使用 Seeed Studio XIAO nRF54LM20A Sense 进行引脚复用

XIAO nRF54LM20A 具有丰富的引脚资源,原生支持使用 Digital、Analog、SPI 和 IIC 等多种标准外设接口进行开发。本文通过实际应用案例演示相关实现方法。
本教程基于 PlatformIO 构建系统和 Zephyr RTOS 开发。 如果你还不熟悉如何在 PlatformIO 下为 XIAO nRF54LM20A 创建项目,可以跳转到 Getting Sarted With Seeed Studio XIAO nRF54LM20A Sense
数字引脚
数字引脚主要通过输出高低电平,实现对外部传感器和执行器的通断控制。结合 Grove Base for XIAO 扩展板和标准 Grove 外设模块,本节将详细阐述 XIAO nRF54LM20A 上数字引脚的底层驱动逻辑和实际调用方式。
硬件准备
| Seeed Studio XIAO nRF54LM20A Sense | Seeed Studio Grove Base for XIAO | Grove - Piezo Buzzer | Grove - Button |
|---|---|---|---|
 |  |  | |
软件准备
根据 XIAO nRF54LM20A 的引脚分布,可以选择 P1.0 作为 Grove-Button 的控制引脚,P1.31 作为 Grove-Pizero Buzzer 的控制引脚。
- 关于 XIAO nRF54LM20A 的引脚分布,点击 XIAO nRF54LM20A Pin List 查看详情。
为 main.c 编写程序
/*
* Grove Button (P1.0) + Grove Buzzer (P1.31) - Digital mode
* Button pressed → Buzzer ON; Button released → Buzzer OFF
*
* NOTE: Requires an ACTIVE buzzer (built-in oscillator).
* A passive piezo buzzer needs PWM — use plan B instead.
*/
#include <zephyr/kernel.h>
#include <zephyr/device.h>
#include <zephyr/drivers/gpio.h>
#include <zephyr/sys/printk.h>
#define BUTTON_PIN 0 /* P1.0 - Grove Button - D0 */
#define BUZZER_PIN 31 /* P1.31 - Grove Buzzer - D1 */
int main(void)
{
const struct device *gpio1_dev = DEVICE_DT_GET(DT_NODELABEL(gpio1));
printk("=== Grove Button + Buzzer (Digital Mode) ===\n");
if (!device_is_ready(gpio1_dev))
{
printk("ERROR: gpio1 device is not ready!\n");
return -1;
}
printk("gpio1 device ready: %s\n", gpio1_dev->name);
/* Grove Button has onboard pull-down; HIGH = pressed */
gpio_pin_configure(gpio1_dev, BUTTON_PIN, GPIO_INPUT);
/* Buzzer: HIGH = on */
gpio_pin_configure(gpio1_dev, BUZZER_PIN, GPIO_OUTPUT_INACTIVE);
printk("Button: P1.%d (input)\n", BUTTON_PIN);
printk("Buzzer: P1.%d (output)\n", BUZZER_PIN);
printk("Press the button to turn on the buzzer...\n");
int last_val = 0;
while (1)
{
int val = gpio_pin_get(gpio1_dev, BUTTON_PIN);
if (val >= 0)
{
gpio_pin_set(gpio1_dev, BUZZER_PIN, val);
/* Only print on state change to avoid log spam */
if (val != last_val)
{
printk("Button %s → Buzzer %s\n",
val ? "PRESSED " : "released",
val ? "ON" : "OFF");
last_val = val;
}
}
k_msleep(10);
}
return 0;
}
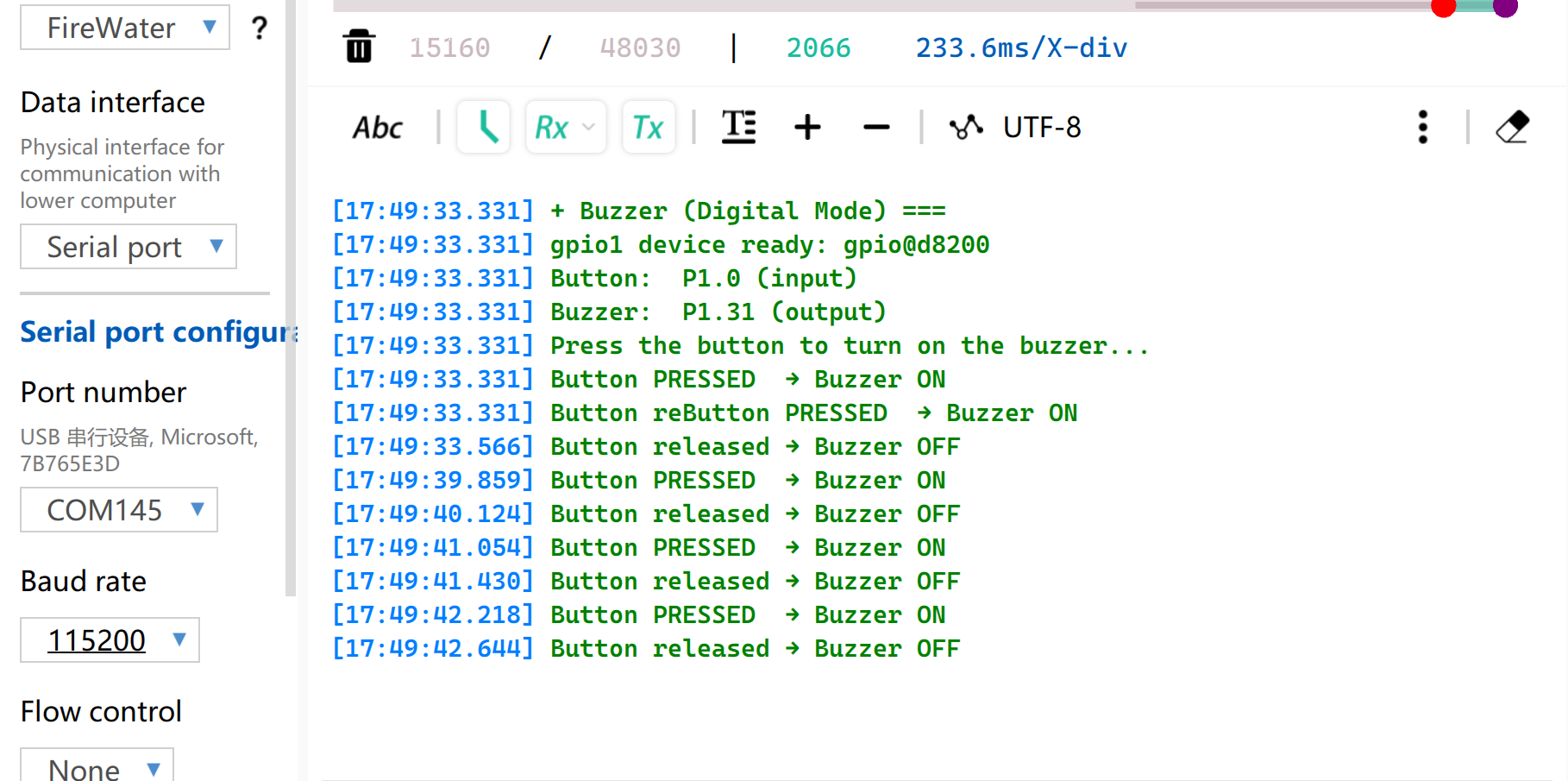
结果
烧录固件后,按下按钮,蜂鸣器会发出滴声,同时串口会打印状态。
注意将波特率设置为 115200。如果你直接在 VS 中打开 Monitor,建议在 .ini 文件中设置波特率。
PWM
PWM 是一种基于数字输出 GPIO 实现的定时波形输出功能。它以固定频率快速切换引脚电平,并在单个周期内动态调节高电平的占空比,从而向外设输出等效的模拟信号。在实际工程应用中,PWM 被广泛用于舵机的精确角度控制以及 LED 的平滑亮度调节。
硬件准备
| Seeed Studio XIAO nRF54LM20A Sense | Seeed Studio Grove Base for XIAO | Grove - Servo |
|---|---|---|
|  | |
软件准备
根据 XIAO nRF54LM20A 的引脚分布,P1.0 可以作为 Grove-Servo 的控制引脚。
- 关于 XIAO nRF54LM20A 的引脚分布,点击 XIAO nRF54LM20A Pin List 查看详情。
- 修改设备树文件
app.overlay。对于 PWM 输出功能,必须将硬件实例显式绑定到pwm20、pwm21或pwm22节点。系统默认的 UART 控制台输出挂载在uart20节点上。
app.overlay
/*
* UART20 (console) + PWM20 (servo) configuration for XIAO nRF54LM20A.
*
* Note: spi23 and uart20 share the same peripheral instance (0xc6000),
* so only one can be active at a time. SD card via spi23 is removed here.
*/
/ {
chosen {
zephyr,console = &uart20;
nordic,rpc-uart = &uart20;
zephyr,shell-uart = &uart20;
};
};
/* ── UART20 (console, TX: P1.11 / RX: P1.10) ── */
&uart20 {
current-speed = <115200>;
status = "okay";
};
&uart20_default {
group1 {
psels = <NRF_PSEL(UART_TX, 1, 11)>;
};
group2 {
psels = <NRF_PSEL(UART_RX, 1, 10)>;
bias-pull-up;
};
};
&uart20_sleep {
group1 {
psels = <NRF_PSEL(UART_TX, 1, 11)>,
<NRF_PSEL(UART_RX, 1, 10)>;
low-power-enable;
};
};
/* ── PWM20 (servo, P1.0) ── */
&pwm20 {
status = "okay";
pinctrl-0 = <&servo_pwm20_default>;
pinctrl-1 = <&servo_pwm20_sleep>;
pinctrl-names = "default", "sleep";
};
&pinctrl {
servo_pwm20_default: servo_pwm20_default {
group1 {
psels = <NRF_PSEL(PWM_OUT0, 1, 0)>; /* P1.0 */
};
};
servo_pwm20_sleep: servo_pwm20_sleep {
group1 {
psels = <NRF_PSEL(PWM_OUT0, 1, 0)>;
low-power-enable;
};
};
};
- 修改
prj.conf文件以启用相关 PWM 配置。
CONFIG_PWM=y
CONFIG_SERIAL=y
CONFIG_PRINTK=y
CONFIG_UART_CONSOLE=y
- 编写 main.c 程序,实现 PWM 舵机控制功能,并配置 PWM 周期等参数。
/*
* Servo control on P1.0 via PWM (50 Hz).
* Sweeps 0→180° at ~100°/s, then returns 180→0° at ~33°/s.
* Current angle is printed to serial console.
*/
#include <zephyr/kernel.h>
#include <zephyr/device.h>
#include <zephyr/drivers/pwm.h>
#include <zephyr/sys/printk.h>
/* Standard servo: 50 Hz period, 0.5–2.5 ms pulse for 0–180° */
#define SERVO_PERIOD_NS PWM_MSEC(20)
#define SERVO_MIN_NS PWM_USEC(500)
#define SERVO_MAX_NS PWM_USEC(2500)
#define SERVO_CHANNEL 0
/* 10 ms/step → ~100°/s forward; 30 ms/step → ~33°/s return */
#define STEP_FWD_MS 30
#define STEP_RET_MS 30
static const struct device *pwm_dev = DEVICE_DT_GET(DT_NODELABEL(pwm20));
static int set_angle(int degrees)
{
uint32_t pulse = SERVO_MIN_NS +
(uint32_t)((uint64_t)degrees *
(SERVO_MAX_NS - SERVO_MIN_NS) / 180U);
return pwm_set(pwm_dev, SERVO_CHANNEL, SERVO_PERIOD_NS, pulse,
PWM_POLARITY_NORMAL);
}
int main(void)
{
printk("=== boot ===\n");
if (!device_is_ready(pwm_dev))
{
printk("Error: PWM device not ready\n");
return -1;
}
printk("Servo control started on P1.0\n");
while (1)
{
/* 0° → 180° (faster) */
for (int a = 0; a <= 180; a++)
{
if (set_angle(a) != 0)
{
printk("PWM error at %d deg\n", a);
}
else
{
printk("Angle: %d deg\n", a);
}
k_msleep(STEP_FWD_MS);
}
/* 180° → 0° (slower) */
for (int a = 180; a >= 0; a--)
{
if (set_angle(a) != 0)
{
printk("PWM error at %d deg\n", a);
}
else
{
printk("Angle: %d deg\n", a);
}
k_msleep(STEP_RET_MS);
}
}
return 0;
}
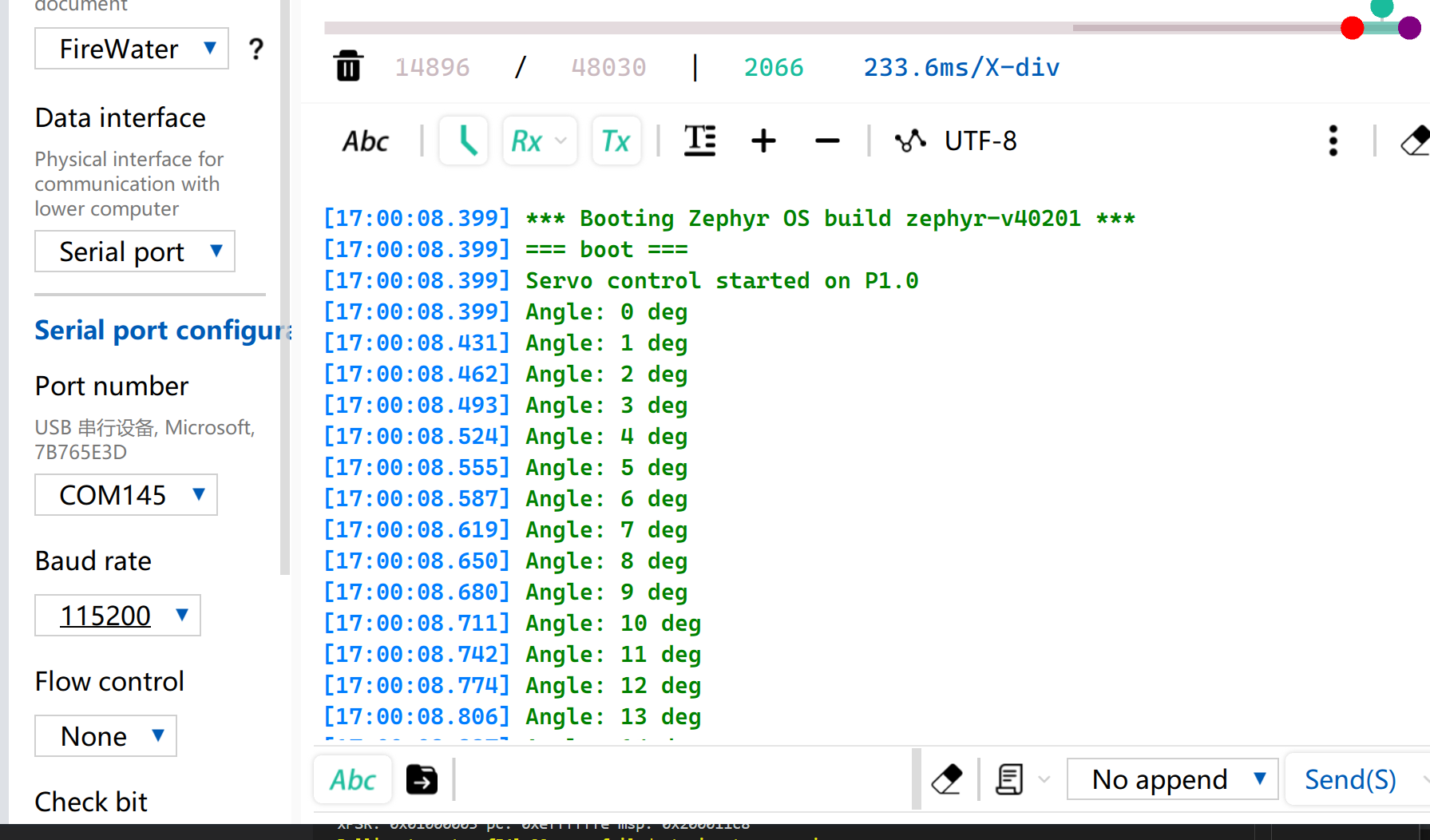
结果
固件烧录完成后,舵机将以 33 弧度每秒的速度从 0° 旋转到 180°,然后再旋转回 0°。
同时,当前舵机角度会通过 USB 串口打印输出。
模拟量
模拟量 I/O 基于模数转换器(ADC),主要用于采集外部传感器输出的连续模拟电压信号。获取原始数字采样值(Raw Data)后,可通过特定的线性或非线性转换算法映射为实际工程测量值。该功能广泛应用于电池电压采样,以及对土壤湿度、环境温度等物理量的实时监测等场景。
硬件准备
| Seeed Studio XIAO nRF54LM20A Sense | Seeed Studio Grove Base for XIAO | Grove - Capacitive Soil Moisture Sensor |
|---|---|---|
|  | |
软件准备
根据 XIAO nRF54LM20A 的引脚定义,将 P1.00 设置为 PWM 输出引脚。
- 关于 XIAO nRF54LM20A 的引脚定义,点击 XIAO nRF54LM20A Pin List 查看详情。
- 修改设备树文件。引脚 P1.00 对应 ADC 通道 0,需要绑定到设备树节点。
/*
* UART20 (console) + ADC channel 0 (P1.0 / AIN0) for XIAO nRF54LM20A.
*/
/ {
chosen {
zephyr,console = &uart20;
nordic,rpc-uart = &uart20;
zephyr,shell-uart = &uart20;
};
zephyr,user {
io-channels = <&adc 0>;
};
};
/* ── UART20 (console, TX: P1.11 / RX: P1.10) ── */
&uart20 {
current-speed = <115200>;
status = "okay";
};
&uart20_default {
group1 {
psels = <NRF_PSEL(UART_TX, 1, 11)>;
};
group2 {
psels = <NRF_PSEL(UART_RX, 1, 10)>;
bias-pull-up;
};
};
&uart20_sleep {
group1 {
psels = <NRF_PSEL(UART_TX, 1, 11)>,
<NRF_PSEL(UART_RX, 1, 10)>;
low-power-enable;
};
};
- 修改
prj.conf文件以启用 ADC 相关配置。
CONFIG_ADC=y
CONFIG_ADC_NRFX_SAADC=y
CONFIG_SERIAL=y
CONFIG_PRINTK=y
CONFIG_UART_CONSOLE=y
- 编写 main.c 程序,将 P1.00 引脚作为模拟输入引脚,并每隔 500ms 通过 USB 串口输出读取到的数值。
/*
* Read ADC on P1.0 (AIN0, channel 0) and print raw value every 500 ms.
*/
#include <zephyr/kernel.h>
#include <zephyr/drivers/adc.h>
#include <zephyr/sys/printk.h>
static const struct adc_dt_spec adc_ch =
ADC_DT_SPEC_GET(DT_PATH(zephyr_user));
int main(void)
{
int ret;
if (!adc_is_ready_dt(&adc_ch))
{
printk("ADC not ready\n");
return -1;
}
ret = adc_channel_setup_dt(&adc_ch);
if (ret < 0)
{
printk("ADC channel setup failed: %d\n", ret);
return ret;
}
int16_t buf;
struct adc_sequence seq = {
.buffer = &buf,
.buffer_size = sizeof(buf),
};
adc_sequence_init_dt(&adc_ch, &seq);
while (1)
{
ret = adc_read_dt(&adc_ch, &seq);
if (ret < 0)
{
printk("ADC read error: %d\n", ret);
}
else
{
printk("ADC raw: %d\n", buf);
}
k_msleep(500);
}
return 0;
}
结果
程序烧录完成后,将 Grove-Capacitive Soil Moisture Sensor 插入家用盆栽中。
在电脑上打开串口助手,观察输出数值。
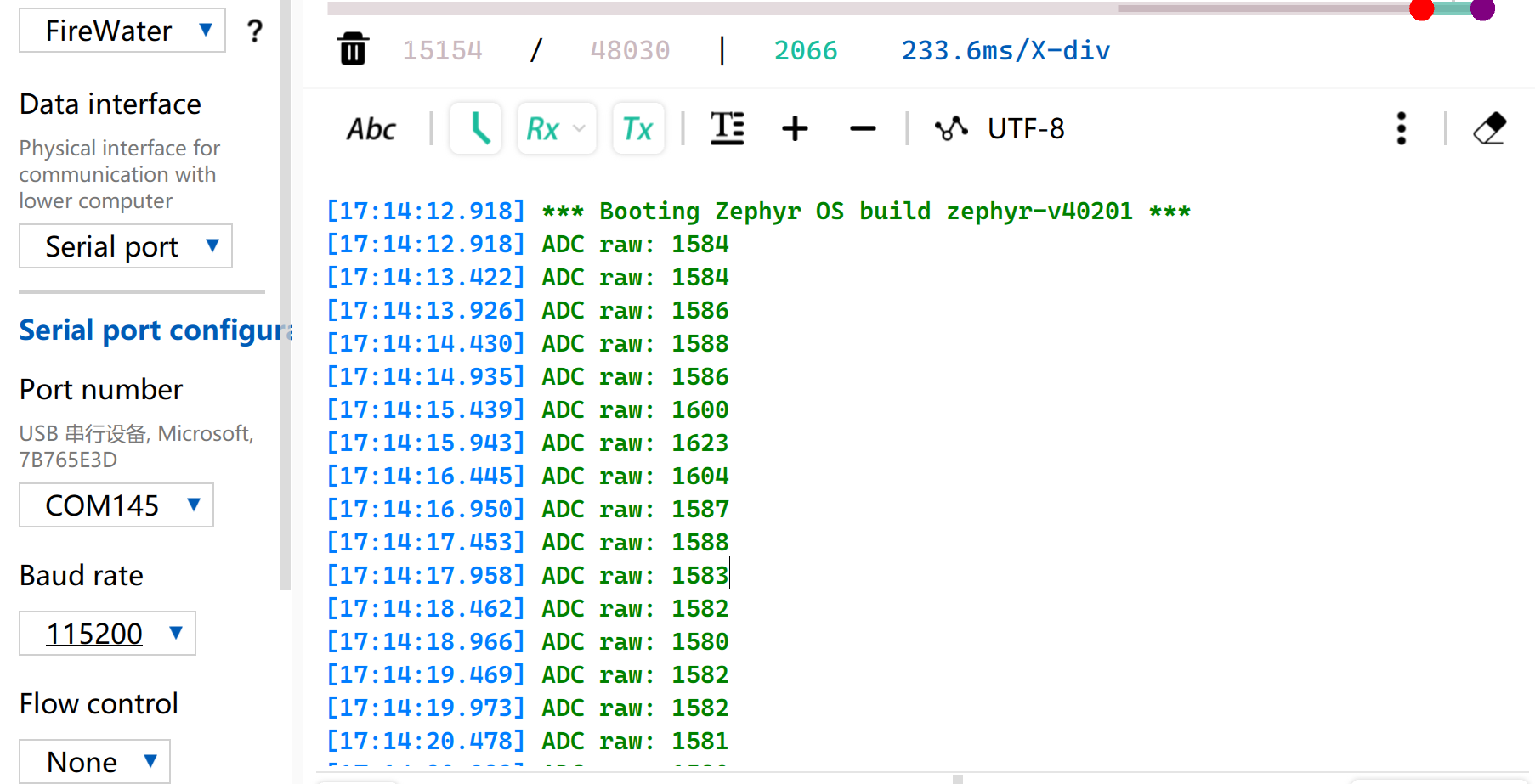
电压参考读数表
| 状态 | 传感器输出电压 | 期望 ADC 原始值 |
|---|---|---|
| 空气中(干燥) | ~2.0–2.4V | ~3400–4095 |
| 湿润土壤中 | ~1.3–1.8V | ~2200–3000 |
| 完全浸没在水中 | ~0.8–1.2V | ~1365–2048 |
由于元器件存在个体差异,不同模组在相同环境下的测量结果可能会有所不同。
UART
通用异步收发器(UART)是一种标准的异步串行通信协议。它不需要外部时钟信号进行同步,而是依靠通信双方预先约定的波特率来实现数据的异步发送与接收。在物理连线方面,只需将设备的 TX 与 RX 引脚交叉连接并共地,即可建立全双工数据链路。由于硬件成本极低且支持收发同时进行,UART 被广泛应用于嵌入式系统中的控制台日志输出、模块化外设调试以及低带宽点对点数据通信等场景。
硬件准备
| Seeed Studio XIAO nRF54LM20A Sense | USB 转 TTL 转换器 |
|---|---|
 | |
软件准备
根据 XIAO nRF54LM20A 的引脚分布,P1.08 和 P1.09 可分别选择为串口通信的 TX 和 RX 引脚。
- 关于 XIAO nRF54LM20A 的引脚分布,点击 XIAO nRF54LM20A Pin List 查看详情。
- 修改设备树文件,将引脚 P1.08 映射为 UART TX、P1.09 映射为 UART RX 到
uart21节点,并将串口波特率设置为 115200。
/*
* UART21 Demo - Device Tree Overlay for XIAO nRF54LM20A
* UART21: TX=P1.8, RX=P1.9
*
* Note: The pinctrl configuration is already defined in the board file.
* This overlay enables UART21 and sets it as disabled for the default console
* so it can be used as a general-purpose serial port.
*/
/* UART21 is already configured in the board dts, just make sure it's enabled */
&uart20 {
current-speed = <115200>;
status = "okay";
};
/* UART21 is already configured in the board dts, just make sure it's enabled */
&uart21 {
current-speed = <115200>;
status = "okay";
};
- 修改
prj.conf配置文件以启用相关 UART 配置。
# Serial and UART
CONFIG_SERIAL=y
# This demo uses uart_poll_in()/uart_poll_out().
# On nrfx UARTE, enabling async mode for the instance makes uart_poll_in()
# return -ENOTSUP, which breaks RX on uart21.
# Console (for logging via UART20)
CONFIG_CONSOLE=y
CONFIG_UART_CONSOLE=y
# Logging
CONFIG_LOG=y
CONFIG_LOG_BACKEND_UART=y
CONFIG_LOG_DEFAULT_LEVEL=3
- 编写主函数。当按下板载 BOOT 按钮时,将通过串口向电脑打印串口状态和引脚配置;否则默认打印运行状态。
main.c
/*
* UART21 Demo for XIAO nRF54LM20A (Polling Mode)
*
* This demo shows how to use UART21 for serial communication using polling mode.
* - TX: P1.08
* - RX: P1.09
* - Baud rate: 115200
*
* The demo will:
* 1. Send a welcome message on startup
* 2. Echo back any received characters
* 3. Periodically send a heartbeat message
*/
#include <zephyr/kernel.h>
#include <zephyr/device.h>
#include <zephyr/drivers/uart.h>
#include <zephyr/logging/log.h>
#include <stdio.h>
#include <string.h>
LOG_MODULE_REGISTER(uart21_demo, LOG_LEVEL_INF);
/* UART21 device */
static const struct device *uart21_dev = DEVICE_DT_GET(DT_NODELABEL(uart21));
#define RX_BUF_SIZE 128
#define TX_BUF_SIZE 256
#define HEARTBEAT_INTERVAL_MS 5000
static uint8_t rx_buf[RX_BUF_SIZE];
static size_t rx_buf_pos = 0;
static char tx_buf[TX_BUF_SIZE];
/* Send a string over UART21 using polling */
static void uart21_send_string(const char *str)
{
while (*str)
{
uart_poll_out(uart21_dev, *str++);
}
}
/* Receive a character from UART21 (non-blocking) */
static int uart21_recv_char(uint8_t *c)
{
return uart_poll_in(uart21_dev, c);
}
static void handle_complete_line(void)
{
rx_buf[rx_buf_pos] = '\0';
if (rx_buf_pos > 0)
{
LOG_INF("Received: %s", rx_buf);
uart21_send_string("\r\nYou sent: ");
uart21_send_string((const char *)rx_buf);
}
uart21_send_string("\r\n");
rx_buf_pos = 0;
memset(rx_buf, 0, sizeof(rx_buf));
}
/* Process a received byte and maintain a simple line buffer */
static void process_rx_byte(uint8_t c)
{
static bool last_was_cr;
if (c == '\r' || c == '\n')
{
if (c == '\n' && last_was_cr)
{
last_was_cr = false;
return;
}
uart21_send_string("\r\n");
handle_complete_line();
last_was_cr = (c == '\r');
return;
}
last_was_cr = false;
uart_poll_out(uart21_dev, c);
if (rx_buf_pos < RX_BUF_SIZE - 1)
{
rx_buf[rx_buf_pos++] = c;
return;
}
uart21_send_string("\r\n[Warning] Input too long, buffer cleared.\r\n");
rx_buf_pos = 0;
memset(rx_buf, 0, sizeof(rx_buf));
}
int main(void)
{
uint8_t c;
uint32_t heartbeat_count = 0;
int64_t last_heartbeat = 0;
LOG_INF("========================================");
LOG_INF(" UART21 Demo for XIAO nRF54LM20A");
LOG_INF("========================================");
LOG_INF("");
/* Check if UART21 device is ready */
if (!device_is_ready(uart21_dev))
{
LOG_ERR("UART21 device not ready!");
return -1;
}
LOG_INF("UART21 device ready: %s", uart21_dev->name);
/* Send welcome message */
uart21_send_string("\r\n");
uart21_send_string("========================================\r\n");
uart21_send_string(" UART21 Demo for XIAO nRF54LM20A\r\n");
uart21_send_string("========================================\r\n");
uart21_send_string("\r\n");
uart21_send_string("Pin Configuration:\r\n");
uart21_send_string(" TX: P1.08\r\n");
uart21_send_string(" RX: P1.09\r\n");
uart21_send_string(" Baud Rate: 115200\r\n");
uart21_send_string("\r\n");
uart21_send_string("Type something and press Enter to see it echoed.\r\n");
uart21_send_string("\r\n");
LOG_INF("UART21 demo started. Waiting for data...");
LOG_INF("Connect UART terminal to P1.8(TX) and P1.9(RX)");
last_heartbeat = k_uptime_get();
/* Main loop */
while (1)
{
/* Check for received data */
if (uart21_recv_char(&c) == 0)
{
process_rx_byte(c);
}
/* Check for heartbeat */
int64_t now = k_uptime_get();
if (now - last_heartbeat >= HEARTBEAT_INTERVAL_MS)
{
last_heartbeat = now;
heartbeat_count++;
snprintf(tx_buf, sizeof(tx_buf),
"\r\n[Heartbeat #%u] UART21 running...\r\n",
heartbeat_count);
uart21_send_string(tx_buf);
LOG_INF("Heartbeat #%u sent", heartbeat_count);
}
/* Small delay to prevent busy loop */
k_msleep(10);
}
return 0;
}
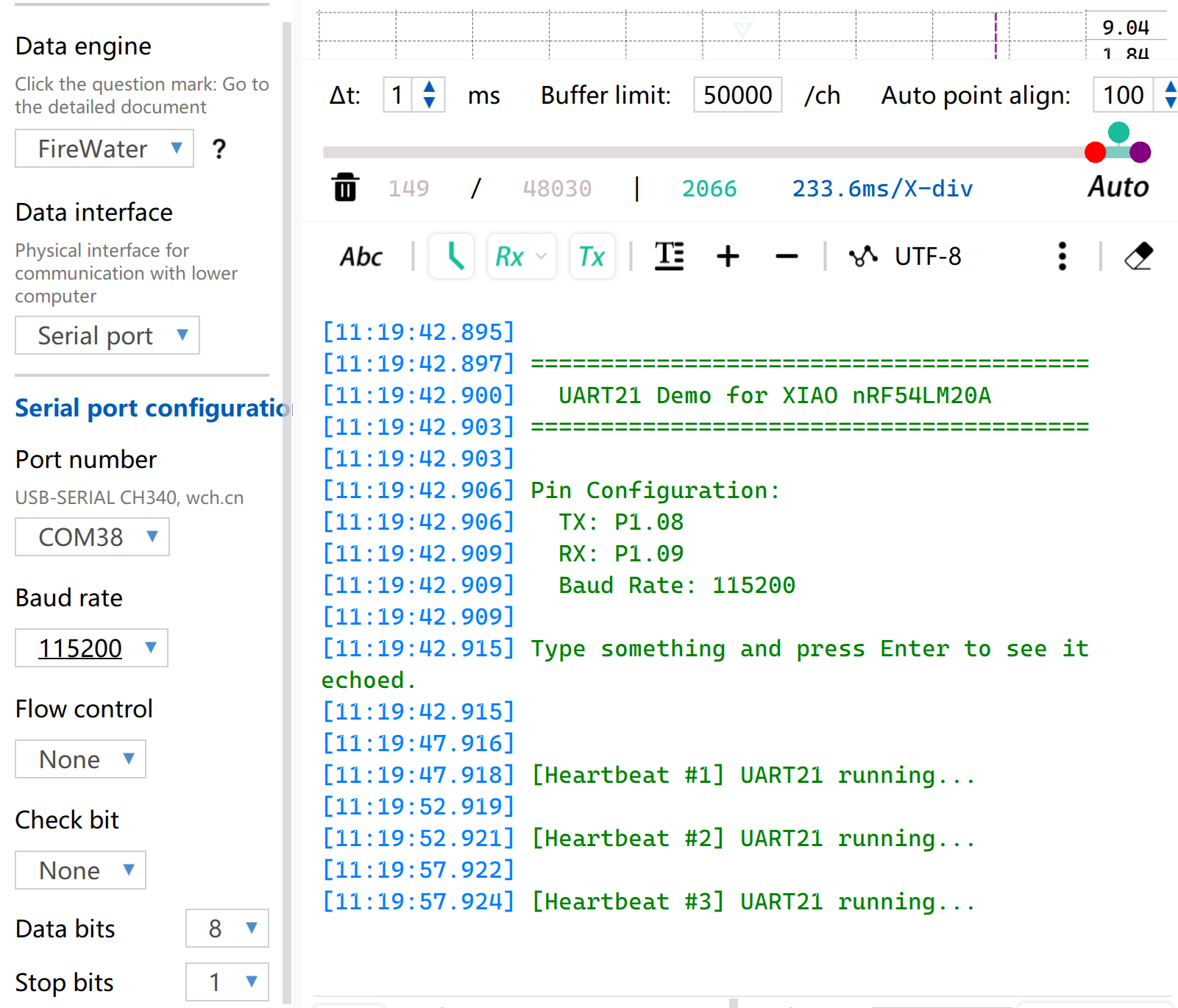
结果
- 按照表格顺序进行接线
| XIAO nRF54LM20A | CH340 |
|---|---|
| VBUS | 5V |
| GND | GND |
| P1.08 - TX | RX |
| P1.09 - RX | TX |
- 在电脑上打开串口监控软件。当按下板载 BOOT 按钮时,将通过串口打印已配置的串口信息。默认情况下,会打印字符串
[Heartbeat # number] UART21 running...。
I2C
I2C 是一种同步、半双工的数据通信协议。它通过 SCL 时钟线和 SDA 数据线进行寻址,实现多设备连接,常用于读取对传输速率要求较高的传感器数据,例如 IMU 和温湿度传感器,或用于 OLED 显示输出。
硬件准备
| Seeed Studio XIAO nRF54LM20A Sense | Seeed Studio Expansion Board Base for XIAO |
|---|---|
 | |
软件准备
根据 XIAO nRF54LM20A 的引脚分布,P1.03 和 P1.07 可以配置为 I2C 引脚。
- 关于 XIAO nRF54LM20A 的引脚分布,点击 XIAO nRF54LM20A Pin List 查看详情。
- 修改设备树,将 XIAO nRF54LM20A 上的 P1.03 和 P1.07 分别配置为
i2c22设备树节点的引脚,然后添加显示屏的设备树节点。该 OLED 显示屏分辨率为 128×64,采用常见的 SSD1306 驱动芯片。
/ {
chosen {
zephyr,display = &ssd1306_128x64;
};
};
&i2c22 {
status = "okay";
zephyr,concat-buf-size = <2048>;
ssd1306_128x64: ssd1306@3c {
compatible = "solomon,ssd1306fb";
reg = <0x3c>;
width = <128>;
height = <64>;
segment-offset = <0>;
page-offset = <0>;
display-offset = <0>;
multiplex-ratio = <63>;
segment-remap;
com-invdir;
prechargep = <0x22>;
};
};
- 修改
prj.conf文件以启用 I2C 和显示相关配置。
CONFIG_STDOUT_CONSOLE=y
CONFIG_HEAP_MEM_POOL_SIZE=16384
CONFIG_I2C=y
CONFIG_DISPLAY=y
CONFIG_SSD1306=y
CONFIG_LOG=y
CONFIG_LOG_DEFAULT_LEVEL=4
CONFIG_CHARACTER_FRAMEBUFFER=y
- 编写主函数,为字符串设置显示位置和功能。
main.c
#include <zephyr/kernel.h>
#include <zephyr/device.h>
#include <zephyr/display/cfb.h>
#include <stdio.h>
#include <string.h>
#define LOG_LEVEL CONFIG_LOG_DEFAULT_LEVEL
#include <zephyr/logging/log.h>
LOG_MODULE_REGISTER(main_app, LOG_LEVEL);
#define CFB_MAX_FONT_INDEX 42
/* Display content */
#define LINE1_TEXT "Hello XIAO"
#define LINE2_TEXT "nRF54LM20A"
#define TOTAL_LINES 2
static int display_init(const struct device **dev) {
*dev = DEVICE_DT_GET(DT_CHOSEN(zephyr_display));
if (!device_is_ready(*dev)) {
LOG_ERR("Device %s not ready", (*dev)->name);
return -1;
}
if (display_set_pixel_format(*dev, PIXEL_FORMAT_MONO10) != 0) {
if (display_set_pixel_format(*dev, PIXEL_FORMAT_MONO01) != 0) {
LOG_ERR("Failed to set required pixel format");
return -1;
}
}
LOG_INF("Initialized %s", (*dev)->name);
return 0;
}
static int framebuffer_setup(const struct device *dev) {
if (cfb_framebuffer_init(dev)) {
LOG_ERR("Framebuffer initialization failed!");
return -1;
}
cfb_framebuffer_clear(dev, false);
display_blanking_off(dev);
return 0;
}
static int select_font(const struct device *dev, uint8_t *font_width, uint8_t *font_height) {
int chosen_font_idx = -1;
uint8_t current_font_width, current_font_height;
for (int idx = 0; idx < CFB_MAX_FONT_INDEX; idx++) {
if (cfb_get_font_size(dev, idx, ¤t_font_width, ¤t_font_height) != 0) {
continue;
}
if (current_font_width == 0 || current_font_height == 0) {
continue;
}
if (current_font_width == 8 && current_font_height == 8) {
chosen_font_idx = idx;
*font_width = current_font_width;
*font_height = current_font_height;
cfb_framebuffer_set_font(dev, chosen_font_idx);
LOG_INF("Selected 8x8 font idx: %d", chosen_font_idx);
break;
}
if (chosen_font_idx == -1) {
chosen_font_idx = idx;
*font_width = current_font_width;
*font_height = current_font_height;
cfb_framebuffer_set_font(dev, chosen_font_idx);
LOG_INF("Fallback font idx: %d, size: %dx%d",
chosen_font_idx, *font_width, *font_height);
}
}
if (chosen_font_idx == -1) {
LOG_ERR("No suitable font found!");
return -1;
}
return 0;
}
/**
* @brief Print a line of text centered on the display
* @param dev Display device
* @param text String to be printed
* @param line_index Index of current line (0-indexed)
* @param total_lines Total number of lines (for vertical centering calculation)
* @param font_width Font width in pixels
* @param font_height Font height in pixels
* @param x_res Horizontal resolution of the display
* @param y_res Vertical resolution of the display
*/
static void print_text_centered(const struct device *dev,
const char *text,
int line_index,
int total_lines,
uint8_t font_width,
uint8_t font_height,
uint16_t x_res,
uint16_t y_res)
{
int text_len = (int)strlen(text);
/* Horizontal center: (screen width - total text pixel width) / 2 */
int pixel_x = (x_res - text_len * font_width) / 2;
/* Vertical center: calculate total block height first, then offset current line */
int block_height = total_lines * font_height;
int pixel_y = (y_res - block_height) / 2 + line_index * font_height;
/* Prevent coordinate out-of-bounds */
if (pixel_x < 0) pixel_x = 0;
if (pixel_y < 0) pixel_y = 0;
if (cfb_print(dev, text, pixel_x, pixel_y)) {
LOG_ERR("Failed to print \"%s\" at (%d, %d)", text, pixel_x, pixel_y);
}
LOG_DBG("Print \"%s\" at pixel (%d, %d)", text, pixel_x, pixel_y);
}
int main(void) {
const struct device *dev;
uint8_t font_width = 0;
uint8_t font_height = 0;
if (display_init(&dev) != 0) return 0;
if (framebuffer_setup(dev) != 0) return 0;
if (select_font(dev, &font_width, &font_height) != 0) return 0;
uint16_t x_res = cfb_get_display_parameter(dev, CFB_DISPLAY_WIDTH);
uint16_t y_res = cfb_get_display_parameter(dev, CFB_DISPLAY_HEIGHT);
LOG_INF("Display resolution: %dx%d", x_res, y_res);
cfb_set_kerning(dev, 0);
while (1) {
cfb_framebuffer_clear(dev, false);
print_text_centered(dev, LINE1_TEXT, 0, TOTAL_LINES,
font_width, font_height, x_res, y_res);
print_text_centered(dev, LINE2_TEXT, 1, TOTAL_LINES,
font_width, font_height, x_res, y_res);
cfb_framebuffer_finalize(dev);
k_sleep(K_MSEC(1000));
}
return 0;
}
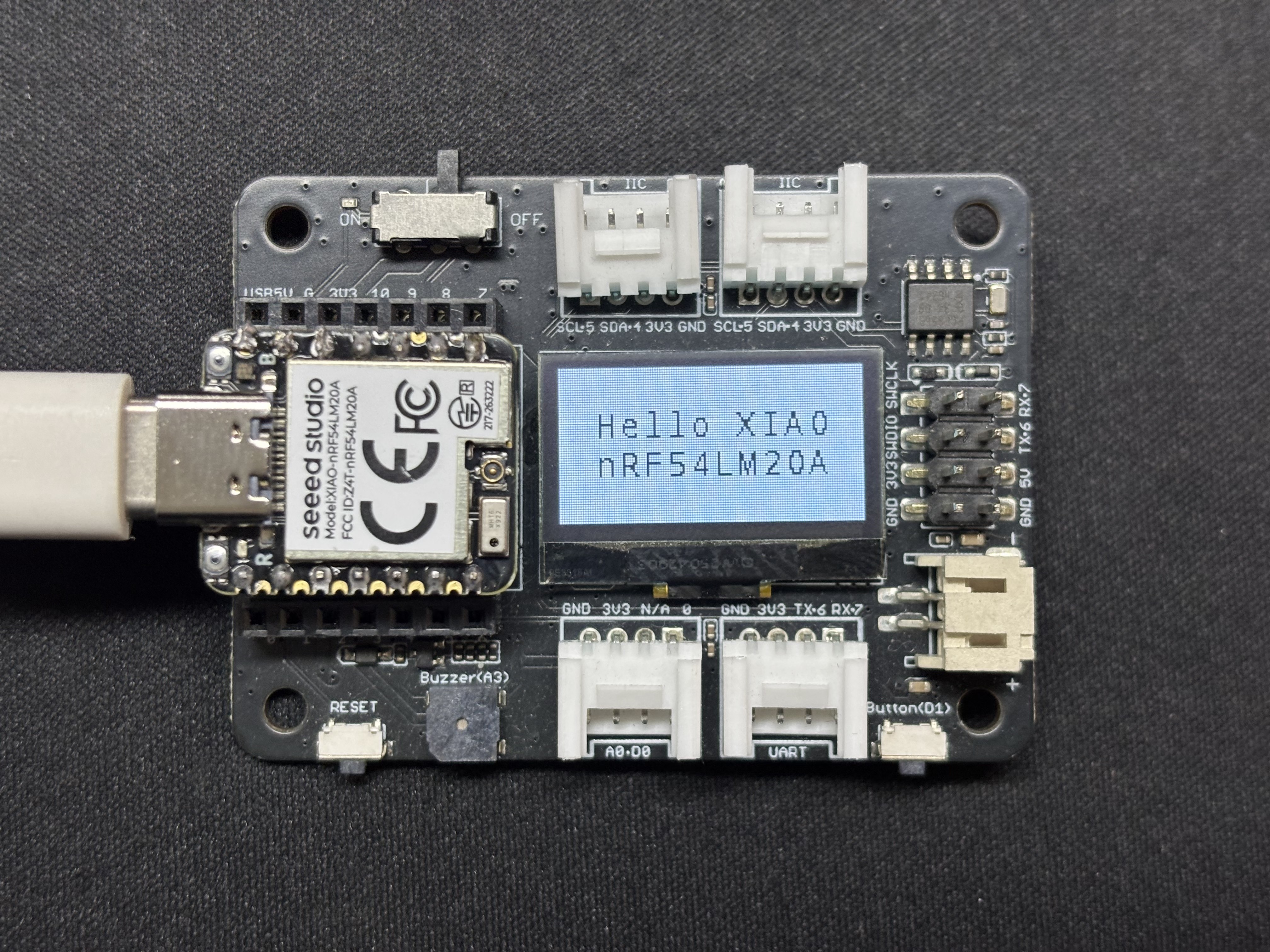
结果
程序运行后,文本 Hello XIAO nRF54LM20A 将显示在屏幕上,并通过 USB 串口打印线程数据。
SPI
SPI 是一种高速、同步、全双工的通信协议。与异步通信不同,SPI 依赖专用的 SCLK 时钟线实现精确的数据同步。它通常采用由 MOSI、MISO 和片选 CS/SS 引脚组成的经典四线硬件拓扑结构。凭借独立的数据发送和接收通道以及较高的总线时钟频率,SPI 具备出色的数据吞吐能力。它被广泛应用于对带宽要求较高的外设驱动场景,例如 Flash 和 SD 卡等大容量存储设备、高分辨率高刷新率的屏幕显示,以及高频采样传感器。
硬件准备
| Seeed Studio XIAO nRF54LM20A Sense | Round Display for Seeed Studio XIAO |
|---|---|
 | |
软件准备
- 关于 XIAO nRF54LM20A 的引脚分布,请点击 XIAO nRF54LM20A Pin List 查看详情。
- 修改设备树文件。为了驱动 LCD 屏幕,需要在设备树中启用 spi23 节点并配置引脚映射。将 P1.04、P1.05 和 P1.06 分别设置为 SPI SCK、MISO 和 MOSI。同时,将 P1.31 和 P1.29 配置为屏幕的 CS(片选)和 DC(数据/命令)控制引脚。
app.overlay
#include <dt-bindings/pinctrl/nrf-pinctrl.h>
#include <zephyr/dt-bindings/gpio/gpio.h>
#include <zephyr/dt-bindings/display/panel.h>
/*
* GC9X01X 240x240 round LCD configuration for XIAO nRF54LM20A
* SPI23: SCK=P1.04 MOSI=P1.06 MISO=P1.05
* CS: P1.31 (SPI bus software CS)
* DC: P1.29 (Data/Command select, on MIPI DBI node)
*
* In Zephyr 4.x the GC9X01X driver uses the MIPI DBI interface.
* The display node must be a child of a zephyr,mipi-dbi-spi node,
* which references the SPI controller via spi-dev phandle.
*/
/ {
chosen {
zephyr,console = &uart20;
nordic,rpc-uart = &uart20;
zephyr,shell-uart = &uart20;
zephyr,display = &gc9x01x;
};
mipi_dbi {
compatible = "zephyr,mipi-dbi-spi";
spi-dev = <&spi23>;
dc-gpios = <&gpio1 29 GPIO_ACTIVE_HIGH>;
write-only;
#address-cells = <1>;
#size-cells = <0>;
gc9x01x: gc9x01x@0 {
compatible = "galaxycore,gc9x01x";
reg = <0>;
mipi-max-frequency = <40000000>;
pixel-format = <PANEL_PIXEL_FORMAT_RGB_565>;
display-inversion;
width = <240>;
height = <240>;
status = "okay";
};
};
};
&spi23 {
compatible = "nordic,nrf-spim";
pinctrl-names = "default", "sleep";
pinctrl-0 = <&spi23_default>;
pinctrl-1 = <&spi23_sleep>;
status = "okay";
/* CS P1.31 — index 0 used by the MIPI DBI driver */
cs-gpios = <&gpio1 31 GPIO_ACTIVE_LOW>;
};
&uart20 {
status = "okay";
};
&pinctrl {
spi23_default: spi23_default {
group1 {
psels = <NRF_PSEL(SPIM_SCK, 1, 4)>,
<NRF_PSEL(SPIM_MOSI, 1, 6)>;
};
group2 {
psels = <NRF_PSEL(SPIM_MISO, 1, 5)>;
bias-pull-up;
};
};
spi23_sleep: spi23_sleep {
group1 {
psels = <NRF_PSEL(SPIM_SCK, 1, 4)>,
<NRF_PSEL(SPIM_MOSI, 1, 6)>,
<NRF_PSEL(SPIM_MISO, 1, 5)>;
low-power-enable;
};
};
};
&uart20_default {
/delete-node/ group1;
/delete-node/ group2;
group1 {
psels = <NRF_PSEL(UART_TX, 1, 11)>;
};
group2 {
psels = <NRF_PSEL(UART_RX, 1, 10)>;
bias-pull-up;
};
};
&uart20_sleep {
/delete-node/ group1;
group1 {
psels = <NRF_PSEL(UART_TX, 1, 11)>,
<NRF_PSEL(UART_RX, 1, 10)>;
low-power-enable;
};
};
- 修改 prj.conf 以启用 SPI 相关配置。
CONFIG_LOG=y
CONFIG_LOG_DEFAULT_LEVEL=3
CONFIG_CONSOLE=y
CONFIG_UART_CONSOLE=y
CONFIG_GPIO=y
CONFIG_SPI=y
CONFIG_DISPLAY=y
CONFIG_CHARACTER_FRAMEBUFFER=y
CONFIG_CHARACTER_FRAMEBUFFER_USE_DEFAULT_FONTS=y
CONFIG_HEAP_MEM_POOL_SIZE=32768
CONFIG_MAIN_STACK_SIZE=4096
- 修改 main.c 程序并编写纯色屏幕填充逻辑。
main.c
#include <zephyr/kernel.h>
#include <zephyr/device.h>
#include <zephyr/display/cfb.h>
#include <zephyr/drivers/display.h>
#include <string.h>
#include <stdlib.h>
#define LOG_LEVEL CONFIG_LOG_DEFAULT_LEVEL
#include <zephyr/logging/log.h>
LOG_MODULE_REGISTER(gc9a01_demo, LOG_LEVEL);
/* GC9A01 Resolution */
#define LCD_W 240
#define LCD_H 240
/* RGB565 Color Definitions */
#define COLOR_BLACK 0x0000U
#define COLOR_WHITE 0xFFFFU
#define COLOR_RED 0xF800U
#define COLOR_GREEN 0x07E0U
#define COLOR_BLUE 0x001FU
#define COLOR_YELLOW 0xFFE0U
#define COLOR_CYAN 0x07FFU
#define COLOR_MAGENTA 0xF81FU
#define COLOR_ORANGE 0xFD20U
/* -------------------------------------------------------
* Low-level: Fill entire screen using display_write
* buf: RGB565 pixel buffer, length = w * h * 2 bytes
* ------------------------------------------------------- */
static uint16_t fb[LCD_W * LCD_H]; /* ~115 KB, declared globally to avoid stack overflow */
static void fill_screen(const struct device *dev, uint16_t color)
{
/* RGB565 Big-endian (Default for GC9A01) */
uint16_t be = (color >> 8) | (color << 8);
for (int i = 0; i < LCD_W * LCD_H; i++) {
fb[i] = be;
}
struct display_buffer_descriptor desc = {
.buf_size = sizeof(fb),
.width = LCD_W,
.height = LCD_H,
.pitch = LCD_W,
};
display_write(dev, 0, 0, &desc, fb);
}
/* -------------------------------------------------------
* Scene 1: Solid color full-screen fill, cycle colors
* ------------------------------------------------------- */
static void demo_solid_colors(const struct device *dev)
{
static const uint16_t colors[] = {
COLOR_RED, COLOR_GREEN, COLOR_BLUE,
COLOR_YELLOW, COLOR_CYAN, COLOR_MAGENTA,
};
static const char *names[] = {
"RED", "GREEN", "BLUE", "YELLOW", "CYAN", "MAGENTA",
};
for (int i = 0; i < ARRAY_SIZE(colors); i++) {
LOG_INF("Solid: %s", names[i]);
fill_screen(dev, colors[i]);
k_sleep(K_MSEC(600));
}
}
/* -------------------------------------------------------
* Scene 2: Color vertical bars (6 bars, 40px width each)
* ------------------------------------------------------- */
static void demo_color_bars(const struct device *dev)
{
static const uint16_t bar_colors[] = {
COLOR_RED, COLOR_ORANGE, COLOR_YELLOW,
COLOR_GREEN, COLOR_BLUE, COLOR_MAGENTA,
};
static const int BAR_W = LCD_W / ARRAY_SIZE(bar_colors); /* = 40 */
for (int y = 0; y < LCD_H; y++) {
for (int x = 0; x < LCD_W; x++) {
uint16_t c = bar_colors[x / BAR_W];
uint16_t be = (c >> 8) | (c << 8);
fb[y * LCD_W + x] = be;
}
}
struct display_buffer_descriptor desc = {
.buf_size = sizeof(fb),
.width = LCD_W,
.height = LCD_H,
.pitch = LCD_W,
};
display_write(dev, 0, 0, &desc, fb);
LOG_INF("Color bars");
k_sleep(K_MSEC(2000));
}
/* -------------------------------------------------------
* Main Application
* ------------------------------------------------------- */
int main(void)
{
LOG_INF("GC9A01 demo — XIAO nRF54LM20A");
const struct device *dev = DEVICE_DT_GET(DT_CHOSEN(zephyr_display));
if (!device_is_ready(dev)) {
LOG_ERR("Display device not ready");
return 0;
}
/* Set pixel format: GC9A01 uses RGB565 */
if (display_set_pixel_format(dev, PIXEL_FORMAT_RGB_565) != 0) {
LOG_ERR("Failed to set pixel format");
return 0;
}
display_blanking_off(dev);
LOG_INF("Display ready, starting demo loop");
while (1) {
demo_solid_colors(dev); /* 6-color cycle ~3.6s */
demo_color_bars(dev); /* Color vertical bars ~2s */
}
return 0;
}
结果
上电后,程序按红、橙、黄、绿、青、蓝、紫的顺序刷新屏幕,最后显示彩色条纹图案。
技术支持与产品讨论
感谢您选择我们的产品!我们为您提供多种支持,确保您在使用我们产品的过程中尽可能顺利。我们提供多种沟通渠道,以满足不同的偏好和需求。