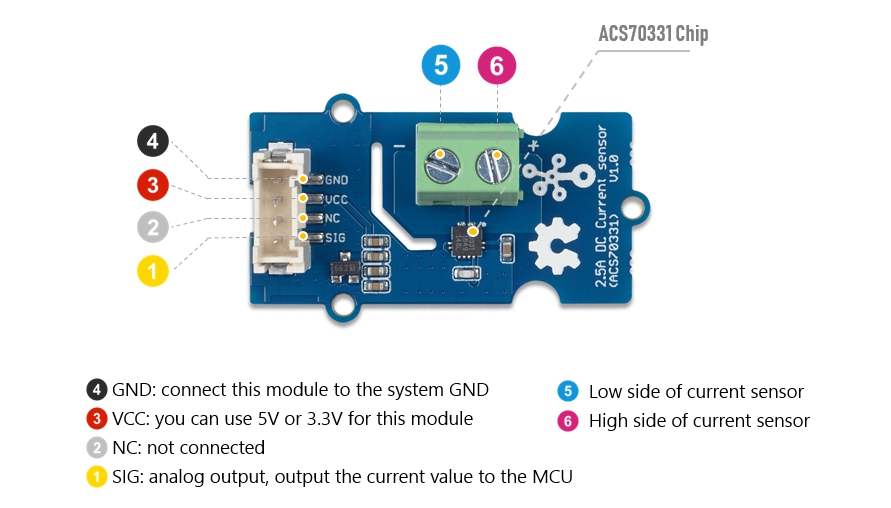
Grove - Sensor de Corriente DC de 2.5A (ACS70331)
El Grove - Sensor de Corriente DC de 2.5A (ACS70331) es un sensor de corriente DC de alta precisión basado en ACS70331. El ACS70331 es una serie de chips, este módulo utiliza ACS70331EESATR-2P5U3, que es el IC sensor de corriente de alta sensibilidad de Allegro para aplicaciones de detección de corriente <2.5 A. Incorpora tecnología de resistencia magnética gigante (GMR) que es 25 veces más sensible que los sensores de efecto Hall tradicionales para detectar el campo magnético generado por la corriente que fluye a través del conductor primario integrado de baja resistencia.
El Grove - Sensor de Corriente DC de 2.5A (ACS70331) puede medir la corriente DC hasta 2.5A y tiene una sensibilidad base de 800mV/A. Este sensor no soporta corriente AC, si desea medir la carga AC por favor consulte el:
Grove - Sensor de Corriente DC de 2.5A (ACS725)

Características
- Ancho de banda de 1 MHz con tiempo de respuesta <550 ns
- Bajo ruido: 8 mA(rms) a 1 MHz
- Resistencia del conductor primario de 1.1 mΩ resulta en baja pérdida de potencia
- Alto PSRR DC permite el uso con fuentes de alimentación de baja precisión o baterías (operación de 3 a 4.5 V)
- Salida analógica
Especificaciones
| Parámetro | Valor |
|---|---|
| Voltaje de alimentación | 3.3V / 5V |
| Temperatura ambiente de operación | -40 – 85℃ |
| Temperatura de almacenamiento | - 65°C – 125°C |
| Voltaje de trabajo | <100V |
| Rango de detección de corriente | 0 – 2.5A |
| Sensibilidad | 800mV/A(Típ.) |
| Interfaz de salida | Analógica |
| Interfaz de entrada | Terminal de tornillo |
Principio de Funcionamiento
Existen dos tipos de detección de corriente: directa e indirecta. La clasificación se basa principalmente en la tecnología utilizada para medir la corriente.
Detección directa:
- Ley de Ohm
Detección indirecta:
- Ley de Inducción de Faraday
- Sensores de campo magnético
- Efecto Faraday
El Grove - Sensor de Corriente DC de 2.5A (ACS70331) utiliza tecnología de sensores de campo magnético. Y existen tres tipos de tecnología de sensores de campo magnético:
- Efecto Hall
- Sensores de compuerta de flujo
- Sensor de corriente magneto-resistivo
El Grove - Sensor de Corriente DC de 2.5A (ACS70331) se basa en el principio del sensor de corriente magneto-resistivo, que también se conoce como GMR. Un magneto-resistor (MR) es un dispositivo de dos terminales que cambia su resistencia parabólicamente con el campo magnético aplicado. Esta variación de la resistencia del MR debido al campo magnético se conoce como el Efecto Magnetoresistivo.
La construcción interna del paquete QFN del ACS70331 se muestra en la Figura 2. El chip se sitúa sobre la trayectoria de corriente primaria de tal manera que se produce un campo magnético en el plano con los elementos GMR en el chip. Los elementos GMR 1 y 2 detectan el campo en la dirección +X para el flujo de corriente IP positiva, y los elementos GMR 3 y 4 detectan el campo en la dirección –X para el flujo de corriente IP positiva. Esto permite la medición diferencial de la corriente y el rechazo de campos externos dispersos.

Los cuatro elementos GMR están dispuestos en una configuración de puente de Wheatstone como se muestra en la Figura 2, de tal manera que la salida del puente es proporcional al campo diferencial detectado por los cuatro elementos, rechazando campos comunes.

Descripción del Hardware
Plataformas Compatibles
| Arduino | Raspberry Pi | |||
|---|---|---|---|---|
Comenzando
Está prohibido que el cuerpo humano toque el módulo durante la prueba, de lo contrario existe peligro de descarga eléctrica.
Jugar con Arduino
Materiales requeridos
| Seeeduino V4.2 | Base Shield | Sensor de Corriente DC de 2.5A (ACS70331) |
|---|---|---|
 |  |  |
| Obtener UNO Ahora | Obtener UNO Ahora | Obtener UNO Ahora |
Además, puedes considerar nuestro nuevo Seeeduino Lotus M0+, que es equivalente a la combinación de Seeeduino V4.2 y Baseshield.
1 Por favor conecta el cable USB suavemente, de lo contrario podrías dañar el puerto. Por favor usa el cable USB con 4 cables en el interior, el cable de 2 cables no puede transferir datos. Si no estás seguro sobre el cable que tienes, puedes hacer clic aquí para comprar
2 Cada módulo Grove viene con un cable Grove cuando lo compras. En caso de que pierdas el cable Grove, puedes hacer clic aquí para comprar.
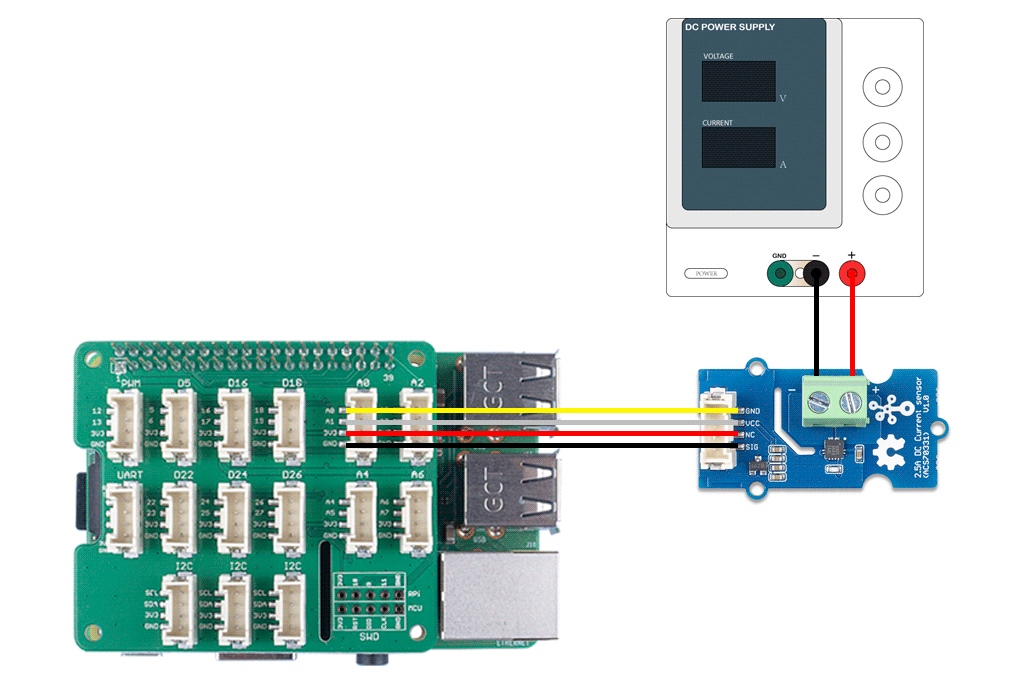
Conexión de Hardware
-
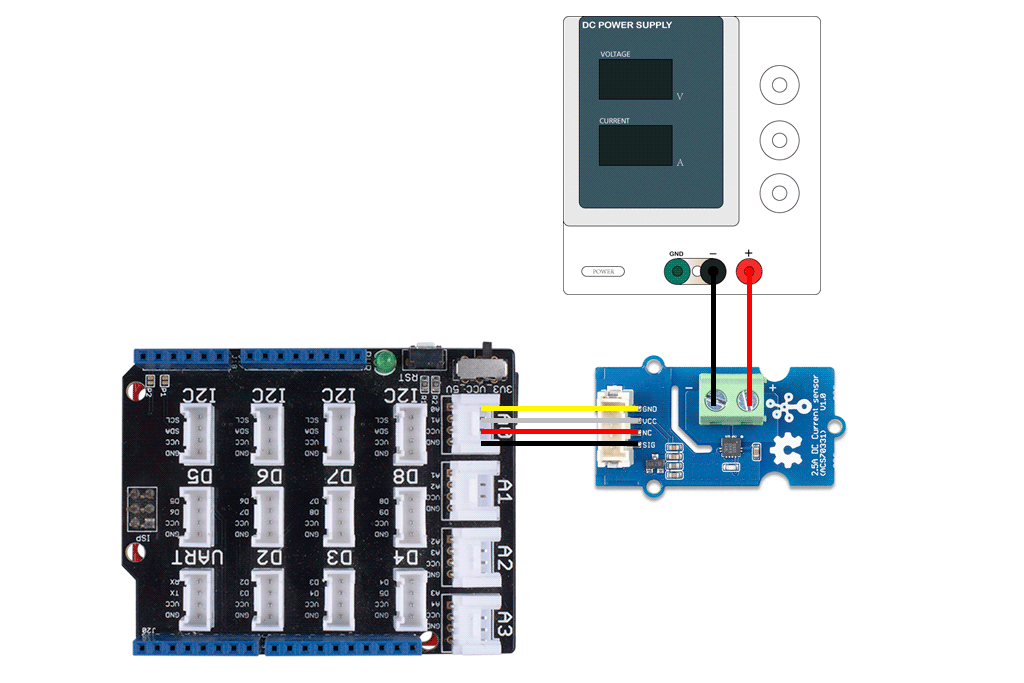
Paso 1. Conecta el Grove - Sensor de Corriente DC de 2.5A (ACS70331) al puerto A0 del Base Shield.
-
Paso 2. Conecta los polos positivo y negativo del circuito a probar a los correspondientes polos positivo y negativo del terminal de tornillo.
Si inviertes los polos positivo y negativo, la lectura será invertida. Este sensor necesita calibración antes del uso, así que por favor no enciendas el circuito primero.
-
Paso 3. Conecta Grove - Base Shield en Seeeduino.
-
Paso 4. Conecta Seeeduino a la PC mediante un cable USB.
Software
Si esta es la primera vez que trabajas con Arduino, te recomendamos encarecidamente que veas Comenzando con Arduino antes de empezar.
-
Paso 1. Descarga la Librería Grove Current Sensor desde Github.
-
Paso 2. En la carpeta /example/, puedes encontrar el código de demostración. Aquí tomamos el Grove_2_5A_Current_Sensor.ino como ejemplo. Solo haz clic en Grove_2_5A_Current_Sensor.ino para abrir la demostración. O puedes copiar el siguiente código:
#ifdef ARDUINO_SAMD_VARIANT_COMPLIANCE
#define RefVal 3.3
#define SERIAL SerialUSB
#else
#define RefVal 5.0
#define SERIAL Serial
#endif
//An OLED Display is required here
//use pin A0
#define Pin A0
// Take the average of 10 times
const int averageValue = 10;
int sensorValue = 0;
float sensitivity = 1000.0 / 800.0; //1000mA per 800mV
float Vref = 265; //Firstly,change this!!!
void setup()
{
SERIAL.begin(9600);
}
void loop()
{
// Read the value 10 times:
for (int i = 0; i < averageValue; i++)
{
sensorValue += analogRead(Pin);
// wait 2 milliseconds before the next loop
delay(2);
}
sensorValue = sensorValue / averageValue;
// The on-board ADC is 10-bits
// Different power supply will lead to different reference sources
// example: 2^10 = 1024 -> 5V / 1024 ~= 4.88mV
// unitValue= 5.0 / 1024.0*1000 ;
float unitValue= RefVal / 1024.0*1000 ;
float voltage = unitValue * sensorValue;
//When no load,Vref=initialValue
SERIAL.print("initialValue: ");
SERIAL.print(voltage);
SERIAL.println("mV");
// Calculate the corresponding current
float current = (voltage - Vref) * sensitivity;
// Print display voltage (mV)
// This voltage is the pin voltage corresponding to the current
/*
voltage = unitValue * sensorValue-Vref;
SERIAL.print(voltage);
SERIAL.println("mV");
*/
// Print display current (mA)
SERIAL.print(current);
SERIAL.println("mA");
SERIAL.print("\n");
// Reset the sensorValue for the next reading
sensorValue = 0;
// Read it once per second
delay(1000);
}
-
Paso 3. Sube la demostración. Si no sabes cómo subir el código, por favor revisa Cómo subir código.
-
Paso 4. Abre el Monitor Serie del IDE de Arduino haciendo clic en Herramienta-> Monitor Serie. O presiona las teclas
ctrl+shift+mal mismo tiempo. Establece la velocidad de baudios a 9600. -
Paso 5. Calibración
Cuando no hay corriente fluyendo, el sensor aún tendrá un pequeño valor de salida. Llamamos a este valor desplazamiento cero.
Debido a la presencia del desplazamiento cero, el sensor también tendrá una lectura cuando no hay corriente. Así que establecemos un parámetro Vref para corregirlo, puedes encontrarlo en el bloque de código anterior.
Línea 21:
float Vref = 265;
//Vref is zero drift value, you need to change this value to the value you actually measured before using it.
En el código de demostración, establecemos el Vref a 265, sin embargo, el valor de desplazamiento cero varía de placa a placa. Como sabes, la placa que usamos en esta demostración es 283.20. Así que modifiquemos la Línea 21:
float Vref = 283;
//Vref is zero drift value, you need to change this value to the value you actually measured before using it.
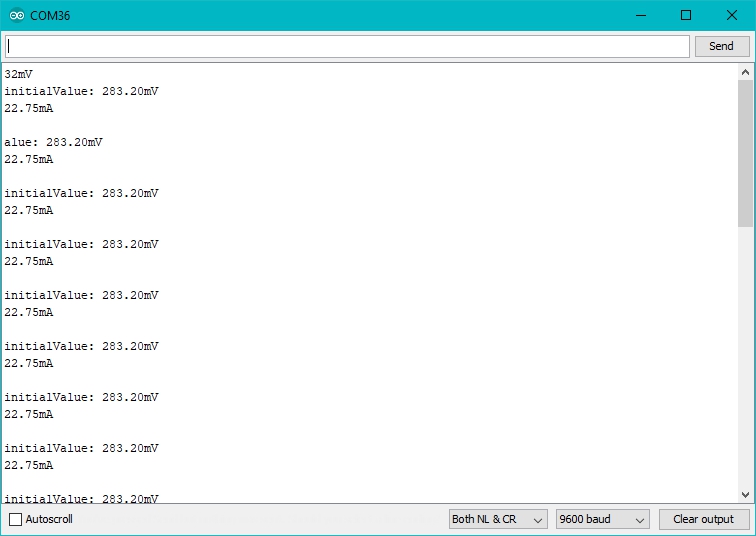
Ahora subamos el código modificado y verifiquemos el resultado:
Cuando la salida de corriente se convierte en 0mA o un valor pequeño, has completado la calibración.
- Paso 5. Ahora es todo tuyo, puedes encender la corriente. Por favor siéntete libre de usarlo, ¡recuerda que este es un Sensor de Corriente DC de 2.5A, la corriente no puede exceder 2.5A!
Si quieres conocer la fórmula de cálculo del resultado, por favor consulta las FAQ Q1
Jugar con Raspberry
Materiales requeridos
| Raspberry pi | Grove Base Hat para RasPi | Sensor de Corriente DC 2.5A |
|---|---|---|
 |  | |
| Obtener UNO Ahora | Obtener UNO Ahora | Obtener UNO Ahora |
Conexión de Hardware
-
Paso 1. Conecta el Grove Base Hat al Raspberry Pi.
-
Paso 2. Conecta el Grove - Sensor de Corriente DC 2.5A(ACS70331) al puerto A0 del Base Hat.
-
Paso 3. Conecta los polos positivo y negativo del circuito a probar a los correspondientes polos positivo y negativo del terminal de tornillo.
Si inviertes los polos positivo y negativo, la lectura será invertida. Este sensor necesita calibración antes del uso, así que por favor no enciendas el circuito primero.
- Paso 4. Alimenta el Raspberry Pi a través del cable Micro-USB.
Puedes alimentar el Raspberry Pi por el puerto USB de la computadora o adaptador DC, sin embargo, si estás usando el Raspberry pi 3B+, te recomendamos encarecidamente que lo alimentes por adaptador DC, si usas el puerto USB de la PC, puedes dañar el Raspberry Pi 3B+.
Software
-
Paso 1. Sigue Configuración de Software para configurar el entorno de desarrollo.
-
Paso 2. Descarga el archivo fuente clonando la biblioteca grove.py.
cd ~
git clone https://github.com/Seeed-Studio/grove.py
- Paso 3. Ejecuta los siguientes comandos para ejecutar el código.
cd grove.py/grove # to enter the demo file folder
python grove_current_sensor.py 0 2.5A # to run the demo program
Entonces la terminal mostrará la siguiente salida:
pi@raspberrypi:~/grove.py/grove $ python grove_current_sensor.py 0 2.5A
pin_voltage(mV):
270
current(mA):
13.0
()
pin_voltage(mV):
270
current(mA):
13.0
()
pin_voltage(mV):
270
current(mA):
13.0
()
pin_voltage(mV):
269
current(mA):
11.0
()
pin_voltage(mV):
270
current(mA):
13.0
()
^CTraceback (most recent call last):
File "grove_current_sensor.py", line 200, in <module>
main()
File "grove_current_sensor.py", line 185, in main
time.sleep(1)
KeyboardInterrupt
Presiona ctrl+c+ para salir.
Ten en cuenta el segundo comando. Hay dos parámetros después del nombre del archivo:
-
0 significa que el sensor está conectado al puerto A0. Si conectas el sensor al puerto A2, entonces necesitas cambiar este parámetro a 2. Este parámetro tiene un rango de 0-7, pero si usas el sombrero base Grove, solo puedes usar 0/2/4/6 debido a las limitaciones físicas de la interfaz.
-
2.5A significa que el tipo de sensor de corriente es 2.5A DC
| Sensor | Tipo de corriente | Valor del parámetro |
|---|---|---|
| Grove - 2.5A DC Current Sensor(ACS70331) | DC | 2.5A |
| Grove - 2.5A DC Current Sensor (ACS725) | DC | 5A_DC |
|AC |5A_AC Grove - 10A DC Current Sensor (ACS725) |DC |10A
Ten en cuenta que el sensor de corriente DC de 2.5A tendrá un gran error al medir un rango pequeño, por lo que se recomienda que proporciones una corriente de más de 200mA para las pruebas. Además, el entorno de medición afectará la precisión, como que la ondulación del voltaje de alimentación sea lo más pequeña posible.
-
Paso 4 Calibración.
Cuando no hay corriente fluyendo, el sensor aún tendrá un pequeño valor de salida. Llamamos a este valor desplazamiento cero. Como puedes ver, en el paso 3, el desplazamiento cero de esta placa es 270mV, convertido en corriente es 13mA.
Debido a la presencia del desplazamiento cero, el sensor también tendrá una lectura cuando no hay corriente. Así que establecemos un parámetro Vref para corregirlo, puedes encontrarlo en el python grove_current_sensor.py. Para el Grove - 2.5A DC Current Sensor(ACS70331), establecemos el Vref a 260 por defecto, sin embargo el desplazamiento cero varía de placa a placa. Por eso necesitamos hacer la calibración primero.
Revisa el código python a continuación:
#!/usr/bin/env python
# -*- coding: utf-8 -*-
#
# The MIT License (MIT)
# Copyright (C) 2018 Seeed Technology Co.,Ltd.
#
# This is the library for Grove Base Hat
# which used to connect grove sensors for Raspberry Pi.
'''
This is the code for
- `Grove - 2.5A DC current sensor <https://www.seeedstudio.com/Grove-2-5A-DC-Current-Sensor-ACS70331-p-2929.html>`_
- `Grove - 5A AC/DC current sensor <https://www.seeedstudio.com/Grove-5A-DC-AC-Current-Sensor-ACS70331-p-2928.html>`_
- `Grove - 10A current sensor <https://www.seeedstudio.com/Grove-10A-DC-Current-Sensor-ACS725-p-2927.html>`_
Examples:
.. code-block:: python
import time
from grove_current_sensor import Current
pin = 0
sensor_type = "2.5A"
#if use 10A current sensor input: pin = 0 , sensor_type = "10A"
if (sensor_type == "2.5A"):
sensitivity = 1000.0 / 800.0
Vref = 260
if (sensor_type == "5A_DC"):
sensitivity = 1000.0 / 200.0
Vref = 1498
if (sensor_type == "5A_AC"):
sensitivity = 1000.0 / 200.0
Vref = 1498
if (sensor_type == "10A"):
sensitivity = 1000.0 / 264.0
Vref = 322
averageValue = 500
ADC = Current()
while True:
if(sensor_type == "5A_AC"):
pin_voltage = ADC.get_nchan_vol_milli_data(pin,averageValue)
current = ADC.get_nchan_AC_current_data(pin,sensitivity,Vref,averageValue)
else:
temp = ADC.get_nchan_current_data(pin,sensitivity,Vref,averageValue)
current = temp[0]
pin_voltage = temp[1]
current = round(current)
print("pin_voltage(mV):")
print(pin_voltage)
print("current(mA):")
print(current)
print()
time.sleep(1)
'''
import sys
import time
from grove.i2c import Bus
ADC_DEFAULT_IIC_ADDR = 0X04
ADC_CHAN_NUM = 8
REG_RAW_DATA_START = 0X10
REG_VOL_START = 0X20
REG_RTO_START = 0X30
REG_SET_ADDR = 0XC0
__all__ = ['Current','Bus']
class Current():
'''
Grove Current Sensor class
'''
def __init__(self,bus_num=1,addr=ADC_DEFAULT_IIC_ADDR):
'''
Init iic.
Args:
bus_num(int): the bus number;
addr(int): iic address;
'''
self.bus = Bus(bus_num)
self.addr = addr
def get_nchan_vol_milli_data(self,n,averageValue):
'''
Get n chanel data with unit mV.
:param int n: the adc pin.
:param int averageValue: Average acquisition frequency.
Returns:
int: voltage value
'''
val = 0
for i in range(averageValue):
data = self.bus.read_i2c_block_data(self.addr,REG_VOL_START+n,2)
val += data[1]<<8|data[0]
val = val / averageValue
return val
def get_nchan_current_data(self,n,sensitivity,Vref,averageValue):
'''
2.5A/5A DC/10A cunrrent sensor get n chanel data with unit mA.
:param int n: the adc pin.
:param float sensitivity: The coefficient by which voltage is converted into current.
:param int Vref: Initial voltage at no load.
:param int averageValue: Average acquisition frequency.
Returns:
int: current value
'''
val = 0
for i in range(averageValue):
data = self.bus.read_i2c_block_data(self.addr,REG_VOL_START+n,2)
val += data[1]<<8|data[0]
val = val / averageValue
currentVal = (val - Vref) * sensitivity
return currentVal,val
def get_nchan_AC_current_data(self,n,sensitivity,Vref,averageValue):
'''
5A current sensor AC output and get n chanel data with unit mA.
:param int n: the adc pin.
:param float sensitivity: The coefficient by which voltage is converted into current.
:param int Vref: Initial voltage at no load.
:param int averageValue: Average acquisition frequency.
Returns:
int: current value
'''
sensorValue = 0
for i in range(averageValue):
data=self.bus.read_i2c_block_data(self.addr,REG_VOL_START+n,2)
val=data[1]<<8|data[0]
if(val > sensorValue):
sensorValue=val
time.sleep(0.00004)
currentVal = ((sensorValue - Vref) * sensitivity)*0.707
return currentVal
ADC = Current()
def main():
if(len(sys.argv) == 3):
pin = int(sys.argv[1])
sensor_type = sys.argv[2]
if (pin < 8 and (sensor_type == "2.5A" or sensor_type == "5A_DC" or sensor_type == "5A_AC" or sensor_type == "10A") ):
if (sensor_type == "2.5A"):
sensitivity = 1000.0 / 800.0
Vref = 260
if (sensor_type == "5A_DC"):
sensitivity = 1000.0 / 200.0
Vref = 1498
if (sensor_type == "5A_AC"):
sensitivity = 1000.0 / 200.0
Vref = 1498
if (sensor_type == "10A"):
sensitivity = 1000.0 / 264.0
Vref = 322
averageValue = 500
while True:
if(sensor_type == "5A_AC"):
pin_voltage = ADC.get_nchan_vol_milli_data(pin,averageValue)
current = ADC.get_nchan_AC_current_data(pin,sensitivity,Vref,averageValue)
else:
temp = ADC.get_nchan_current_data(pin,sensitivity,Vref,averageValue)
current = temp[0]
pin_voltage = temp[1]
current = round(current)
print("pin_voltage(mV):")
print(pin_voltage)
print("current(mA):")
print(current)
print()
time.sleep(1)
else:
print("parameter input error!")
print("Please enter parameters for example: python grove_current_sensor 0 2.5A")
print("parameter1: 0-7")
print("parameter2: 2.5A/5A_DC/5A_AC/10A")
else:
print("Please enter parameters for example: python grove_current_sensor 0 2.5A")
print("parameter1: 0-7")
print("parameter2: 2.5A/5A_DC/5A_AC/10A")
if __name__ == '__main__':
main()
Puedes modificar el Vref en la línea 147 del bloque de código anterior:
if (pin < 8 and (sensor_type == "2.5A" or sensor_type == "5A_DC" or sensor_type == "5A_AC" or sensor_type == "10A") ):
if (sensor_type == "2.5A"):
sensitivity = 1000.0 / 800.0
Vref = 260
if (sensor_type == "5A_DC"):
sensitivity = 1000.0 / 200.0
Vref = 1498
if (sensor_type == "5A_AC"):
sensitivity = 1000.0 / 200.0
Vref = 1498
if (sensor_type == "10A"):
sensitivity = 1000.0 / 264.0
Vref = 322
averageValue = 500
Como puedes ver, para el Sensor de Corriente de 2.5A el Vref predeterminado es 260, y en el Paso 3, podemos encontrar que cuando no hay corriente el valor de desplazamiento cero es 270mV. Así que vamos a cambiarlo a 270.
if (sensor_type == "2.5A"):
sensitivity = 1000.0 / 800.0
Vref = 270
Ahora, ejecutemos esta demostración nuevamente.
pi@raspberrypi:~/grove.py/grove $ python grove_current_sensor.py 0 2.5A
pin_voltage(mV):
269
current(mA):
-1.0
()
pin_voltage(mV):
270
current(mA):
0.0
()
pin_voltage(mV):
270
current(mA):
0.0
()
pin_voltage(mV):
270
current(mA):
0.0
()
pin_voltage(mV):
270
current(mA):
0.0
()
^CTraceback (most recent call last):
File "grove_current_sensor.py", line 200, in <module>
main()
File "grove_current_sensor.py", line 185, in main
time.sleep(1)
KeyboardInterrupt
Bueno, mejor que antes, ahora puedes medir la corriente con mayor precisión 😄
FAQ
P1# ¿Cuál es la fórmula de cálculo de corriente?
R1: Si piensas que la parte del principio es muy complicada, vamos a explicarlo de manera sencilla. La corriente en el circuito a probar excita el campo magnético, lo que causa que el valor de resistencia de los elementos GMR cambie. Y el cambio de resistencia en el puente causa un cambio en el voltaje a la salida del chip. Llamamos a la salida de voltaje como VIOUT.
VIOUT = Sens × Ip + VIOUT(Q)
Sens: Sens es el coeficiente que convierte la corriente en un voltaje de salida. Para este módulo es 800mA/V.
Ip: Ip es el valor de corriente en el circuito a probar, Unidad mA.
VIOUT(Q): VIOUT(Q) es la salida de voltaje cuando Ip es 0mA (lo que significa que no hay corriente en el circuito a probar), Unidad mV.
Aquí viene el valor de corriente:
Ip = (VIOUT - VIOUT(Q)) / Sens
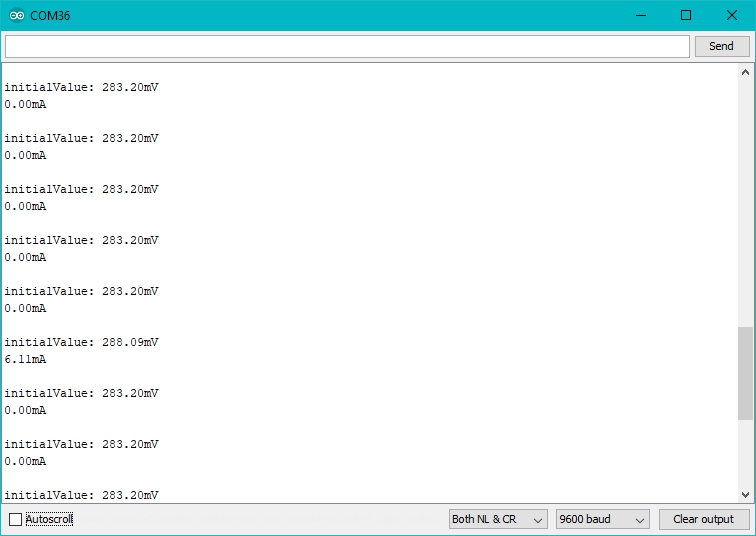
Ahora, revisemos la figura 5, explicaremos por qué el valor de corriente de la salida no es 0 cuando el valor de corriente real en el circuito a probar es 0. Como puedes ver en la figura 5, el initialValue es 283.20mV, que es el VIOUT; la corriente es 22.75mA, que es el Ip. En cuanto al VIOUT(Q), es el Vref que establecemos en el código. En la figura 5, es 265. Y el Sens es 800mA/V, que es 800mA/1000mV. Ahora, solo hagamos algunos cálculos:
{(283.20mV-265mV) / (800mA/1000mV)} = 22.75mA
Entonces, en la figura 6, cuando establecemos el Vref a 283.20, el Ip se convierte en 0mA.
Visor de Esquemas en Línea
Recursos
Soporte Técnico y Discusión de Productos
¡Gracias por elegir nuestros productos! Estamos aquí para brindarte diferentes tipos de soporte para asegurar que tu experiencia con nuestros productos sea lo más fluida posible. Ofrecemos varios canales de comunicación para atender diferentes preferencias y necesidades.