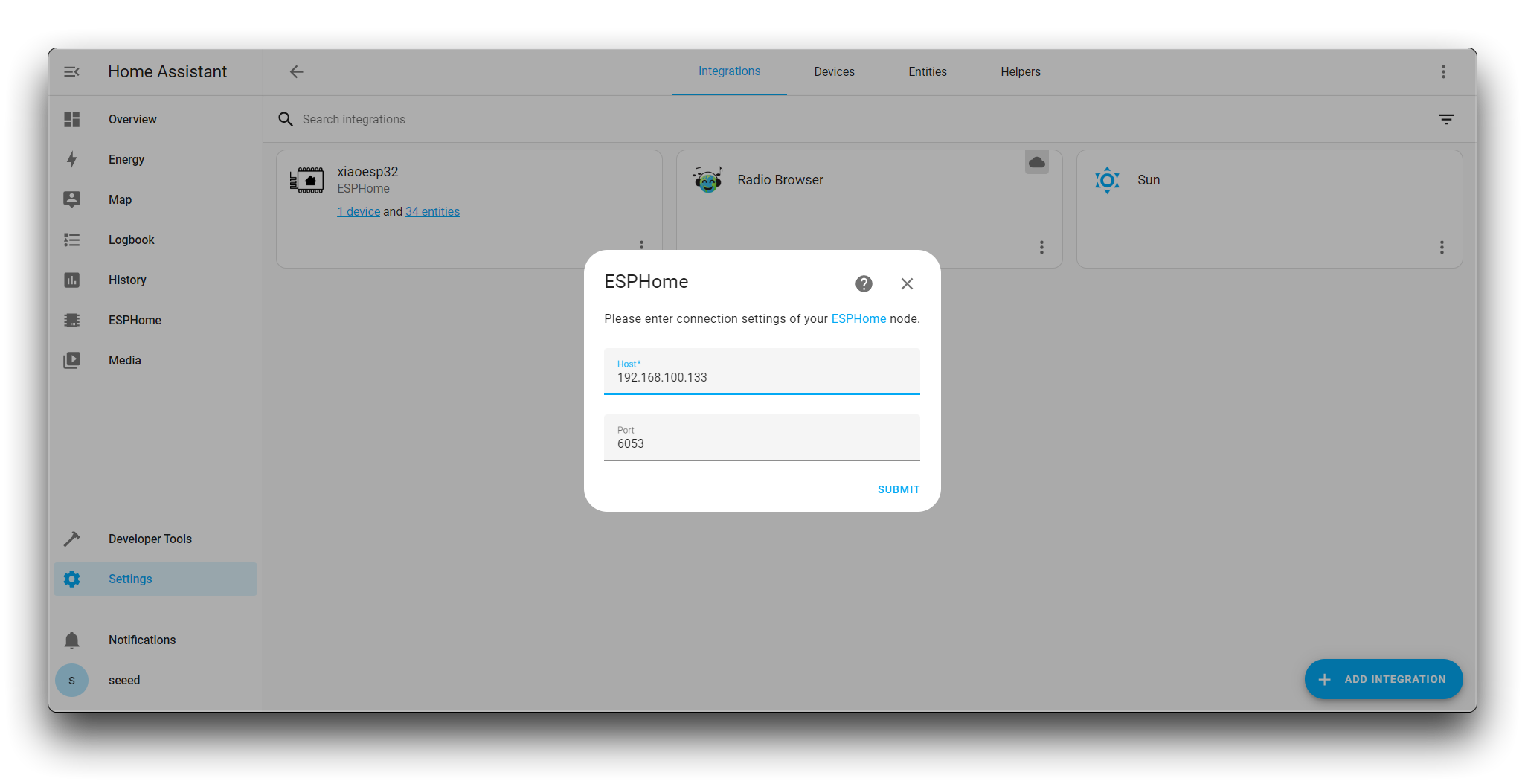
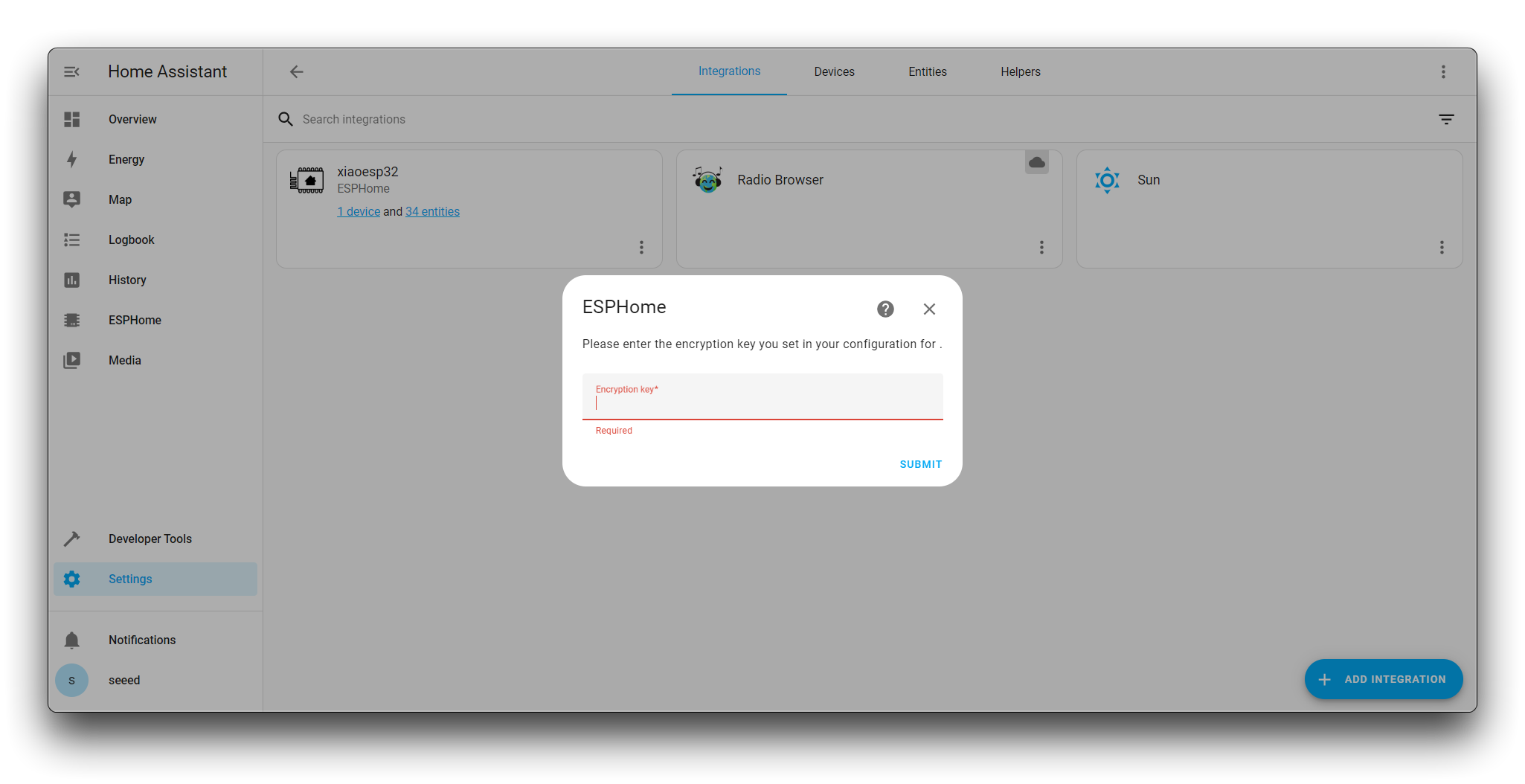
如果输入的 IP 地址和端口号正确,那么您将看到系统要求您输入加密密钥,这是我们在步骤 4 中要求保存的密钥。
然后点击提交。
至此,添加设备的步骤已成功完成。
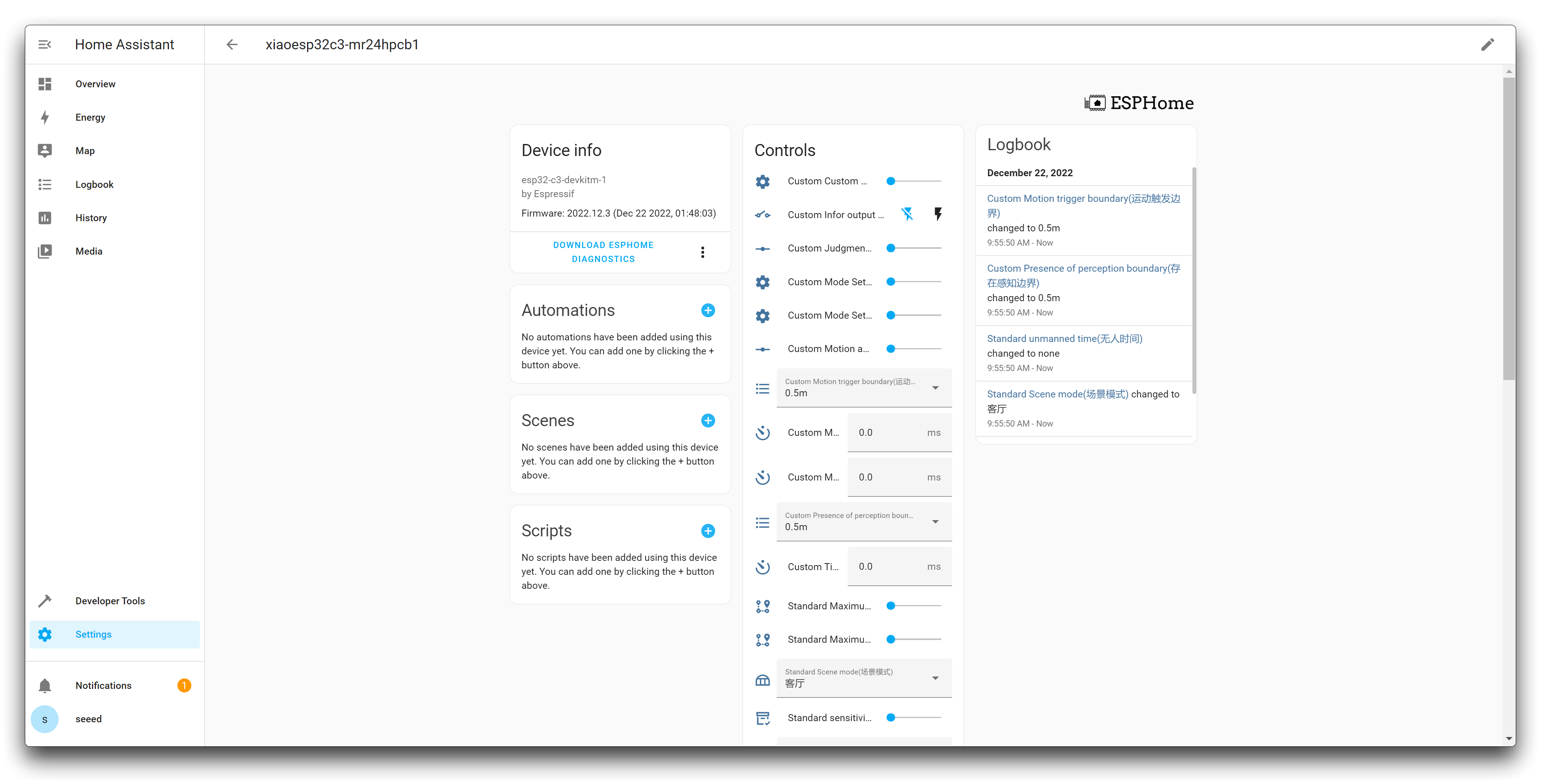
步骤 7. 24GHz 毫米波模块 Lite 功能概述
为了帮助您快速了解套件的全部功能和这些功能的使用方法,您需要仔细阅读本节。如果您想要更详细的信息,我们建议您花时间阅读产品用户手册。
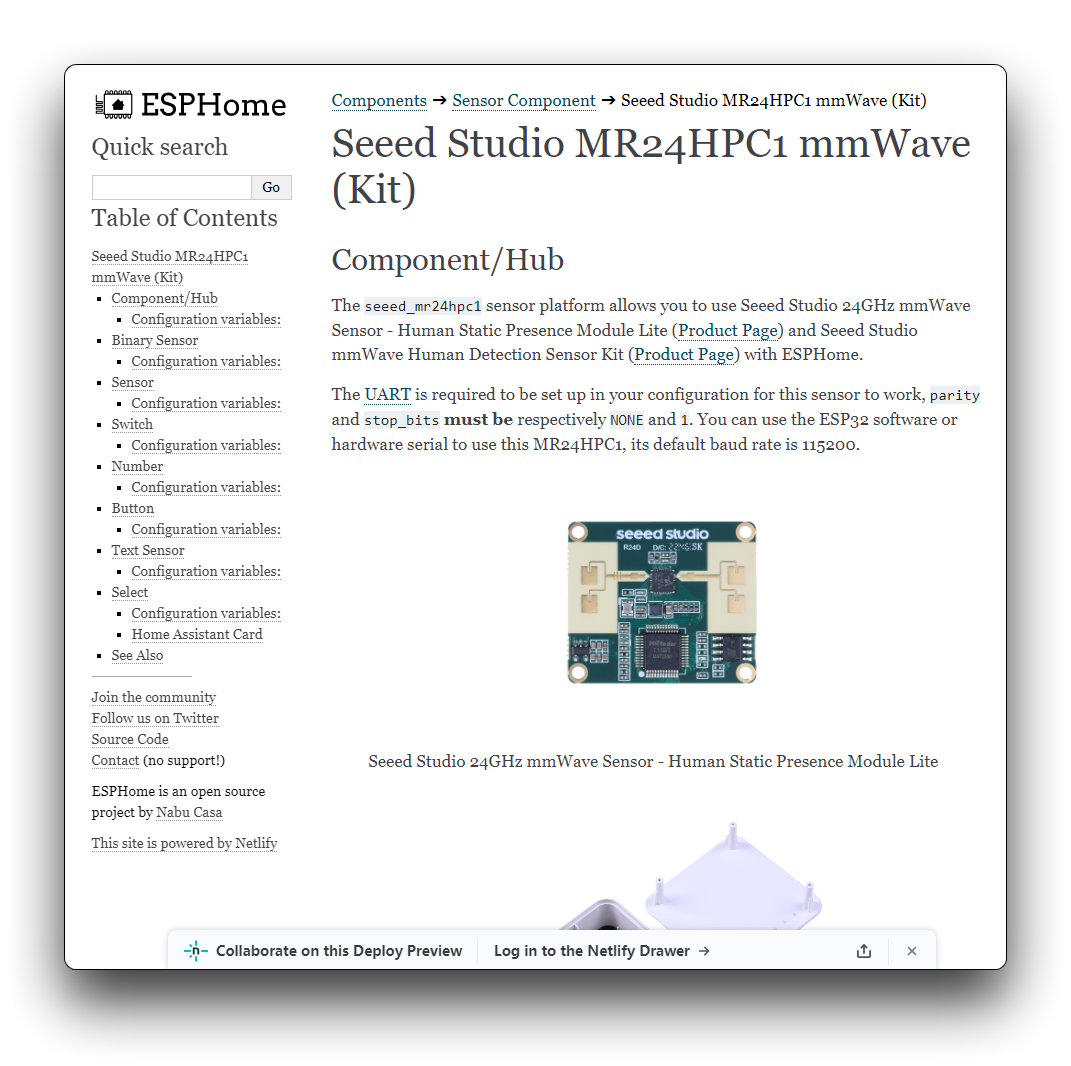
关于仪表板的配置和参数详情,我们在 ESPHome 文档中编写了详细的说明,请移步阅读完整的说明和详细信息。
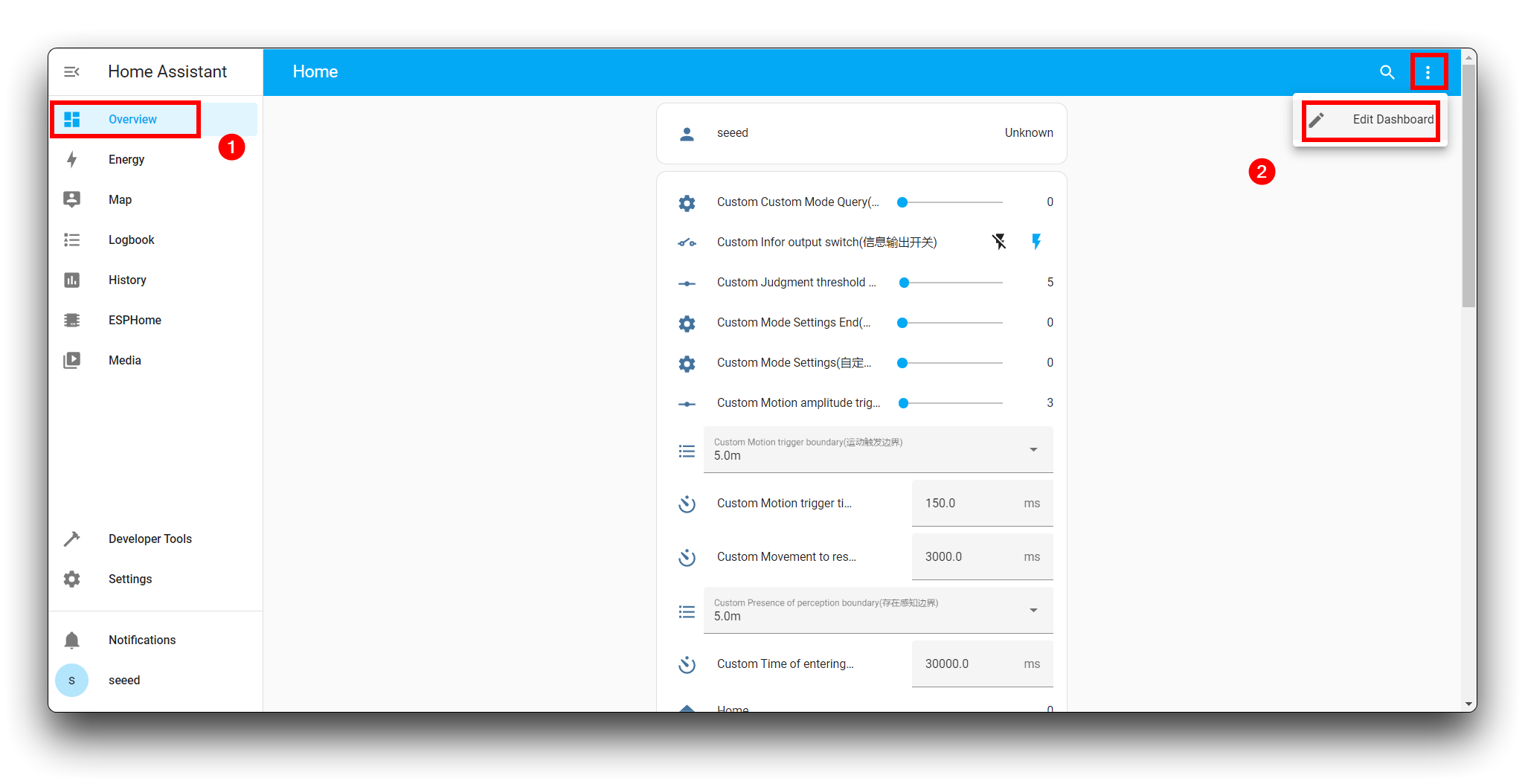
步骤 8. 配置 Home Assistant 面板
如果您觉得默认卡片非常无聊且不利于数据展示,Home Assistant 提供了各种现成的仪表板供您选择。
您可以根据自己的喜好制作自己的仪表板。
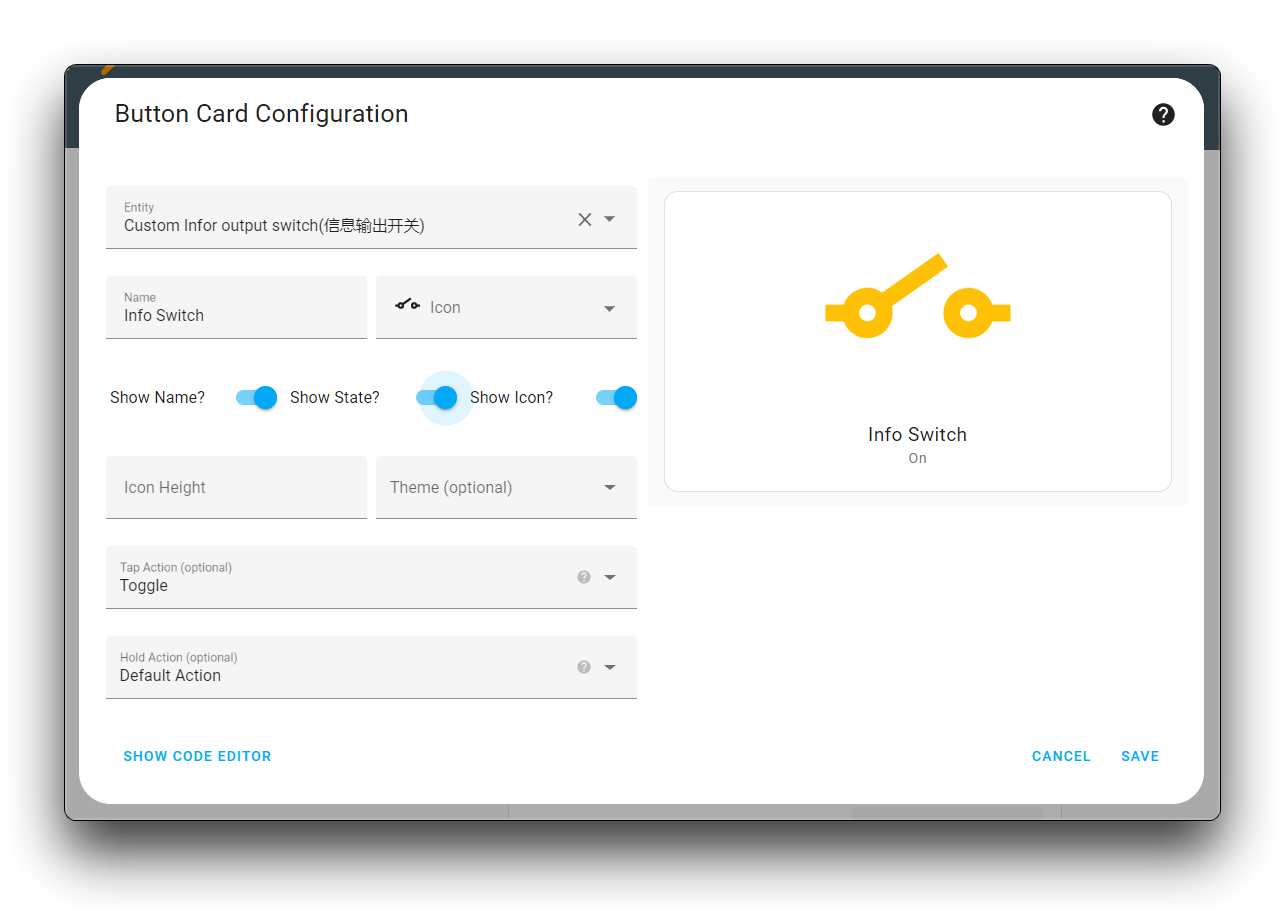
例如,将控制信息输出的选项变成一个漂亮的开关。
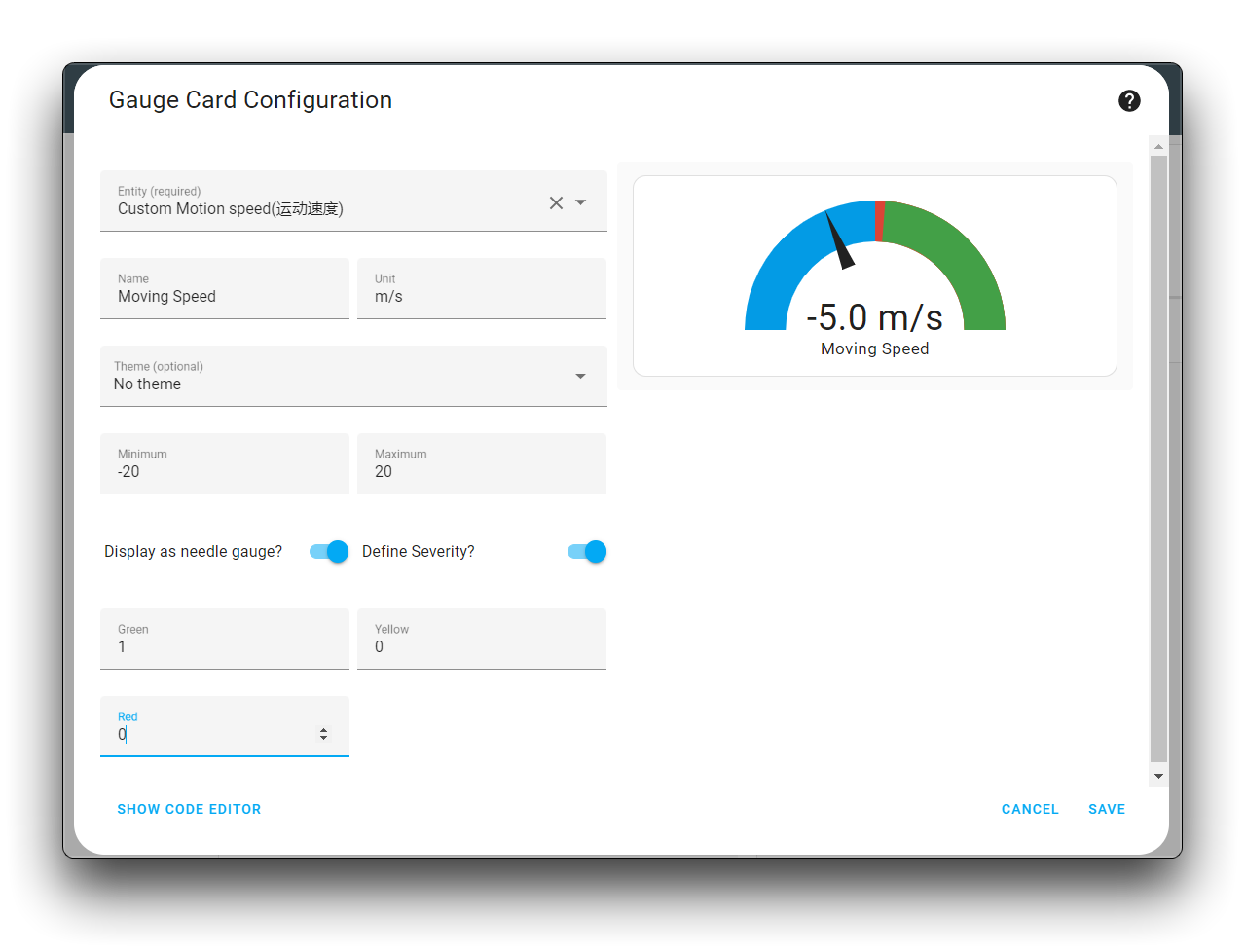
将人体移动速度转换为可视化仪表板显示。
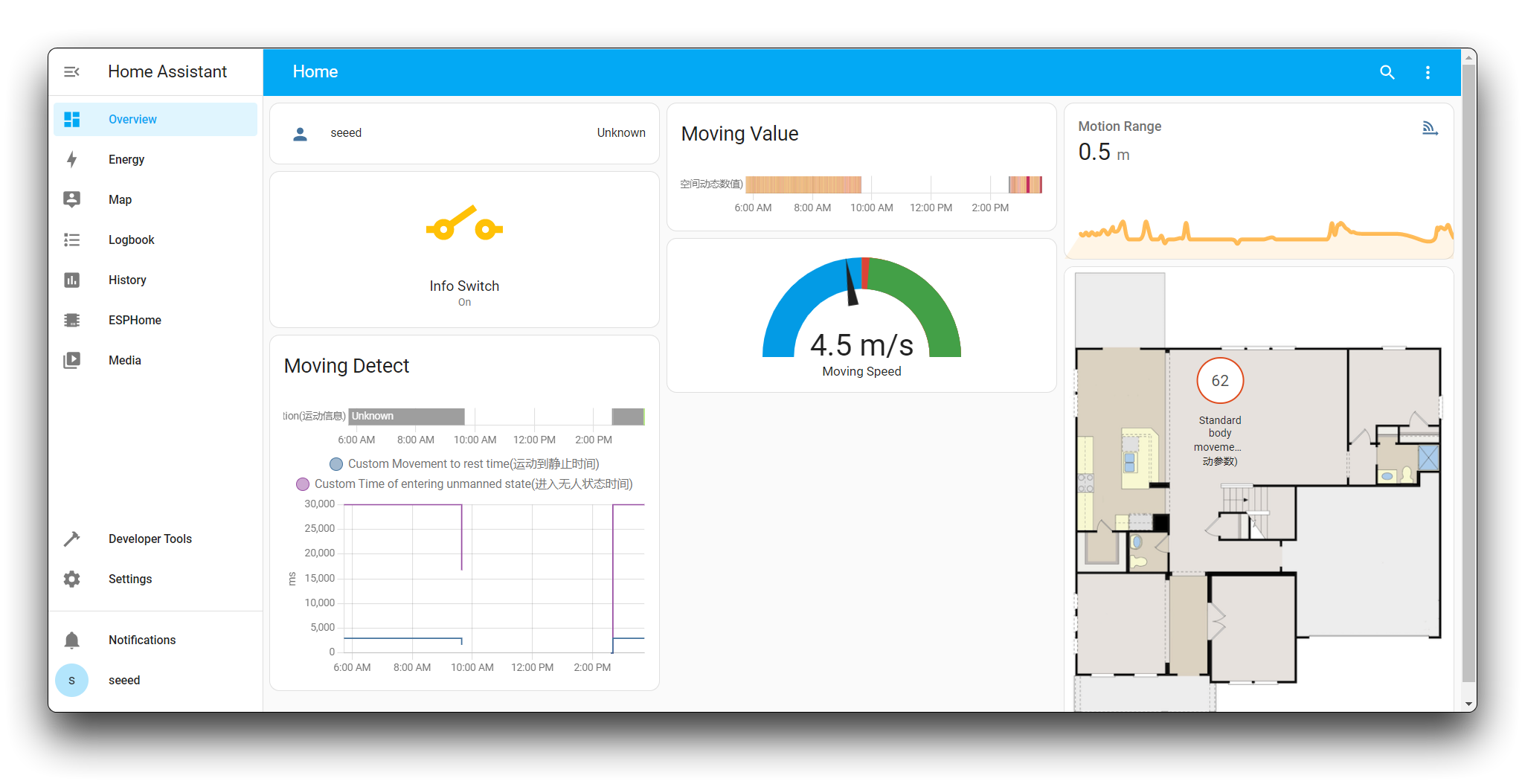
这是我设计的效果。看起来很有智能家居控制中心的样子。
到此为止,我们已经成功完成了我们的教程内容。
使用 XIAO ESP32C3 将 Grove 连接到 Home Assistant
当然,XIAO ESP32C3 不仅仅支持在 Home Assistant 中使用 24GHz mmWave 人体静态存在检测模块 Lite,您可以在本文档中找到更多教程供您自己使用。
发挥您的创造力!
故障排除
常见问题1:使用 ESPhome Web 工具上传固件时出现以下错误,如何解决?
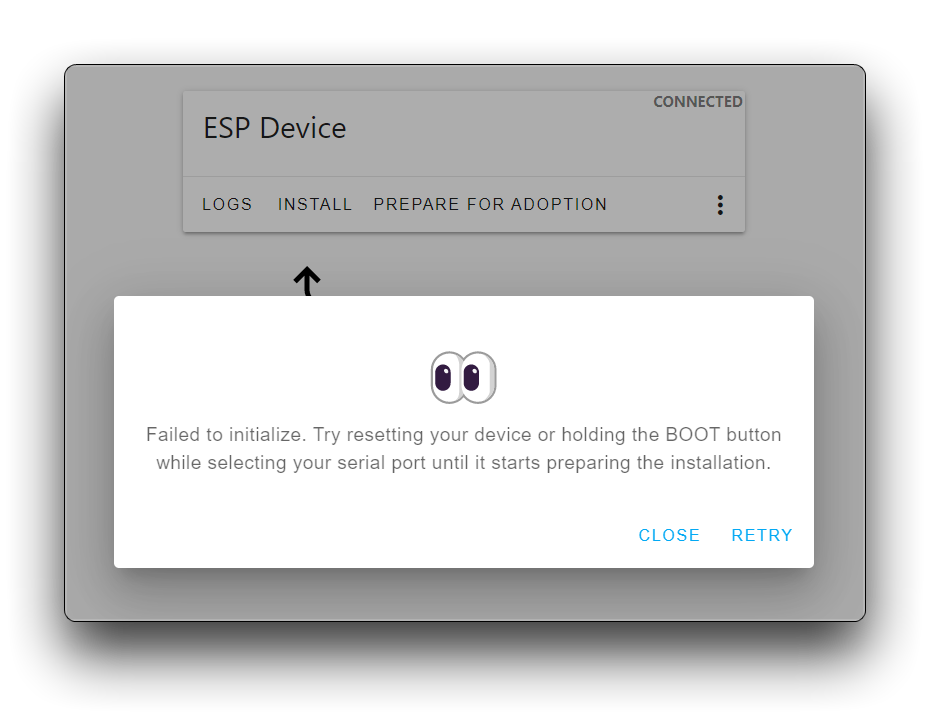
答:如果在上传时出现此提示,请断开 XIAO ESP32C3 与 PC 的连接。然后,按住 BOOT 按钮,在按住 BOOT 按钮的同时将开发板连接到 PC,然后松开按钮进入引导加载程序模式。此时重新连接并再次上传固件即可。
常见问题2:按照 esphome flasher 教程在 Linux 下无法安装 esphome flasher?
答:执行以下命令时,您需要选择您的系统版本,否则会出现错误。例如,我的计算机是 Ubuntu 22.04,那么应该执行的命令如下。
sudo apt install python3
pip3 install -U \
-f https://extras.wxpython.org/wxPython4/extras/linux/gtk3/ubuntu-22.04/ \
wxPython
pip3 install esphomeflasher
FAQ3: 我填写了正确的WiFi和密码,为什么看不到XIAO ESP32C3的IP地址?
A: 当您遇到这个问题时,请检查XIAO ESP32C3的天线是否连接到位。如果天线已经连接,请确保XIAO与LinkStar的距离不超过3米(除非您已经更换了更强大的天线)。 如果您仍然看不到XIAO,您可以使用esphome flasher软件检查XIAO的日志信息,并通过日志检查XIAO的连接情况。 您可以重新插拔xiao,让它尝试重新搜索WiFi并连接。
FAQ4: 我使用Jlink刷写固件,但出现错误"Programming of range @address 0x08000000 failed (block verification error) Program failed Failed to program and verify target"?
当您使用Jlink刷写固件并出现此错误时,您可能处于以下任一情况中。
- 您的传感器完全无法正常工作,您无法从中接收任何消息。
- 您正在尝试使用无效或错误的固件。
如果您的雷达原本工作正常,请再次检查您使用的固件是否正确!使用的固件因雷达而异,因传感器型号而异!并且通过UART升级固件与通过Jlink升级固件是不同的!请停止执行以下步骤。
我已确认我的产品在异常情况下出现此错误消息
如果您的雷达完全无法工作,那么出现此错误消息可能是正常的。
因为雷达的异常运行已经触发了雷达的读/写保护机制,一般不再允许用户对产品进行刷写程序,所以我们需要解锁雷达的读/写保护机制。
由于解除读写保护的风险很高,我们不会在此处单独向公众公开解除读写保护的方法,我们将把该方法放在此处的zip文件中供需要的人使用。一旦异常雷达被解除保护,就可以再次更新固件以恢复正常运行。
技术支持与产品讨论
感谢您选择我们的产品!我们在这里为您提供不同的支持,以确保您使用我们产品的体验尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。