Seeed Studio XIAO MG24 Sense 内置传感器使用方法
XIAO MG24 Sense IMU
内置传感器概述
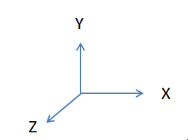
6轴 IMU(惯性测量单元) 传感器如 LSM6DS3TR-C 集成了加速度计和陀螺仪,用于测量物体在三维空间中的运动和方向。具体来说,LSM6DS3TR-C 具有以下特性:
加速度计功能:
- 测量物体沿 X、Y 和 Z 轴的加速度。它能够感知物体运动(例如,静止、加速、减速)和倾斜变化(例如,物体的角度)。
- 可用于检测步态、位置变化、振动等。
陀螺仪功能:
- 测量物体围绕 X、Y 和 Z 轴的角速度,即物体的旋转。
- 可用于检测旋转、旋转速率和方向变化。
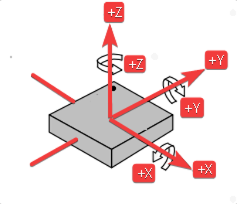
- X轴角度(Roll) 是围绕X轴旋转方向的角度。
- Y轴角度(Pitch) 是围绕Y轴旋转方向的角度。
- Z轴角度(Yaw) 是围绕Z轴旋转方向的角度。
软件准备
点击 github 下载链接获取六轴传感器驱动库。
代码实现
#include <LSM6DS3.h>
#include <Wire.h>
//Create a instance of class LSM6DS3
LSM6DS3 myIMU(I2C_MODE, 0x6A); //I2C device address 0x6A
float aX, aY, aZ, gX, gY, gZ;
const float accelerationThreshold = 2.5; // threshold of significant in G's
const int numSamples = 119;
int samplesRead = numSamples;
void setup() {
// put your setup code here, to run once:
Serial.begin(9600);
while (!Serial);
pinMode(PD5,OUTPUT);
digitalWrite(PD5,HIGH);
//Call .begin() to configure the IMUs
if (myIMU.begin() != 0) {
Serial.println("Device error");
} else {
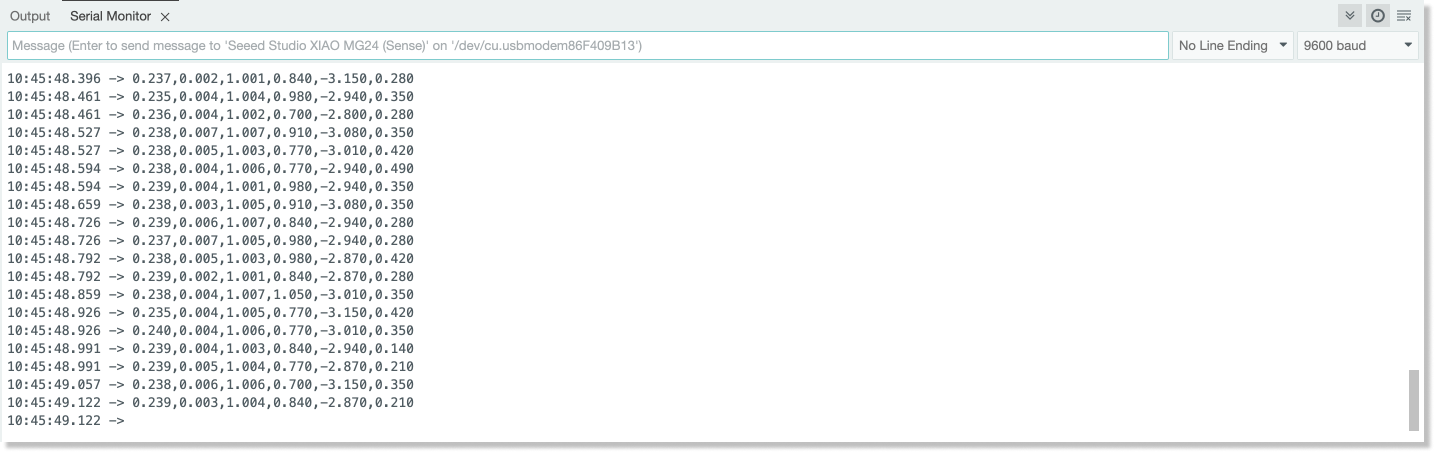
Serial.println("aX,aY,aZ,gX,gY,gZ");
}
}
void loop() {
// wait for significant motion
while (samplesRead == numSamples) {
// read the acceleration data
aX = myIMU.readFloatAccelX();
aY = myIMU.readFloatAccelY();
aZ = myIMU.readFloatAccelZ();
// sum up the absolutes
float aSum = fabs(aX) + fabs(aY) + fabs(aZ);
// check if it's above the threshold
if (aSum >= accelerationThreshold) {
// reset the sample read count
samplesRead = 0;
break;
}
}
// check if the all the required samples have been read since
// the last time the significant motion was detected
while (samplesRead < numSamples) {
// check if both new acceleration and gyroscope data is
// available
// read the acceleration and gyroscope data
samplesRead++;
// print the data in CSV format
Serial.print(myIMU.readFloatAccelX(), 3);
Serial.print(',');
Serial.print(myIMU.readFloatAccelY(), 3);
Serial.print(',');
Serial.print(myIMU.readFloatAccelZ(), 3);
Serial.print(',');
Serial.print(myIMU.readFloatGyroX(), 3);
Serial.print(',');
Serial.print(myIMU.readFloatGyroY(), 3);
Serial.print(',');
Serial.print(myIMU.readFloatGyroZ(), 3);
Serial.println();
if (samplesRead == numSamples) {
// add an empty line if it's the last sample
Serial.println();
}
}
}
由于 LSM6DS3 库的更新,如果您之前已经添加了此库,您需要重新下载 2.0.4 或更高版本并将 ZIP 文件添加到 Arduino。
功能概述
-
包含库
#include <LSM6DS3.h>
#include <Wire.h>- 包含用于与LSM6DS3传感器通信的库。
- 包含用于I2C通信的库。
-
创建传感器实例
LSM6DS3 myIMU(I2C_MODE, 0x6A)为IMU传感器创建LSM6DS3类的实例,指定I2C通信模式和设备地址0x6A。
-
变量和常量
float aX, aY, aZ, gX, gY, gZ:用于存储加速度计和陀螺仪数据的变量。const float accelerationThreshold = 2.5:用于检测显著运动的阈值,单位为G。const int numSamples = 119:检测到显著运动后要收集的样本数量。int samplesRead = numSamples:将样本计数器初始化为总样本数,表示尚未收集任何数据。
-
基本设置
pinMode(PD5,OUTPUT);
digitalWrite(PD5,HIGH);- 打开陀螺仪使能引脚。
-
数据处理
aX = myIMU.readFloatAccelX();:
aY = myIMU.readFloatAccelY();:
aZ = myIMU.readFloatAccelZ();:
float aSum = fabs(aX) + fabs(aY) + fabs(aZ);- 读取沿X轴的加速度。
- 读取沿Y轴的加速度。
- 读取沿Z轴的加速度。
- 计算加速度数据绝对值的总和,
fabs()返回绝对值。
// check if it's above the threshold
if (aSum >= accelerationThreshold) {
// reset the sample read count
samplesRead = 0;
break;
}- 如果绝对加速度值的总和大于或等于设定的阈值,则将采样计数 samplesRead 重置为 0 并退出循环。
-
检查数据
while (samplesRead < numSamples) {
samplesRead++;
.
.
.
.
.
if (samplesRead == numSamples) {
// add an empty line if it's the last sample
Serial.println();
}
}- 进入另一个循环并检查是否已读取所需数量的样本。
- 增加 samplesRead 的计数。
- 如果所有样本都已读取,打印一个空行来分隔数据输出。
结果图表
更多内容
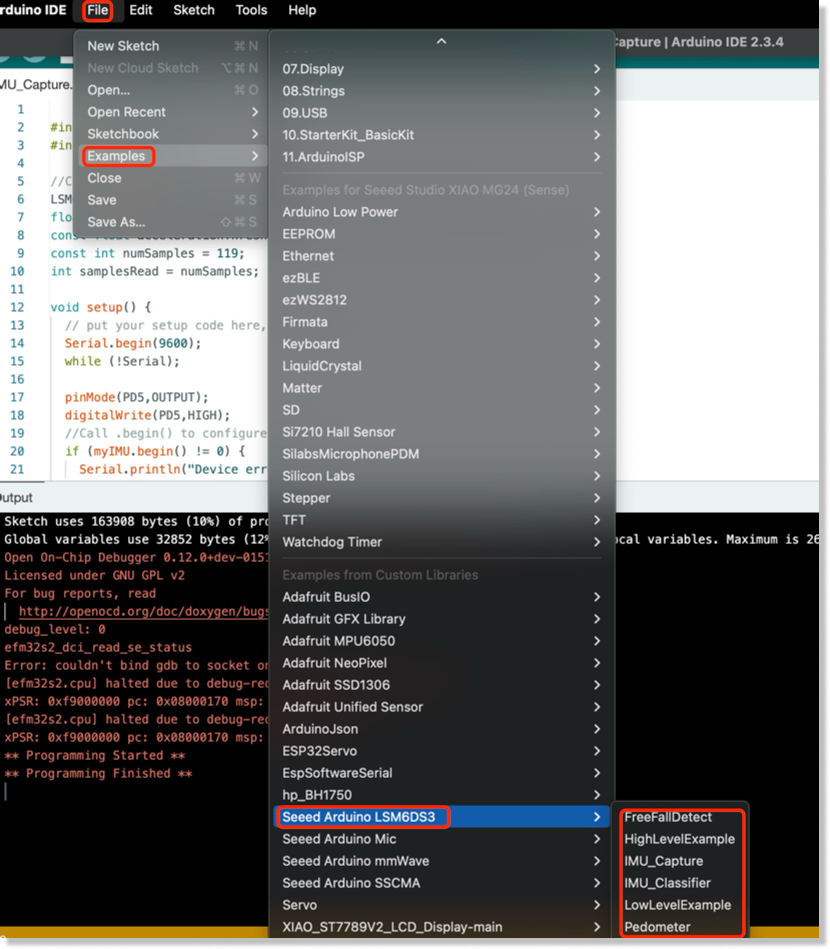
如果您想要更多示例代码,请点击:"File" -> Example -> Seeed Arduino LSM6DS3"
IMU 高级演示
硬件准备


软件准备
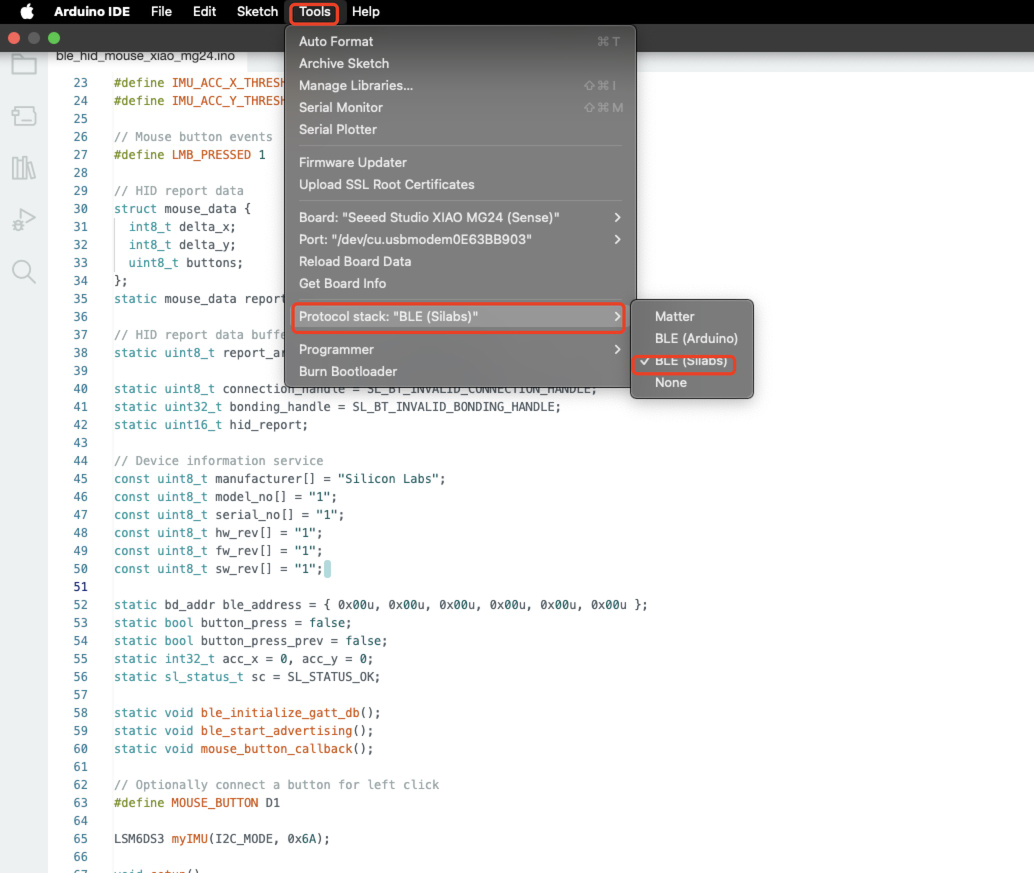
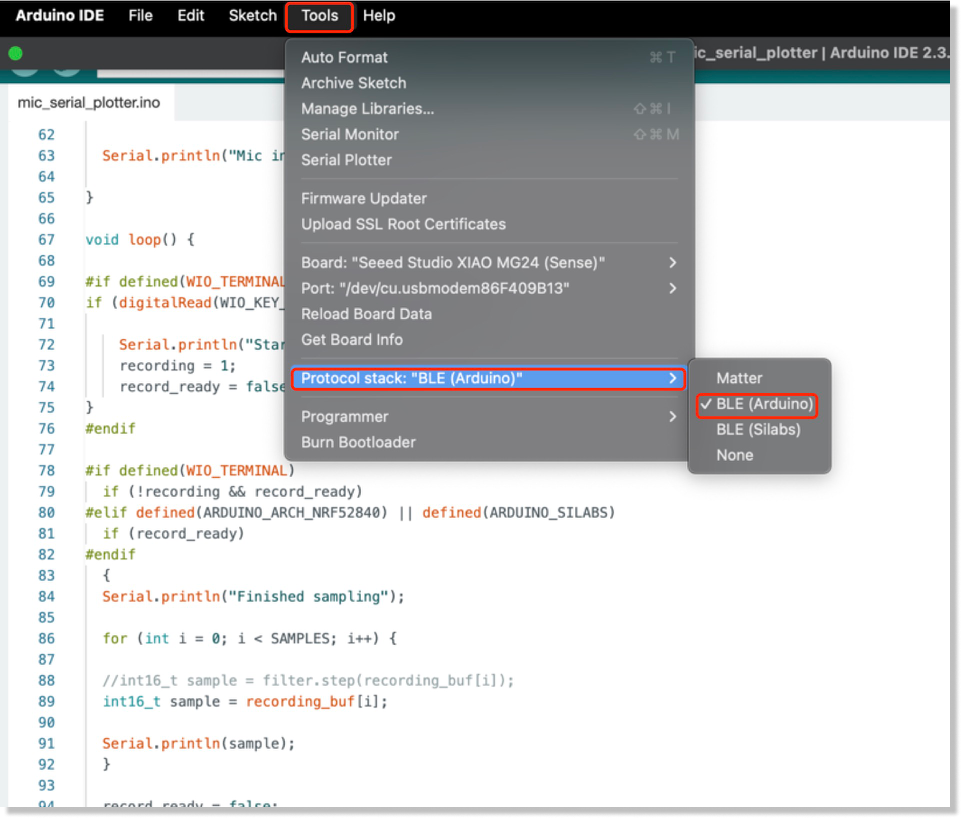
我们需要在工具栏中选择相应的堆栈来烧录程序。
程序代码
#include <LSM6DS3.h>
#include "Wire.h"
#define DEVICE_NAME "XIAO MG24 Mouse"
#define IMU_ACC_X_THRESHOLD 10
#define IMU_ACC_Y_THRESHOLD 10
// Mouse button events
#define LMB_PRESSED 1
// HID report data
struct mouse_data {
int8_t delta_x;
int8_t delta_y;
uint8_t buttons;
};
static mouse_data report;
// HID report data buffer
static uint8_t report_array[] = { 0x00, 0x00, 0x00 };
static uint8_t connection_handle = SL_BT_INVALID_CONNECTION_HANDLE;
static uint32_t bonding_handle = SL_BT_INVALID_BONDING_HANDLE;
static uint16_t hid_report;
// Device information service
const uint8_t manufacturer[] = "Silicon Labs";
const uint8_t model_no[] = "1";
const uint8_t serial_no[] = "1";
const uint8_t hw_rev[] = "1";
const uint8_t fw_rev[] = "1";
const uint8_t sw_rev[] = "1";
static bd_addr ble_address = { 0x00u, 0x00u, 0x00u, 0x00u, 0x00u, 0x00u };
static bool button_press = false;
static bool button_press_prev = false;
static int32_t acc_x = 0, acc_y = 0;
static sl_status_t sc = SL_STATUS_OK;
static void ble_initialize_gatt_db();
static void ble_start_advertising();
static void mouse_button_callback();
// Optionally connect a button for left click
#define MOUSE_BUTTON D1
LSM6DS3 myIMU(I2C_MODE, 0x6A);
void setup()
{
// Initialize report data
memset(&report, 0, sizeof(report));
// Enable the IMU power
pinMode(PD5, OUTPUT);
digitalWrite(PD5, HIGH);
delay(300);
pinMode(MOUSE_BUTTON, INPUT_PULLUP);
attachInterrupt(MOUSE_BUTTON, mouse_button_callback, CHANGE);
Serial.begin(115200);
Serial.println("XIAO MG24 BLE mouse");
myIMU.begin();
Serial.println("---");
Serial.println("IMU initialized");
}
void loop()
{
// Update 'left mouse button' bit
if (button_press) {
report.buttons |= LMB_PRESSED;
if (!button_press_prev) {
button_press_prev = true;
Serial.println("Button pressed");
}
} else {
button_press_prev = false;
report.buttons &= ~LMB_PRESSED;
}
// Change x and y for correct orientation of the boards
acc_y = (int32_t)(myIMU.readFloatAccelX() * 10.0f);
acc_x = (int32_t)(myIMU.readFloatAccelY() * 10.0f * -1.0f);
// In case the acceleration value would surpass the threshold value
// in positive or negative direction assign the threshold value
if (acc_x > IMU_ACC_X_THRESHOLD) {
report.delta_x = IMU_ACC_X_THRESHOLD;
} else if (acc_x < (-1 * IMU_ACC_X_THRESHOLD)) {
report.delta_x = (-1 * IMU_ACC_X_THRESHOLD);
} else {
report.delta_x = acc_x;
}
if (acc_y > IMU_ACC_Y_THRESHOLD) {
report.delta_y = IMU_ACC_Y_THRESHOLD;
} else if (acc_y < (-1 * IMU_ACC_Y_THRESHOLD)) {
report.delta_y = (-1 * IMU_ACC_Y_THRESHOLD);
} else {
report.delta_y = acc_y;
}
memcpy(report_array, &report, sizeof(report));
if (connection_handle != SL_BT_INVALID_CONNECTION_HANDLE && bonding_handle != SL_BT_INVALID_BONDING_HANDLE) {
// Indicate report data change with GATT notification
sc = sl_bt_gatt_server_notify_all(hid_report, sizeof(report_array), report_array);
if (sc != SL_STATUS_OK) {
Serial.print("sl_bt_gatt_server_notify_all() returned with error code 0x");
Serial.println(sc, HEX);
} else {
Serial.print("cursor [delta-X: ");
Serial.print(report.delta_x, DEC);
Serial.print(" delta-Y: ");
Serial.print(report.delta_y, DEC);
Serial.print(" ] LMB: ");
Serial.println(report.buttons, HEX);
}
}
}
/******************************************************************************
* Mouse button callback
*****************************************************************************/
void mouse_button_callback()
{
if (digitalRead(MOUSE_BUTTON) == LOW) {
button_press = true;
} else {
button_press = false;
}
}
/******************************************************************************
* Bluetooth stack event handler
* Called when an event happens on BLE the stack
*
* @param[in] evt Event coming from the Bluetooth stack
*****************************************************************************/
void sl_bt_on_event(sl_bt_msg_t* evt)
{
sl_status_t sc = SL_STATUS_OK;
uint8_t ble_address_type;
switch (SL_BT_MSG_ID(evt->header)) {
// -------------------------------
// This event indicates the device has started and the radio is ready
case sl_bt_evt_system_boot_id:
{
// Get BLE address and address type
sc = sl_bt_system_get_identity_address(&ble_address, &ble_address_type);
app_assert_status(sc);
// Print welcome message
Serial.begin(115200);
Serial.println();
Serial.println("BLE stack booted");
// Initialize the application specific GATT DB
ble_initialize_gatt_db();
// HID input devices requires mandatory secure level and bonding
sc = sl_bt_sm_configure(0, sl_bt_sm_io_capability_noinputnooutput);
app_assert_status(sc);
// Allow bonding
sc = sl_bt_sm_set_bondable_mode(1);
app_assert_status(sc);
ble_start_advertising();
}
break;
// -------------------------------
// This event indicates that a BLE connection has been opened
case sl_bt_evt_connection_opened_id:
{
// Store the connection handle which will be needed for sending indications
connection_handle = evt->data.evt_connection_opened.connection;
bonding_handle = evt->data.evt_connection_opened.bonding;
Serial.print("Connection opened - handle 0x");
Serial.println(connection_handle, HEX);
if (bonding_handle == SL_BT_INVALID_BONDING_HANDLE) {
Serial.println("Connection not bonded yet");
} else {
Serial.println("Connection bonded");
}
Serial.println("Increase security");
sc = sl_bt_sm_increase_security(evt->data.evt_connection_opened.connection);
app_assert_status(sc);
}
break;
// -------------------------------
// This event indicates that bonding was successful
case sl_bt_evt_sm_bonded_id:
{
Serial.print("Bonded - handle: 0x");
Serial.print(evt->data.evt_sm_bonded.connection, HEX);
bonding_handle = evt->data.evt_sm_bonded.bonding;
connection_handle = evt->data.evt_sm_bonded.connection;
Serial.print(" - security mode: 0x");
Serial.println(evt->data.evt_sm_bonded.security_mode, HEX);
}
break;
// -------------------------------
// This event indicates that a BLE connection has closed
case sl_bt_evt_connection_closed_id:
{
Serial.print("Connection closed - handle: 0x");
Serial.print(connection_handle, HEX);
Serial.print(" reason: 0x");
Serial.println(evt->data.evt_connection_closed.reason, HEX);
connection_handle = SL_BT_INVALID_CONNECTION_HANDLE;
bonding_handle = SL_BT_INVALID_BONDING_HANDLE;
sc = sl_bt_sm_delete_bondings();
Serial.println("Deleted bondings");
app_assert_status(sc);
ble_start_advertising();
}
break;
// -------------------------------
// This event indicates that the connection parameters have changed
case sl_bt_evt_connection_parameters_id:
{
Serial.print("Set connection parameters, security_mode: ");
Serial.println(evt->data.evt_connection_parameters.security_mode, HEX);
}
break;
// -------------------------------
// This event indicates that bonding has failed
case sl_bt_evt_sm_bonding_failed_id:
{
Serial.print("Bonding failed, reason: 0x");
Serial.println(evt->data.evt_sm_bonding_failed.reason, HEX);
Serial.println("Delete bondings.");
sc = sl_bt_sm_delete_bondings();
app_assert_status(sc);
Serial.println("Bondings deleted");
Serial.print("Close connection - handle: 0x");
Serial.println(evt->data.evt_sm_bonding_failed.connection, HEX);
}
break;
// -------------------------------
// Default event handler
default:
break;
}
}
/******************************************************************************
* Starts BLE advertisement
* Initializes advertising if it's called for the first time
*****************************************************************************/
static void ble_start_advertising()
{
static uint8_t advertising_set_handle = 0xff;
static bool init = true;
sl_status_t sc;
if (init) {
// Create an advertising set
sc = sl_bt_advertiser_create_set(&advertising_set_handle);
app_assert_status(sc);
// Set advertising interval to 100ms
sc = sl_bt_advertiser_set_timing(
advertising_set_handle,
160, // Minimum advertisement interval (milliseconds * 1.6)
160, // Maximum advertisement interval (milliseconds * 1.6)
0, // Advertisement duration
0); // Maximum number of advertisement events
app_assert_status(sc);
init = false;
}
// Generate data for advertising
sc = sl_bt_legacy_advertiser_generate_data(advertising_set_handle, sl_bt_advertiser_general_discoverable);
app_assert_status(sc);
// Start advertising and enable connections
sc = sl_bt_legacy_advertiser_start(advertising_set_handle, sl_bt_advertiser_connectable_scannable);
app_assert_status(sc);
Serial.print("Started advertising as '");
Serial.print(DEVICE_NAME);
Serial.print("' address: ");
// Print address in format 'FF:FF:FF:FF:FF:FF'
for (uint8_t i = (sizeof(bd_addr) - 1); i > 0; i--) {
Serial.print(ble_address.addr[i], HEX);
Serial.print(":");
}
Serial.println(ble_address.addr[0], HEX);
}
/******************************************************************************
* Initializes the GATT database
* Creates a new GATT session and adds certain services and characteristics
*****************************************************************************/
static void ble_initialize_gatt_db()
{
sl_status_t sc;
uint16_t gattdb_session_id;
uint16_t service;
uint16_t characteristic;
uint16_t descriptor;
// Create a new GATT database
sc = sl_bt_gattdb_new_session(&gattdb_session_id);
app_assert_status(sc);
// Generic access service
uint8_t generic_access_service_uuid[] = { 0x00, 0x18 };
sc = sl_bt_gattdb_add_service(gattdb_session_id,
sl_bt_gattdb_primary_service,
SL_BT_GATTDB_ADVERTISED_SERVICE,
2,
generic_access_service_uuid,
&service);
app_assert_status(sc);
// Device name characteristic
sl_bt_uuid_16_t device_name_uuid = { .data = { 0x00, 0x2A } };
sc = sl_bt_gattdb_add_uuid16_characteristic(gattdb_session_id,
service,
(SL_BT_GATTDB_CHARACTERISTIC_READ | SL_BT_GATTDB_CHARACTERISTIC_WRITE),
0,
0,
device_name_uuid,
sl_bt_gattdb_fixed_length_value,
strlen(DEVICE_NAME),
strlen(DEVICE_NAME),
(uint8_t *)DEVICE_NAME,
&characteristic);
app_assert_status(sc);
// Appearance characteristic
sl_bt_uuid_16_t appearence_uuid = { .data = { 0x01, 0x2A } };
const uint8_t appearance_value[] = { 0xC2, 0x03 };
sc = sl_bt_gattdb_add_uuid16_characteristic(gattdb_session_id,
service,
SL_BT_GATTDB_CHARACTERISTIC_READ,
0,
0,
appearence_uuid,
sl_bt_gattdb_fixed_length_value,
2,
sizeof(appearance_value),
appearance_value,
&characteristic);
app_assert_status(sc);
// Generic access service start
sc = sl_bt_gattdb_start_service(gattdb_session_id, service);
app_assert_status(sc);
// Battery service
const uint8_t battery_service_uuid[] = { 0x0F, 0x18 };
sc = sl_bt_gattdb_add_service(gattdb_session_id,
sl_bt_gattdb_primary_service,
0,
sizeof(battery_service_uuid),
battery_service_uuid,
&service);
app_assert_status(sc);
// Battery level characteristic
const sl_bt_uuid_16_t battery_level_uuid = { .data = { 0x19, 0x2A } };
const uint8_t battery_level_init_value = 100;
sc = sl_bt_gattdb_add_uuid16_characteristic(gattdb_session_id,
service,
SL_BT_GATTDB_CHARACTERISTIC_READ,
0,
0,
battery_level_uuid,
sl_bt_gattdb_fixed_length_value,
sizeof(battery_level_init_value),
sizeof(battery_level_init_value),
&battery_level_init_value,
&characteristic);
app_assert_status(sc);
// Characteristic presentation format descriptor
const sl_bt_uuid_16_t chara_presentation_format_descriptor_uuid = { .data = { 0x04, 0x29 } };
const uint8_t chara_presentation_format_value[] = { 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00 };
sc = sl_bt_gattdb_add_uuid16_descriptor(gattdb_session_id,
characteristic,
SL_BT_GATTDB_DESCRIPTOR_READ,
0,
chara_presentation_format_descriptor_uuid,
sl_bt_gattdb_fixed_length_value,
sizeof(chara_presentation_format_value),
sizeof(chara_presentation_format_value),
chara_presentation_format_value,
&descriptor);
app_assert_status(sc);
// Client characteristic configuration descriptor
const sl_bt_uuid_16_t client_configuration_descriptor_uuid = { .data = { 0x02, 0x29 } };
const uint8_t client_configuration_value[] = { 0x00, 0x00 };
sc = sl_bt_gattdb_add_uuid16_descriptor(gattdb_session_id,
characteristic,
(SL_BT_GATTDB_DESCRIPTOR_READ | SL_BT_GATTDB_DESCRIPTOR_WRITE),
0,
client_configuration_descriptor_uuid,
sl_bt_gattdb_fixed_length_value,
sizeof(client_configuration_value),
sizeof(client_configuration_value),
client_configuration_value,
&descriptor);
app_assert_status(sc);
// Battery service start
sc = sl_bt_gattdb_start_service(gattdb_session_id, service);
app_assert_status(sc);
// Device information service
const uint8_t device_info_service_uuid[] = { 0x0A, 0x18 };
sc = sl_bt_gattdb_add_service(gattdb_session_id,
sl_bt_gattdb_primary_service,
0,
sizeof(device_info_service_uuid),
device_info_service_uuid,
&service);
app_assert_status(sc);
// Manufacturer name string characteristic
const sl_bt_uuid_16_t manufacturer_uuid = { .data = { 0x29, 0x2A } };
sc = sl_bt_gattdb_add_uuid16_characteristic(gattdb_session_id,
service,
SL_BT_GATTDB_CHARACTERISTIC_READ,
0,
0,
manufacturer_uuid,
sl_bt_gattdb_fixed_length_value,
(sizeof(manufacturer) - 1),
(sizeof(manufacturer) - 1),
manufacturer,
&characteristic);
app_assert_status(sc);
// Model number string characteristic
const sl_bt_uuid_16_t model_no_uuid = { .data = { 0x24, 0x2A } };
sc = sl_bt_gattdb_add_uuid16_characteristic(gattdb_session_id,
service,
SL_BT_GATTDB_CHARACTERISTIC_READ,
0,
0,
model_no_uuid,
sl_bt_gattdb_fixed_length_value,
(sizeof(model_no) - 1),
(sizeof(model_no) - 1),
model_no,
&characteristic);
app_assert_status(sc);
// Serial number string characteristic
const sl_bt_uuid_16_t serial_no_uuid = { .data = { 0x25, 0x2A } };
sc = sl_bt_gattdb_add_uuid16_characteristic(gattdb_session_id,
service,
SL_BT_GATTDB_CHARACTERISTIC_READ,
0,
0,
serial_no_uuid,
sl_bt_gattdb_fixed_length_value,
(sizeof(serial_no) - 1),
(sizeof(serial_no) - 1),
serial_no,
&characteristic);
app_assert_status(sc);
// Hardware revision string characteristic
const sl_bt_uuid_16_t hw_rev_uuid = { .data = { 0x27, 0x2A } };
sc = sl_bt_gattdb_add_uuid16_characteristic(gattdb_session_id,
service,
SL_BT_GATTDB_CHARACTERISTIC_READ,
0,
0,
hw_rev_uuid,
sl_bt_gattdb_fixed_length_value,
(sizeof(hw_rev) - 1),
(sizeof(hw_rev) - 1),
hw_rev,
&characteristic);
app_assert_status(sc);
// Firmware revision string characteristic
const sl_bt_uuid_16_t fw_rev_uuid = { .data = { 0x26, 0x2A } };
sc = sl_bt_gattdb_add_uuid16_characteristic(gattdb_session_id,
service,
SL_BT_GATTDB_CHARACTERISTIC_READ,
0,
0,
fw_rev_uuid,
sl_bt_gattdb_fixed_length_value,
(sizeof(fw_rev) - 1),
(sizeof(fw_rev) - 1),
fw_rev,
&characteristic);
app_assert_status(sc);
// Software revision string characteristic
const sl_bt_uuid_16_t sw_rev_uuid = { .data = { 0x28, 0x2A } };
sc = sl_bt_gattdb_add_uuid16_characteristic(gattdb_session_id,
service,
SL_BT_GATTDB_CHARACTERISTIC_READ,
0,
0,
sw_rev_uuid,
sl_bt_gattdb_fixed_length_value,
(sizeof(sw_rev) - 1),
(sizeof(sw_rev) - 1),
sw_rev,
&characteristic);
app_assert_status(sc);
// System ID characteristic
const sl_bt_uuid_16_t sys_id_uuid = { .data = { 0x23, 0x2A } };
const uint8_t sys_id_initial_value[] = { 0x12, 0x34, 0x56, 0xFF, 0xFE, 0x9A, 0xBC, 0xDE };
sc = sl_bt_gattdb_add_uuid16_characteristic(gattdb_session_id,
service,
SL_BT_GATTDB_CHARACTERISTIC_READ,
0,
0,
sys_id_uuid,
sl_bt_gattdb_fixed_length_value,
sizeof(sys_id_initial_value),
sizeof(sys_id_initial_value),
sys_id_initial_value,
&characteristic);
app_assert_status(sc);
// PnP ID characteristic
const sl_bt_uuid_16_t pnp_id_uuid = { .data = { 0x50, 0x2A } };
const uint8_t pnp_id_initial_value[] = { 0x02, 0x10, 0xC4, 0x00, 0x01, 0x00, 0x01 };
sc = sl_bt_gattdb_add_uuid16_characteristic(gattdb_session_id,
service,
SL_BT_GATTDB_CHARACTERISTIC_READ,
0,
0,
pnp_id_uuid,
sl_bt_gattdb_fixed_length_value,
sizeof(pnp_id_initial_value),
sizeof(pnp_id_initial_value),
pnp_id_initial_value,
&characteristic);
app_assert_status(sc);
// Device information service start
sc = sl_bt_gattdb_start_service(gattdb_session_id, service);
app_assert_status(sc);
// HID service
uint8_t hid_service_uuid[] = { 0x12, 0x18 };
sc = sl_bt_gattdb_add_service(gattdb_session_id,
sl_bt_gattdb_primary_service,
SL_BT_GATTDB_ADVERTISED_SERVICE,
2,
hid_service_uuid,
&service);
app_assert_status(sc);
// Protocol mode characteristic
sl_bt_uuid_16_t hid_protocol_mode_uuid = { .data = { 0x4E, 0x2A } };
const uint8_t hid_protocol_mode_init_value[] = { 1 };
sc = sl_bt_gattdb_add_uuid16_characteristic(gattdb_session_id,
service,
(SL_BT_GATTDB_CHARACTERISTIC_READ | SL_BT_GATTDB_CHARACTERISTIC_WRITE_NO_RESPONSE),
0,
0,
hid_protocol_mode_uuid,
sl_bt_gattdb_fixed_length_value,
sizeof(hid_protocol_mode_init_value),
sizeof(hid_protocol_mode_init_value),
hid_protocol_mode_init_value,
&characteristic);
app_assert_status(sc);
// HID report characteristic
const sl_bt_uuid_16_t hid_report_uuid = { .data = { 0x4D, 0x2A } };
const uint8_t hid_report_init_value[] = { 0x00, 0x00, 0x00 };
sc = sl_bt_gattdb_add_uuid16_characteristic(gattdb_session_id,
service,
(SL_BT_GATTDB_CHARACTERISTIC_READ | SL_BT_GATTDB_CHARACTERISTIC_WRITE | SL_BT_GATTDB_CHARACTERISTIC_NOTIFY),
0,
0,
hid_report_uuid,
sl_bt_gattdb_fixed_length_value,
sizeof(hid_report_init_value),
sizeof(hid_report_init_value),
hid_report_init_value,
&characteristic);
app_assert_status(sc);
hid_report = characteristic;
// HID report reference descriptor
const sl_bt_uuid_16_t hid_report_reference_desc_uuid = { .data = { 0x08, 0x29 } };
const uint8_t hid_report_reference_desc_init_val[] = { 0x00, 0x01 };
sc = sl_bt_gattdb_add_uuid16_descriptor(gattdb_session_id,
characteristic,
SL_BT_GATTDB_DESCRIPTOR_READ,
SL_BT_GATTDB_ENCRYPTED_READ,
hid_report_reference_desc_uuid,
sl_bt_gattdb_fixed_length_value,
sizeof(hid_report_reference_desc_init_val),
sizeof(hid_report_reference_desc_init_val),
hid_report_reference_desc_init_val,
&descriptor);
app_assert_status(sc);
// HID report map characteristic
const sl_bt_uuid_16_t hid_report_map_uuid = { .data = { 0x4B, 0x2A } };
const uint8_t hid_report_map_init_value[] = { 0x05, 0x01, // Usage page (Generic Desktop)
0x09, 0x02, // Usage (Mouse)
0xA1, 0x01, // Collection (Application)
0x09, 0x01, // UsageId (Pointer)
0xA1, 0x00, // Collection (Physical)
0x09, 0x30, // UsageId (x)
0x09, 0x31, // UsageId (y)
0x15, 0x80, // LogicalMinimum(-128)
0x25, 0x7F, // LogicalMaximum(127)
0x95, 0x02, // ReportCount(2)
0x75, 0x08, // ReportSize(8)
0x81, 0x06, // Input(Data, Variable, Relative, NoWrap, Linear, PreferredState, NoNullPosition, BitField)
0x05, 0x09, // UsagePage(Button)
0x19, 0x01, // UsageIdMin(Button 1)
0x29, 0x03, // UsageIdMax(Button 3)
0x15, 0x00, // LogicalMinimum(0)
0x25, 0x01, // LogicalMaximum(1)
0x95, 0x03, // ReportCount(3)
0x75, 0x01, // ReportSize(1)
0x81, 0x02, // Input(Data, Variable, Absolute, NoWrap, Linear, PreferredState, NoNullPosition, BitField)
0x95, 0x01, // ReportCount(1)
0x75, 0x05, // ReportSize(5)
0x81, 0x03, // Input(Constant, Variable, Absolute, NoWrap, Linear, PreferredState, NoNullPosition, BitField)
0xC0, // EndCollection()
0xC0 }; // EndCollection()
sc = sl_bt_gattdb_add_uuid16_characteristic(gattdb_session_id,
service,
SL_BT_GATTDB_CHARACTERISTIC_READ,
SL_BT_GATTDB_ENCRYPTED_READ,
0,
hid_report_map_uuid,
sl_bt_gattdb_fixed_length_value,
sizeof(hid_report_map_init_value),
sizeof(hid_report_map_init_value),
hid_report_map_init_value,
&characteristic);
app_assert_status(sc);
// HID external report reference descriptor
const sl_bt_uuid_16_t hid_external_report_reference_descriptor_uuid = { .data = { 0x07, 0x29 } };
const uint8_t hid_external_report_reference_value[] = { 0x00, 0x00 };
sc = sl_bt_gattdb_add_uuid16_descriptor(gattdb_session_id,
characteristic,
SL_BT_GATTDB_DESCRIPTOR_READ,
0,
hid_external_report_reference_descriptor_uuid,
sl_bt_gattdb_fixed_length_value,
sizeof(hid_external_report_reference_value),
sizeof(hid_external_report_reference_value),
hid_external_report_reference_value,
&descriptor);
app_assert_status(sc);
// HID information characteristic
const sl_bt_uuid_16_t hid_info_uuid = { .data = { 0x4A, 0x2A } };
const uint8_t hid_info_init_value[] = { 0x01, 0x11, 0x00, 0x02 };
sc = sl_bt_gattdb_add_uuid16_characteristic(gattdb_session_id,
service,
SL_BT_GATTDB_CHARACTERISTIC_READ,
0,
0,
hid_info_uuid,
sl_bt_gattdb_fixed_length_value,
sizeof(hid_info_init_value),
sizeof(hid_info_init_value),
hid_info_init_value,
&characteristic);
app_assert_status(sc);
// HID control point characteristic
const sl_bt_uuid_16_t hid_control_point_uuid = { .data = { 0x4C, 0x2A } };
const uint8_t hid_control_point_init_value[] = { 0x00 };
sc = sl_bt_gattdb_add_uuid16_characteristic(gattdb_session_id,
service,
SL_BT_GATTDB_CHARACTERISTIC_WRITE_NO_RESPONSE,
0,
0,
hid_control_point_uuid,
sl_bt_gattdb_fixed_length_value,
sizeof(hid_control_point_init_value),
sizeof(hid_control_point_init_value),
hid_control_point_init_value,
&characteristic);
app_assert_status(sc);
// HID service start
sc = sl_bt_gattdb_start_service(gattdb_session_id, service);
app_assert_status(sc);
// Commit the GATT DB changes
sc = sl_bt_gattdb_commit(gattdb_session_id);
app_assert_status(sc);
}
#ifndef BLE_STACK_SILABS
#error "This example is only compatible with the Silicon Labs BLE stack. Please select 'BLE (Silabs)' in 'Tools > Protocol stack'."
#endif
结果图表
当我们按下扩展板上的按钮时,可以观察到鼠标事件被触发了!
XIAO MG24 Sense 麦克风(Seeed Studio 演示)
内置传感器概述
麦克风传感器如 MSM381ACT001 是一款 MEMS(微机电系统)麦克风,设计用于以高灵敏度和低噪声捕获音频信号。具体来说,MSM381ACT001 具有以下特性:
麦克风功能:
- 捕获声波并将其转换为电信号,能够在各种环境中检测音频输入。
- 具有宽频响范围,通常为 20 Hz 到 20 kHz,适用于各种音频应用,包括语音识别和音乐播放。
主要特性
- 高灵敏度:能够检测微弱声音,非常适合需要精确音频捕获的应用。
- 低噪声:设计提供高信噪比(SNR),即使在嘈杂环境中也能确保清晰的音频输出。
- 紧凑尺寸:MEMS 技术允许小型化设计,便于集成到智能手机和可穿戴设备等便携式设备中。
- 数字输出:提供数字信号输出选项(例如 I2S),简化与数字信号处理器(DSP)和微控制器的接口。
软件准备
点击 github 下载链接来驱动麦克风传感器。
目前我们需要手动修改替换文件,后续直接下载库即可使用,请等待我们的 wiki 更新。
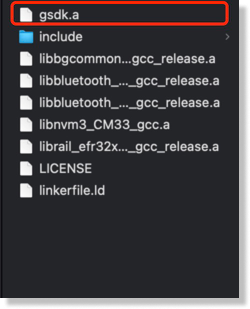
- [替换文件] gsdk.a
更改文件路径
- /Users/yourname/Library/Arduino15/packages/SiliconLabs/hardware/silabs/2.2.0/variants/xiao_mg24/ble_silabs/
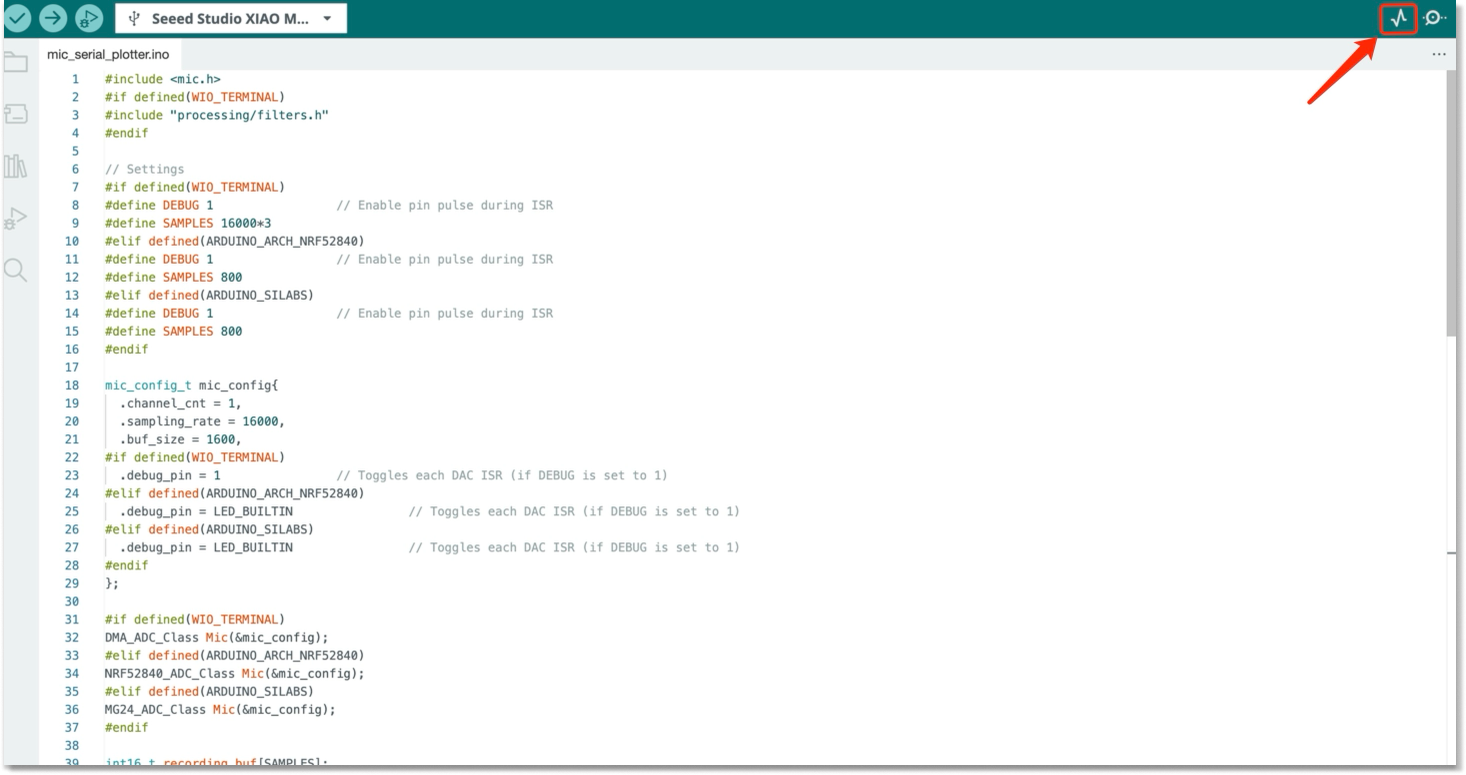
代码实现
#include <mic.h>
#if defined(WIO_TERMINAL)
#include "processing/filters.h"
#endif
// Settings
#if defined(WIO_TERMINAL)
#define DEBUG 1 // Enable pin pulse during ISR
#define SAMPLES 16000*3
#elif defined(ARDUINO_ARCH_NRF52840)
#define DEBUG 1 // Enable pin pulse during ISR
#define SAMPLES 800
#elif defined(ARDUINO_SILABS)
#define DEBUG 1 // Enable pin pulse during ISR
#define SAMPLES 800
#endif
mic_config_t mic_config{
.channel_cnt = 1,
.sampling_rate = 16000,
.buf_size = 1600,
#if defined(WIO_TERMINAL)
.debug_pin = 1 // Toggles each DAC ISR (if DEBUG is set to 1)
#elif defined(ARDUINO_ARCH_NRF52840)
.debug_pin = LED_BUILTIN // Toggles each DAC ISR (if DEBUG is set to 1)
#elif defined(ARDUINO_SILABS)
.debug_pin = LED_BUILTIN // Toggles each DAC ISR (if DEBUG is set to 1)
#endif
};
#if defined(WIO_TERMINAL)
DMA_ADC_Class Mic(&mic_config);
#elif defined(ARDUINO_ARCH_NRF52840)
NRF52840_ADC_Class Mic(&mic_config);
#elif defined(ARDUINO_SILABS)
MG24_ADC_Class Mic(&mic_config);
#endif
int16_t recording_buf[SAMPLES];
volatile uint8_t recording = 0;
volatile static bool record_ready = false;
#if defined(WIO_TERMINAL)
FilterBuHp filter;
#endif
void setup() {
Serial.begin(115200);
while (!Serial) {delay(10);}
#if defined(WIO_TERMINAL)
pinMode(WIO_KEY_A, INPUT_PULLUP);
#endif
Mic.set_callback(audio_rec_callback);
if (!Mic.begin()) {
Serial.println("Mic initialization failed");
while (1);
}
Serial.println("Mic initialization done.");
}
void loop() {
#if defined(WIO_TERMINAL)
if (digitalRead(WIO_KEY_A) == LOW && !recording) {
Serial.println("Starting sampling");
recording = 1;
record_ready = false;
}
#endif
#if defined(WIO_TERMINAL)
if (!recording && record_ready)
#elif defined(ARDUINO_ARCH_NRF52840) || defined(ARDUINO_SILABS)
if (record_ready)
#endif
{
Serial.println("Finished sampling");
for (int i = 0; i < SAMPLES; i++) {
//int16_t sample = filter.step(recording_buf[i]);
int16_t sample = recording_buf[i];
Serial.println(sample);
}
record_ready = false;
}
}
static void audio_rec_callback(uint16_t *buf, uint32_t buf_len) {
static uint32_t idx = 0;
// Copy samples from DMA buffer to inference buffer
#if defined(WIO_TERMINAL)
if (recording)
#endif
{
for (uint32_t i = 0; i < buf_len; i++) {
// Convert 12-bit unsigned ADC value to 16-bit PCM (signed) audio value
#if defined(WIO_TERMINAL)
recording_buf[idx++] = filter.step((int16_t)(buf[i] - 1024) * 16);
//recording_buf[idx++] = (int16_t)(buf[i] - 1024) * 16;
#elif defined(ARDUINO_ARCH_NRF52840) || defined(ARDUINO_SILABS)
recording_buf[idx++] = buf[i];
#endif
if (idx >= SAMPLES){
idx = 0;
recording = 0;
record_ready = true;
break;
}
}
}
}
Function Overview
Microphone Configuration
mic_config_t mic_config{
.channel_cnt = 1,
.sampling_rate = 16000,
.buf_size = 1600,
#if defined(WIO_TERMINAL)
.debug_pin = 1
#elif defined(ARDUINO_ARCH_NRF52840)
.debug_pin = LED_BUILTIN
#elif defined(ARDUINO_SILABS)
.debug_pin = LED_BUILTIN
#endif
};
- mic_config_t: 定义麦克风配置结构体。
- channel_cnt: 设置为 1 表示单声道。
- sampling_rate: 设置为 16000 Hz 作为采样频率。
- buf_size: 设置为 1600 作为缓冲区大小。
- debug_pin: 根据平台设置调试引脚,用于调试期间的信号指示。
麦克风实例化
#if defined(WIO_TERMINAL)
DMA_ADC_Class Mic(&mic_config);
#elif defined(ARDUINO_ARCH_NRF52840)
NRF52840_ADC_Class Mic(&mic_config);
#elif defined(ARDUINO_SILABS)
MG24_ADC_Class Mic(&mic_config);
#endif
- 条件编译:为不同平台创建适当的麦克风类实例,使用之前定义的配置。
录音缓冲区和标志
int16_t recording_buf[SAMPLES];
volatile uint8_t recording = 0;
volatile static bool record_ready = false;
- recording_buf: 定义一个 SAMPLES 数组来存储录音样本。
- recording: 一个 volatile 变量,标记当前是否正在录音,以防止编译器优化。
- record_ready: 一个 volatile 静态变量,指示录音是否完成并准备好进行进一步处理。
滤波器示例(适用于 WIO Terminal)
#if defined(WIO_TERMINAL)
FilterBuHp filter;
#endif
- 如果在 WIO Terminal 上,创建一个高通滤波器实例用于滤波处理。
setup
void setup() {
Serial.begin(115200);
while (!Serial) {delay(10);}
#if defined(WIO_TERMINAL)
pinMode(WIO_KEY_A, INPUT_PULLUP);
#endif
Mic.set_callback(audio_rec_callback);
if (!Mic.begin()) {
Serial.println("Mic initialization failed");
while (1);
}
Serial.println("Mic initialization done.");
}
-
初始化串口:以115200波特率启动串行通信并等待串口准备就绪。
-
设置引脚模式:在WIO Terminal上,将按键引脚设置为输入上拉模式。
-
设置回调函数:调用Mic.set_callback(audio_rec_callback)来指定录制音频时的回调函数。
-
初始化麦克风:调用Mic.begin(),如果初始化失败,打印错误消息并进入死循环。
loop
void loop() {
#if defined(WIO_TERMINAL)
if (digitalRead(WIO_KEY_A) == LOW && !recording) {
Serial.println("Starting sampling");
recording = 1;
record_ready = false;
}
#endif
#if defined(WIO_TERMINAL)
if (!recording && record_ready)
#elif defined(ARDUINO_ARCH_NRF52840) || defined(ARDUINO_SILABS)
if (record_ready)
#endif
{
Serial.println("Finished sampling");
for (int i = 0; i < SAMPLES; i++) {
int16_t sample = recording_buf[i];
Serial.println(sample);
}
record_ready = false;
}
}
- 检测按键:在 WIO Terminal 上,当检测到按键被按下且未在录音时,开始录音。
- 完成采样:如果未在录音且 record_ready 设置为 true,则打印"Finished sampling"。
- 遍历录音缓冲区并打印每个采样值。
音频录音回调函数
static void audio_rec_callback(uint16_t *buf, uint32_t buf_len) {
static uint32_t idx = 0;
#if defined(WIO_TERMINAL)
if (recording)
#endif
{
for (uint32_t i = 0; i < buf_len; i++) {
#if defined(WIO_TERMINAL)
recording_buf[idx++] = filter.step((int16_t)(buf[i] - 1024) * 16);
#elif defined(ARDUINO_ARCH_NRF52840) || defined(ARDUINO_SILABS)
recording_buf[idx++] = buf[i];
#endif
if (idx >= SAMPLES){
idx = 0;
recording = 0;
record_ready = true;
break;
}
}
}
}
- 回调函数:在音频录制期间调用,负责将样本从 DMA 缓冲区复制到录制缓冲区。
- 条件编译:如果在 WIO Terminal 上,使用滤波器处理输入。
- 将 12 位无符号 ADC 值转换为 16 位 PCM(有符号)音频值。
- 样本填充:将样本复制到 recording_buf 中并更新索引 idx。
- 完成录制:如果填充的样本数量达到 SAMPLES,重置索引,标记录制结束并将 record_ready 设置为 true。
结果图表
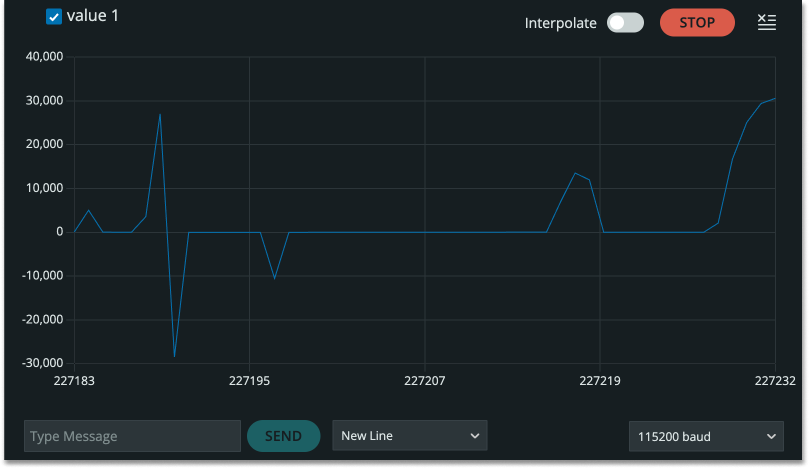
这是识别到的声音的波形,当你吹气时,可以清楚地看到波形振荡幅度变大。
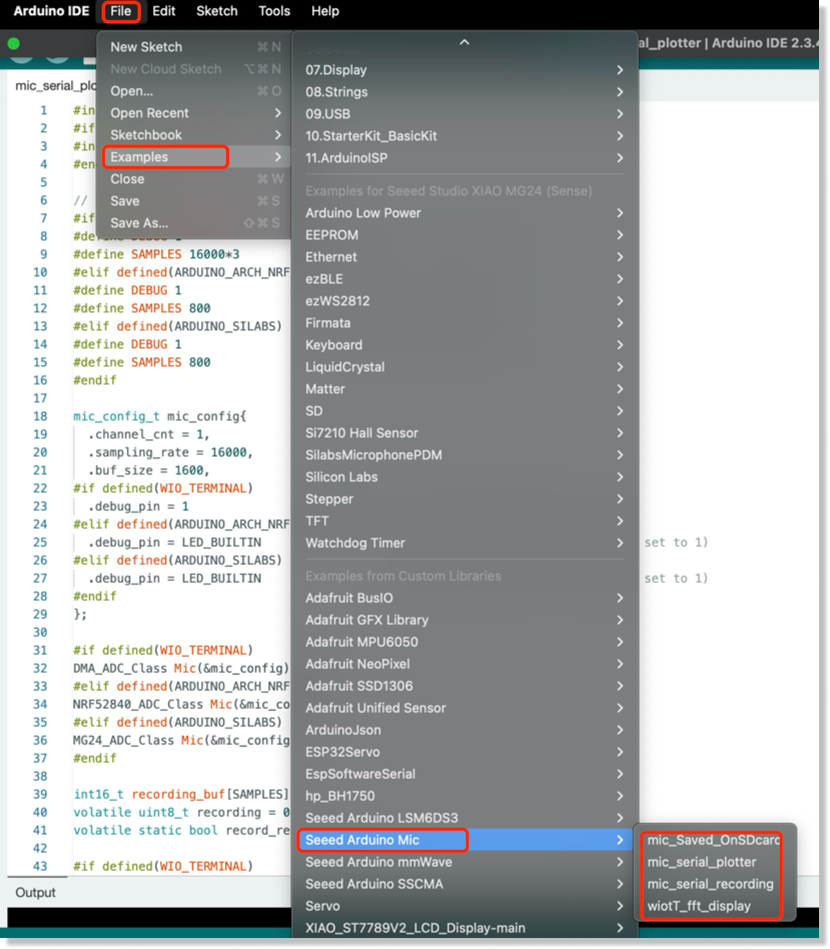
更多内容
如果你想要更多示例代码,请点击:-> "Example -> Seeed Arduino Mic"
XIAO MG24 Sense 麦克风(Silicon Labs 演示)
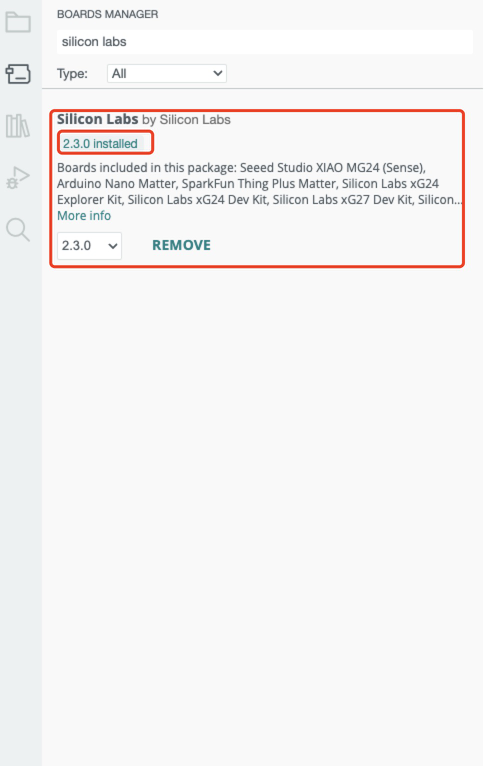
我们需要下载最新的板载包(2.3.0)才能在示例中找到最新的官方代码
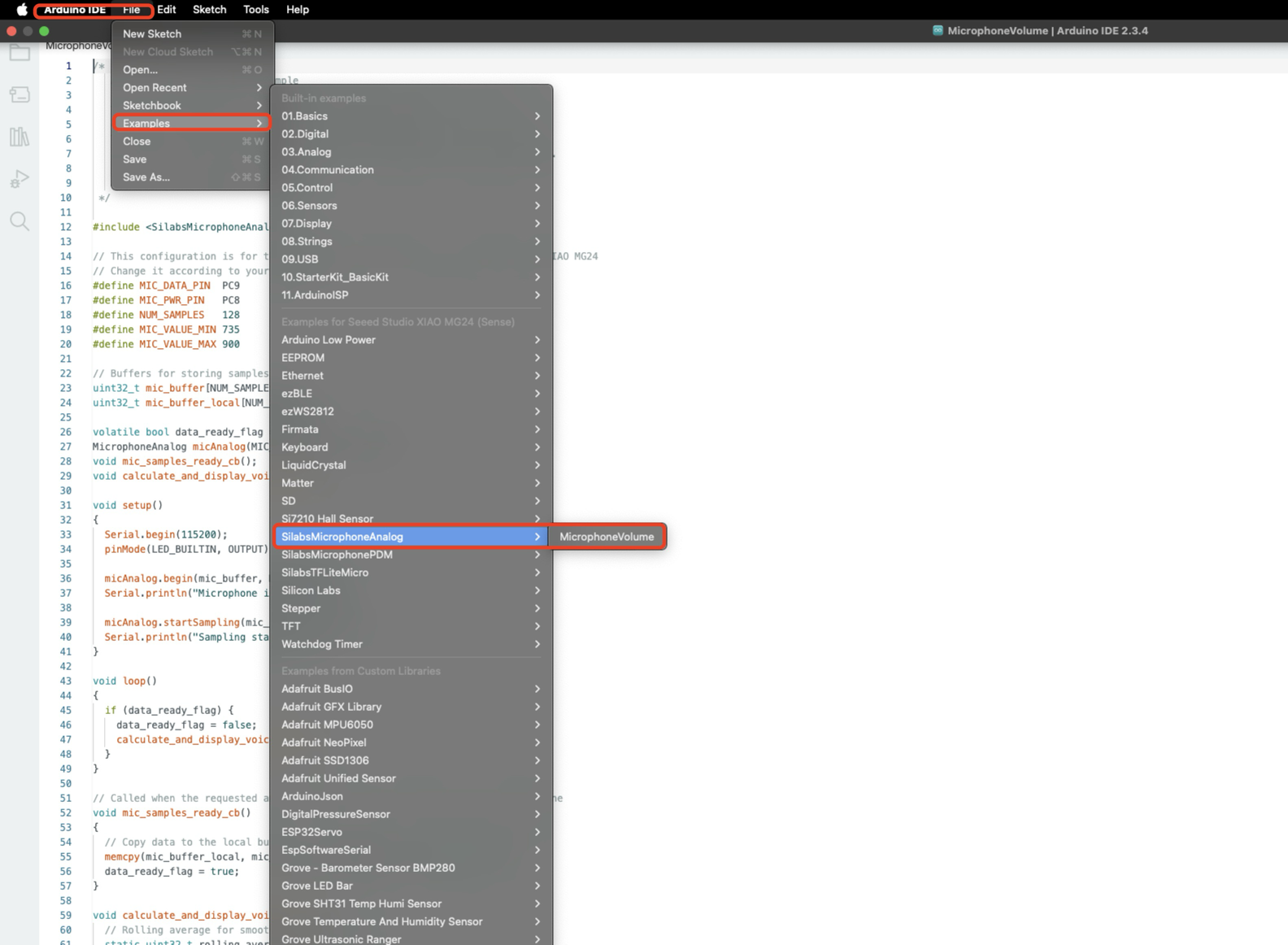
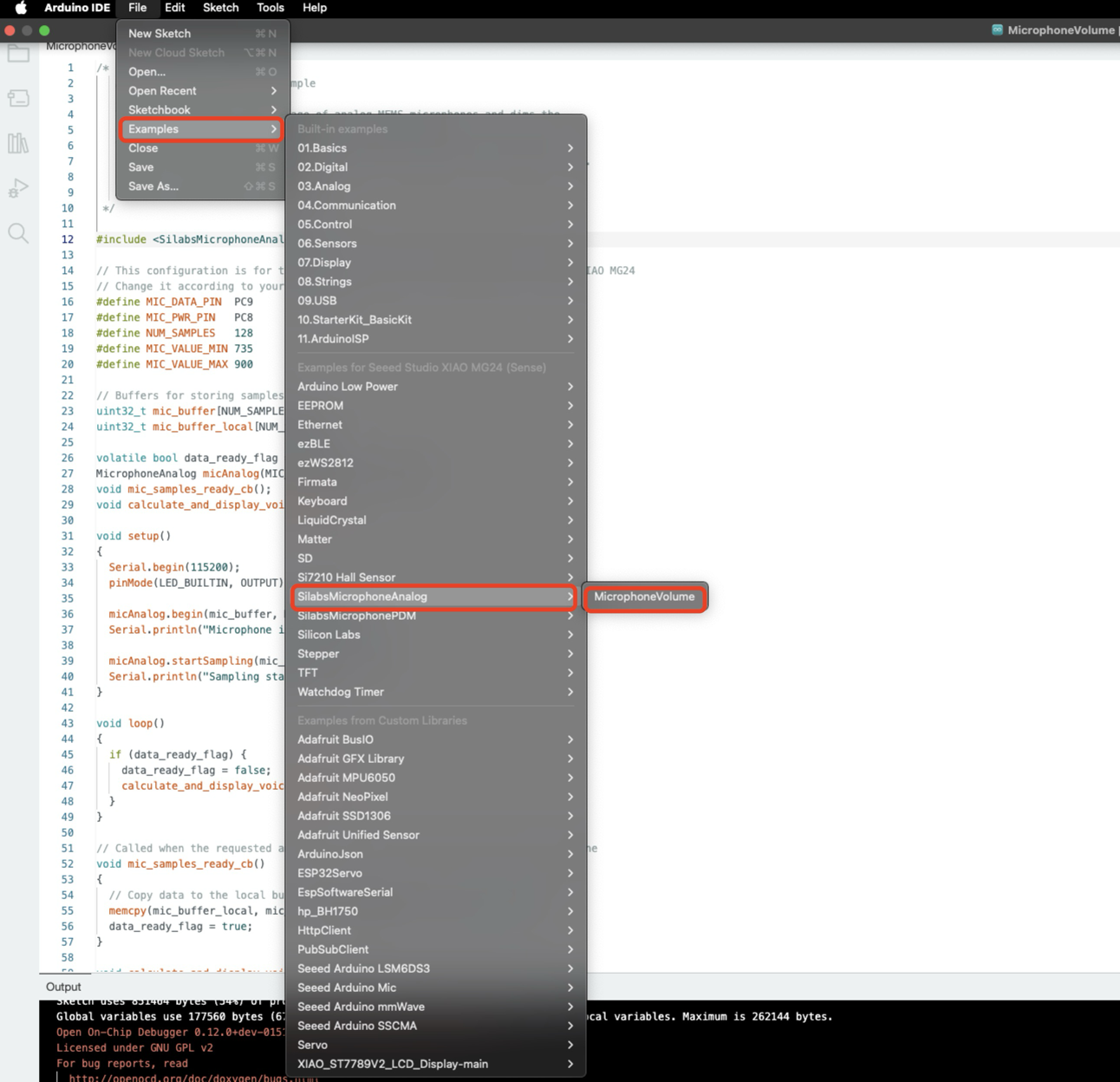
软件准备
代码实现
/*
Analog microphone volume example
The example showcases the usage of analog MEMS microphones and dims the
on-board LED based on the microphone's input volume.
This example is compatible with all Silicon Labs Arduino boards, however
it requires an analog microphone on-board or connected to the specified pin.
Author: Áron Gyapjas (Silicon Labs)
*/
#include <SilabsMicrophoneAnalog.h>
// This configuration is for the MSM381ACT001 microphone on the Seeed Studio XIAO MG24
// Change it according to your hardware
#define MIC_DATA_PIN PC9
#define MIC_PWR_PIN PC8
#define NUM_SAMPLES 128
#define MIC_VALUE_MIN 735
#define MIC_VALUE_MAX 900
// Buffers for storing samples
uint32_t mic_buffer[NUM_SAMPLES];
uint32_t mic_buffer_local[NUM_SAMPLES];
volatile bool data_ready_flag = false;
MicrophoneAnalog micAnalog(MIC_DATA_PIN, MIC_PWR_PIN);
void mic_samples_ready_cb();
void calculate_and_display_voice_level();
void setup()
{
Serial.begin(115200);
pinMode(LED_BUILTIN, OUTPUT);
micAnalog.begin(mic_buffer, NUM_SAMPLES);
Serial.println("Microphone initialized...");
micAnalog.startSampling(mic_samples_ready_cb);
Serial.println("Sampling started...");
}
void loop()
{
if (data_ready_flag) {
data_ready_flag = false;
calculate_and_display_voice_level();
}
}
// Called when the requested amount of samples are available from the microphone
void mic_samples_ready_cb()
{
// Copy data to the local buffer in order to prevent it from overwriting
memcpy(mic_buffer_local, mic_buffer, NUM_SAMPLES * sizeof(uint32_t));
data_ready_flag = true;
}
void calculate_and_display_voice_level() {
// Rolling average for smoothing the voice level
static uint32_t rolling_average = 0u;
// Stop sampling in order to prevent overwriting the current data
micAnalog.stopSampling();
// Get the average of the sampled values
uint32_t voice_level = (uint32_t)micAnalog.getAverage(mic_buffer_local, NUM_SAMPLES);
// Adjust the voice level relative to minimum/maximum of the microphone's output
voice_level = constrain(voice_level, MIC_VALUE_MIN, MIC_VALUE_MAX);
// Calculate the rolling average
rolling_average = (voice_level + rolling_average) / 2;
// Map the current average level to brightness
int brightness = map(rolling_average, MIC_VALUE_MIN, MIC_VALUE_MAX, 0, 255);
if (LED_BUILTIN_ACTIVE == LOW) {
analogWrite(LED_BUILTIN, 255 - brightness);
} else {
analogWrite(LED_BUILTIN, brightness);
}
// Print the average voice level (you can use the Serial Plotter to view this value on a graph)
Serial.println(rolling_average);
// Restart sampling
micAnalog.startSampling(mic_samples_ready_cb);
}
Function Overview
Header file introduction
#include <SilabsMicrophoneAnalog.h>
- 包含
SilabsMicrophoneAnalog.h头文件,该文件包含使用模拟麦克风所需的库函数和定义。
硬件配置
#define MIC_DATA_PIN PC9
#define MIC_PWR_PIN PC8
#define NUM_SAMPLES 128
#define MIC_VALUE_MIN 735
#define MIC_VALUE_MAX 900
-
MIC_DATA_PIN: 定义麦克风数据引脚为PC9。 -
MIC_PWR_PIN: 定义麦克风电源引脚为PC8。 -
NUM_SAMPLES: 定义每次采样的样本数为 128。 -
MIC_VALUE_MIN和MIC_VALUE_MAX: 定义麦克风输出的最小值和最大值范围。
缓冲区定义
uint32_t mic_buffer[NUM_SAMPLES];
uint32_t mic_buffer_local[NUM_SAMPLES];
-
mic_buffer:用于存储从麦克风收集的原始采样数据。 -
mic_buffer_local:用于临时存储采样数据以防止覆盖。
标志和对象定义
volatile bool data_ready_flag = false;
MicrophoneAnalog micAnalog(MIC_DATA_PIN, MIC_PWR_PIN);
-
data_ready_flag:用于指示新采样数据是否准备就绪的标志。 -
micAnalog:创建一个 MicrophoneAnalog 对象来控制麦克风。
回调函数声明
void mic_samples_ready_cb();
void calculate_and_display_voice_level();
-
mic_samples_ready_cb(): 采样完成时调用的回调函数。 -
calculate_and_display_voice_level(): 计算音量并控制LED亮度的函数。
setup() 函数
void setup()
{
Serial.begin(115200);
pinMode(LED_BUILTIN, OUTPUT);
micAnalog.begin(mic_buffer, NUM_SAMPLES);
Serial.println("Microphone initialized...");
micAnalog.startSampling(mic_samples_ready_cb);
Serial.println("Sampling started...");
}
-
以115200的波特率初始化串行通信。
-
将板载LED引脚设置为输出模式。
-
初始化麦克风并指定采样缓冲区。
-
开始采样并设置采样完成时的回调函数。
loop()函数
void loop()
{
if (data_ready_flag) {
data_ready_flag = false;
calculate_and_display_voice_level();
}
}
-
检查
data_ready_flag是否为true,表示新数据已准备就绪。 -
如果有新数据可用,调用
calculate_and_display_voice_level()函数来处理数据。
void mic_samples_ready_cb()
{
memcpy(mic_buffer_local, mic_buffer, NUM_SAMPLES * sizeof(uint32_t));
data_ready_flag = true;
}
将样本数据从 mic_buffer 复制到 mic_buffer_local 以防止覆盖。
将 data_ready_flag 设置为 true 以指示新数据已准备就绪。
void calculate_and_display_voice_level() {
static uint32_t rolling_average = 0u;
micAnalog.stopSampling();
uint32_t voice_level = (uint32_t)micAnalog.getAverage(mic_buffer_local, NUM_SAMPLES);
voice_level = constrain(voice_level, MIC_VALUE_MIN, MIC_VALUE_MAX);
rolling_average = (voice_level + rolling_average) / 2;
int brightness = map(rolling_average, MIC_VALUE_MIN, MIC_VALUE_MAX, 0, 255);
if (LED_BUILTIN_ACTIVE == LOW) {
analogWrite(LED_BUILTIN, 255 - brightness);
} else {
analogWrite(LED_BUILTIN, brightness);
}
Serial.println(rolling_average);
micAnalog.startSampling(mic_samples_ready_cb);
}
-
停止采样以防止数据覆盖。
-
计算采样数据的平均值并将其约束在
MIC_VALUE_MIN和MIC_VALUE_MAX之间。 -
计算滚动平均值以平滑音量变化。
-
将滚动平均值映射到LED亮度范围(0到255)并调整LED亮度。
-
通过串口输出滚动平均值以观察音量变化。
-
重新开始采样以收集新的音频数据。
结果图表
当我们对着麦克风吹气时,可以看到顶部的LED会随着声音变亮和变暗。
更多内容
如果您想要更多示例代码,请点击:-> "Example -> SilabsMicrophoneAnalog -> MicrophoneVolume"
资源
适用于 Seeed Studio XIAO MG24 Sense
技术支持与产品讨论
感谢您选择我们的产品!我们在这里为您提供不同的支持,以确保您使用我们产品的体验尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。