Seeed Studio XIAO nRF54L15 Sense BLE 使用指南
以下示例代码专为 PlatformIO 设计,但也兼容 nRF Connect SDK。
基于 VS Code,如果您想在 nRF Connect SDK 上使用以下案例,请参考提供的连接,添加 app.overlay 文件并修改 prj.conf 中的内容
BLE 观察者
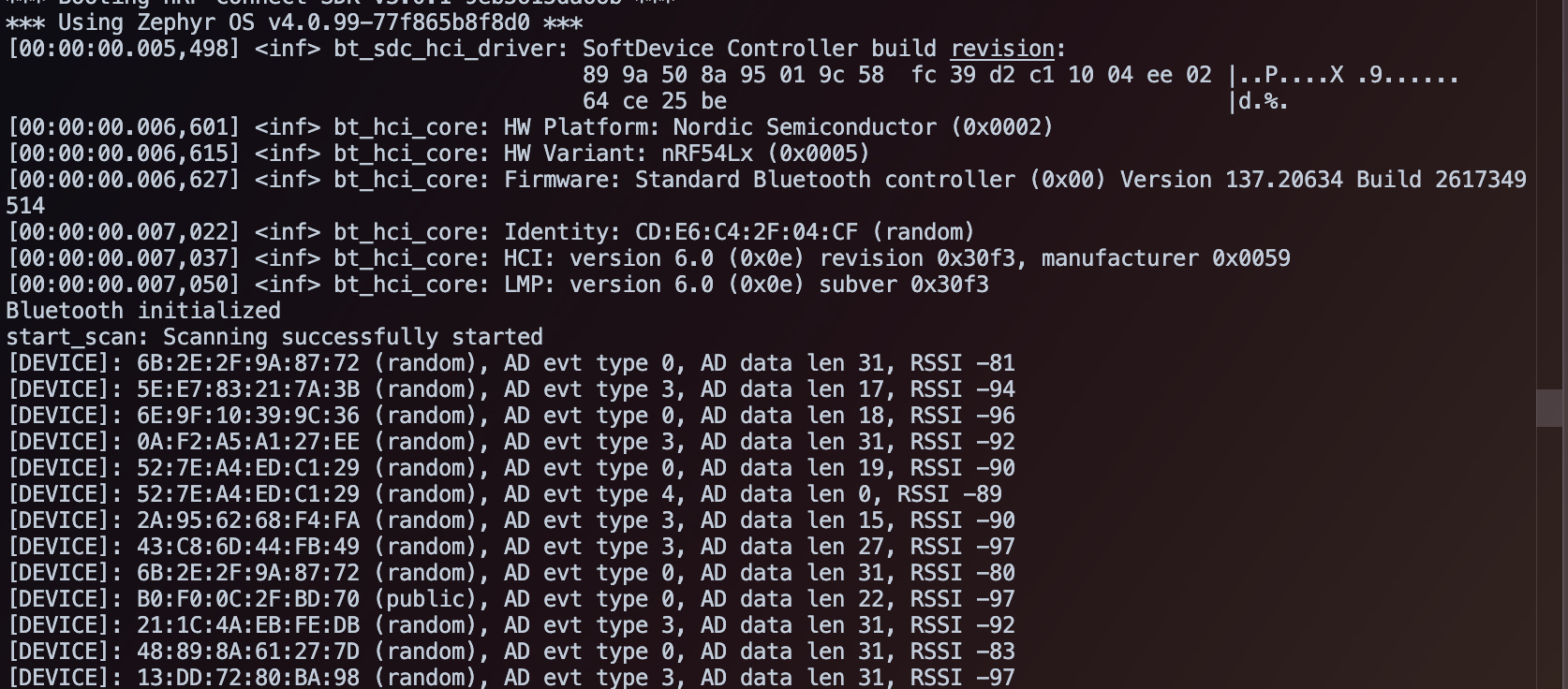
一个演示蓝牙低功耗观察者角色功能的简单应用程序。该应用程序将定期扫描附近的设备。如果发现任何设备,将设备地址、RSSI 值、广播类型和广播数据长度打印到控制台。
如果使用的蓝牙低功耗控制器支持扩展扫描,您可以在项目配置文件 prj.conf 中启用 CONFIG_BT_EXT_ADV。有关更多详细信息,请参考项目配置文件。
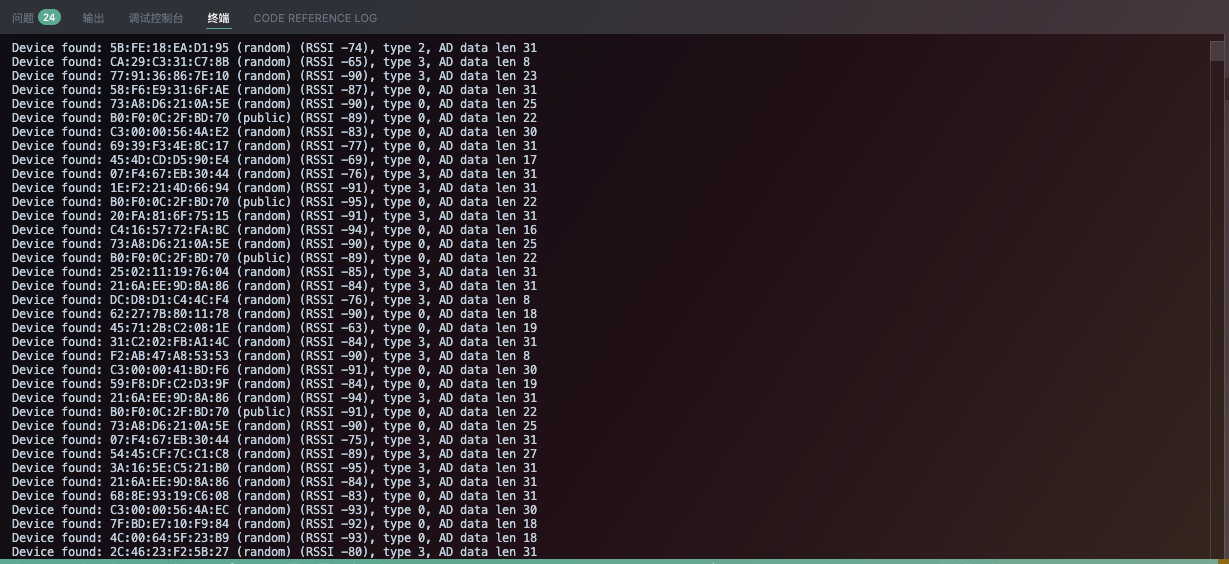
扫描结果
添加 XIAO nRF54L15 开发板
要将 XIAO nRF54L15(Sense) 开发板添加到 NCS (nRF Connect SDK),您可以参考 Seeed Studio Wiki 上的"入门指南"。该指南将提供详细的操作说明。
BLE 观察者代码
Main.c
#include <zephyr/sys/printk.h>
#include <zephyr/bluetooth/bluetooth.h>
int observer_start(void);
int main(void)
{
int err;
printk("Starting Observer Demo\n");
err = bt_enable(NULL);
if (err) {
printk("Bluetooth init failed (err %d)\n", err);
return 0;
}
(void)observer_start();
printk("Exiting %s thread.\n", __func__);
return 0;
}
-
main.c:初始化蓝牙子系统并启动观察者演示。 -
bt_enable(NULL):初始化蓝牙子系统。 -
observer_start():调用启动观察者的函数。 -
printk("Exiting %s thread.\n", __func__):在主函数退出时打印消息。
observer.c
#include <zephyr/sys/printk.h>
#include <zephyr/bluetooth/bluetooth.h>
#include <zephyr/bluetooth/hci.h>
#define NAME_LEN 30
static void device_found(const bt_addr_le_t *addr, int8_t rssi, uint8_t type,
struct net_buf_simple *ad)
{
char addr_str[BT_ADDR_LE_STR_LEN];
bt_addr_le_to_str(addr, addr_str, sizeof(addr_str));
printk("Device found: %s (RSSI %d), type %u, AD data len %u\n",
addr_str, rssi, type, ad->len);
}
#if defined(CONFIG_BT_EXT_ADV)
static bool data_cb(struct bt_data *data, void *user_data)
{
char *name = user_data;
uint8_t len;
switch (data->type) {
case BT_DATA_NAME_SHORTENED:
case BT_DATA_NAME_COMPLETE:
len = MIN(data->data_len, NAME_LEN - 1);
(void)memcpy(name, data->data, len);
name[len] = '\0';
return false;
default:
return true;
}
}
static const char *phy2str(uint8_t phy)
{
switch (phy) {
case BT_GAP_LE_PHY_NONE: return "No packets";
case BT_GAP_LE_PHY_1M: return "LE 1M";
case BT_GAP_LE_PHY_2M: return "LE 2M";
case BT_GAP_LE_PHY_CODED: return "LE Coded";
default: return "Unknown";
}
}
static void scan_recv(const struct bt_le_scan_recv_info *info,
struct net_buf_simple *buf)
{
char le_addr[BT_ADDR_LE_STR_LEN];
char name[NAME_LEN];
uint8_t data_status;
uint16_t data_len;
(void)memset(name, 0, sizeof(name));
data_len = buf->len;
bt_data_parse(buf, data_cb, name);
data_status = BT_HCI_LE_ADV_EVT_TYPE_DATA_STATUS(info->adv_props);
bt_addr_le_to_str(info->addr, le_addr, sizeof(le_addr));
printk("[DEVICE]: %s, AD evt type %u, Tx Pwr: %i, RSSI %i "
"Data status: %u, AD data len: %u Name: %s "
"C:%u S:%u D:%u SR:%u E:%u Pri PHY: %s, Sec PHY: %s, "
"Interval: 0x%04x (%u ms), SID: %u\n",
le_addr, info->adv_type, info->tx_power, info->rssi,
data_status, data_len, name,
(info->adv_props & BT_GAP_ADV_PROP_CONNECTABLE) != 0,
(info->adv_props & BT_GAP_ADV_PROP_SCANNABLE) != 0,
(info->adv_props & BT_GAP_ADV_PROP_DIRECTED) != 0,
(info->adv_props & BT_GAP_ADV_PROP_SCAN_RESPONSE) != 0,
(info->adv_props & BT_GAP_ADV_PROP_EXT_ADV) != 0,
phy2str(info->primary_phy), phy2str(info->secondary_phy),
info->interval, info->interval * 5 / 4, info->sid);
}
static struct bt_le_scan_cb scan_callbacks = {
.recv = scan_recv,
};
#endif /* CONFIG_BT_EXT_ADV */
int observer_start(void)
{
struct bt_le_scan_param scan_param = {
.type = BT_LE_SCAN_TYPE_PASSIVE,
.options = BT_LE_SCAN_OPT_FILTER_DUPLICATE,
.interval = BT_GAP_SCAN_FAST_INTERVAL,
.window = BT_GAP_SCAN_FAST_WINDOW,
};
int err;
#if defined(CONFIG_BT_EXT_ADV)
bt_le_scan_cb_register(&scan_callbacks);
printk("Registered scan callbacks\n");
#endif /* CONFIG_BT_EXT_ADV */
err = bt_le_scan_start(&scan_param, device_found);
if (err) {
printk("Start scanning failed (err %d)\n", err);
return err;
}
printk("Started scanning...\n");
return 0;
}
-
device_found:在扫描过程中发现设备时调用的回调函数。它打印设备的地址、RSSI、类型和AD数据长度。 -
scan_recv:用于扩展广播的回调函数,打印接收到的广播数据包的详细信息,包括设备地址、发射功率、RSSI和广播数据。 -
data_cb:由bt_data_parse使用的回调函数,用于从广播数据中提取设备名称。它处理缩短名称和完整名称。 -
phy2str:将PHY(物理层)值转换为人类可读字符串(例如"LE 1M"、"LE 2M"等)的辅助函数。 -
observer_start:启动观察者的主函数。它定义扫描参数并启动扫描过程。 -
bt_le_scan_start:使用指定参数和发现设备时的回调函数启动BLE扫描的函数。
BLE广播
这个蓝牙广播教程基于官方示例代码,经过修改以在Nordic Connect SDK上运行。结合我们的开发板和官方文档,您可以深入了解更多蓝牙应用。
当手机未连接到XIAO nRF54L15时,板载指示灯将保持常亮。一旦手机成功连接,指示灯将开始闪烁,表示已建立连接。
手机连接XIAO nRF54L15
BLE广播软件安装
对于这个示例,您需要在手机上下载官方蓝牙测试应用nRF Connect。
将程序烧录到XIAO nRF54L15 Sense开发板后,您可以打开nRF Connect应用的主页面与其交互。
-
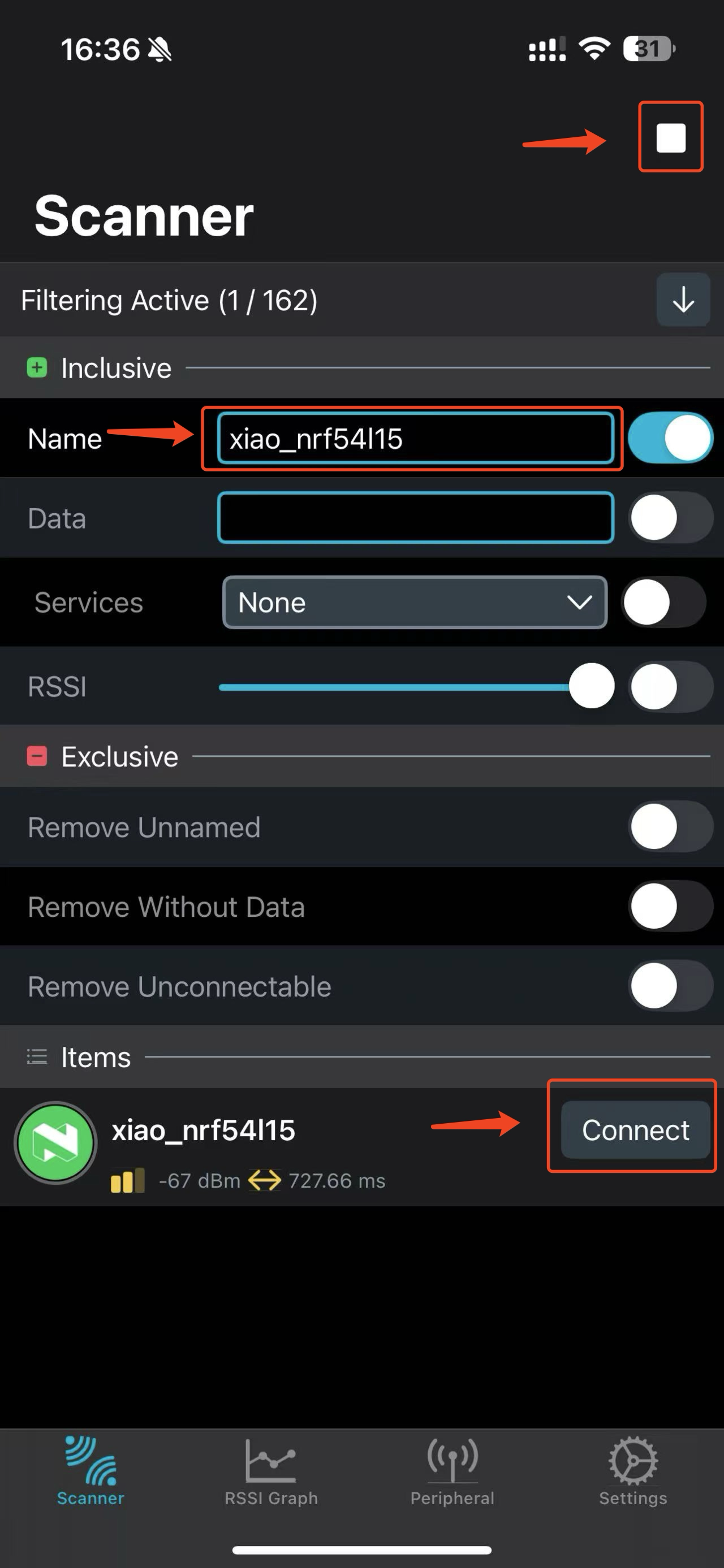
步骤1. 在nRF Connect应用中,点击右上角的扫描按钮开始扫描蓝牙设备。
-
步骤2. 接下来,在"Name"字段中输入您的XIAO nRF54L15 Sense设备名称。这将帮助您过滤并快速定位您的设备。
-
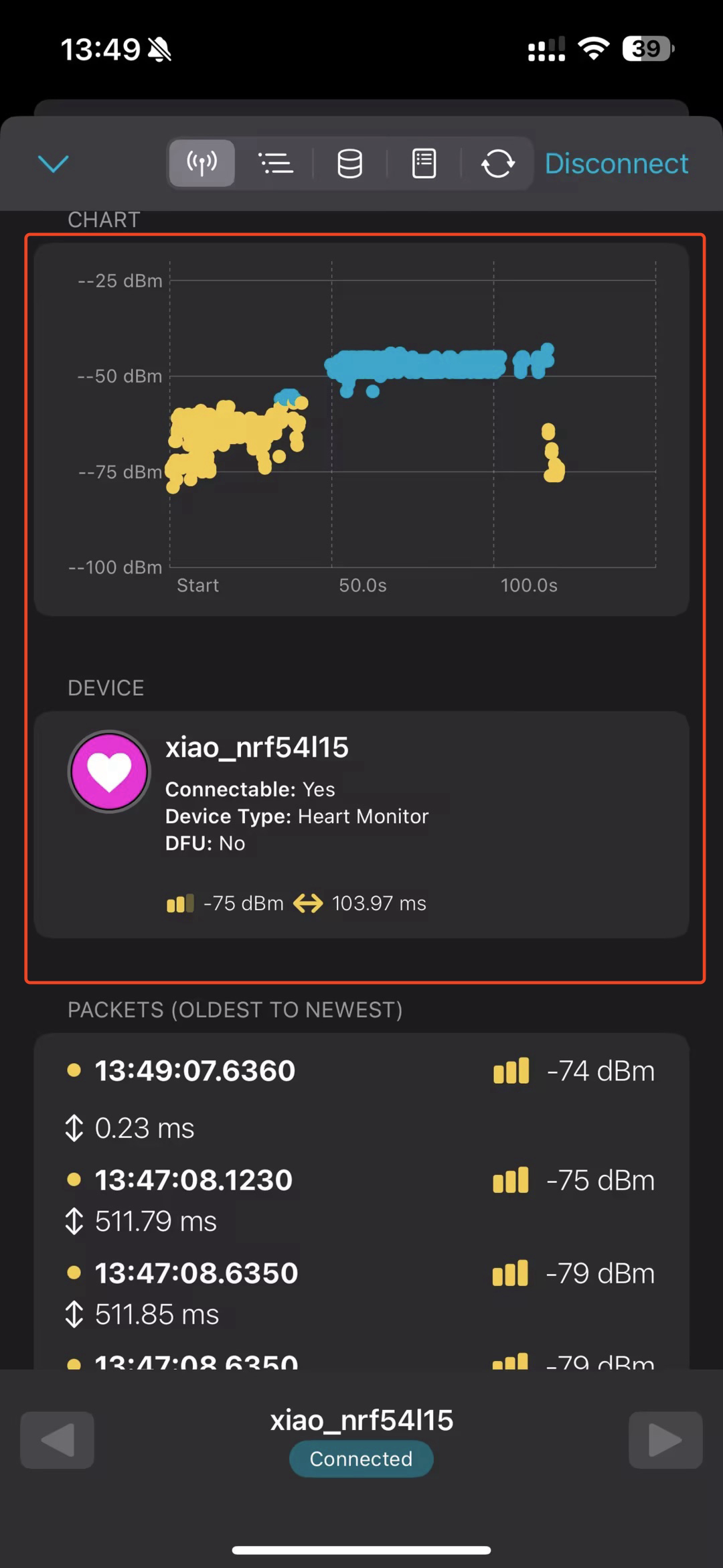
步骤3. 在扫描结果区域,找到您的XIAO nRF54L15 Sense设备并点击旁边的"Connect"按钮。
成功连接后,您将进入设备详情页面。在此页面上,您可以观察不同时间段内的蓝牙信号强度(RSSI)分布,这有助于您了解设备连接的稳定性。
 |  |
添加 XIAO nRF54L15 开发板
要将 XIAO nRF54L15(Sense) 开发板添加到 NCS (nRF Connect SDK) 中,您可以参考 Seeed Studio Wiki 上的"入门指南"。该指南将提供详细的操作步骤说明。
BLE 广播代码
#include <zephyr/kernel.h>
#include <zephyr/logging/log.h>
#include <zephyr/bluetooth/bluetooth.h>
#include <zephyr/bluetooth/gap.h>
#include <zephyr/bluetooth/conn.h>
#include <zephyr/sys/printk.h>
#include <zephyr/drivers/gpio.h>
#include <zephyr/dt-bindings/gpio/nordic-nrf-gpio.h>
LOG_MODULE_REGISTER(BLE_LowPower, LOG_LEVEL_INF);
#define DEVICE_NAME CONFIG_BT_DEVICE_NAME
#define DEVICE_NAME_LEN (sizeof(DEVICE_NAME) - 1)
static const struct gpio_dt_spec led0 = GPIO_DT_SPEC_GET(DT_ALIAS(led0), gpios);
static const struct bt_data ad[] = {
BT_DATA_BYTES(BT_DATA_FLAGS, BT_LE_AD_GENERAL | BT_LE_AD_NO_BREDR),
BT_DATA(BT_DATA_NAME_COMPLETE, DEVICE_NAME, DEVICE_NAME_LEN),
};
static unsigned char url_data[] = {
0x17,
'/', '/', 'a', 'c', 'a', 'd', 'e', 'm', 'y', '.',
'n', 'o', 'r', 'd', 'i', 'c', 's', 'e', 'm', 'i', '.',
'c', 'o', 'm'
};
static const struct bt_data sd[] = {
BT_DATA(BT_DATA_URI, url_data, sizeof(url_data)),
};
static bool device_connected = false;
static void connected(struct bt_conn *conn, uint8_t err)
{
if (err) {
LOG_ERR("Connection failed (err 0x%02x)\n", err);
} else {
LOG_INF("Device connected\n");
device_connected = true;
}
}
static void disconnected(struct bt_conn *conn, uint8_t reason)
{
LOG_INF("Device disconnected (reason 0x%02x)\n", reason);
device_connected = false;
int err = bt_le_adv_start(BT_LE_ADV_CONN, ad, ARRAY_SIZE(ad), sd, ARRAY_SIZE(sd));
if (err) {
LOG_ERR("Failed to restart advertising (err %d)\n", err);
} else {
LOG_INF("Advertising successfully restarted (connectable)\n");
}
}
BT_CONN_CB_DEFINE(conn_callbacks) = {
.connected = connected,
.disconnected = disconnected,
};
int main(void)
{
int err;
if (!gpio_is_ready_dt(&led0)) {
LOG_ERR("Error: LED device %s is not ready\n", led0.port->name);
return -1;
}
err = gpio_pin_configure_dt(&led0, GPIO_OUTPUT_INACTIVE);
if (err) {
LOG_ERR("Error: Failed to configure LED pin %d (err %d)\n", led0.pin, err);
return -1;
}
LOG_INF("LED configured, initially off.");
err = bt_enable(NULL);
if (err) {
LOG_ERR("Bluetooth initialization failed (err %d)\n", err);
return -1;
}
LOG_INF("Bluetooth initialized\n");
err = bt_le_adv_start(BT_LE_ADV_CONN, ad, ARRAY_SIZE(ad), sd, ARRAY_SIZE(sd));
if (err) {
LOG_ERR("Advertising failed to start (err %d)\n", err);
return -1;
}
LOG_INF("Advertising successfully started (connectable)\n");
while (1) {
if (device_connected) {
gpio_pin_toggle_dt(&led0);
k_sleep(K_MSEC(500));
} else {
gpio_pin_set_dt(&led0, 0);
k_sleep(K_MSEC(1000));
}
}
return 0;
}
-
ad:定义广播数据,包括通用可发现和不支持 BR/EDR 的标志,以及完整的设备名称。 -
sd:定义扫描响应数据,其中包含一个 URI(统一资源标识符)。 -
connected:当蓝牙设备成功连接时执行此回调函数。它将 device_connected 标志设置为 true。 -
disconnected:当蓝牙设备断开连接时执行此回调函数。它将 device_connected 标志设置为 false 并重新启动广播以允许新连接。 -
conn_callbacks:定义连接回调的结构,将 connected 和 disconnected 函数分配给各自的事件。 -
main:程序的主函数。 -
gpio_is_ready_dt:检查 LED GPIO 设备是否就绪。 -
gpio_pin_configure_dt:将 LED 引脚配置为输出,初始设置为非活动状态。 -
bt_enable(NULL):初始化蓝牙子系统。 -
bt_le_adv_start:启动蓝牙广播。此代码使用 ad 和 sd 数据启动可连接广播。 -
while (1):根据连接状态控制 LED 行为的无限循环。 -
gpio_pin_toggle_dt:切换 LED 的开关状态。 -
k_sleep:让线程休眠指定的时间。 -
device_connected:跟踪连接状态的布尔标志。当设备连接时,LED 以 500ms 间隔闪烁。当设备未连接时,LED 关闭,程序休眠 1000ms。 -
LOG_INF, LOG_ERR:用于记录信息和错误的函数。
BLE Central/GATT Write
这些代码文件共同实现了一个蓝牙低功耗(BLE)中央设备。中央设备持续扫描附近的蓝牙外围设备,当找到特定设备(RSSI 大于 -50)时自动建立连接。一旦建立连接,它会执行 GATT(通用属性配置文件)MTU(最大传输单元)交换以优化数据传输效率。
程序的核心功能是持续向连接的外围设备发送 GATT Write Without Response 命令。这通常用于性能测试,例如测量蓝牙连接的数据吞吐量或写入速率。
gatt 结果
添加 XIAO nRF54L15 开发板
要将 XIAO nRF54L15(Sense) 开发板添加到 NCS(nRF Connect SDK),您可以参考 Seeed Studio Wiki 上的"入门指南"。该指南将提供详细的操作说明。
BLE Central/GATT 代码
Main.c
#include <stdint.h>
extern uint32_t central_gatt_write(uint32_t count);
int main(void)
{
(void)central_gatt_write(0U);
return 0;
}
main:程序的入口点。它调用central_gatt_write函数,计数为0U,这意味着写入命令将无限期发送。
central_gatt_write.c
/*
* Copyright (c) 2022 Nordic Semiconductor ASA
*
* SPDX-License-Identifier: Apache-2.0
*/
#include <zephyr/kernel.h>
#include <zephyr/sys/printk.h>
#include <zephyr/bluetooth/bluetooth.h>
#include <zephyr/bluetooth/conn.h>
#include <zephyr/bluetooth/gatt.h>
#include <zephyr/bluetooth/hci.h>
extern int mtu_exchange(struct bt_conn *conn);
extern int write_cmd(struct bt_conn *conn);
extern struct bt_conn *conn_connected;
extern uint32_t last_write_rate;
extern void (*start_scan_func)(void);
static void device_found(const bt_addr_le_t *addr, int8_t rssi, uint8_t type,
struct net_buf_simple *ad)
{
char dev[BT_ADDR_LE_STR_LEN];
struct bt_conn *conn;
int err;
bt_addr_le_to_str(addr, dev, sizeof(dev));
printk("[DEVICE]: %s, AD evt type %u, AD data len %u, RSSI %i\n",
dev, type, ad->len, rssi);
/* We're only interested in connectable events */
if (type != BT_GAP_ADV_TYPE_ADV_IND &&
type != BT_GAP_ADV_TYPE_ADV_DIRECT_IND) {
return;
}
/* connect only to devices in close proximity */
if (rssi < -50) {
return;
}
err = bt_le_scan_stop();
if (err) {
printk("%s: Stop LE scan failed (err %d)\n", __func__, err);
return;
}
err = bt_conn_le_create(addr, BT_CONN_LE_CREATE_CONN,
BT_LE_CONN_PARAM_DEFAULT, &conn);
if (err) {
printk("%s: Create conn failed (err %d)\n", __func__, err);
start_scan_func();
} else {
bt_conn_unref(conn);
}
}
static void start_scan(void)
{
int err;
err = bt_le_scan_start(BT_LE_SCAN_ACTIVE, device_found);
if (err) {
printk("%s: Scanning failed to start (err %d)\n", __func__,
err);
return;
}
printk("%s: Scanning successfully started\n", __func__);
}
void mtu_updated(struct bt_conn *conn, uint16_t tx, uint16_t rx)
{
printk("Updated MTU: TX: %d RX: %d bytes\n", tx, rx);
}
static struct bt_gatt_cb gatt_callbacks = {
.att_mtu_updated = mtu_updated
};
uint32_t central_gatt_write(uint32_t count)
{
int err;
err = bt_enable(NULL);
if (err) {
printk("Bluetooth init failed (err %d)\n", err);
return 0U;
}
printk("Bluetooth initialized\n");
bt_gatt_cb_register(&gatt_callbacks);
conn_connected = NULL;
last_write_rate = 0U;
start_scan_func = start_scan;
start_scan_func();
while (true) {
struct bt_conn *conn = NULL;
if (conn_connected) {
/* Get a connection reference to ensure that a
* reference is maintained in case disconnected
* callback is called while we perform GATT Write
* command.
*/
conn = bt_conn_ref(conn_connected);
}
if (conn) {
(void)write_cmd(conn);
bt_conn_unref(conn);
if (count) {
count--;
if (!count) {
break;
}
}
k_yield();
} else {
k_sleep(K_SECONDS(1));
}
}
return last_write_rate;
}
-
device_found:在扫描过程中发现新设备时触发的回调函数。它打印找到的设备信息,并尝试连接既可连接又在近距离内的设备(RSSI 大于 -50)。在创建连接之前,它会停止扫描过程。 -
start_scan:启动主动 BLE 扫描的函数,使用device_found作为发现设备的回调函数。 -
mtu_updated:GATT MTU 更新的回调函数,打印新的 TX 和 RX MTU 大小。 -
gatt_callbacks:注册mtu_updated函数作为 GATT 事件回调的结构体。 -
central_gatt_write:中心设备应用程序的主函数。它初始化蓝牙子系统,注册 GATT 回调,并开始扫描设备。然后进入循环,等待连接并重复调用 write_cmd 来执行 GATT 写入。该循环可以配置为运行特定次数或无限期运行。
gatt_write_common.c
/*
* Copyright (c) 2022 Nordic Semiconductor ASA
*
* SPDX-License-Identifier: Apache-2.0
*/
#include <zephyr/kernel.h>
#include <zephyr/sys/printk.h>
#include <zephyr/bluetooth/bluetooth.h>
#include <zephyr/bluetooth/conn.h>
#include <zephyr/bluetooth/gatt.h>
#include <zephyr/bluetooth/hci.h>
static struct bt_gatt_exchange_params mtu_exchange_params;
static uint32_t write_count;
static uint32_t write_len;
static uint32_t write_rate;
struct bt_conn *conn_connected;
uint32_t last_write_rate;
void (*start_scan_func)(void);
static void write_cmd_cb(struct bt_conn *conn, void *user_data)
{
static uint32_t cycle_stamp;
uint64_t delta;
delta = k_cycle_get_32() - cycle_stamp;
delta = k_cyc_to_ns_floor64(delta);
if (delta == 0) {
/* Skip division by zero */
return;
}
/* if last data rx-ed was greater than 1 second in the past,
* reset the metrics.
*/
if (delta > (1U * NSEC_PER_SEC)) {
printk("%s: count= %u, len= %u, rate= %u bps.\n", __func__,
write_count, write_len, write_rate);
last_write_rate = write_rate;
write_count = 0U;
write_len = 0U;
write_rate = 0U;
cycle_stamp = k_cycle_get_32();
} else {
uint16_t len;
write_count++;
/* Extract the 16-bit data length stored in user_data */
len = (uint32_t)user_data & 0xFFFF;
write_len += len;
write_rate = ((uint64_t)write_len << 3) * (1U * NSEC_PER_SEC) /
delta;
}
}
static void mtu_exchange_cb(struct bt_conn *conn, uint8_t err,
struct bt_gatt_exchange_params *params)
{
printk("%s: MTU exchange %s (%u)\n", __func__,
err == 0U ? "successful" : "failed",
bt_gatt_get_mtu(conn));
}
static int mtu_exchange(struct bt_conn *conn)
{
int err;
printk("%s: Current MTU = %u\n", __func__, bt_gatt_get_mtu(conn));
mtu_exchange_params.func = mtu_exchange_cb;
printk("%s: Exchange MTU...\n", __func__);
err = bt_gatt_exchange_mtu(conn, &mtu_exchange_params);
if (err) {
printk("%s: MTU exchange failed (err %d)", __func__, err);
}
return err;
}
static void connected(struct bt_conn *conn, uint8_t conn_err)
{
struct bt_conn_info conn_info;
char addr[BT_ADDR_LE_STR_LEN];
int err;
bt_addr_le_to_str(bt_conn_get_dst(conn), addr, sizeof(addr));
if (conn_err) {
printk("%s: Failed to connect to %s (%u)\n", __func__, addr,
conn_err);
return;
}
err = bt_conn_get_info(conn, &conn_info);
if (err) {
printk("Failed to get connection info (%d).\n", err);
return;
}
printk("%s: %s role %u\n", __func__, addr, conn_info.role);
conn_connected = bt_conn_ref(conn);
(void)mtu_exchange(conn);
#if defined(CONFIG_BT_SMP)
if (conn_info.role == BT_CONN_ROLE_CENTRAL) {
err = bt_conn_set_security(conn, BT_SECURITY_L2);
if (err) {
printk("Failed to set security (%d).\n", err);
}
}
#endif
}
static void disconnected(struct bt_conn *conn, uint8_t reason)
{
struct bt_conn_info conn_info;
char addr[BT_ADDR_LE_STR_LEN];
int err;
bt_addr_le_to_str(bt_conn_get_dst(conn), addr, sizeof(addr));
err = bt_conn_get_info(conn, &conn_info);
if (err) {
printk("Failed to get connection info (%d).\n", err);
return;
}
printk("%s: %s role %u, reason %u %s\n", __func__, addr, conn_info.role,
reason, bt_hci_err_to_str(reason));
conn_connected = NULL;
bt_conn_unref(conn);
if (conn_info.role == BT_CONN_ROLE_CENTRAL) {
start_scan_func();
}
}
static bool le_param_req(struct bt_conn *conn, struct bt_le_conn_param *param)
{
printk("%s: int (0x%04x, 0x%04x) lat %u to %u\n", __func__,
param->interval_min, param->interval_max, param->latency,
param->timeout);
return true;
}
static void le_param_updated(struct bt_conn *conn, uint16_t interval,
uint16_t latency, uint16_t timeout)
{
printk("%s: int 0x%04x lat %u to %u\n", __func__, interval,
latency, timeout);
}
#if defined(CONFIG_BT_SMP)
static void security_changed(struct bt_conn *conn, bt_security_t level,
enum bt_security_err err)
{
printk("%s: to level %u, err %s(%u)\n", __func__, level, bt_security_err_to_str(err), err);
}
#endif
BT_CONN_CB_DEFINE(conn_callbacks) = {
.connected = connected,
.disconnected = disconnected,
.le_param_req = le_param_req,
.le_param_updated = le_param_updated,
#if defined(CONFIG_BT_SMP)
.security_changed = security_changed,
#endif
};
int write_cmd(struct bt_conn *conn)
{
static uint8_t data[BT_ATT_MAX_ATTRIBUTE_LEN] = {0, };
static uint16_t data_len;
uint16_t data_len_max;
int err;
data_len_max = bt_gatt_get_mtu(conn) - 3;
if (data_len_max > BT_ATT_MAX_ATTRIBUTE_LEN) {
data_len_max = BT_ATT_MAX_ATTRIBUTE_LEN;
}
#if TEST_FRAGMENTATION_WITH_VARIABLE_LENGTH_DATA
/* Use incremental length data for every write command */
/* TODO: Include test case in BabbleSim tests */
static bool decrement;
if (decrement) {
data_len--;
if (data_len <= 1) {
data_len = 1;
decrement = false;
}
} else {
data_len++;
if (data_len >= data_len_max) {
data_len = data_len_max;
decrement = true;
}
}
#else
/* Use fixed length data for every write command */
data_len = data_len_max;
#endif
/* Pass the 16-bit data length value (instead of reference) in
* user_data so that unique value is pass for each write callback.
* Using handle 0x0001, we do not care if it is writable, we just want
* to transmit the data across.
*/
err = bt_gatt_write_without_response_cb(conn, 0x0001, data, data_len,
false, write_cmd_cb,
(void *)((uint32_t)data_len));
if (err) {
printk("%s: Write cmd failed (%d).\n", __func__, err);
}
return err;
}
-
write_cmd_cb:一个用于 bt_gatt_write_without_response_cb 的回调函数。它计算并打印写入次数、长度和数据速率(以每秒比特数 bps 为单位)。如果自上次接收数据以来的时间超过一秒,它会重置这些指标。 -
mtu_exchange_cb:一个在 MTU(最大传输单元)交换过程后调用的回调函数。它打印交换是否成功或失败,并显示新的 MTU 大小。 -
mtu_exchange:启动 MTU 交换过程。它首先打印当前 MTU,然后尝试进行交换,使用 mtu_exchange_cb 作为回调。 -
connected:连接建立时执行的回调函数。它打印已连接设备的地址及其角色。然后存储连接的引用并启动 MTU 交换。如果启用了安全性,它会尝试设置安全级别。 -
disconnected:连接终止时执行的回调函数。它打印已断开连接设备的地址、其角色和断开连接的原因。它清除连接引用,如果设备是中心设备,则重新启动扫描。 -
le_param_req:用于处理来自外围设备的 LE 连接参数更新请求的回调函数。它打印请求的参数(间隔、延迟和超时)。 -
le_param_updated:连接参数成功更新时调用的回调函数。它打印新的间隔、延迟和超时值。 -
security_changed:连接的安全级别发生变化时调用的回调函数。 -
write_cmd:准备并发送不需要响应的 GATT 写入命令的函数。它根据当前 MTU 确定最大数据长度,并将数据发送到句柄 0x0001。它使用 write_cmd_cb 作为回调。
技术支持与产品讨论
感谢您选择我们的产品!我们在这里为您提供不同的支持,以确保您使用我们产品的体验尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。