Seeed Studio XIAO RA4M1 与 MicroPython
MicroPython 是一个具有部分原生代码编译功能的 Python 解释器。它提供了 Python 3.5 功能的子集,专为嵌入式处理器和受限系统实现。它与 CircuitPython 不同,您可以在 MicroPython 文档 中了解更多差异。
在 XIAO RA4M1 上使用 MicroPython
接下来,我将指导您如何在 XIAO MG24 Senese 上使用 MicroPython,并基于 Windows 操作系统使用 Thonny IDE 进行编程。
硬件准备

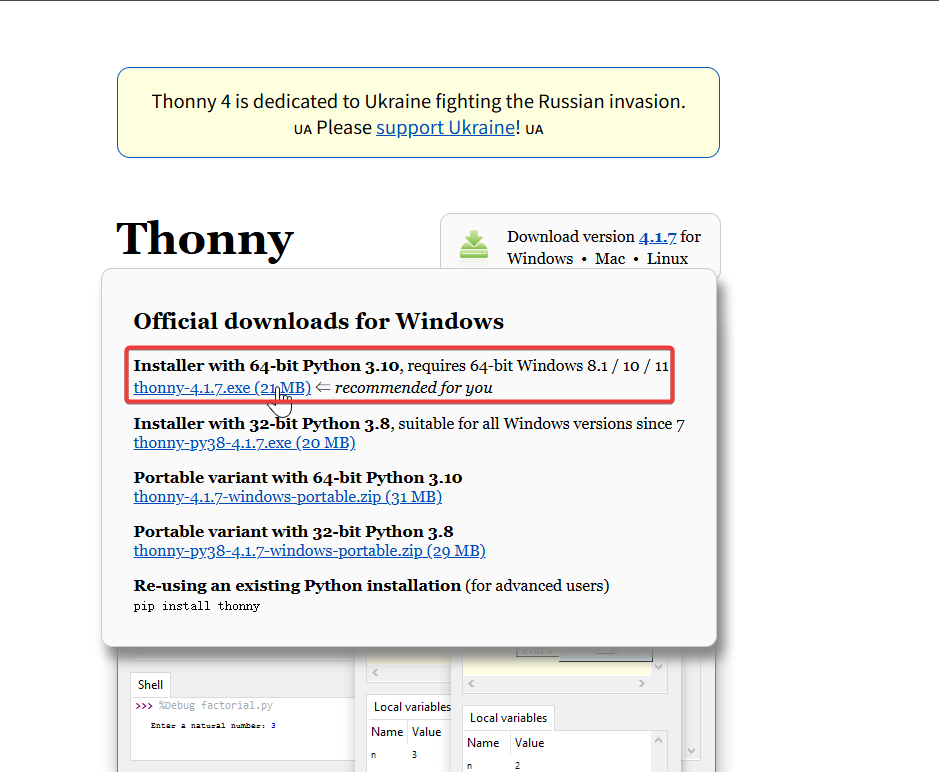
安装 Thonny IDE
选择适当的版本进行安装。在这里,我在 Windows 系统上安装,所以选择了 Windows 版本。
按照所需 Python 版本的说明进行操作。
然后,只需按照默认步骤进行配置。
下载仓库
将其克隆到本地机器,然后记住存储此 XIAO RA4M1 MicroPython 的路径。此路径稍后会用到。
git clone https://github.com/Seeed-Studio/micropython-seeed-boards.git
LED 闪烁示例
在这里,我们将向您展示如何使用 MicroPython 和 Thonny IDE 点亮 XIAO MG24 上的 USER LED。
步骤 1. 刷写 MicroPython 固件
-
下载 XIAO RA4M1 MicroPython 固件 包并将其解压到适当位置。然后在此文件夹中打开终端。
-
将 XIAO RA4M1 插入 XIAO XIAO Debug Mate。

- 点击 xiao_ra4m1_flash.bat 并等待编程完成。

- 对于 Mac / Linux
sudo chmod +x xiao_ra4m1_flash.sh && ./xiao_ra4m1_flash.sh
此脚本已预配置刷写工具链命令。如果您是第一次使用,可能需要一点时间。
完成固件编程后,您需要将 XIAO RA4M1 从 XIAO XIAO XIAO Debug Mate 中拔出,并通过 USB-C 连接。
步骤 2. 解释器配置
打开 Thonny IDE,然后点击界面右下角配置解释器选项。选择 MicroPython (generic) 和端口。配置成功后,Shell 中将显示 MicroPython 版本信息。

步骤 3. 上传 boards 文件
- 打开视图,选择 File,文件管理器路径将显示在左侧边栏。

- 打开克隆或下载文件的路径,并打开
micropython-seeed-boards-master\examples-boards 文件夹中有多个 xiao Python 文件,但 XIAO RAM41 的闪存容量有限,所以您只需要保留两个文件:xiao.py和xiao_ra4m1.py。

- 选择 boards 文件夹并将其上传到闪存。然后,您将能够在 MicroPython 设备/闪存上看到上传的文件。

步骤 4. 运行代码
点击 File -> New 创建新文件并将其保存为 blink.py。
import time
from boards.xiao import XiaoPin
led = "led"
try:
# Initialize LED
led = XiaoPin(led, XiaoPin.OUT)
while True:
# LED 0.5 seconds on, 0.5 seconds off
led.value(1)
time.sleep(0.5)
led.value(0)
time.sleep(0.5)
except KeyboardInterrupt:
print("\nProgram interrupted by user")
except Exception as e:
print("\nError occurred: %s" % {e})
finally:
led.value(1)
代码说明:
-
导入模块
time导入时间模块Xiao Pin从 boards.xiao 模块导入 Seeed Xiao 开发板的引脚控制类,用于操作板上的引脚。
-
定义引脚
led = "led""指定引脚连接到开发板的led引脚(这里是 USER 引脚)
-
主逻辑(try 块)
- USER LED 将以 0.5 秒间隔闪烁。
复制上述代码,然后点击绿色按钮或按 F5 运行。

代码开始运行后,USER LED 将以 0.5 秒间隔闪烁。
结果如下:

PWM 示例
在 XIAO RA4M1 中,引脚 D5–D10 支持 PWM 功能。我们将以 PWM 呼吸灯为例介绍如何使用 PWM 功能。
硬件准备
| Seeed Studio XIAO RA4M1 | Seeed Studio Grove Base for XIAO | Grove - Variable Color LED |
|---|---|---|
 |  |  |
软件
- 创建一个名为 pwm.py 的新文件并将参考代码复制到其中。
- 由于 XIAO RA4M1 只有引脚 D5–D10 支持 PWM 功能,这里选择引脚 D9。
import time
from boards.xiao import XiaoPWM
led = 9 #D9
try:
# set the frequency and period of the PWM signal
FREQ = 1000
PERIOD_NS = int(1_000_000_000 // FREQ)
# set the number of steps to fade the LED and the delay between steps
FADE_STEPS = 255
STEP_DELAY = 0.01
STEP_SIZE = 3
# initialize the PWM with a frequency and a 0% duty cycle
pwm = XiaoPWM(led)
pwm.init(freq=FREQ, duty=0)
while True:
# fade the LED in and out
for fade in range(0, FADE_STEPS + 1, STEP_SIZE):
duty_ns = int((fade * PERIOD_NS) / FADE_STEPS)
if duty_ns < 20:
duty_ns = 20
elif duty_ns > 960000:
duty_ns = 960000
pwm.duty_ns(duty_ns)
time.sleep(STEP_DELAY)
# fade the LED in and out again
for fade in range(FADE_STEPS, -1, -STEP_SIZE):
duty_ns = int((fade * PERIOD_NS) / FADE_STEPS)
if duty_ns < 20:
duty_ns = 20
elif duty_ns > 960000:
duty_ns = 960000
pwm.duty_ns(duty_ns)
time.sleep(STEP_DELAY)
except KeyboardInterrupt:
print("\nProgram interrupted by user")
except Exception as e:
print("\nError occurred: %s",repr(e))
finally:
if pwm is not None:
try:
pwm.deinit()
except Exception:
pass
代码说明:
-
导入模块
time:导入标准时间模块来处理延迟(用于控制呼吸效果的速度)。XiaoPWM:从boards.xiao模块导入 PWM(脉宽调制)控制类,用于在数字引脚上生成类似模拟的信号。
-
定义引脚和常量
PIN = 0:指定设备连接到开发板上的引脚 D0。 -FREQ / PERIOD_NS:将 PWM 频率设置为 1000 Hz 并计算以纳秒为单位的总周期(1 秒 / 1000)。FADE_STEPS / STEP_DELAY:配置动画分辨率(255 步)和速度(变化之间等待 0.01 秒)。
-
主逻辑(try 块)
- 初始化:代码在引脚 D0 上初始化 PWM 对象,起始亮度为 0%(占空比)。
- 呼吸循环:在无限的
while True循环内,两个for循环控制 LED 亮度:- 淡入:逐渐将
duty_ns(脉冲宽度)从 0 增加到完整周期持续时间。 - 淡出:逐渐将
duty_ns从完整周期减少回 0。
- 淡入:逐渐将
-
占空比计算:公式
(fade * PERIOD_NS) // FADE_STEPS将循环步骤(0-255)映射到 PWM 硬件所需的纳秒时序。- 安全/清理:
finally块确保在程序停止时(例如通过 Ctrl+C)调用pwm.deinit()来释放硬件资源。
- 安全/清理:
结果图
程序运行后,LED 将实现淡入淡出效果,您可以根据实际需要调整 PWM 步长。

模拟示例
XIAO RA4M1 开发板具有 12 位 ADC,可高分辨率读取模拟传感器值,它可以帮助我们读取更准确的值。
接下来,我们将选择两个传感器来体现 ADC 的特性。
硬件准备
| Seeed Studio XIAO RA4M1 | Seeed Studio Grove Base for XIAO | Grove - Variable Color LED | Grove-Rotary Angle Sensor |
|---|---|---|---|
| | |  |
软件
- 创建一个名为 adc.py 的新文件并将参考代码复制到其中。
import time
from boards.xiao import XiaoPin, XiaoADC, XiaoPWM
adc_pin = 0 #D0
pwm_pin = 9 #D9
try:
adc = XiaoADC(adc_pin)
pwm = XiaoPWM(pwm_pin)
FREQ = 1000
PERIOD_NS = 1000000000 // FREQ
pwm.freq(FREQ)
pwm.duty_ns(0)
MAX_VOLTAGE = 3.3
DEAD_ZONE = 0.02
last_duty = -1
while True:
raw_value = adc.read_u16()
voltage = (raw_value / 65535.0) * MAX_VOLTAGE
# Calculate the base percentage (0.0 - 1.0)
duty_percent = voltage / MAX_VOLTAGE
# scope limitation
if duty_percent < 0: duty_percent = 0
if duty_percent > 1: duty_percent = 1
if abs(duty_percent - last_duty) < DEAD_ZONE:
time.sleep(0.05)
continue
inverted_duty = 1.0 - duty_percent
duty_ns = int(inverted_duty * PERIOD_NS)
if duty_ns < 20: duty_ns = 20
elif duty_ns > (PERIOD_NS * 0.96): duty_ns = int(PERIOD_NS * 0.96)
pwm.duty_ns(duty_ns)
print("Voltage: {:.2f}V, Brightness: {:.1f}%".format(voltage, duty_percent * 100))
last_duty = duty_percent
time.sleep(0.05)
except KeyboardInterrupt:
print("\nProgram interrupted by user")
except Exception as e:
print("\nError occurred: {}".format(e))
finally:
pwm.deinit()
-
导入模块
time:导入标准时间模块来处理延迟(用于控制呼吸效果的速度)。XiaoPWM:从boards.xiao模块导入 PWM(脉宽调制)控制类,用于在数字引脚上生成类似模拟的信号。 代码说明:
-
导入模块
time:导入标准时间模块来处理延迟(用于控制循环的采样率)。XiaoADC、XiaoPWM:从boards.xiao模块导入硬件控制类。XiaoADC处理模拟输入(电位器),XiaoPWM处理脉宽调制输出(LED)。
-
定义引脚和常量
adc_pin = 0/pwm_pin = 1:映射物理引脚。引脚 D0 用于输入传感器,引脚 D1 用于输出 LED。FREQ / PERIOD_NS:将 PWM 工作频率设置为 1000 Hz 并计算以纳秒为单位的周期持续时间(1,000,000 ns)。MAX_VOLTAGE / DEAD_ZONE:定义参考电压(3.3V)和 2% 死区阈值来过滤电气噪声并防止 LED 闪烁。
-
主逻辑(try 块)
- 初始化:设置 ADC 和 PWM 对象。PWM 以占空比 0 开始。
- 控制循环:在
while True循环内,代码持续监控传感器:- 读取和归一化:从 ADC 读取原始 16 位整数(0-65535)并将其转换为浮点电压(0.0V - 3.3V)。
- 抖动过滤器:将当前读数与
last_duty比较。如果变化小于DEAD_ZONE,循环跳过更新以保持稳定性。
-
占空比计算和逻辑反转
- 低电平有效逻辑:行
inverted_duty = 1.0 - duty_percent反转逻辑。 - 原因:您的 LED 可能是低电平有效(连接到 VCC)。
- 效果:随着电压增加,
duty_ns变小(将引脚拉低更长时间),使 LED 更亮。
- 低电平有效逻辑:行
-
安全限制:代码将输出信号限制在最小 20ns 和最大周期的 96% 之间。这保护硬件并确保信号保持在有效范围内。
-
输出和清理
- 反馈:使用
.format()将当前电压和亮度百分比打印到控制台,以兼容较旧的 MicroPython 版本。 - 安全/清理:
finally块确保程序停止时执行pwm.deinit(),安全地关闭 PWM 硬件资源。
- 反馈:使用
结果图
- 旋转 Grove-Rotary Angle Sensor,LED 的亮度将相应改变。

- Shell 窗口也会打印电压和亮度百分比。

UART 示例
UART 是最常用的通信协议之一。它只需两条数据线即可进行数据传输,其低成本使其在许多领域得到广泛应用。接下来,我们将以 GPS 模块数据传输为例来演示串行通信的应用。
硬件准备
软件
- 创建一个名为 uart.py 的新文件,并将参考代码复制到其中。
参考代码
from boards.xiao import XiaoUART
import time
import math
uart = "uart1"
baudrate = 9600
tx = 6 # D6
rx = 7 # D7
# Coordinate structure
class Coordinates:
def __init__(self, Lon=0.0, Lat=0.0):
self.Lon = Lon
self.Lat = Lat
# GPS data structure
class GNRMC:
def __init__(self):
self.Lon = 0.0 # GPS Longitude
self.Lat = 0.0 # GPS Latitude
self.Lon_area = '' # E or W
self.Lat_area = '' # N or S
self.Time_H = 0 # Time Hour
self.Time_M = 0 # Time Minute
self.Time_S = 0 # Time Second
self.Status = 0 # 1: Successful positioning, 0: Positioning failed
# Convert WGS-84 to GCJ-02
def transformLat(x, y):
ret = -100.0 + 2.0 * x + 3.0 * y + 0.2 * y * y + 0.1 * x * y + 0.2 * math.sqrt(abs(x))
ret += (20.0 * math.sin(6.0 * x * pi) + 20.0 * math.sin(2.0 * x * pi)) * 2.0 / 3.0
ret += (20.0 * math.sin(y * pi) + 40.0 * math.sin(y / 3.0 * pi)) * 2.0 / 3.0
ret += (160.0 * math.sin(y / 12.0 * pi) + 320 * math.sin(y * pi / 30.0)) * 2.0 / 3.0
return ret
# Convert WGS-84 to GCJ-02
def transformLon(x, y):
ret = 300.0 + x + 2.0 * y + 0.1 * x * x + 0.1 * x * y + 0.1 * math.sqrt(abs(x))
ret += (20.0 * math.sin(6.0 * x * pi) + 20.0 * math.sin(2.0 * x * pi)) * 2.0 / 3.0
ret += (20.0 * math.sin(x * pi) + 40.0 * math.sin(x / 3.0 * pi)) * 2.0 / 3.0
ret += (150.0 * math.sin(x / 12.0 * pi) + 300.0 * math.sin(x / 30.0 * pi)) * 2.0 / 3.0
return ret
# Convert GCJ-02 to BD-09
def bd_encrypt(gg):
bd = Coordinates()
x = gg.Lon
y = gg.Lat
z = math.sqrt(x * x + y * y) + 0.00002 * math.sin(y * x_pi)
theta = math.atan2(y, x) + 0.000003 * math.cos(x * x_pi)
bd.Lon = z * math.cos(theta) + 0.0065
bd.Lat = z * math.sin(theta) + 0.006
return bd
# Convert WGS-84 to GCJ-02
def transform(gps):
gg = Coordinates()
dLat = transformLat(gps.Lon - 105.0, gps.Lat - 35.0)
dLon = transformLon(gps.Lon - 105.0, gps.Lat - 35.0)
radLat = gps.Lat / 180.0 * pi
magic = math.sin(radLat)
magic = 1 - ee * magic * magic
sqrtMagic = math.sqrt(magic)
dLat = (dLat * 180.0) / ((a * (1 - ee)) / (magic * sqrtMagic) * pi)
dLon = (dLon * 180.0) / (a / sqrtMagic * math.cos(radLat) * pi)
gg.Lat = gps.Lat + dLat
gg.Lon = gps.Lon + dLon
return gg
# Convert to Baidu coordinates (BD-09)
def L76X_Baidu_Coordinates(gps):
wgs84_coords = Coordinates(gps.Lon, gps.Lat)
gcj02_coords = transform(wgs84_coords)
bd09_coords = bd_encrypt(gcj02_coords)
return bd09_coords
# Convert to Google coordinates (GCJ-02)
def L76X_Google_Coordinates(gps):
wgs84_coords = Coordinates(gps.Lon, gps.Lat)
gcj02_coords = transform(wgs84_coords)
return gcj02_coords
# Parse GNRMC NMEA sentence
def parse_gnrmc(nmea_sentence):
gps = GNRMC()
if not nmea_sentence.startswith(b'$GNRMC') and not nmea_sentence.startswith(b'$PNRMC'):
return gps
try:
# Convert to string and split by commas
sentence_str = nmea_sentence.decode('ascii', 'ignore')
fields = sentence_str.split(',')
if len(fields) < 12:
return gps
# Parse time field (HHMMSS.sss)
if fields[1]:
time_str = fields[1]
if '.' in time_str:
time_str = time_str.split('.')[0]
if len(time_str) >= 6:
gps.Time_H = int(time_str[0:2]) + 8 # GMT+8
gps.Time_M = int(time_str[2:4])
gps.Time_S = int(time_str[4:6])
if gps.Time_H >= 24:
gps.Time_H -= 24
# Parse status
gps.Status = 1 if fields[2] == 'A' else 0
if gps.Status == 1:
# Parse latitude (DDMM.MMMMM)
if fields[3] and fields[4]:
lat_str = fields[3]
if '.' in lat_str:
degrees = float(lat_str[0:2])
minutes = float(lat_str[2:])
gps.Lat = degrees + minutes / 60.0
gps.Lat_area = fields[4]
# Parse longitude (DDDMM.MMMMM)
if fields[5] and fields[6]:
lon_str = fields[5]
if '.' in lon_str:
degrees = float(lon_str[0:3])
minutes = float(lon_str[3:])
gps.Lon = degrees + minutes / 60.0
gps.Lon_area = fields[6]
except Exception as e:
print("Parse error:", e)
return gps
# Print formatted GPS data
def print_gps_data(gps):
print("\n--- GPS Data ---")
print("Time (GMT+8): {:02d}:{:02d}:{:02d}".format(gps.Time_H, gps.Time_M, gps.Time_S))
if gps.Status == 1:
print("Latitude (WGS-84): {:.6f} {}".format(gps.Lat, gps.Lat_area))
print("Longitude (WGS-84): {:.6f} {}".format(gps.Lon, gps.Lon_area))
# Coordinate conversion
baidu_coords = L76X_Baidu_Coordinates(gps)
google_coords = L76X_Google_Coordinates(gps)
print("Baidu Latitude: {:.6f}".format(baidu_coords.Lat))
print("Baidu Longitude: {:.6f}".format(baidu_coords.Lon))
print("Google Latitude: {:.6f}".format(google_coords.Lat))
print("Google Longitude: {:.6f}".format(google_coords.Lon))
print("GPS positioning successful.")
else:
print("GPS positioning failed or no valid data.")
try:
uart = XiaoUART(uart, baudrate, tx, rx)
# Initialize UART
uart.init(9600, bits=8, parity=None, stop=1)
# Buffer to accumulate complete messages
buffer = bytearray()
# Constants for coordinate transformation
pi = 3.14159265358979324
a = 6378245.0
ee = 0.00669342162296594323
x_pi = 3.14159265358979324 * 3000.0 / 180.0
while True:
available = uart.any()
if available > 0:
# Read all available bytes
data = uart.read(available)
buffer.extend(data)
# Check if we have a complete line (ends with newline)
if b'\n' in buffer:
# Find the newline position
newline_pos = buffer.find(b'\n')
# Extract the complete message
complete_message = buffer[:newline_pos + 1]
# Remove the processed part from buffer
buffer = buffer[newline_pos + 1:]
# Parse GNRMC sentences
if complete_message.startswith(b'$GNRMC') or complete_message.startswith(b'$PNRMC'):
gps_data = parse_gnrmc(complete_message)
print_gps_data(gps_data)
except KeyboardInterrupt:
print("\nProgram interrupted by user")
except Exception as e:
print("\nError occurred: %s" % {e})
finally:
uart.deinit()
代码说明:
-
导入模块
XiaoUART从boards.xiao模块导入 Seeed Xiao 开发板的 UART 通信类,用于初始化和控制串行通信。time导入时间模块以支持与时间相关的功能(虽然这里没有直接使用,但为了潜在的未来使用或兼容性而导入)。math导入坐标变换算法所需的数学函数(sin、cos、sqrt、atan2等)。
-
定义 UART 配置
uart = "uart1"指定要使用的 UART 控制器实例——这里是uart1。baudrate = 9600将串行通信的波特率设置为 9600 bps。tx = 6指定 UART 发送引脚(TX)连接到数字引脚 D6。rx = 7指定 UART 接收引脚(RX)连接到数字引脚 D7。
-
定义数据结构
Coordinates类:一个简单的容器,用于将经度/纬度值存储为浮点数。GNRMC类:表示从$GNRMCNMEA 语句解析的 GPS 数据。包含:- 十进制度数的纬度/经度
- 半球指示符(
N/S、E/W) - 时间(小时、分钟、秒——调整为 GMT+8)
- 状态标志(1 = 有效定位,0 = 无定位)
-
坐标转换函数
transformLat(x, y)和transformLon(x, y)—— 实现 WGS-84 → GCJ-02 转换算法部分的辅助函数(在中国用于地图混淆)。bd_encrypt(gg)—— 通过应用额外的偏移和旋转,将 GCJ-02 坐标转换为百度的 BD-09 坐标系统。transform(gps)—— 使用基于椭球地球模型的复杂三角函数公式,将 WGS-84(原始 GPS)坐标转换为 GCJ-02 的主函数。L76X_Baidu_Coordinates(gps)—— 将原始 GPS(WGS-84)→ GCJ-02 → BD-09(百度地图格式)转换的包装器。L76X_Google_Coordinates(gps)—— 将原始 GPS(WGS-84)→ GCJ-02(中国的谷歌地图格式)转换的包装器。
-
解析 GNRMC 语句
parse_gnrmc(nmea_sentence)—— 将原始 NMEA$GNRMC或$PNRMC字符串解析为结构化的GNRMC对象。- 提取时间(从 UTC 转换为 GMT+8)。
- 检查状态(
A= 活动/有效定位,V= 无效)。 - 从 DDMM.MMMMM 格式解析纬度/经度 → 十进制度数。
- 返回填充的
GNRMC对象,如果解析失败则返回默认空对象。
-
显示格式化的 GPS 数据
print_gps_data(gps)—— 打印人类可读的 GPS 信息,包括:- 本地时间(GMT+8)
- 带半球的原始 WGS-84 坐标
- 转换后的 GCJ-02(谷歌兼容)和 BD-09(百度兼容)坐标
- 指示定位是否成功的状态消息
-
主逻辑(try 块)
- 使用指定参数初始化 UART 接口。
- 定义坐标数学所需的全局常量(
pi、a、ee、x_pi)—— 地球椭球参数和缩放因子。 - 进入无限循环以通过 UART 连续读取传入的 GPS 数据。
- 使用
buffer累积部分消息,直到接收到完整行(以\n结尾)。 - 当完整行到达时:
- 检查是否以
$GNRMC或$PNRMC开头 - 如果是,使用
parse_gnrmc()解析它 - 通过
print_gps_data()显示格式化输出
- 检查是否以
- 使用
- 处理异常:
KeyboardInterrupt:在 Ctrl+C 时优雅退出。- 一般
Exception:捕获并打印任何意外错误。
- 最后,调用
uart.deinit()在退出前清理 UART 资源。
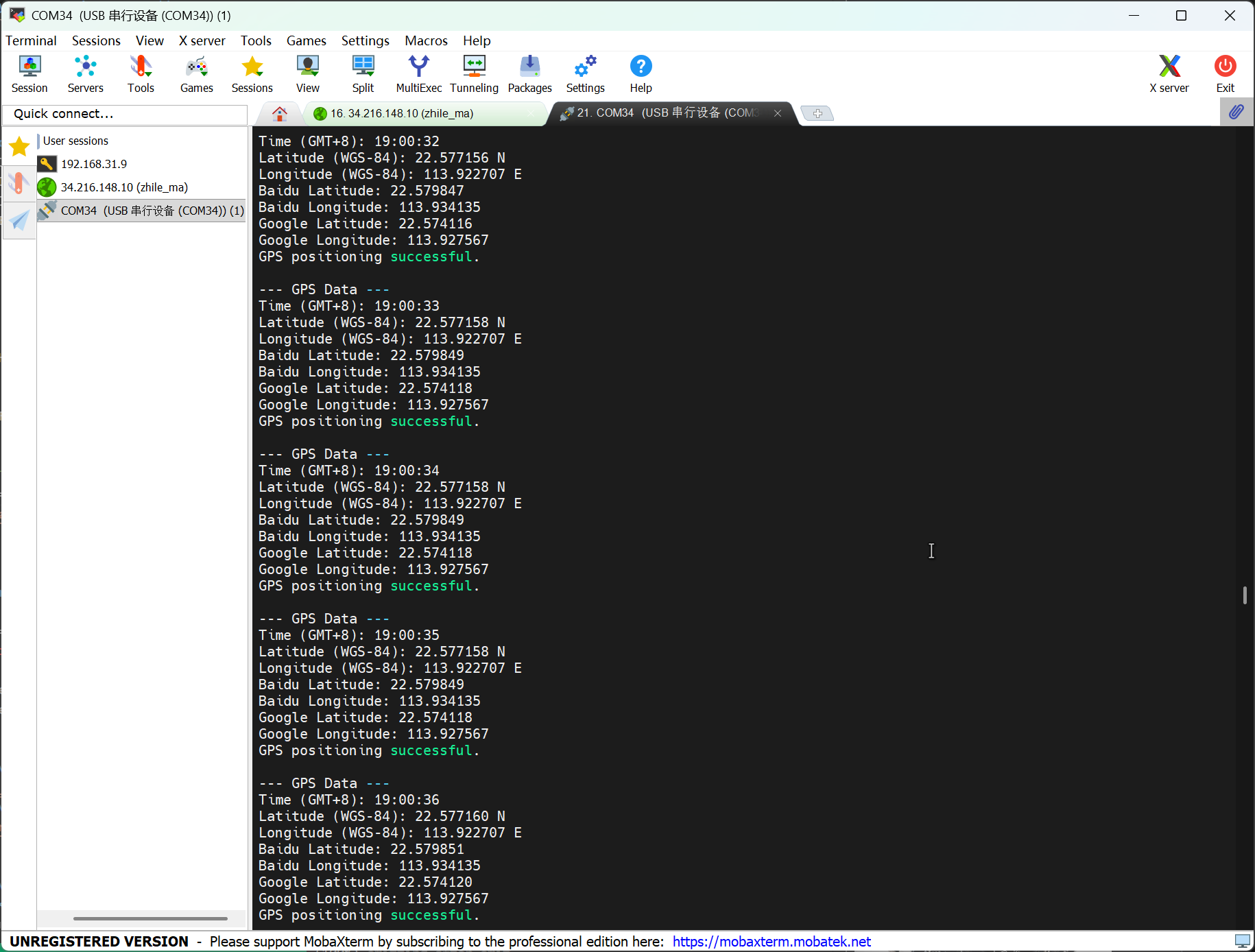
结果图
- 打开任何串口工具并将波特率设置为 9600。
- GPS 模块应在开阔的室外区域使用。
- 程序将打印您位置的 GPS 信息。
I2C 示例
XIAO RAM41 具有 I2C 接口,可用于许多传感器的数据传输和解析,以及使用 OLED 屏幕。
硬件准备
| Seeed Studio XIAO RA4M1 | Seeed Studio Expansion Base for XIAO with Grove OLED |
|---|---|
|  |
软件
- 创建一个名为 i2c.py 的新文件,并将参考代码复制到其中。
参考代码
import time
from boards.xiao import XiaoI2C
sda = 4 #D4
scl = 5 #D5
i2c = "i2c0"
frq = 400000
i2c = XiaoI2C(i2c, sda, scl, frq)
# Basic 8x8 font
font_data = {
' ': [0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00],
'D': [0x78,0x44,0x42,0x42,0x42,0x44,0x78,0x00],
'E': [0x7C,0x40,0x40,0x78,0x40,0x40,0x7C,0x00],
'H': [0x44,0x44,0x44,0x7C,0x44,0x44,0x44,0x00],
'L': [0x40,0x40,0x40,0x40,0x40,0x40,0x7C,0x00],
'O': [0x3C,0x42,0x42,0x42,0x42,0x42,0x3C,0x00],
'R': [0x7C,0x42,0x42,0x7C,0x48,0x44,0x42,0x00],
'W': [0x42,0x42,0x42,0x42,0x5A,0x66,0x42,0x00],
}
# Write a single command byte to SSD1306 via I2C
def ssd1306_write_command(cmd):
i2c.writeto(0x3C, bytes([0x00, cmd]))
# Write multiple command bytes to SSD1306 via I2C
def ssd1306_write_commands(cmds):
data = bytearray([0x00] + list(cmds))
i2c.writeto(0x3C, data)
# Write display data bytes to SSD1306 via I2C
def ssd1306_write_data(data):
buffer = bytearray(len(data) + 1)
buffer[0] = 0x40
buffer[1:] = data
i2c.writeto(0x3C, buffer)
# Clear the entire SSD1306 display
def ssd1306_clear():
ssd1306_write_commands(bytearray([0x21, 0, 127]))
ssd1306_write_commands(bytearray([0x22, 0, 7]))
empty_data = bytearray(128)
for _ in range(8):
ssd1306_write_data(empty_data)
ssd1306_write_commands([0x21, 0, 127])
# Initialize SSD1306 display with recommended settings
def ssd1306_init():
commands = [
bytearray([0xAE]),
bytearray([0xD5, 0x80]),
bytearray([0xA8, 63]),
bytearray([0xD3, 0x00]),
bytearray([0x40]),
bytearray([0x8D, 0x14]),
bytearray([0x20, 0x00]),
bytearray([0xA1]),
bytearray([0xC8]),
bytearray([0xDA, 0x12]),
bytearray([0x81, 0xCF]),
bytearray([0xD9, 0xF1]),
bytearray([0xDB, 0x40]),
bytearray([0xA4]),
bytearray([0xA6]),
bytearray([0xAF])
]
for cmd in commands:
ssd1306_write_commands(cmd)
ssd1306_clear()
print("SSD1306 initialized successfully")
ssd1306_write_commands([0x21, 0, 127])
# Draw a string of text at specified column and page (row) on SSD1306
def ssd1306_draw_text(text, x, y):
ssd1306_write_commands(bytearray([0x21, x, x + len(text) * 8 - 1]))
ssd1306_write_commands(bytearray([0x22, y, y + 0]))
display_data = bytearray()
for char in text:
font_bytes = font_data.get(char.upper(), font_data[' '])
for col in range(7, -1, -1):
val = 0
for row in range(8):
if font_bytes[row] & (1 << col):
val |= (1 << row)
display_data.append(val)
ssd1306_write_data(display_data)
try:
i2c_addr = i2c.scan()
if 0x3C not in i2c_addr:
raise Exception("SSD1306 not found on I2C bus")
else:
print("SSD1306 found on I2C bus: 0x3C")
# Initialize display
ssd1306_init()
ssd1306_draw_text("HELLO WORLD", 20, 4)
while True:
time.sleep(1)
except KeyboardInterrupt:
print("\nProgram interrupted by user")
except Exception as e:
print("\nError occurred: %s" % {e})
代码说明:
-
导入模块
time:导入标准时间模块以处理程序暂停和延迟(这里用于while循环休眠)。XiaoI2C:从boards.xiao导入硬件特定的 I2C 类,该类处理 XIAO 开发板的低级通信协议。
-
定义 I2C 配置
sda = 4、scl = 5:分别将 I2C 数据(SDA)和时钟(SCL)线分配给数字引脚 D4 和 D5。 -i2c = "i2c0":选择微控制器上的特定硬件 I2C 外设总线(总线 0)。frq = 400000:将通信速度设置为 400 kHz(快速模式),允许快速屏幕更新。i2c = XiaoI2C(...):使用定义的引脚配置和频率设置实例化 I2C 对象。
-
定义字体数据
font_data:一个充当查找表的字典。它将字符(如 'H'、'E')映射到 8 个十六进制字节的列表。这些字节表示该字符在 8x8 网格中的像素位掩码。
-
辅助函数(低级驱动程序)
ssd1306_write_command(cmd):向显示器发送单个控制指令。它在字节前加上0x00,告诉 SSD1306 控制器后续字节是命令,而不是像素数据。ssd1306_write_commands(cmds):在单个 I2C 事务中高效发送一系列设置命令,以最小化开销。ssd1306_write_data(data):向屏幕 RAM 发送图形数据。它在数据前加上0x40前缀,表示后续字节代表要点亮的像素。
-
辅助函数(高级控制)
ssd1306_clear():清除屏幕内容。它设置列地址(0-127)和页地址(0-7)以覆盖整个屏幕,然后向每个内存位置写入零(空白像素)。ssd1306_init():发送严格的十六进制代码序列(例如,0xAE表示显示关闭,0x8D 0x14表示电荷泵启用)来配置 OLED 面板的电压、扫描方向和寻址模式,然后将其打开。ssd1306_draw_text(text, x, y):核心图形函数。- 它使用命令
0x21(列地址)和0x22(页地址)在屏幕上设置绘图窗口。 - 它遍历输入字符串,检索字体字节,并执行位运算(
val |= (1 << row))来转置/旋转数据以匹配 SSD1306 的特定内存结构。
-
主逻辑(执行流程)
i2c.scan():检测连接到 I2C 总线的所有设备,以确保接线正确。- 地址验证:检查显示器是否存在于地址
0x3C。如果未找到,它会引发错误以停止执行;否则,它会打印确认信息。 ssd1306_init():唤醒显示器并应用配置设置。ssd1306_draw_text("HELLO WORLD", 20, 4):在第 4 页(大约屏幕中左位置)的像素列 20 处开始渲染文本 "HELLO WORLD"。while True:进入无限循环,重复休眠 1 秒,保持程序运行以使显示器保持活动状态。try...except:将主逻辑包装在错误处理程序中,以捕获问题(如缺少硬件)或用户中断(Ctrl+C),确保程序优雅退出并显示可读消息。
结果图
- 程序开始运行后,它将在屏幕上显示 HELLO WORLD。

总结
恭喜!完成上述教程后,您已经掌握了使用 XIAO RA4M1 和 MicroPython 进行基本开发和调试的能力。我们期待看到您基于这些基础技能创建更多有趣的项目
技术支持与产品讨论
感谢您选择我们的产品!我们在这里为您提供不同的支持,以确保您使用我们产品的体验尽可能顺畅。我们提供多种沟通渠道,以满足不同的偏好和需求。