Damiao 43 Series Motors Getting Start
This article will introduce how to get started with Damiao 43 series motors and how to use them with C++ and Python on the reComputer Mini Jetson Orin.

Specification
Here's the completed table with all parameters filled in for all motor models:
| Motor Model | Rated Torque (Nm) | Peak Torque (Nm) | No-load Speed (rpm) | Rated Speed (rpm) | Reduction Ratio | Size Diameter*Height (mm) | Weight (g) | Supply Voltage (V) | Recommended Voltage Range (V) | Rated Phase Current (A) | Peak Phase Current (A) | Rated Power (W) | Pole Pairs | Communication Method | Encoder Type | Installation | Phase Resistance (Ω) | Phase Inductance (uH) | Flux Linkage (Wb) | Rotational Inertia (Kg*m²) | Torque Constant (Nm/A) | Drive Max Current (A) | Speed Loop KP | Default PMAX (rad) | Default VMAX (rad/s) | Default TMAX (Nm) | Speed Constant |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| J4310-2EC V1.1 | 3 | 7 | 200 | 120 | 10 | 57 * 46 | ~300 | 24 | 15-32 | 3.7 | 7.2 | 37.699112 | 14 | CAN, CANFD | Magnetic, Dual | Built-in | 0.85 | 345 | 0.0045 | 1.80E-05 | 0.945 | 10.261194 | 3.72E-04 | 12.5 | 30 | 10 | 87.512523 |
| J4310-2EC V1.1(48V) | 3 | 7 | 400 | 120 | 10 | 57 * 46 | ~300 | 48 | 15-52 | 3.7 | 7.2 | 37.699112 | 14 | CAN, CANFD | Magnetic, Dual | Built-in | 0.85 | 345 | 0.0045 | 1.80E-05 | 0.945 | 10.261194 | 3.72E-04 | 12.5 | 30 | 10 | 87.512523 |
| J4340-2EC | 9 | 27 | 52.5 | 36 | 40 | 57 * 53.3 | ~362 | 24 | 15-32 | 3 | 8 | 33.929201 | 14 | CAN, CANFD | Magnetic, Dual | Built-in | 0.88 | 360 | 0.00485 | 2.00E-05 | 4.074 | 10.261194 | 9.59E-05 | 12.5 | 8 | 28 | 81.197186 |
| J4340-2EC(48V) | 9 | 27 | 100 | 36 | 40 | 57 * 53.3 | ~362 | 48 | 15-52 | 2.5 | 9 | 33.929201 | 14 | CAN, CANFD | Magnetic, Dual | Built-in | 0.88 | 360 | 0.00485 | 2.00E-05 | 4.074 | 10.261194 | 9.59E-05 | 12.5 | 8 | 28 | 81.197186 |
| J4340P-2EC | 9 | 27 | 52.5 | 36 | 40 | 57 * 56.5 | ~375 | 24 | 15-32 | 3 | 8 | 33.929201 | 14 | CAN, CANFD | Magnetic, Dual | Built-in | 0.88 | 360 | 0.00485 | 2.00E-05 | 4.074 | 10.261194 | 9.59E-05 | 12.5 | 8 | 28 | 81.197186 |
| J4340P-2EC(48V) | 9 | 27 | 100 | 36 | 40 | 57 * 56.5 | ~375 | 48 | 15-52 | 2.5 | 9 | 33.929201 | 14 | CAN, CANFD | Magnetic, Dual | Built-in | 0.88 | 360 | 0.00485 | 2.00E-05 | 4.074 | 10.261194 | 9.59E-05 | 12.5 | 8 | 28 | 81.197186 |
Main Features
- CAN BUS & CANFD
- Dual Encoder
- High Torque Density
- High Precision
- Hollow Design
Getting Start
Environmental Preparation Before Use
Windows System in PC
- Download the Download the Damiao Debugging Tools.
- Downlaod the USB2CAN Tools
Connect the Circuit to PC
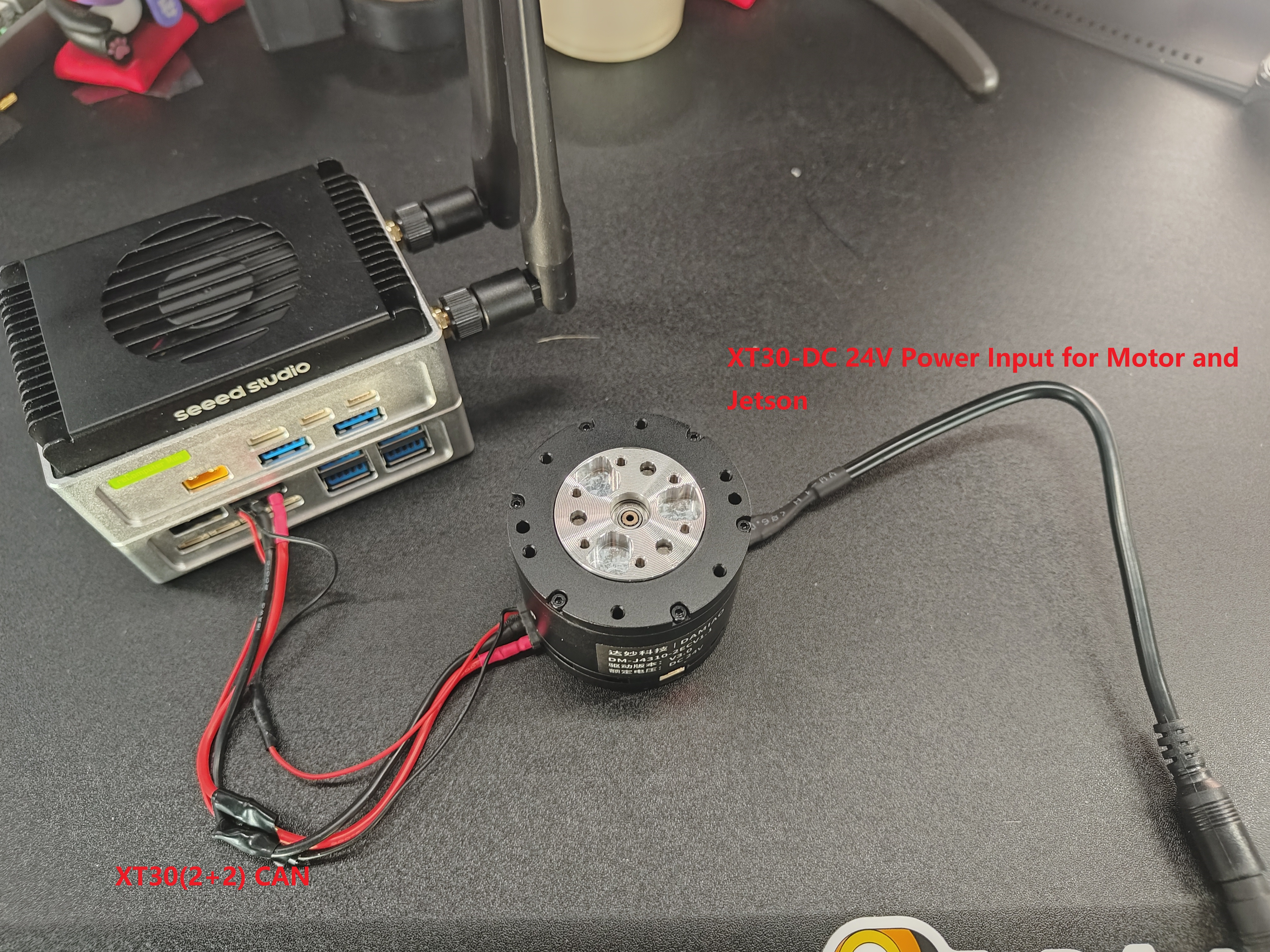
We use the CAN communication method, which requires an additional USB-CAN interface for debugging via an upper computer on Windows.
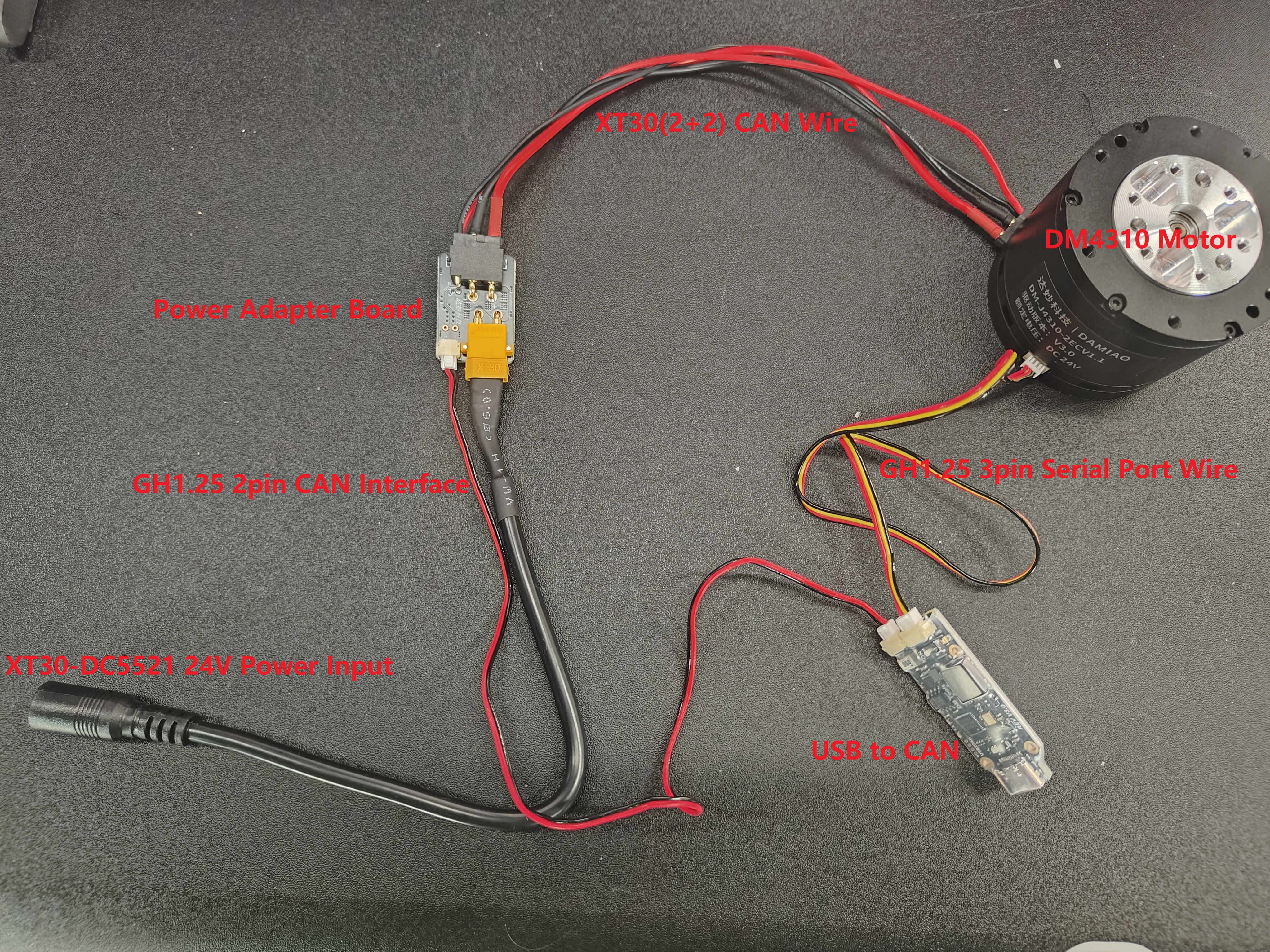
Here, you need to provide a separate 24V power supply for the motor and connect the USB to your computer.
Use the Debugging_Tools_v.1.6.8.8.exe to Test the Motor
You can switch between Chinese and English at the bottom of the app.
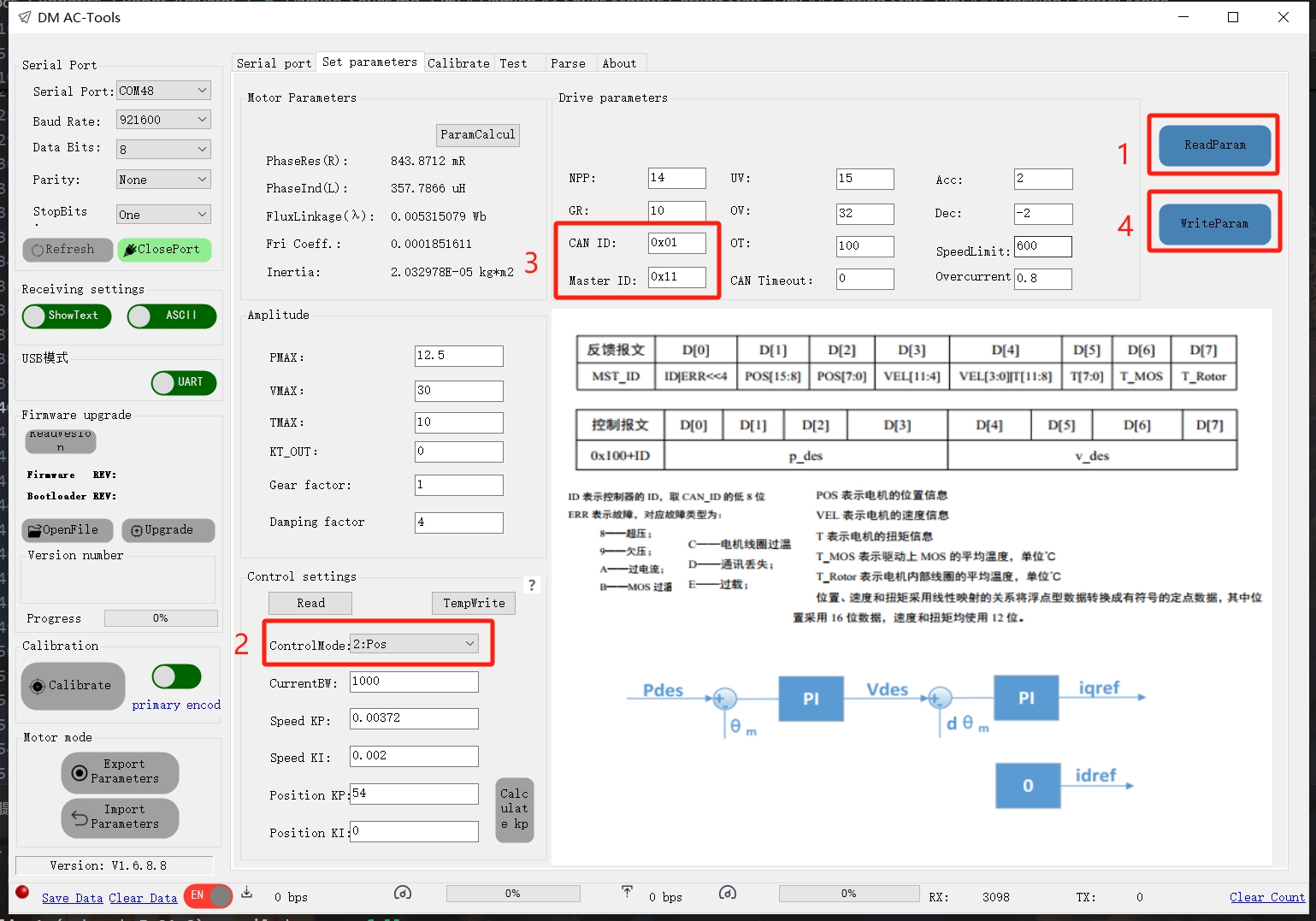
| Configure serial port connection parameters | connect to motor | Read Param | Set CAN ID | Write Param. |
|---|---|---|---|---|
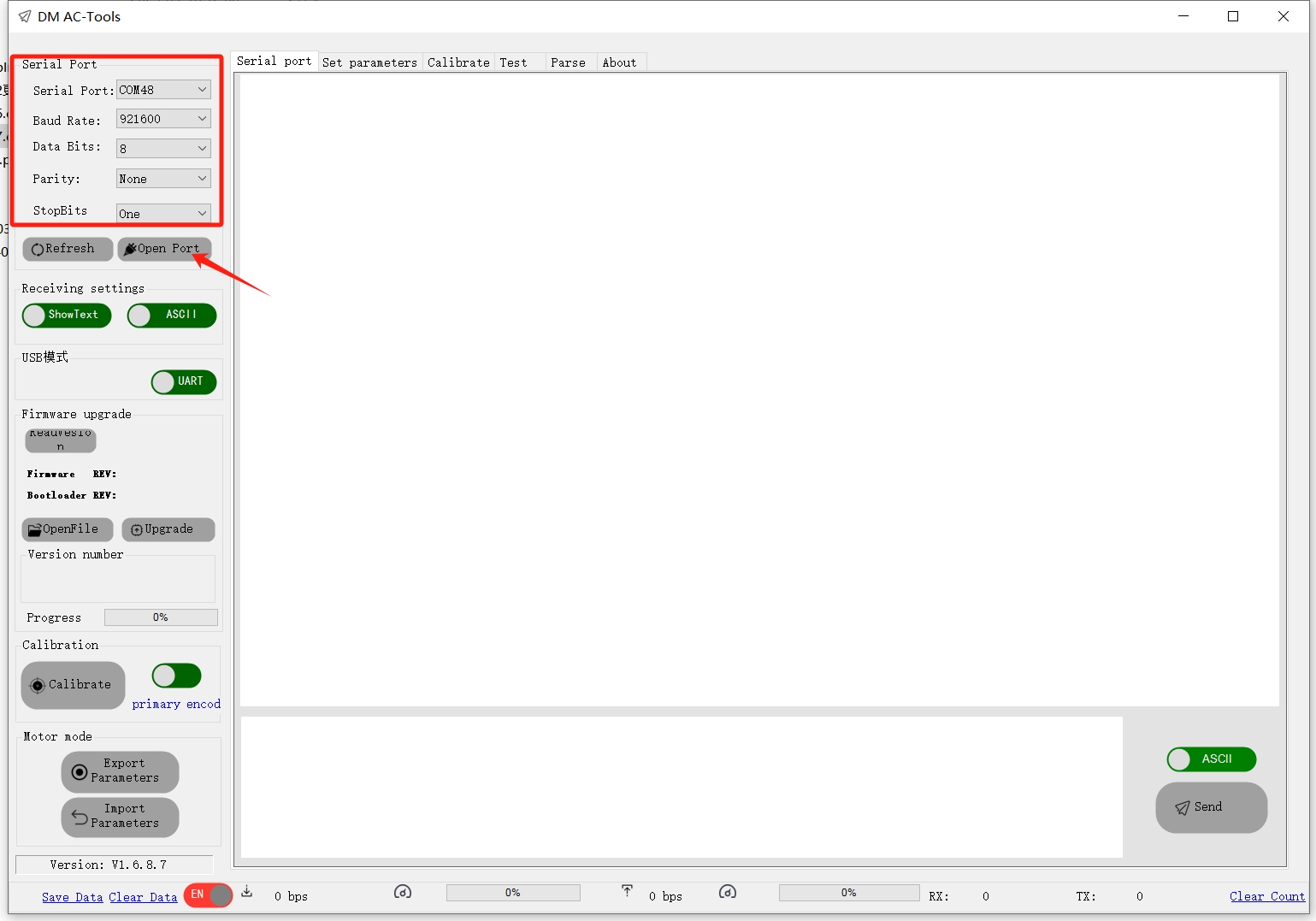 |  |  |  |  |
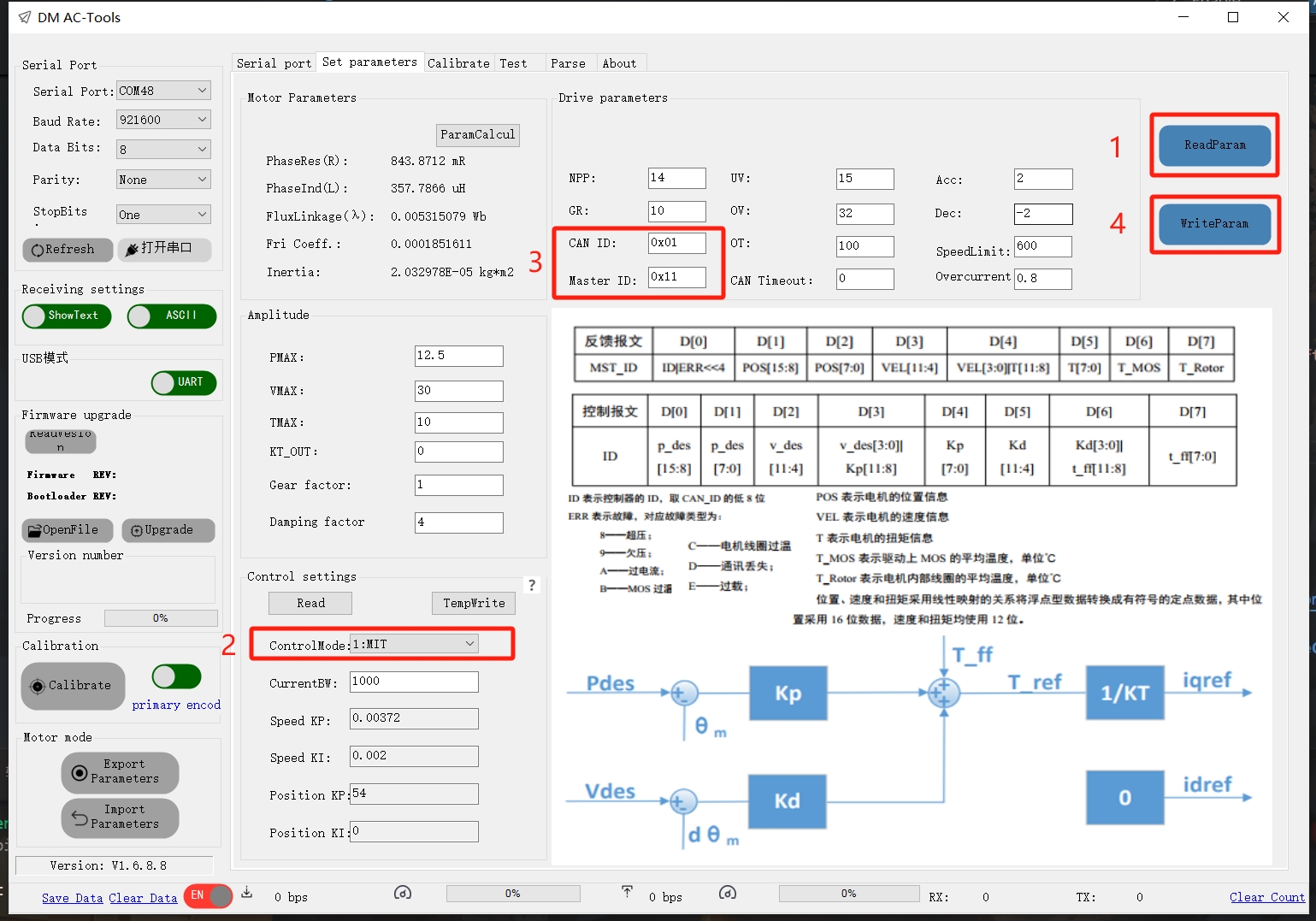
| For the Serial Port, use the port automatically recognized by the computer, with all other settings as defaults. | After clicking the 'Open Port' button, it will automatically connect to the host computer. If this is the first connection, motor information will be printed in the dialog box | In the 'Set Parameters' section, clicking 'Read Param' will display the motor's current detailed information and motion mode. | Here, please first configure the CAN ID. | After configuration, click 'Write Param' to update the parameters. |
CAN_ID: The frame ID used by the drive to receive CAN commands (hexadecimal).
Master ID: The frame ID used by the drive to send feedback (hexadecimal).
The Master ID is the host ID. It is recommended to set unique Master IDs for each motor.
A good practice is to set the Master ID higher than the CAN_ID by 0x10 (e.g., if CAN_ID = 0x01, Master ID = 0x11).
Example:
Motor 1: CAN_ID = 0x01, Master ID = 0x11
Motor 2: CAN_ID = 0x02, Master ID = 0x12
Do not set Master ID to 0x00!!!
(1) Basic Parameters
- NPP: The number of motor pole pairs, automatically determined through calibration.
- UV: If the supply voltage drops below the threshold (minimum 15V), the drive will stop operating.
- OV: Sets the upper voltage limit. The drive checks the supply voltage at power-up and disables operation if exceeded (checked only once at startup).
- Acc/Dec: Used in non-MIT modes to limit the rate of speed change.
- GR(Gear Ratio): Affects output speed/position and indirectly influences torque feedback. Supports floating-point values.
- OT: Coil temperature threshold (recommended ≤ 100°C). Exceeding this triggers fault mode (disables motor and reports error).
- CAN_ID: Frame ID for receiving CAN commands (hexadecimal).
- Master ID: Frame ID for drive feedback (hexadecimal). Best practice: Set
MasterID = CAN_ID + 0x10(e.g.,0x01→0x11). Never set to0x00. - CAN Timeout: 32-bit integer defining the timeout period (units: 50µs cycles). Motor enters protection mode if no CAN commands are detected within this interval.
- Speed Limit (Speed mode only): Maximum speed before deceleration (units: rad/s).
- Overcurrent: Maximum phase current limit (percentage).
(2) Motor Parameters
- Automatically identified by the drive. Recalibration required when replacing the drive board. Stored persistently in the drive.
(3) Command Scaling (Amplitude Settings)
- PMAX: In MIT mode, scales command input; in other modes, scales feedback output. Refer to CAN protocol for mapping rules.
- VMAX: Same as PMAX.
- TMAX: Same as PMAX.
- KT_OUT: Motor torque constant. Set to 0 if motor parameters are accurately identified.
- Gear Ratio Coefficient: Torque transmission ratio for gears.
Note: The drive uses the MIT communication protocol format.
(4) Control Settings
- Control Modes:
- MIT Mode
- Position-Velocity Mode (trapezoidal acceleration/deceleration)
- Velocity Mode
- Current Bandwidth: Current loop gain (default:
1000). - Speed KP/KI, Position KP/KI: PID parameters for speed and position loops.
MIT Control Mode
1. MIT Torque Control Mode:
- In the Set Parameters section, click Read Param to display current motor parameters.
- Set the Control Mode to MIT Mode.
- Verify the configured CAN ID.
- Click Write Param to save all settings.
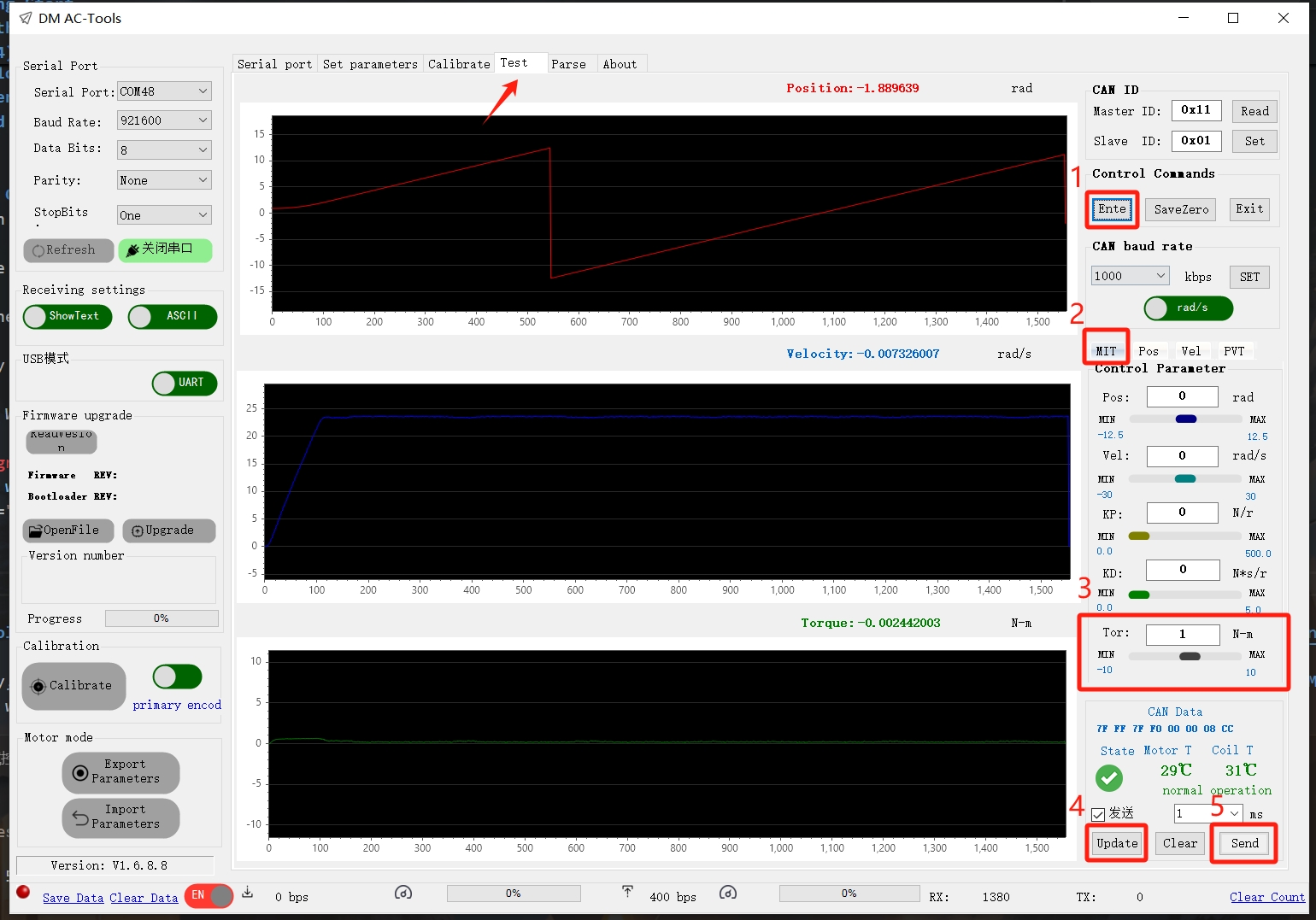
- In the Test tab, click the **"Enable Motor"** button (Ente).
- In the MIT Control section:
- Set Torque (Nm) to 1.
- Click Update → Send.
The motor will start rotating.
You can also copy the CAN data (in hexadecimal format) and use a serial port debugging tool to drive the motor.

2. MIT Speed Control Mode:
- In the Test tab, click the **"Enable Motor"** button (Ente).
- In the MIT Control section:
- Set Vel (rad/s) to 5.
- Set KD (N*s/r) to 1.
- Click Update → Send.
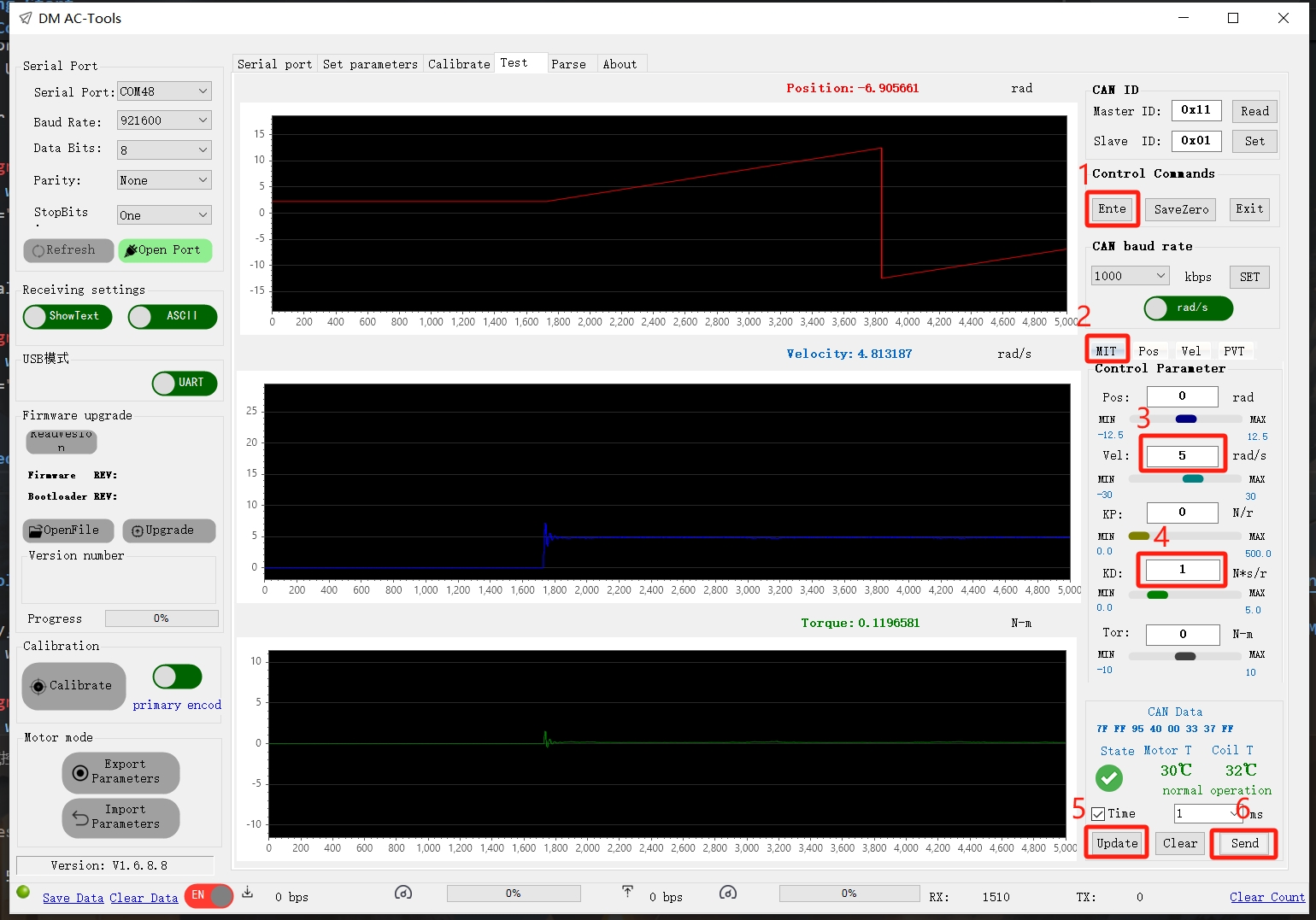
The motor will start rotating. You can also copy the CAN data (in hexadecimal format) and use a serial port debugging tool to drive the motor.
3. MIT Position Control Mode:
- In the Test tab, click the **"Enable Motor"** button (Ente).
- You can use **"SaveZero"** to set the current position as the zero point.
- In the MIT Control section:
- Set Pos (rad) to 3.14.
- Set KP (N/r) to 2.
- Set KD (N*s/r) to 1.
- Click Update → Send.
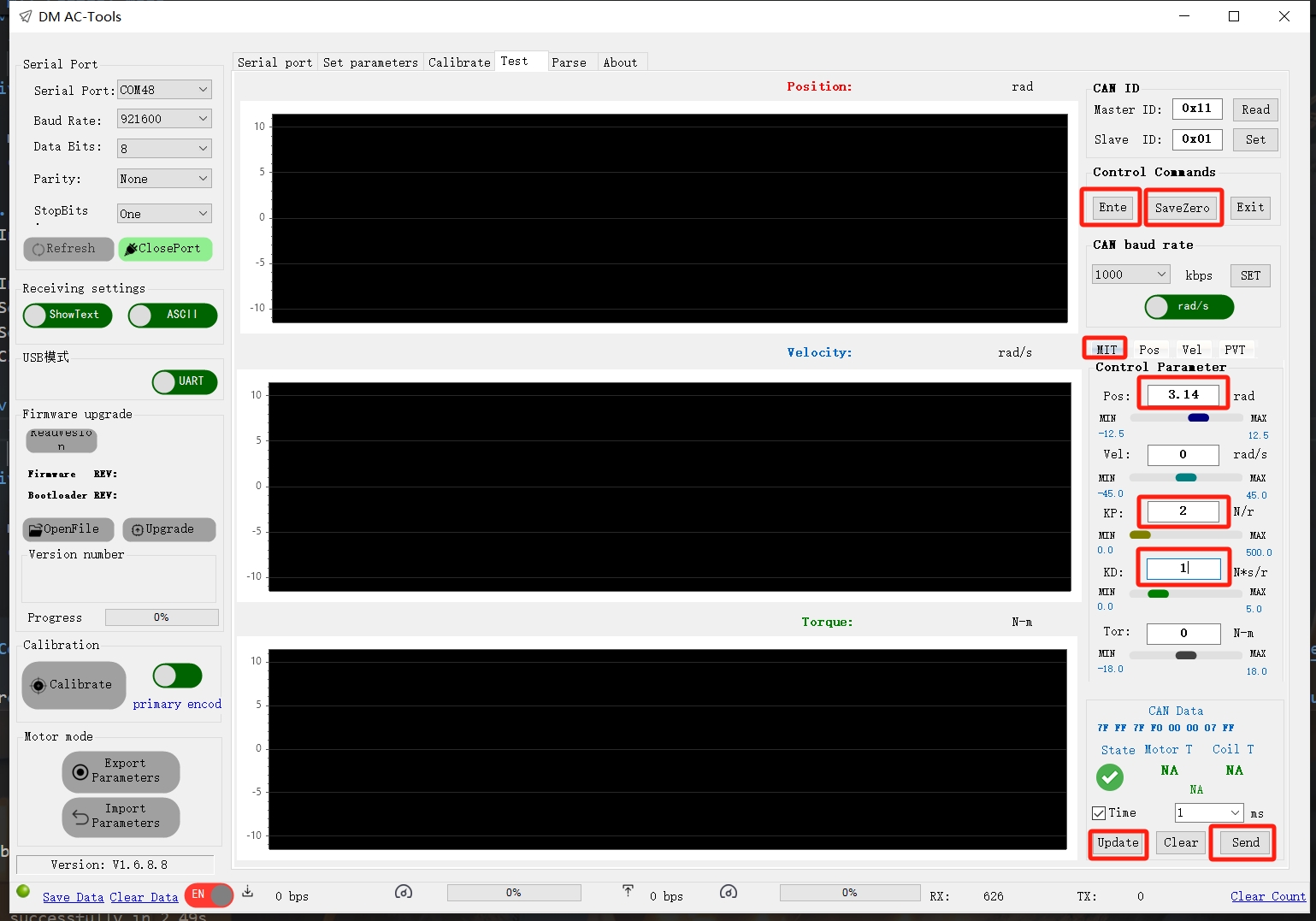
The motor will start rotating. You can also copy the CAN data (in hexadecimal format) and use a serial port debugging tool to drive the motor.
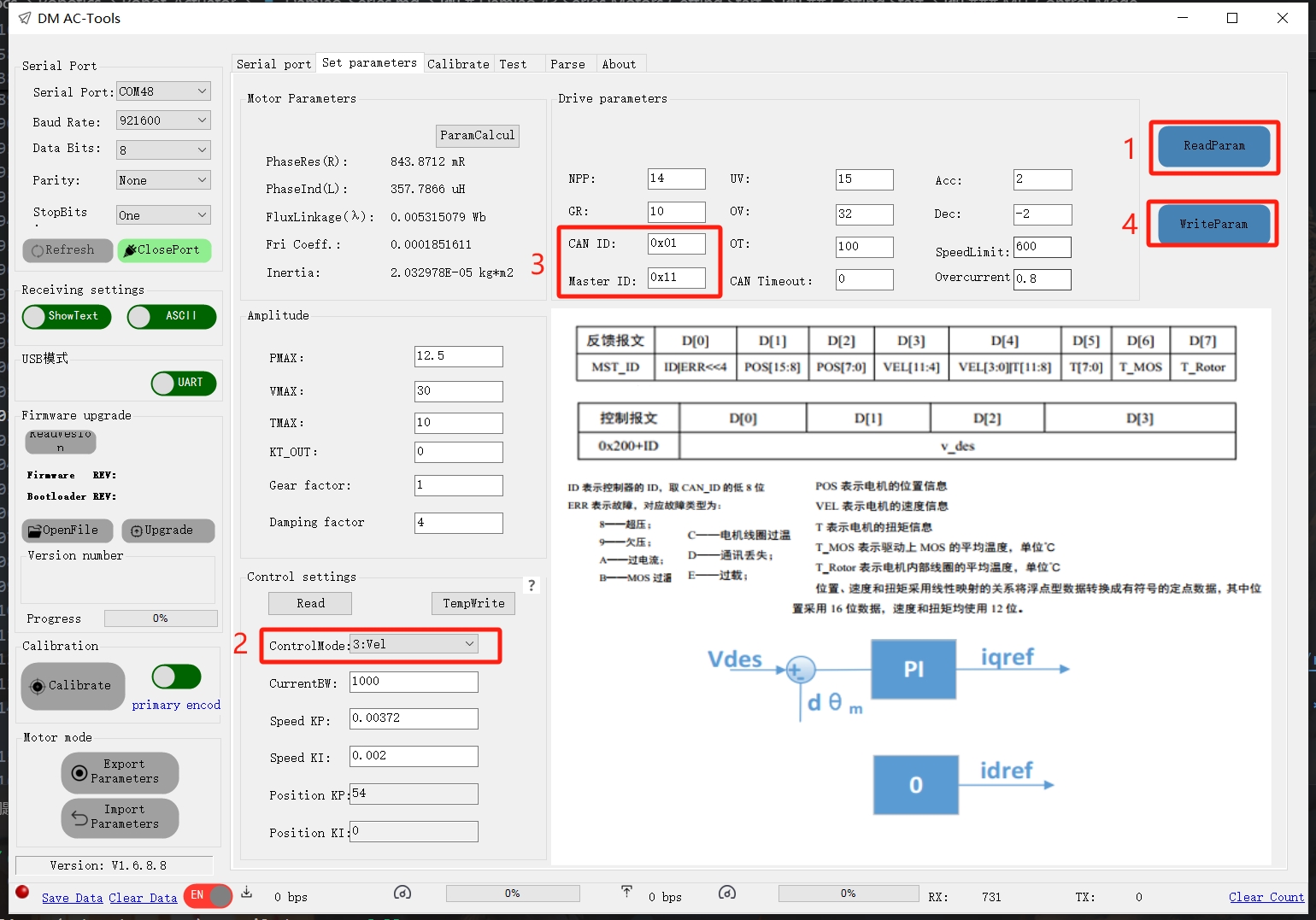
Speed Control Mode
- In the Set Parameters section, click Read Param to display current motor parameters.
- Set the Control Mode to Vel Mode.
- Verify the configured CAN ID.
- Click Write Param to save all settings.
- In the Test tab, click the **"Enable Motor"** button (Ente).
- In the Vel Control section:
- Set Vel (rad/s) to 5.
- Click Update → Send.
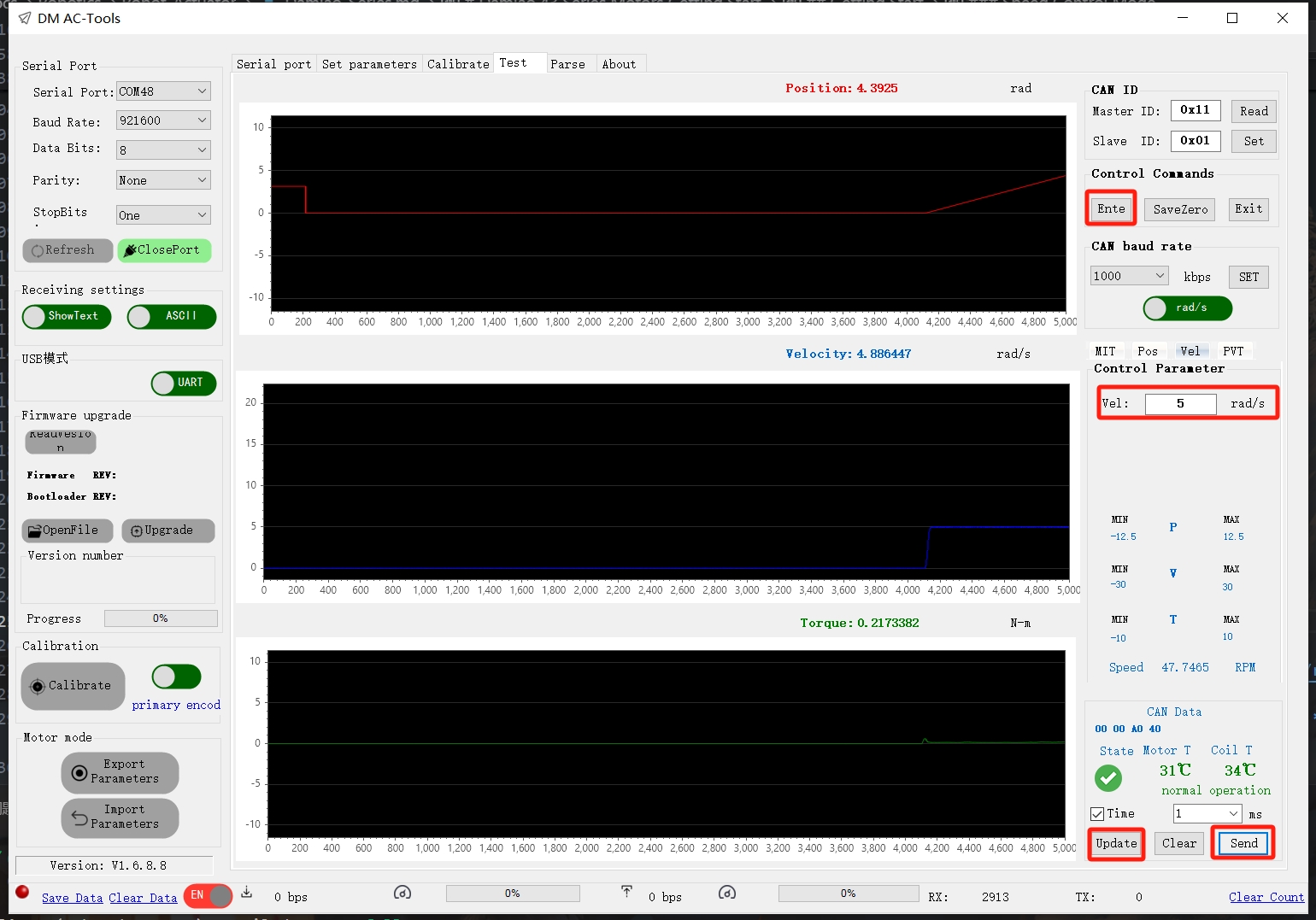
The motor will start rotating. You can also copy the CAN data (in hexadecimal format) and use a serial port debugging tool to drive the motor.
Position Control Mode
- In the Set Parameters section, click Read Param to display current motor parameters.
- Set the Control Mode to Pos Mode.
- Verify the configured CAN ID.
- Click Write Param to save all settings.
- In the Test tab, click the **"Enable Motor"** button (Ente).
- In the Pos Control section:
- Set Pos to 3.14.
- Set Vel (rad/s) to 5.
- Click Update → Send.
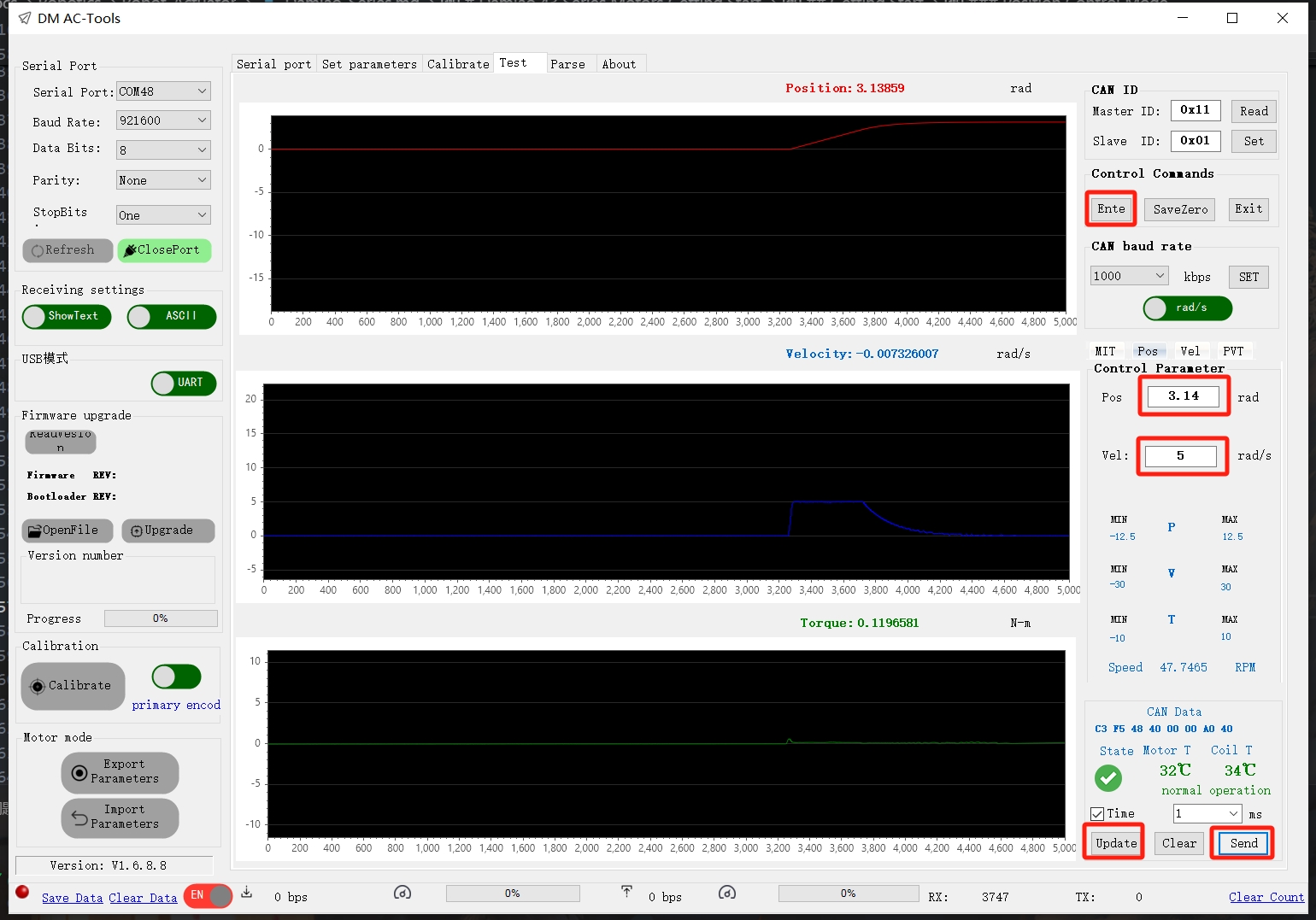
The motor will start rotating. You can also copy the CAN data (in hexadecimal format) and use a serial port debugging tool to drive the motor.
Control the Motor Using the reComputer Mini Jetson Orin
Currently, the most common CAN communication interfaces for motors in the market use XT30 (2+2) and JST connectors. Our reComputer Mini Jetson Orin and reComputer Robotics device is equipped with dual XT30 (2+2) ports and JST-based CAN interfaces, providing seamless compatibility.
reComputer Mini:

reComputer Robotics

For more details on CAN usage, you can refer to this wiki.
Enable CAN Interfaces
Step1: Before using CAN0 and CAN1, please remove the bottom cover and set both 120Ω termination resistors to the ON position.

Step2: Connect the motor directly to the reComputer Mini CAN0 via the XT30 (2+2) interface.
For the reComputer Mini's CAN interface, the H/L pins are inverted compared to the motor's H/L. Therefore, you need to reverse the H/L connections in the XT30 2+2 cable harness.

This power supply is only for single-motor learning and testing. For multiple motors, please design a separate power board and isolate the Jetson's power supply from the motor power supply to avoid high current passing directly through the Jetson.
Enable Jetson CAN communication
Open a terminal and enter the following command to pull the GPIO pin high and activate CAN0:
gpioset --mode=wait 0 43=0
If you are using the JST-interface CAN1, pull pin 106 high.
gpioset --mode=wait 0 106=0
Keep this terminal open, launch a new terminal, and configure CAN0.
sudo modprobe mttcan
sudo ip link set can0 type can bitrate 1000000
sudo ip link set can0 up
For C++ Examples
Installation and Compilation
- Install CMake
sudo apt update
sudo apt install cmake
- Install CAN Tools
sudo apt install can-utils
- Download and Compile the Program
- Create a workspace and clone the repository:
mkdir -p ~/orin_ws/src
cd ~/orin_ws/src
git clone https://gitee.com/xauter/orin-control.git
- Compile:
cd ~/orin_ws/src/orin-control/dm_hw
mkdir build
cd build
cmake ..
make
Usage
- Check CAN Devices
Open a terminal and run:
ip -brief link | grep can
- Run the Program
In the build folder, execute:
cd ~/orin_ws/src/orin-control/dm_hw/build
./dm_main
The motor will light up green and rotate at a sinusoidal speed.
Control Using Python
- Install Python Environment
pip install python-can numpy
- Create a folder named scripts under the directory
~/damiao/scriptsto store Python scripts.
mkdir -p ~/damiao/scripts
- Create the damiao_motor.py file
cd ~/damiao/scripts
touch damiao_motor.py
Copy the following code to damiao_motor.py
damiao_motor.py
## This is a derivative of the following software.
## https://github.com/cmjang/DM_Control_Python/blob/main/DM_CAN.py
import can
from time import sleep, time
import numpy as np
from enum import IntEnum
from struct import unpack
from struct import pack
class Motor:
def __init__(self, MotorType, SlaveID, MasterID):
"""
define Motor object 定义电机对象
:param MotorType: Motor type 电机类型
:param SlaveID: CANID 电机ID
:param MasterID: MasterID 主机ID 建议不要设为0
"""
self.Pd = float(0)
self.Vd = float(0)
self.goal_position = float(0)
self.goal_tau = float(0)
self.state_q = float(0)
self.state_dq = float(0)
self.state_tau = float(0)
self.state_tmos = int(0)
self.state_trotor = int(0)
self.SlaveID = SlaveID
self.MasterID = MasterID
self.MotorType = MotorType
self.isEnable = False
self.NowControlMode = Control_Type.MIT
self.temp_param_dict = {}
def recv_data(self, q: float, dq: float, tau: float, tmos: int, trotor: int):
self.state_q = q
self.state_dq = dq
self.state_tau = tau
self.state_tmos = tmos
self.state_trotor = trotor
def getPosition(self):
"""
get the position of the motor 获取电机位置
:return: the position of the motor 电机位置
"""
return self.state_q
def getVelocity(self):
"""
get the velocity of the motor 获取电机速度
:return: the velocity of the motor 电机速度
"""
return self.state_dq
def getTorque(self):
"""
get the torque of the motor 获取电机力矩
:return: the torque of the motor 电机力矩
"""
return self.state_tau
def getParam(self, RID):
"""
get the parameter of the motor 获取电机内部的参数,需要提前读取
:param RID: DM_variable 电机参数
:return: the parameter of the motor 电机参数
"""
if RID in self.temp_param_dict:
return self.temp_param_dict[RID]
else:
return None
class MotorControl:
#send_data_frame = np.array(
# [0x55, 0xAA, 0x1e, 0x03, 0x01, 0x00, 0x00, 0x00, 0x0a, 0x00, 0x00, 0x00, 0x00, 0, 0, 0, 0, 0x00, 0x08, 0x00,
# 0x00, 0, 0, 0, 0, 0, 0, 0, 0, 0x00], np.uint8)
# 4310 4310_48 4340 4340_48
Limit_Param = [[12.5, 30, 10], [12.5, 50, 10], [12.5, 8, 28], [12.5, 10, 28],
# 6006 8006 8009 10010L 10010
[12.5, 45, 20], [12.5, 45, 40], [12.5, 45, 54], [12.5, 25, 200], [12.5, 20, 200],
# H3510 DMG62150 DMH6220
[12.5 , 280 , 1],[12.5 , 45 , 10],[12.5 , 45 , 10]]
def __init__(self, channel: str, bitrate: int = 1000000):
"""
define MotorControl object 定义电机控制对象
:param serial_device: serial object 串口对象
"""
#self.serial_ = serial_device
self.motors_map = dict()
self.data_save = bytes() # save data
#if self.serial_.is_open: # open the serial port
# print("Serial port is open")
# serial_device.close()
#self.serial_.open()
self.canbus = can.interface.Bus(channel=channel, interface='socketcan', bitrate=bitrate)
#print("can is open")
def controlMIT(self, DM_Motor, kp: float, kd: float, q: float, dq: float, tau: float):
"""
MIT Control Mode Function 达妙电机MIT控制模式函数
:param DM_Motor: Motor object 电机对象
:param kp: kp
:param kd: kd
:param q: position 期望位置
:param dq: velocity 期望速度
:param tau: torque 期望力矩
:return: None
"""
if DM_Motor.SlaveID not in self.motors_map:
print("controlMIT ERROR : Motor ID not found")
return
kp_uint = float_to_uint(kp, 0, 500, 12)
kd_uint = float_to_uint(kd, 0, 5, 12)
MotorType = DM_Motor.MotorType
Q_MAX = self.Limit_Param[MotorType][0]
DQ_MAX = self.Limit_Param[MotorType][1]
TAU_MAX = self.Limit_Param[MotorType][2]
q_uint = float_to_uint(q, -Q_MAX, Q_MAX, 16)
dq_uint = float_to_uint(dq, -DQ_MAX, DQ_MAX, 12)
tau_uint = float_to_uint(tau, -TAU_MAX, TAU_MAX, 12)
data_buf = np.array([0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00], np.uint8)
data_buf[0] = (q_uint >> 8) & 0xff
data_buf[1] = q_uint & 0xff
data_buf[2] = dq_uint >> 4
data_buf[3] = ((dq_uint & 0xf) << 4) | ((kp_uint >> 8) & 0xf)
data_buf[4] = kp_uint & 0xff
data_buf[5] = kd_uint >> 4
data_buf[6] = ((kd_uint & 0xf) << 4) | ((tau_uint >> 8) & 0xf)
data_buf[7] = tau_uint & 0xff
self.__send_data(DM_Motor.SlaveID, data_buf)
self.recv() # receive the data from serial port
def control_delay(self, DM_Motor, kp: float, kd: float, q: float, dq: float, tau: float, delay: float):
"""
MIT Control Mode Function with delay 达妙电机MIT控制模式函数带延迟
:param DM_Motor: Motor object 电机对象
:param kp: kp
:param kd: kd
:param q: position 期望位置
:param dq: velocity 期望速度
:param tau: torque 期望力矩
:param delay: delay time 延迟时间 单位秒
"""
self.controlMIT(DM_Motor, kp, kd, q, dq, tau)
sleep(delay)
def control_Pos_Vel(self, Motor, P_desired: float, V_desired: float):
"""
control the motor in position and velocity control mode 电机位置速度控制模式
:param Motor: Motor object 电机对象
:param P_desired: desired position 期望位置
:param V_desired: desired velocity 期望速度
:return: None
"""
if Motor.SlaveID not in self.motors_map:
print("Control Pos_Vel Error : Motor ID not found")
return
motorid = 0x100 + Motor.SlaveID
data_buf = np.array([0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00], np.uint8)
P_desired_uint8s = float_to_uint8s(P_desired)
V_desired_uint8s = float_to_uint8s(V_desired)
data_buf[0:4] = P_desired_uint8s
data_buf[4:8] = V_desired_uint8s
self.__send_data(motorid, data_buf)
self.recv() # receive the data from serial port
def control_Vel(self, Motor, Vel_desired):
"""
control the motor in velocity control mode 电机速度控制模式
:param Motor: Motor object 电机对象
:param Vel_desired: desired velocity 期望速度
"""
if Motor.SlaveID not in self.motors_map:
print("control_VEL ERROR : Motor ID not found")
return
motorid = 0x200 + Motor.SlaveID
data_buf = np.array([0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00], np.uint8)
Vel_desired_uint8s = float_to_uint8s(Vel_desired)
data_buf[0:4] = Vel_desired_uint8s
self.__send_data(motorid, data_buf)
self.recv() # receive the data from serial port
def control_pos_force(self, Motor, Pos_des: float, Vel_des, i_des):
"""
control the motor in EMIT control mode 电机力位混合模式
:param Pos_des: desired position rad 期望位置 单位为rad
:param Vel_des: desired velocity rad/s 期望速度 为放大100倍
:param i_des: desired current rang 0-10000 期望电流标幺值放大10000倍
电流标幺值:实际电流值除以最大电流值,最大电流见上电打印
"""
if Motor.SlaveID not in self.motors_map:
print("control_pos_vel ERROR : Motor ID not found")
return
motorid = 0x300 + Motor.SlaveID
data_buf = np.array([0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00], np.uint8)
Pos_desired_uint8s = float_to_uint8s(Pos_des)
data_buf[0:4] = Pos_desired_uint8s
Vel_uint = np.uint16(Vel_des)
ides_uint = np.uint16(i_des)
data_buf[4] = Vel_uint & 0xff
data_buf[5] = Vel_uint >> 8
data_buf[6] = ides_uint & 0xff
data_buf[7] = ides_uint >> 8
self.__send_data(motorid, data_buf)
self.recv() # receive the data from serial port
def enable(self, Motor):
"""
enable motor 使能电机
最好在上电后几秒后再使能电机
:param Motor: Motor object 电机对象
"""
self.__control_cmd(Motor, np.uint8(0xFC))
sleep(0.1)
self.recv() # receive the data from serial port
def enable_old(self, Motor ,ControlMode):
"""
enable motor old firmware 使能电机旧版本固件,这个是为了旧版本电机固件的兼容性
可恶的旧版本固件使能需要加上偏移量
最好在上电后几秒后再使能电机
:param Motor: Motor object 电机对象
"""
data_buf = np.array([0xff, 0xff, 0xff, 0xff, 0xff, 0xff, 0xff, 0xfc], np.uint8)
enable_id = ((int(ControlMode)-1) << 2) + Motor.SlaveID
self.__send_data(enable_id, data_buf)
sleep(0.1)
self.recv() # receive the data from serial port
def disable(self, Motor):
"""
disable motor 失能电机
:param Motor: Motor object 电机对象
"""
self.__control_cmd(Motor, np.uint8(0xFD))
sleep(0.1)
self.recv() # receive the data from serial port
def set_zero_position(self, Motor):
"""
set the zero position of the motor 设置电机0位
:param Motor: Motor object 电机对象
"""
self.__control_cmd(Motor, np.uint8(0xFE))
sleep(0.1)
self.recv() # receive the data from serial port
def recv(self):
# 把上次没有解析完的剩下的也放进来
# data_recv = b''.join([self.data_save, self.serial_.read_all()])
#data_recv = b''.join([self.data_save, self.canbus.recv()])
# packets = self.__extract_packets(data_recv)
# for packet in packets:
# data = packet[7:15]
# CANID = (packet[6] << 24) | (packet[5] << 16) | (packet[4] << 8) | packet[3]
# CMD = packet[1]
# self.__process_packet(data, CANID, CMD)
data_recv = self.canbus.recv(0.1)
if data_recv is not None:
# data = data_recv.data
# err = data[0] >> 12
# id = data[0] & 0x7f
# pos = (data[1] << 8) + data[2]
# vel = (data[3] << 4) + (data[4] >> 4)
# tau = ((data[4] & 0x0f) << 8) + data[5]
# t_mos = data[6]
# t_rotor = data[7]
# print(hex(id), err, id, pos, vel, tau, goal_tau, t_mos, t_rotor)
# CANID = data_recv.arbitration_id
CANID = data_recv.data[0]
# CMD = data_recv.data[3]
CMD = 0x11 # 飯田:修正の必要あり
self.__process_packet(data_recv.data, CANID, CMD)
# 飯田:Debug print
# print(hex(CANID),hex(CMD))
# print(hex(data_recv.data[0]),hex(data_recv.data[1]),hex(data_recv.data[2]),hex(data_recv.data[3]),hex(data_recv.data[4]),hex(data_recv.data[5]),hex(data_recv.data[6]),hex(data_recv.data[7]))
#return data
def recv_set_param_data(self):
#data_recv = self.serial_.read_all()
# packets = self.__extract_packets(data_recv)
# for packet in packets:
# data = packet[7:15]
# CANID = (packet[6] << 24) | (packet[5] << 16) | (packet[4] << 8) | packet[3]
# CMD = packet[1]
# self.__process_set_param_packet(data, CANID, CMD)
data_recv = self.canbus.recv(0.1)
if data_recv is not None:
data = data_recv.data
CANID = data_recv.arbitration_id
# CANID = data_recv.data[0]
# CMD = data_recv.data[3]
CMD = 0x11 # 飯田:修正の必要あり
self.__process_packet(data, CANID, CMD)
# 飯田:Debug print
print(hex(CANID),hex(CMD))
print(hex(data_recv.data[0]),hex(data_recv.data[1]),hex(data_recv.data[2]),hex(data_recv.data[3]),hex(data_recv.data[4]),hex(data_recv.data[5]),hex(data_recv.data[6]),hex(data_recv.data[7]))
def __process_packet(self, data, CANID, CMD):
if CMD == 0x11:
if CANID != 0x00:
if CANID in self.motors_map:
q_uint = np.uint16((np.uint16(data[1]) << 8) | data[2])
dq_uint = np.uint16((np.uint16(data[3]) << 4) | (data[4] >> 4))
tau_uint = np.uint16(((data[4] & 0xf) << 8) | data[5])
t_mos = data[6]
t_rotor = data[7]
MotorType_recv = self.motors_map[CANID].MotorType
Q_MAX = self.Limit_Param[MotorType_recv][0]
DQ_MAX = self.Limit_Param[MotorType_recv][1]
TAU_MAX = self.Limit_Param[MotorType_recv][2]
recv_q = uint_to_float(q_uint, -Q_MAX, Q_MAX, 16)
recv_dq = uint_to_float(dq_uint, -DQ_MAX, DQ_MAX, 12)
recv_tau = uint_to_float(tau_uint, -TAU_MAX, TAU_MAX, 12)
self.motors_map[CANID].recv_data(recv_q, recv_dq, recv_tau, t_mos, t_rotor)
else:
MasterID=data[0] & 0x0f
if MasterID in self.motors_map:
q_uint = np.uint16((np.uint16(data[1]) << 8) | data[2])
dq_uint = np.uint16((np.uint16(data[3]) << 4) | (data[4] >> 4))
tau_uint = np.uint16(((data[4] & 0xf) << 8) | data[5])
t_mos = data[6]
t_rotor = data[7]
MotorType_recv = self.motors_map[MasterID].MotorType
Q_MAX = self.Limit_Param[MotorType_recv][0]
DQ_MAX = self.Limit_Param[MotorType_recv][1]
TAU_MAX = self.Limit_Param[MotorType_recv][2]
recv_q = uint_to_float(q_uint, -Q_MAX, Q_MAX, 16)
recv_dq = uint_to_float(dq_uint, -DQ_MAX, DQ_MAX, 12)
recv_tau = uint_to_float(tau_uint, -TAU_MAX, TAU_MAX, 12)
self.motors_map[MasterID].recv_data(recv_q, recv_dq, recv_tau, t_mos, t_rotor)
def __process_set_param_packet(self, data, CANID, CMD):
if CMD == 0x11 and (data[2] == 0x33 or data[2] == 0x55):
masterid=CANID
slaveId = ((data[1] << 8) | data[0])
if CANID==0x00: #防止有人把MasterID设为0稳一手
masterid=slaveId
if masterid not in self.motors_map:
if slaveId not in self.motors_map:
return
else:
masterid=slaveId
RID = data[3]
# 读取参数得到的数据
if is_in_ranges(RID):
#uint32类型
num = uint8s_to_uint32(data[4], data[5], data[6], data[7])
self.motors_map[masterid].temp_param_dict[RID] = num
else:
#float类型
num = uint8s_to_float(data[4], data[5], data[6], data[7])
self.motors_map[masterid].temp_param_dict[RID] = num
def addMotor(self, Motor):
"""
add motor to the motor control object 添加电机到电机控制对象
:param Motor: Motor object 电机对象
"""
self.motors_map[Motor.SlaveID] = Motor
if Motor.MasterID != 0:
self.motors_map[Motor.MasterID] = Motor
return True
def __control_cmd(self, Motor, cmd: np.uint8): # 飯田:コマンドは通ります
data_buf = np.array([0xff, 0xff, 0xff, 0xff, 0xff, 0xff, 0xff, cmd], np.uint8)
self.__send_data(Motor.SlaveID, data_buf)
def __send_data(self, motor_id, data):
"""
send data to the motor 发送数据到电机
:param motor_id:
:param data:
:return:
"""
#self.send_data_frame[13] = motor_id & 0xff
#self.send_data_frame[14] = (motor_id >> 8)& 0xff #id high 8 bits
#self.send_data_frame[21:29] = data
#self.serial_.write(bytes(self.send_data_frame.T))
msg =can.Message(is_extended_id=False,arbitration_id=motor_id,data=data,is_remote_frame = False)
self.canbus.send(msg)
def __read_RID_param(self, Motor, RID): # 飯田:修正の必要あり?
can_id_l = Motor.SlaveID & 0xff #id low 8 bits
can_id_h = (Motor.SlaveID >> 8)& 0xff #id high 8 bits
data_buf = np.array([np.uint8(can_id_l), np.uint8(can_id_h), 0x33, np.uint8(RID), 0x00, 0x00, 0x00, 0x00], np.uint8)
self.__send_data(0x7FF, data_buf)
def __write_motor_param(self, Motor, RID, data): # 飯田:修正の必要あり?
can_id_l = Motor.SlaveID & 0xff #id low 8 bits
can_id_h = (Motor.SlaveID >> 8)& 0xff #id high 8 bits
data_buf = np.array([np.uint8(can_id_l), np.uint8(can_id_h), 0x55, np.uint8(RID), 0x00, 0x00, 0x00, 0x00], np.uint8)
if not is_in_ranges(RID):
# data is float
data_buf[4:8] = float_to_uint8s(data)
else:
# data is int
data_buf[4:8] = data_to_uint8s(int(data))
self.__send_data(0x7FF, data_buf)
def switchControlMode(self, Motor, ControlMode):
"""
switch the control mode of the motor 切换电机控制模式
:param Motor: Motor object 电机对象
:param ControlMode: Control_Type 电机控制模式 example:MIT:Control_Type.MIT MIT模式
"""
max_retries = 20
retry_interval = 0.1 #retry times
RID = 10
self.__write_motor_param(Motor, RID, np.uint8(ControlMode))
for _ in range(max_retries):
sleep(retry_interval)
self.recv_set_param_data()
if Motor.SlaveID in self.motors_map:
if RID in self.motors_map[Motor.SlaveID].temp_param_dict:
if abs(self.motors_map[Motor.SlaveID].temp_param_dict[RID] - ControlMode) < 0.1:
return True
else:
return False
return False
def save_motor_param(self, Motor):
"""
save the all parameter to flash 保存所有电机参数
:param Motor: Motor object 电机对象
:return:
"""
can_id_l = Motor.SlaveID & 0xff #id low 8 bits
can_id_h = (Motor.SlaveID >> 8)& 0xff #id high 8 bits
data_buf = np.array([np.uint8(can_id_l), np.uint8(can_id_h), 0xAA, 0x00, 0x00, 0x00, 0x00, 0x00], np.uint8)
self.disable(Motor) # before save disable the motor
self.__send_data(0x7FF, data_buf)
sleep(0.001)
def change_limit_param(self, Motor_Type, PMAX, VMAX, TMAX):
"""
change the PMAX VMAX TMAX of the motor 改变电机的PMAX VMAX TMAX
:param Motor_Type:
:param PMAX: 电机的PMAX
:param VMAX: 电机的VMAX
:param TMAX: 电机的TMAX
:return:
"""
self.Limit_Param[Motor_Type][0] = PMAX
self.Limit_Param[Motor_Type][1] = VMAX
self.Limit_Param[Motor_Type][2] = TMAX
def refresh_motor_status(self,Motor):
"""
get the motor status 获得电机状态
"""
can_id_l = Motor.SlaveID & 0xff #id low 8 bits
can_id_h = (Motor.SlaveID >> 8) & 0xff #id high 8 bits
data_buf = np.array([np.uint8(can_id_l), np.uint8(can_id_h), 0xCC, 0x00, 0x00, 0x00, 0x00, 0x00], np.uint8)
self.__send_data(0x7FF, data_buf)
self.recv() # receive the data from serial port
def change_motor_param(self, Motor, RID, data):
"""
change the RID of the motor 改变电机的参数
:param Motor: Motor object 电机对象
:param RID: DM_variable 电机参数
:param data: 电机参数的值
:return: True or False ,True means success, False means fail
"""
max_retries = 20
retry_interval = 0.05 #retry times
self.__write_motor_param(Motor, RID, data)
for _ in range(max_retries):
self.recv_set_param_data()
if Motor.SlaveID in self.motors_map and RID in self.motors_map[Motor.SlaveID].temp_param_dict:
if abs(self.motors_map[Motor.SlaveID].temp_param_dict[RID] - data) < 0.1:
return True
else:
return False
sleep(retry_interval)
return False
def read_motor_param(self, Motor, RID):
"""
read only the RID of the motor 读取电机的内部信息例如 版本号等
:param Motor: Motor object 电机对象
:param RID: DM_variable 电机参数
:return: 电机参数的值
"""
max_retries = 5
retry_interval = 0.05 #retry times
self.__read_RID_param(Motor, RID)
for _ in range(max_retries):
sleep(retry_interval)
self.recv_set_param_data()
if Motor.SlaveID in self.motors_map:
if RID in self.motors_map[Motor.SlaveID].temp_param_dict:
return self.motors_map[Motor.SlaveID].temp_param_dict[RID]
return None
# -------------------------------------------------
# Extract packets from the serial data
def __extract_packets(self, data):
frames = []
header = 0xAA
tail = 0x55
frame_length = 16
i = 0
remainder_pos = 0
while i <= len(data) - frame_length:
if data[i] == header and data[i + frame_length - 1] == tail:
frame = data[i:i + frame_length]
frames.append(frame)
i += frame_length
remainder_pos = i
else:
i += 1
self.data_save = data[remainder_pos:]
return frames
def LIMIT_MIN_MAX(x, min_val, max_val):
return max(min_val, min(x, max_val))
def float_to_uint(x: float, x_min: float, x_max: float, bits):
x = LIMIT_MIN_MAX(x, x_min, x_max)
span = x_max - x_min
data_norm = (x - x_min) / span
return np.uint16(data_norm * ((1 << bits) - 1))
def uint_to_float(x: np.uint16, min: float, max: float, bits):
span = max - min
data_norm = float(x) / ((1 << bits) - 1)
temp = data_norm * span + min
return np.float32(temp)
def float_to_uint8s(value):
# Pack the float into 4 bytes
packed = pack('f', value)
# Unpack the bytes into four uint8 values
return unpack('4B', packed)
def data_to_uint8s(value):
# Check if the value is within the range of uint32
if isinstance(value, int) and (0 <= value <= 0xFFFFFFFF):
# Pack the uint32 into 4 bytes
packed = pack('I', value)
else:
raise ValueError("Value must be an integer within the range of uint32")
# Unpack the bytes into four uint8 values
return unpack('4B', packed)
def is_in_ranges(number):
"""
check if the number is in the range of uint32
:param number:
:return:
"""
if (7 <= number <= 10) or (13 <= number <= 16) or (35 <= number <= 36):
return True
return False
def uint8s_to_uint32(byte1, byte2, byte3, byte4):
# Pack the four uint8 values into a single uint32 value in little-endian order
packed = pack('<4B', byte1, byte2, byte3, byte4)
# Unpack the packed bytes into a uint32 value
return unpack('<I', packed)[0]
def uint8s_to_float(byte1, byte2, byte3, byte4):
# Pack the four uint8 values into a single float value in little-endian order
packed = pack('<4B', byte1, byte2, byte3, byte4)
# Unpack the packed bytes into a float value
return unpack('<f', packed)[0]
def print_hex(data):
hex_values = [f'{byte:02X}' for byte in data]
print(' '.join(hex_values))
def get_enum_by_index(index, enum_class):
try:
return enum_class(index)
except ValueError:
return None
class DM_Motor_Type(IntEnum):
DM4310 = 0
DM4310_48V = 1
DM4340 = 2
DM4340_48V = 3
DM6006 = 4
DM8006 = 5
DM8009 = 6
DM10010L = 7
DM10010 = 8
DMH3510 = 9
DMH6215 = 10
DMG6220 = 11
class DM_variable(IntEnum):
UV_Value = 0
KT_Value = 1
OT_Value = 2
OC_Value = 3
ACC = 4
DEC = 5
MAX_SPD = 6
MST_ID = 7
ESC_ID = 8
TIMEOUT = 9
CTRL_MODE = 10
Damp = 11
Inertia = 12
hw_ver = 13
sw_ver = 14
SN = 15
NPP = 16
Rs = 17
LS = 18
Flux = 19
Gr = 20
PMAX = 21
VMAX = 22
TMAX = 23
I_BW = 24
KP_ASR = 25
KI_ASR = 26
KP_APR = 27
KI_APR = 28
OV_Value = 29
GREF = 30
Deta = 31
V_BW = 32
IQ_c1 = 33
VL_c1 = 34
can_br = 35
sub_ver = 36
u_off = 50
v_off = 51
k1 = 52
k2 = 53
m_off = 54
dir = 55
p_m = 80
xout = 81
class Control_Type(IntEnum):
MIT = 1
POS_VEL = 2
VEL = 3
Torque_Pos = 4
class DamiaoPort:
def __init__(self, device, types, can_ids, master_ids, motor_with_torque, control_mode=Control_Type.MIT):
self.device = device
self.types = types
self.can_ids = can_ids
self.master_ids = master_ids
self.control = MotorControl(self.device, bitrate=4000000)
self.motors = [Motor(type, can_id, master_id) for type, can_id, master_id in zip(types, can_ids, master_ids)]
self.stat_data = []
self.stat_time = []
for motor in self.motors:
self.control.addMotor(motor)
self.control.enable(motor)
def get_present_status(self):
self.stat_time.append(time())
stat = [[
motor.goal_position,
motor.goal_tau,
motor.getPosition(),
motor.getVelocity(),
motor.getTorque(),
motor.state_tmos,
motor.state_trotor,
] for motor in self.motors]
self.stat_data.append(stat)
return stat
def save_status(self, filename):
np.savez(filename, np.array(self.stat_time), np.array(self.stat_data))
def disable(self):
for motor in self.motors:
self.control.disable(motor)
def shutdown(self):
for motor in self.motors:
self.control.controlMIT(motor, 0, 0, 0, 0, 0)
self.control.canbus.shutdown()
def set_zero_position(self):
for motor in self.motors:
self.control.disable(motor)
sleep(1)
for motor in self.motors:
self.control.set_zero_position(motor)
sleep(1)
for motor in self.motors:
self.control.enable(motor)
return 0
async def move_towards(self, goal_positions, kps, kds):
for motor, goal_position, kp, kd in zip(self.motors, goal_positions, kps, kds):
delta = goal_position - motor.getPosition()
v = motor.getVelocity()
tau = kp * delta - kd * v
motor.goal_position = goal_position
motor.goal_tau = tau
self.control.controlMIT(motor, 0, 0, 0, 0, tau)
await asyncio.sleep(0.00003)
def move_regressor_sync(self, regs, search_range, search_step, goal_positions, kps, kds):
TORQUE_SCALER=30
if len(self.stat_data) == 0:
return self.move_towards_sync(goal_positions, kps, kds)
for motor, reg, goal_position, kp, kd, stat in zip(
self.motors, regs, goal_positions, kps, kds, self.stat_data[-1]):
pos = motor.getPosition()
vel = motor.getVelocity()
delta = goal_position - pos
goal_tau = kp * delta - kd * vel
_goal_pos, _goal_tau, _pos, _vel, _tau = stat
x = np.array([[_pos, _vel, _tau, _goal_pos, _goal_tau],
[pos, vel, motor.getTorque(), goal_position, goal_tau]])
x /= np.array([[np.pi, 10, TORQUE_SCALER, np.pi, TORQUE_SCALER]])
xs = []
for tau in np.linspace(goal_tau/TORQUE_SCALER - search_range,
goal_tau/TORQUE_SCALER + search_range,
num=search_step):
x_ = x.copy()
x_[0,4] = tau
xs.append(x_.flatten())
h = reg.predict(xs)
diff = h - goal_position
tau = TORQUE_SCALER * xs[np.argmin(diff ** 2)][4]
goal_tau = tau
motor.goal_position = goal_position
motor.goal_tau = goal_tau
self.control.controlMIT(motor, 0, 0, 0, 0, goal_tau)
sleep(0.00003)
def move_towards_sync(self, goal_positions, kps, kds):
for motor, goal_position, kp, kd in zip(self.motors, goal_positions, kps, kds):
delta = goal_position - motor.getPosition()
v = motor.getVelocity()
tau = kp * delta - kd * v
motor.goal_position = goal_position
motor.goal_tau = tau
self.control.controlMIT(motor, 0, 0, 0, 0, tau)
# sleep(0.00003)
def set_goal_torque_sync(self, goal_taus):
for motor, goal_tau in zip(self.motors, goal_taus):
motor.goal_position = 0
motor.goal_tau = goal_tau
self.control.controlMIT(motor, 0, 0, 0, 0, motor.goal_tau)
sleep(0.00003)
def move_torque_sync(self, taus):
for motor,tau in zip(self.motors, taus):
motor.goal_position = 0
motor.goal_tau = tau
self.control.controlMIT(motor, 0, 0, 0, 0, motor.goal_tau)
sleep(0.00003)
def keep_torque_sync(self):
for motor in self.motors:
self.control.controlMIT(motor, 0, 0, 0, 0, motor.goal_tau)
sleep(0.00003)
async def set_goal_positions(self, goal_positions, kps):
for motor, goal_position, kp in zip(self.motors, goal_positions, kps):
motor.goal_position = goal_position
motor.goal_tau = 0
self.control.controlMIT(motor, kp, 1.2, goal_position, 0, 0)
await asyncio.sleep(0.00003)
def set_goal_positions_sync(self, goal_positions, kps, kds):
for motor, goal_position, kp, kd in zip(self.motors, goal_positions, kps, kds):
motor.goal_position = goal_position
motor.goal_tau = 0
self.control.controlMIT(motor, kp, kd, goal_position, 0, 0)
sleep(0.00003)
def set_goal_posvel(self, goal_positions):
for motor, goal_position in zip(self.motors, goal_positions):
motor.goal_position = goal_position
motor.goal_tau = 0
self.control.control_pos_force(motor, goal_position, 1, 1)
def controlMIT(self, motor, kp, kd, q, dq, tau):
self.control.controlMIT(self.motors[motor], kp, kd, q, dq, tau)
- Create the damiao_test.py file
Copy the following code to damiao_test.py
damiao_motor.py
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
import time
import math
import numpy as np
from damiao_motor import Motor, MotorControl, DM_Motor_Type, Control_Type
# Configuration parameters
NUM_MOTORS = 1 # Number of motors to control
CAN_INTERFACE = "can0" # CAN interface name
CAN_BITRATE = 1000000 # CAN bus baud rate
MOTOR_TYPE = DM_Motor_Type.DM4310 # Motor model
# Sine wave parameters
FREQUENCY = 0.1 # Frequency (Hz)
AMPLITUDE = 6 # Amplitude (rad)
DURATION = 60.0 # Operation duration (s)
def main():
# Create motor controller object
control = MotorControl(CAN_INTERFACE, bitrate=CAN_BITRATE)
# Create and add motors
motors = []
for i in range(NUM_MOTORS):
motor = Motor(MOTOR_TYPE, i + 1, i + 0X10) # CAN IDs start from 1
control.addMotor(motor)
motors.append(motor)
control.enable(motor)
print(f"Motor {i + 1} enabled")
try:
start_time = time.time()
while time.time() - start_time < DURATION:
current_time = time.time() - start_time
# Calculate sine wave position
position = AMPLITUDE * math.sin(2 * math.pi * FREQUENCY * current_time)
# Control all motors
for motor in motors:
control.controlMIT(
motor,
kp=10.0, # Position gain
kd=1.0, # Velocity gain
q=position, # Target position
dq=0.0, # Target velocity
tau=0.0 # Feedforward torque
)
# Control frequency
time.sleep(0.001) # 1kHz control frequency
except KeyboardInterrupt:
print("\nProgram interrupted by user")
finally:
# Disable all motors
for motor in motors:
control.disable(motor)
print(f"Motor {motor.SlaveID} disabled")
if __name__ == "__main__":
main()
- Run damiao_test.py
python damiao_test.py
The motor will light up green and rotate at a sinusoidal speed.
Tech Support & Product Discussion
Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.