DashCamNet y PeopleNet con Jetson Xavier NX Multicámara
Introducción
Hoy en día, en los campos de la conducción autónoma, grabación de automóviles y monitoreo de violaciones, a menudo usamos inteligencia artificial para ayudarnos a identificar información de vehículos, placas de matrícula de vehículos y obstáculos circundantes. Gracias a la gran cantidad de modelos preentrenados proporcionados por Nvidia NGC, podemos realizar estas tareas complejas más fácilmente.
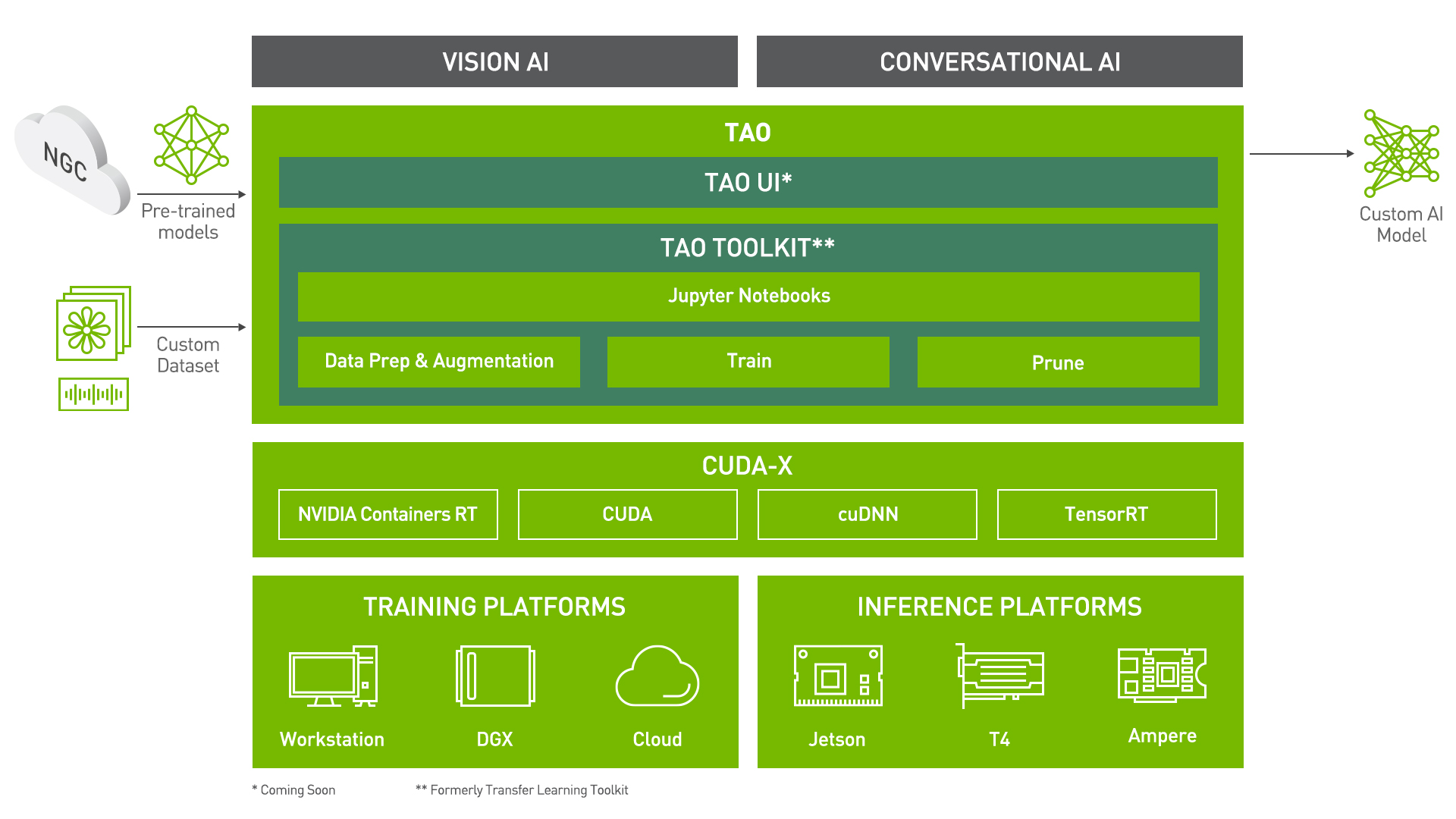
Crear un modelo de IA/aprendizaje automático desde cero puede costarte mucho tiempo y dinero. Transfer learning es una técnica popular que se puede usar para extraer características aprendidas de un modelo de red neuronal existente a uno nuevo. El NVIDIA TAO(Train, Adapt, and Optimize) Toolkit es una solución basada en CLI y Jupyter notebook de NVIDIA TAO, que abstrae la complejidad del framework de IA/aprendizaje profundo, permitiéndote ajustar modelos de IA preentrenados de alta calidad de NVIDIA con solo una fracción de los datos comparado con entrenar desde cero.
El TAO Toolkit también soporta más de 100 permutaciones de arquitecturas de modelos optimizadas por NVIDIA y backbones como EfficientNet, YOLOv3/v4, RetinaNet, FasterRCNN, UNET, y muchos más.
Gracias al repositorio de NVIDIA y al proyecto de Tomasz, vamos a detectar automóviles y personas con multicámara desplegada en Jetson Xavier NX. Tanto el Jetson SUB Mini PC son buenos para esta demostración.
NVIDIA TAO Toolkit anteriormente se llamaba NVIDIA Transfer Learning Toolkit(Tlt).
Requisitos de Materiales
Configuración de Hardware

- Cámara web USB / Raspberry Pi Camera V2.1 / cámaras IMX219-130 8MP / cámaras IMX477 de alta calidad 12.3MP

- Pantalla con interfaz HDMI, DP o eDP
- PC con sistema operativo de distribución Linux
Configuración de Software
- Jetpack 4.5 o 4.6 para Jetson Xavier NX
- Docker
- DeepStream
- TAO Toolkit
- Python3.6 con Pypi(python3-pip) y Entornos Virtuales
- NVIDIA Container Toolkit
Los métodos de instalación de software se proporcionarán en los siguientes pasos.
Pre-instalación
Antes de comenzar el proyecto, necesitamos instalar Docker Engine en Ubuntu. Hay varias formas de instalar Docker Engine y puedes elegir cualquier forma dependiendo de tus necesidades. Si ya lo has configurado, puedes omitir este paso.
- La mayoría de los usuarios configuran los repositorios de Docker e instalan desde ellos para facilitar las tareas de instalación y actualización, que es el enfoque recomendado.
- Algunos usuarios descargan el paquete DEB y lo instalan manualmente y gestionan las actualizaciones completamente de forma manual. Esto es útil en situaciones como instalar Docker en sistemas aislados sin acceso a internet.
- En entornos de prueba y desarrollo, algunos usuarios eligen usar scripts de conveniencia automatizados para instalar Docker.
Aquí vamos a usar el primero. Antes de instalar docker, se requiere asegurar que la versión sea la más reciente. Los nombres de las versiones antiguas podrían ser docker, docker.io, o docker-engine, puedes verificarlo usando el siguiente comando:
sudo apt-get purge docker docker-engine docker.io containerd runc
Cuando desinstalas docker, el contenido de /var/lib/docker/, incluyendo imágenes, contenedores, volúmenes y redes, todo se conserva. Si quieres empezar con una instalación limpia, puedes consultar la sección desinstalar Docker Engine al final de esta página.
Instalar Docker usando el repositorio
Antes de instalar Docker Engine en una nueva máquina host, es necesario configurar el repositorio de Docker. Después, podemos instalar y actualizar Docker desde el repositorio.
- Paso 1. Configurar el repositorio con el paquete
apt
Actualiza el índice de paquetes apt e instala paquetes para permitir que apt use un repositorio sobre HTTPS con los siguientes comandos:
sudo apt-get update
sudo apt-get install \
ca-certificates \
curl \
gnupg \
lsb-release
Añade la clave GPG oficial de Docker:
curl -fsSL https://download.docker.com/linux/ubuntu/gpg | sudo gpg --dearmor -o /usr/share/keyrings/docker-archive-keyring.gpg
Usa el siguiente comando para configurar el repositorio estable. Para añadir el repositorio nightly o test, añade la palabra nightly o test (o ambas) después de la palabra stable en los comandos de abajo. Puedes Aprender sobre los canales nightly y test aquí.
echo \
"deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/docker-archive-keyring.gpg] https://download.docker.com/linux/ubuntu \
$(lsb_release -cs) stable" | sudo tee /etc/apt/sources.list.d/docker.list > /dev/null
- Paso 2. Instalar el Motor de Docker
Actualiza el índice de paquetes apt, e instala la última versión del Motor de Docker y containerd con los siguientes comandos:
sudo apt-get update
sudo apt-get install docker-ce docker-ce-cli containerd.io
Podemos verificar si el Motor de Docker está instalado correctamente ejecutando la imagen hello-world.
sudo docker run hello-world
- Paso 3. Gestionar Docker como un usuario no root con los siguientes procesos.
Crear el grupo docker.
sudo groupadd docker
Añadir el usuario al grupo docker.
sudo usermod -aG docker $USER
Cerrar sesión y volver a iniciar sesión para reevaluar la membresía del grupo.
Verificar que puedes ejecutar comandos docker sin sudo ejecutando hello-world
docker run hello-world
- Paso 4. Configurar el NVIDIA Container Toolkit con los siguientes procesos:
Configurar el repositorio stable y la clave GPG:
distribution=$(. /etc/os-release;echo $ID$VERSION_ID) \
&& curl -s -L https://nvidia.github.io/nvidia-docker/gpgkey | sudo apt-key add - \
&& curl -s -L https://nvidia.github.io/nvidia-docker/$distribution/nvidia-docker.list | sudo tee /etc/apt/sources.list.d/nvidia-docker.list
Actualizar la lista de paquetes e instalar el paquete nvidia-docker2 (y dependencias):
sudo apt-get update
sudo apt-get install -y nvidia-docker2
Reiniciar el daemon de Docker para completar la instalación después de configurar el runtime predeterminado:
sudo systemctl restart docker
Comenzando
Instalar NVIDIA GPU Cloud CLI ARM64 Linux
NVIDIA GPU Cloud (NGC) CLI es una interfaz de línea de comandos basada en Python para gestionar contenedores Docker en el NGC Container Registry. Con NGC CLI, puedes realizar muchas de las mismas operaciones que están disponibles desde el sitio web de NGC, como ejecutar trabajos y ver repositorios Docker dentro de tu organización y espacio de equipo.
- Paso 1. Ve a la página Download CLI y descarga el archivo zip que contiene el binario. El binario NGC CLI para ARM64 es compatible con Ubuntu 18.04 y distribuciones posteriores.

- Paso 2. Transfiere el archivo zip a un directorio donde tengas permisos y descomprímelo y finalmente ejecuta el binario.
También puedes descargar, descomprimir e instalar desde la línea de comandos moviéndote a un directorio donde tengas permisos de ejecución y luego ejecutando el siguiente comando:
wget -O ngccli_arm64.zip https://ngc.nvidia.com/downloads/ngccli_arm64.zip && unzip -o ngccli_arm64.zip && chmod u+x ngc
Verifica el hash md5 del binario para asegurar que el archivo no se corrompió durante la descarga:
md5sum -c ngc.md5
- Paso 3. Añade tu directorio actual al path:
echo "export PATH=\"\$PATH:$(pwd)\"" >> ~/.bash_profile && source ~/.bash_profile
Debes configurar NGC CLI para tu uso con el fin de ejecutar los comandos.
- Paso 4. Ingresa el siguiente comando, incluyendo tu clave API cuando se te solicite:
ngc config set
Generación de clave API de NGC
Se requiere una clave API para configurar NGC CLI, podemos generarla a través del sitio web de NGC.
- Paso 1. Ve al sitio web y haz clic en "Sign In/Sign Up".

- Paso 2. Registra una cuenta como desarrollador de NVIDIA.

- Paso 3. Elige una cuenta para continuar.

- Paso 4. Haz clic en "Setup" en la esquina superior derecha de la página.

- Paso 5. Selecciona "Get API Key".

- Paso 6. Haz clic en "Generate API Key".

- Paso 7. La clave API se mostrará en la parte inferior de la página.

Instalar el TAO Toolkit
Python3 y python3-pip deben instalarse primero:
sudo apt install -y python3 python3-pip
TAO Toolkit es un paquete pip de Python que está alojado en el NVIDIA PyIndex. El paquete utiliza la API REST de docker internamente para interactuar con el registro de Docker de NGC para extraer e instanciar los contenedores docker subyacentes. En los pasos anteriores, ya hemos configurado una cuenta NGC y generado una clave API asociada con ella. Si deseas ver más sobre la sección Prerrequisitos de Instalación, puedes hacer clic en ella para obtener detalles sobre cómo crear una cuenta NGC y obtener una clave API.
Entorno Virtual - Virtualenv
Un Entorno Virtual es una copia de trabajo aislada de Python que te permite trabajar en un proyecto específico sin preocuparte por afectar otros proyectos. Por ejemplo, puedes trabajar en un proyecto que requiere Django 1.3 mientras procesas un proyecto que requiere Django 1.0. Puedes hacer clic aquí para crear entornos Python aislados.
Se recomienda encarecidamente configurar un entorno virtual primero y luego instalar el TAO Toolkit.
- Puedes instalar virtualenv a través de pip:
pip install virtualenv
- Crear un entorno virtual:
virtualenv venv
Esto crea una copia de Python en cualquier directorio donde ejecutes el comando, colocándola en una carpeta llamada venv.
- Activa el entorno virtual:
source venv/bin/activate
- Si has terminado de trabajar en el entorno virtual por el momento, puedes desactivarlo:
deactivate
Esto te devuelve al intérprete de Python predeterminado del sistema con todas sus librerías instaladas.
Para eliminar un entorno virtual, simplemente elimina su carpeta.
virtualenvwarpper
Sin embargo, después de un tiempo, podrías terminar con muchos entornos virtuales dispersos por tu sistema, y es posible que olvides sus nombres o dónde fueron ubicados. Por lo tanto, estamos usando virtualenvwarpper. El virtualenvwrapper proporciona un conjunto de comandos que hace que trabajar con entornos virtuales sea mucho más agradable. También coloca todos tus entornos virtuales en un solo lugar.
Puedes instalar (asegúrate de que virtualenv ya esté instalado):
pip install virtualenvwrapper
export WORKON_HOME=~/Envs
source /usr/local/bin/virtualenvwrapper.sh
Si quieres ver más información al respecto, por favor consulta las Instrucciones completas de instalación de virtualenvwrapper.)
Puedes seguir las instrucciones en este enlace para configurar un virtualenv de Python usando un virtualenvwrapper.
Establecer la versión de Python en el Entorno Virtual
-
Paso 1. Una vez que hayas seguido las instrucciones para instalar
virtualenvyvirtualenvwrapper, establece la versión de Python en elvirtualenv. Esto se puede hacer de cualquiera de las siguientes maneras: -
Definiendo la variable de entorno llamada VIRTUALENVWRAPPER_PYTHON. Esta variable debe apuntar a la ruta donde el binario de python3 está instalado en tu máquina local. También puedes agregarla a tu
.bashrco.bash_profilepara configurar tuvirtualenvde Python por defecto.
export VIRTUALENVWRAPPER_PYTHON=/usr/bin/python3
- Configurando la ruta al binario de python3 al crear tu
virtualenvusando el wrappervirtualenvwrapper
mkvirtualenv launcher -p /path/to/your/python3
- Paso 2. Una vez que hayas iniciado sesión en el
virtualenv, el símbolo del sistema debería mostrar el nombre de tu entorno virtual
(launcher) py-3.6.9 desktop:
- Paso 3. Cuando hayas terminado con tu sesión, puedes desactivar tu
virtualenvusando el comandodeactivate:
deactivate
-
Paso 4. Puedes reinstanciar este entorno
virtualenvcreado usando el comandoworkon.workon launcher
Instalar el paquete TAO
-
paso 1. Ya hemos configurado el entorno que necesitamos. Ahora podemos instalar el paquete Python TAO Launcher llamado
nvidia-taocon el siguiente comando.pip3 install nvidia-pyindex
pip3 install nvidia-tao -
paso 2. Invoca los puntos de entrada usando el comando
tao.
tao --help
La salida de muestra del comando anterior es:
usage: tao [-h]
{list,stop,info,augment,bpnet,classification,detectnet_v2,dssd,emotionnet,faster_rcnn,fpenet,gazenet,gesturenet,
heartratenet,intent_slot_classification,lprnet,mask_rcnn,punctuation_and_capitalization,question_answering,
retinanet,speech_to_text,ssd,text_classification,converter,token_classification,unet,yolo_v3,yolo_v4,yolo_v4_tiny}
...
Launcher for TAO
optional arguments:
-h, --help show this help message and exit
tasks:
{list,stop,info,augment,bpnet,classification,detectnet_v2,dssd,emotionnet,faster_rcnn,fpenet,gazenet,gesturenet,heartratenet
,intent_slot_classification,lprnet,mask_rcnn,punctuation_and_capitalization,question_answering,retinanet,speech_to_text,
ssd,text_classification,converter,token_classification,unet,yolo_v3,yolo_v4,yolo_v4_tiny}
-
paso 3. Nota que bajo tareas puedes ver todas las tareas invocables por el lanzador. Las siguientes son las tareas específicas que ayudan con el manejo de los comandos lanzados usando el Lanzador TAO:
- list
- stop
- info
Precaución: Si la terminal informa "bash: Cannot find tao", por favor usa este comando:
export PATH=$PATH:~/.local/bin
tao --help
Instalar DeepStream5
- Paso 1. Edita
/etc/apt/sources.list.d/nvidia-l4t-apt-source.listy reemplaza .6 con .5:
deb https://repo.download.nvidia.com/jetson/common r32.5 main
#deb https://repo.download.nvidia.com/jetson/common r32.6 main
deb https://repo.download.nvidia.com/jetson/t194 r32.5 main
#deb https://repo.download.nvidia.com/jetson/t194 r32.6 main
- Paso 2. Escribe
sudo apt updatee intenta nuevamente instalar DeepStream 5.1.
Y luego instálalo con el siguiente comando:
sudo -H pip3 install pyds-ext
Para más información, por favor consulta los enlaces a continuación:
Instalar Jetson Multicamera Pipelines e Inicio Rápido
Finalmente, vamos a construir un pipeline típico de múltiples cámaras, es decir, N×(captura)->preprocesamiento->lote->DNN-> tu lógica de aplicación aquí ->codificación->E/S de archivos + visualización, utilizando gstreamer y deepstream internamente. Proporciona acceso programático para configurar el pipeline en python a través del paquete jetmulticam.
Este proyecto utiliza la aceleración HW de Nvidia para un uso mínimo de CPU. Por ejemplo, puedes realizar detección de objetos en tiempo real en 6 flujos de cámara usando tan solo 16.5% de CPU. Puedes construir fácilmente tu lógica personalizada en python accediendo a los datos de imagen (vía np.array), así como a los resultados de detección de objetos.
- Paso 1. Instala Jetson Multicamera Pipelines con el siguiente comando:
git clone https://github.com/NVIDIA-AI-IOT/jetson-multicamera-pipelines.git
cd jetson-multicamera-pipelines
bash scripts/install_dependencies.sh
sudo -H pip3 install Cython
sudo -H pip3 install .
- Paso 2. Ejecuta el ejemplo con tus cámaras:
source scripts/env_vars.sh
cd examples
sudo -H python3 example.py
Este es el 'example.py', puedes aplicarlo tanto a cámara monocular como a múltiples cámaras.
import time
from jetmulticam import CameraPipelineDNN
from jetmulticam.models import PeopleNet, DashCamNet
if __name__ == "__main__":
pipeline = CameraPipelineDNN(
cameras=[2, 5, 8],
models=[
PeopleNet.DLA1,
DashCamNet.DLA0,
# PeopleNet.GPU
],
save_video=True,
save_video_folder="/home/nx/logs/videos",
display=True,
)
while pipeline.running():
arr = pipeline.images[0] # np.array con forma (1080, 1920, 3), es decir, (imagen RGB 1080p)
dets = pipeline.detections[0] # Detecciones de las DNNs
time.sleep(1/30)
Este es el resultado de múltiples cámaras mostrado así:
Más
Hay más modelos / aceleradores soportados:
pipeline = CameraPipelineDNN(
cam_ids = [0, 1, 2]
models=[
models.PeopleNet.DLA0,
models.PeopleNet.DLA1,
models.PeopleNet.GPU,
models.DashCamNet.DLA0,
models.DashCamNet.DLA1,
models.DashCamNet.GPU
]
# ...
)
Precaución: Si la terminal informa "EGL Not found", por favor revisa EGLDevice.
Soporte Técnico y Discusión de Productos
¡Gracias por elegir nuestros productos! Estamos aquí para brindarle diferentes tipos de soporte para asegurar que su experiencia con nuestros productos sea lo más fluida posible. Ofrecemos varios canales de comunicación para satisfacer diferentes preferencias y necesidades.